Изобретение относится к области регулирования и управления двигателями внутреннего сгорания, в частности, содержащие средства управления с электрическим приводом.
Известен электрогидравлический дистанционный привод (патент Японии №49-18678, нац.кл. 54(8)D M74 г), содержащий основные каналы управления, выполненные в виде логического блока, соединенного с основным электрогидравлическим распределителем, параллельно которым подключены резервные каналы.
Недостатком известного привода является отсутствие резервирования источников питания и распределителей в основных и резервных каналах, что снижает надежность привода.
Известен также электрогидравлический дистанционный привод по а.с.557208, преимущественно для газотурбинных двигателей, содержащий основные каналы управления, выполненные в виде логического блока, соединенного с основным электрогидравлическим распределителем, параллельно которым подключены резервные каналы, при этом, по крайней мере, один из резервных каналов выполнен в виде кнопочных замыкателей, подключенных с одной стороны к резервному источнику электропитания, а с другой - к резервному электрогидравлическому распределителю, и соединенных при помощи логического элемента ИЛИ и запоминающего блока с логическим элементом И, включенными между логическим блоком и основным электрогидравлическим распределителем.
Недостатком известного привода является его низкая надежность при управлении двигателем внутреннего сгорания на большом расстоянии от поста управления из-за отсутствия защиты по неисправности (обрыву цепей) задатчика и датчика обратной связи и из-за тяжелых условий эксплуатации датчика обратной связи электрического типа при установке исполнительного механизма и жестко связанного с ним кинематически датчика обратной связи непосредственно на двигателе внутреннего сгорания, в условиях повышенных механических воздействий и температуры от работающего двигателя.
Известен также электрогидравлический дистанционный привод для двигателя внутреннего сгорания по патенту РФ 2254502 (прототип), содержащий основные каналы управления, выполненные в виде логического блока, соединенного с основным электрогидравлическим распределителем, параллельно с которым подключены резервные каналы, при этом, по крайней мере, один из резервных каналов выполнен в виде кнопочных замыкателей, подключенных с одной стороны к резервному источнику электропитания, а с другой стороны - к резервному электрогидравлическому распределителю, и соединенных при помощи логического элемента ИЛИ и запоминающего блока с блокировочными логическими элементами И, включенными между логическим блоком и основным электрогидравлическим распределителем, и снабжен каналом защиты от обрыва цепей задатчика и датчика обратной связи, содержащим последовательно соединенный логический элемент И и запоминающий блок, причем ко входам элемента И канала защиты подключены параллельно выходы задатчика и датчика обратной связи, выход элемента И подключен к прямым входам блокировочных элементов И основных каналов управления, выход запоминающего блока подключен к аварийной сигнализации, а вход сброса запоминающего блока подключен к резервному источнику электропитания при помощи дискретного органа отмены команды, при этом гидравлический исполнительный механизм, установленный непосредственно на двигателе и связанный жесткой кинематической связью с органом управления частотой вращения двигателя, связан с электрическим датчиком обратной связи, установленным вне двигателя, гибкой кинематической обратной связью, выполненной в виде троса, размещенного внутри гибкого направляющего кожуха, закрепленного своими концами на двигателе в месте установки исполнительного механизма и вне двигателя в месте установки датчика обратной связи.
Недостатком известного привода является его недостаточная точность при управлении двигателем для точного позиционирования в пространстве объекта, на котором установлен двигатель, из-за того, что любая следящая система имеет зону нечувствительности, необходимую для исключения колебательного процесса при управлении.
При управлении на увеличение или уменьшение частоты вращения двигателя отработка исполнительного механизма в следящем режиме прекращается соответственно на нижней или верхней границе зоны нечувствительности системы, что делает положение исполнительного механизма при окончании процесса управления неоднозначным. Соответственно будет неодинакова и частота вращения двигателя.
Цель изобретения - повышение точности работы привода и расширение возможности его применения для управления двигателем, установленным на объекте, требующем точного позиционирования в пространстве.
Для этого в предлагаемом электрогидравлическом приводе для двигателя внутреннего сгорания основные каналы управления в логическом блоке снабжены каждый автоматическим корректором отработки исполнительного механизма, содержащим последовательно соединенные запоминающий блок, логический элемент И и элемент задержки времени, при этом выход элемента сравнения в каждом канале подключен в корректоре к входу записи запоминающего блока и к инверсному входу элемента И, и параллельно с выходом элемента И корректора через элемент ИЛИ к входу соответствующего блокировочного элемента И, а выход элемента И корректора подключен в корректоре через элемент задержки времени к входу сброса запоминающего блока, причем величина задержки времени соответствует отработке исполнительного механизма на величину, меньшую величины зоны нечувствительности основного канала управления и выполнена регулируемой.
На чертеже представлена функциональная схема привода.
Двигатель внутреннего сгорания 1 снабжен регулятором 2 частоты вращения, настройка которого осуществляется кинематически связанным с регулятором органом 3 ручного управления частотой вращения.
Орган управления 3 соединен жесткой кинематической связью с гидравлическим исполнительным механизмом 4, установленным непосредственно на двигателе.
Это вызвано тем, что при перемещении органа 3 могут требоваться значительные усилия и достаточно большое быстродействие.
Исполнительный механизм 4 подключен гидравлическими каналами к электрогидравлическому распределителю 5.
Задатчик 6 частоты вращения двигателя 1 и электрический датчик обратной связи 7 следящего канала управления подключены к входам логического блока 8, а в блоке 8 - к входам элементов сравнения 9 и 10.
Логический блок 8 предназначен для сравнения величины сигнала от задатчика 6 и от датчика 7.
Датчик 7, установленный вне двигателя, не подвергается механическому и тепловому воздействию двигателя, а малое усилие перестановки рычага датчика при управлении позволяет обеспечить следящее управление частотой вращения двигателя с высокой точностью.
Если сигнал от задатчика 6 больше сигнала от датчика 7, на выходе элемента сравнения 9 появляется сигнал на отработку исполнительного механизма 4 на увеличение частоты вращения двигателя. Если сигнал от задатчика 6 меньше сигнала от датчика 7, на выходе элемента сравнения 10 появляется сигнал на отработку механизма 4 на уменьшение частоты вращения двигателя.
Сигнал от элемента 9 поступает на выход блока 8 через элемент ИЛИ 11.
Сигнал от элемента 10 поступает на выход блока 8 через элемент ИЛИ 12.
Задатчик 6, датчик обратной связи 7 и элементы 9 и 11 образуют в блоке 8 основной канал управления механизмом 4 через распределитель 5 на увеличение частоты вращения двигателя.
Задатчик 6, датчик обратной связи 7 и элементы 10 и 12 образуют в блоке 8 основной канал управления механизмом 4 через распределитель 5 на уменьшение частоты вращения.
Точность отработки основных каналов определяется величиной регулировки уставок элементов 9 и 10, которая должна обеспечить астатический характер процесса отработки канала, с недопущением перерегулирования и колебательного процесса отработки канала с учетом выбега механизма 4 при прекращении подачи в него рабочей жидкости от распределителя 5.
Резервный канал управления выполнен в виде кнопочных замыкателей 13 и 14, подключенных к резервному источнику питания 15 и к резервному электрогидравлическому распределителю 16.
Выходы замыкателей 13 и 14 через логический элемент ИЛИ 17 подключены к входу записи запоминающего блока 18.
Выход блока 18 подключен к инверсным входам блокировочных логических элементов И 19 и 20, включенных между выходами элементов ИЛИ 11 и 12 основных каналов управления в блоке 8 и управляющими электромагнитами распределителя 5.
Элементы И 19 и 20 блокируют работу основных каналов при работе резервного канала управления.
Замыкатели 13 и 14 подключены к резервному источнику электропитания 15 при помощи переключателя 21: в его положении 22 резервный канал включен, основные каналы блокированы, а в положении 23 - резервный канал отключен, блокировка основных каналов снята (источник 15 подключен к входу сброса запоминающего блока 18).
Привод снабжен каналом защиты от обрыва цепей задатчика 6 и датчика обратной связи 7.
Канал защиты содержит логический элемент И 24, подключенный входами к выходам задатчика 6 и датчика 7, а выходами - к входам блокировочных элементов 19 и 20 и к инверсному входу записи запоминающего блока 25.
Выход блока 25 подключен к сигнализации 26, а вход сброса - через дискретный орган 27 отмены команды к резервному источнику 15.
В гидравлическом канале между механизмом 4 и распределителем 5 включен гидравлический дроссель 28, регулирующий скорость отработки механизма 4.
Электрогидравлический распределитель 16 резервного канала подключен к механизму 4 параллельно распределителю 5 между дросселем 28 и механизмом 4.
В гидравлических каналах между распределителем 16 и механизмом 4 включены гидравлический дроссель 29 с включенным параллельно ему невозвратным клапаном 30 и гидравлический дроссель 31 с аналогично включенным клапаном 32, для регулировки скорости отработки механизма 4 при работе резервного канала управления.
Рычаг 33 датчика обратной связи 7, установленного вне двигателя, кинематически связан с выходом механизма 4 гибкой кинематической связью, выполненной в виде троса 34, пропущенного через направляющий кожух 35 (например, типа «троса Боудена»). Концы кожуха 35 закреплены: один - на двигателе, в районе механизма 4, а другой - вне двигателя, в районе установки датчика 7.
Для повышения точности отработки основных каналов управления каждый основной канал в блоке 8 снабжен автоматическим корректором отработки исполнительного механизма 4.
Корректор канала на увеличение частоты вращения содержит последовательно соединенные запоминающий блок 36, логический элемент И 37 и элемент задержки времени 38.
Вход записи блока 36 и инверсный вход элемента И 37 подключены к выходу элемента сравнения 9, выход блока 36 - к прямому входу И 37, выход И 37 - к входу элемента 38 и через элемент ИЛИ 11 и блокировочный элемент И 19 - к электромагниту распределителя 5 на увеличение частоты вращения двигателя.
Выход элемента задержки времени 38 подключен к входу сброса запоминающего блока 36.
Корректор канала на уменьшение частоты вращения содержит последовательно соединенные запоминающий блок 39, логический элемент И 40 и элемент задержки времени 41.
Элементы этого корректора подключены к элементу сравнения 10 и через ИЛИ 12 и И 20 - к электромагниту распределителя 5 на уменьшение частоты вращения двигателя.
Привод работает следующим образом.
При управлении двигателем 1 при помощи основного (следящего) канала управления сигналы от задатчика 6 и датчика обратной связи 7 поступают на входы логического блока 8 и элемента И 24 канала защиты.
При нормальной работе следящего канала сигнал с выхода И 24 поступает на прямые входы блокировочный элементов И 19 и 20. При отсутствии на инверсных входах этих элементов сигнала с выхода запоминающего блока 18 резервного канала управления, с выхода элемента 19 или 20 поступает сигнал на соответствующий электромагнит распределителя 5. Распределитель 5 подает рабочую жидкость через дроссель 28 в соответствующую полость механизма 4, воздействующего на орган 3 управления регулятором 2 двигателя 1 и одновременно воздействующего при помощи гибкой кинематической обратной связи на рычаг 33 датчика обратной связи 7.
Гибкая кинематическая обратная связь состоит из троса 34, перемещающегося внутри гибкого кожуха 35 и повторяющего конфигурацию изгибов кожуха.
Трос 35 передает через рычаг 33 датчика обратной связи 7 перемещение исполнительного механизма 4, пока сигналы от задатчика 6 и датчика 7 на входах блока 8 не сравняются.
При выходе из строя следящего канала (обрыв цепи задатчика 6 или датчика 7) сигнал с выхода И 24 снимается, блокируя логические элементы И 19 и 20. На инверсном входе записи запоминающего блока 25 сигнал с выхода И 24 также снимается, блок 25 запоминает факт аварии и включает сигнализацию 26.
При необходимости продолжения управления двигателем оператор переводит переключатель 21 в положение 22 на управление двигателем 1 от резервного канала управления и производит управление при помощи кнопочных замыкателей 13 и 14.
При нажатии на замыкатель 13 или 14 сигнал с его выхода поступает на соответствующий электромагнит распределителя 16 (при нажатии на оба замыкателя одновременно они блокируют друг друга).
Распределитель 16 подает рабочую жидкость через дроссель 29 или 31 на механизм 4, воздействуя на орган 3 управления регулятором 2 частоты вращения двигателя. Другой дроссель 31 или 29 шунтируется невозвратным клапаном 32 или 30 соответственно.
Одновременно при нажатии любого из замыкателей 13 или 14 через элемент ИЛИ 17 подается сигнал на вход записи запоминающего блока 18, с выхода которого поступает сигнал на инверсные входы блокировочных элементов И 19 и 20, блокируя работу следящего канала.
Перевод запоминающего блока 18 в исходное состояние и разблокировка следящего канала осуществляется подачей сигнала на вход сброса запоминающего блока 18 от переключателя 21 в его положение 23 при отключении питания резервного канала управления.
После устранения неисправности следящего канала управления разблокировка элементов И 19 и 20 осуществляется подачей на вход сброса запоминающего блока 25 сигнала от источника 15 резервного электропитания дискретным органом 27 отмены команды.
Повышение точности отработки привода в режиме следящего управления достигается тем, что сигналы отработки запоминаются в логическом блоке 8 и обеспечивают работу автоматических корректоров в обоих основных каналах управления.
При отработке на понижение частоты вращения наличие сигнала на выходе элемента сравнения 10 запоминается в автоматическом корректоре блоком 39 и поступает на вход элемента И 40. Так как сигнал с выхода элемента сравнения 10 одновременно поступает на инверсный вход И 40 сигнал на выходе И 40 отсутствует.
После уравнивания на входах элемента 10 сигналов от задатчика 6 и датчика обратной связи 7 до верхней границы зоны нечувствительности, сигнал с выхода элемента 10 снимается, отработка исполнительного механизма 4 прекращается на верхней границе зоны нечувствительности.
Одновременно появляется сигнал на выходе И 40 корректора, который через ИЛИ 12 и И 20 включает механизм 4 повторно на время задержки, определяемое регулировкой элемента 41.
Это время обеспечивает перемещение механизма 4 на величину, меньшую зоны нечувствительности системы, например, на половину этой зоны, с учетом инерционных характеристик механизма 4.
После появления сигнала на выходе элемента 41 он поступает на вход сброса блока 39, сигнал с входа И 40 снимается, снимается сигнал с выхода ИЛИ 12 и механизм 4 останавливается.
Аналогично происходит отработка элементов 9, 11, 36, 37, 38 и 19 при повышении частоты вращения, но на нижней границе зоны нечувствительности.
Введение в каналы управления логического блока электрогидравлического привода для двигателя внутреннего сгорания автоматических корректоров отработки исполнительного механизма в пределах зоны нечувствительности системы значительно повышает точность отработки привода и позволяет обеспечить точное позиционирование в пространстве объекта, на котором установлен двигатель, и исключить при этом колебательный процесс управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД | 2003 |
|
RU2256106C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2254502C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД С НЕСКОЛЬКИМИ ПОСТАМИ УПРАВЛЕНИЯ | 2003 |
|
RU2256105C1 |
| Электрогидравлический дистанционный привод | 1975 |
|
SU557208A1 |
| ДИСТАНЦИОННЫЙ ПРИВОД УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2238880C1 |
| Дистанционный привод управления судовым двигателем | 1988 |
|
SU1539141A1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2007 |
|
RU2340489C1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2000 |
|
RU2184664C2 |
| Автоматическая дистанционная система управления для двигателя внутреннего сгорания | 1980 |
|
SU926341A1 |
| Система управления двигателем | 1987 |
|
SU1499316A1 |
Изобретение относится к области регулирования и управления двигателями внутреннего сгорания, в частности, содержащие средства управления с электрическим приводом. Привод содержит основные каналы управления, выполненные в виде логического блока, соединенного с основным электрогидравлическим распределителем, резервные каналы, при этом, по крайней мере, один из резервных каналов выполнен в виде кнопочных замыкателей, резервный источник электропитания, резервный электрогидравлический распределитель, логический элемент ИЛИ и запоминающий блок с блокировочными логическими элементами И. Привод снабжен каналом защиты от обрыва цепей задатчика и датчика обратной связи, содержащим последовательно соединенный логический элемент И и запоминающий блок. Ко входам элемента И канала защиты подключены параллельно выходы задатчика и датчика обратной связи. Выход элемента И подключен к прямым входам блокировочных элементов И основных каналов управления. Выход запоминающего блока подключен к аварийной сигнализации. Вход сброса запоминающего блока подключен к резервному источнику электропитания при помощи дискретного органа отмены команды. Гидравлический исполнительный механизм установлен непосредственно на двигателе и связан жесткой кинематической связью с органом управления частотой вращения двигателя, связан с электрическим датчиком обратной связи, установленным вне двигателя, гибкой кинематической обратной связью. Гибкая кинематическая обратная связь выполнена в виде троса, размещенного внутри гибкого направляющего кожуха, закрепленного своими концами на двигателе в месте установки исполнительного механизма и вне двигателя, в месте установки датчика обратной связи. Основные каналы управления в логическом блоке снабжены каждый автоматическим корректором отработки исполнительного механизма, содержащим последовательно соединенные запоминающий блок, логический элемент И и элемент задержки времени, при этом выход элемента сравнения в каждом канале подключен в корректоре к входу записи запоминающего блока и к инверсному входу элемента И, и параллельно с выходом элемента И корректора через элемент ИЛИ к входу соответствующего блокировочного элемента И, а выход элемента И корректора подключен в корректоре через элемент задержки времени к входу сброса запоминающего блока, причем величина задержки времени соответствует отработке исполнительного механизма на величину, меньшую величины зоны нечувствительности основного канала управления, и выполнена регулируемой. Изобретение позволяет повысить точность отработки электрогидравлического дистанционного привода и обеспечить точное позиционирование в пространстве объекта, на котором установлен двигатель внутреннего сгорания. 1 ил.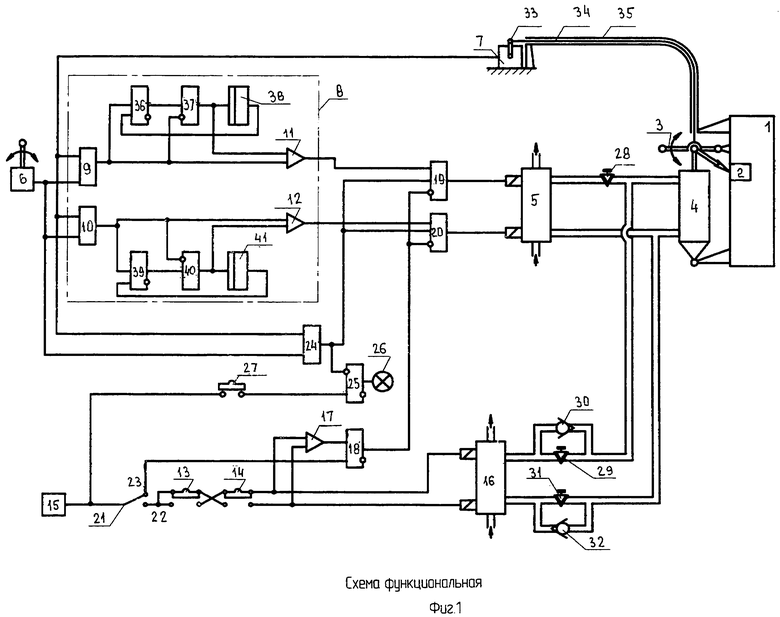
Электрогидравлический дистанционный привод для двигателя внутреннего сгорания, содержащий основные каналы управления, выполненные в виде логического блока, соединенного с основным электрогидравлическим распределителем, параллельно с которым подключены резервные каналы, при этом, по крайней мере, один из резервных каналов выполнен в виде кнопочных замыкателей, подключенных с одной стороны к резервному источнику электропитания, а с другой стороны - к резервному электрогидравлическому распределителю, и соединенных при помощи логического элемента ИЛИ и запоминающего блока с блокировочными логическими элементами И, включенными между логическим блоком и основным электрогидравлическим распределителем, и снабжен каналом защиты от обрыва цепей задатчика и датчика обратной связи, содержащим последовательно соединенный логический элемент И и запоминающий блок, причем ко входам элемента И канала защиты подключены параллельно выходы задатчика и датчика обратной связи, выход элемента И подключен к прямым входам блокировочных элементов И основных каналов управления, выход запоминающего блока подключен к аварийной сигнализации, а вход сброса запоминающего блока подключен к резервному источнику электропитания при помощи дискретного органа отмены команды, при этом гидравлический исполнительный механизм, установленный непосредственно на двигателе и связанный жесткой кинематической связью с органом управления частотой вращения двигателя, связан с электрическим датчиком обратной связи, установленным вне двигателя, гибкой кинематической обратной связью, выполненной в виде троса, размещенного внутри гибкого направляющего кожуха, закрепленного своими концами на двигателе в месте установки исполнительного механизма и вне двигателя в месте установки датчика обратной связи, отличающийся тем, что основные каналы управления в логическом блоке снабжены каждый автоматическим корректором отработки исполнительного механизма, содержащим последовательно соединенные запоминающий блок, логический элемент И и элемент задержки времени, при этом выход элемента сравнения в каждом канале подключен в корректоре к входу записи запоминающего блока и к инверсному входу элемента И, и параллельно с выходом элемента И корректора через элемент ИЛИ к входу соответствующего блокировочного элемента И, а выход элемента И корректора подключен в корректоре через элемент задержки времени к входу сброса запоминающего блока, причем величина задержки времени соответствует отработке исполнительного механизма на величину, меньшую величины зоны нечувствительности основного канала управления, и выполнена регулируемой.
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2254502C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД | 2003 |
|
RU2256106C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД С НЕСКОЛЬКИМИ ПОСТАМИ УПРАВЛЕНИЯ | 2003 |
|
RU2256105C1 |
| ЭЛЕКТРОМАГНИТНЫЙ СЕПАРАТОР | 2012 |
|
RU2516608C1 |
| Устройство для определения фазочастотных характеристик электроэнергетических объектов | 1987 |
|
SU1506380A1 |

