Область техники.
Изобретение относится к области систем определения параметров движения и углового положения летательных аппаратов (ЛА) по результатам измерений с помощью бортовых систем на перспективных гиперзвуковых летательных аппаратах (ГЛА), а именно, к способам определения углов атаки и скольжения при летных испытаниях гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД) на гиперзвуковом летательном аппарате. ГЛА разгоняется с помощью ракеты-носителя до скорости, соответствующей числу М≈4 при скоростном напоре q≈5000 кг/м2. Далее ГЛА в автономном режиме за счет тяги ГПВРД разгоняется до скорости, соответствующей числу М≈10. Для управления ГЛА с целью обеспечения требуемых условий работы ГПВРД и для определения силы тяги экспериментального двигателя необходимо определение с высокой точностью углов атаки и скольжения.
Уровень техники.
Углы атаки и скольжения являются важнейшими летно-техническими характеристиками, определяющими движение ГЛА и условия работы ГПВРД, а также важнейшими параметрами для построения алгоритма управления движением ГЛА. Рассматривается ГЛА, который на участке выведения с помощью другой двигательной установки разгоняется до скорости, соответствующей числу М≈4 при скоростном напоре q≈5000 кг/м2, и далее при постоянных значениях угла атаки и скоростного напора и нулевого угла скольжения разгоняется до числа М≈10. Серьезным препятствием, ограничивающим возможности использования известных методов определения углов атаки и скольжения, являются высокие требования к точности определения углов (до 0.2°), высокие тепловые и аэродинамические нагрузки на конструкцию ГЛА (температура на поверхности достигает t°≈1200°С и скоростной напор q≈5000 кг/м2), а также возможные большие ветровые возмущения. По сути, задача сводится к определению направления действия на ЛА максимального скоростного напора (давления). Известные в настоящее время методы определения углов не отвечают в полной мере поставленным требованиям. В частности, методы, построенные на использовании принципов бесплатформенной инерциальной навигации, базирующихся на измерениях перегрузок и угловых скоростей с помощью акселерометров и ДУСов, не обеспечивают без дополнительных коррекций требуемую точность при действии ветровых возмущений. Учет этих возмущений представляет одну из важных задач при разработке бесплатформенных инерциальных навигационных систем (БИНС) и использовании принципов инерциальной навигации при определении углов атаки и скольжения. Следует учитывать, что инерциальные системы являются достаточно сложными и дорогостоящими устройствами, и при проведении летных испытаний экспериментальных ГЛА использование их экономически не всегда целесообразно.
Известна комплексная информационная система, патент RU 2263280, G01C 23/00, 2004 г.
Это самолетная комплексная информационная система (КИС), включающая в себя датчик воздушной скорости (ДВС), датчик углов атаки и скольжения (ДУАС), датчик угловой ориентации (курсовертикаль), вычислительное устройство, в котором с целью уточнения углов атаки и скольжения предложена установка дополнительно датчика параметров движения (ДПД), который представляет собой устройство измерения путевой скорости и координат ЛА, дополнительно введен блок оценивания скорости ветра, блок прогноза скорости ветра и блоки обратного расчета и перепроецирования вектора скорости.
Однако такая система является сложным устройством инерциальной навигации, для обеспечения работы которого используется достаточно много систем измерений: радиотехническая система ближней навигации, доплеровского измерителя скорости и сноса, спутниковая навигационная система, измерителей параметров геофизических поверхностных и пространственных полей и др. Кроме того, такая система является достаточно дорогостоящим устройством.
Известен также «Способ определения скоростного напора набегающего потока на борту космического аппарата с системой силовых гироскопов», патент RU 2087390, B64G 1/28, 1997 г.
Однако такой способ требует организации мерных участков для проведения интегральной оценки момента силы давления, что непригодно при проведении летных испытаний ГЛА, траектории которых характеризуются большими скоростными напорами и высокочастотными переходными процессами в угловом движении.
Известно «Устройство для определения углов атаки (скольжения) летательного аппарата», патент RU 1800780, В64С 21/02, 1995 г. Это также самолетная система измерений базируется на датчиках флюгерного типа для измерения аэродинамических углов. В нем для уточнения углов атаки и скольжения введены датчик числа Маха, баровысотомер и блоки определения поправок фильтров.
Самолетные устройства измерений воздушных параметров не могут быть использованы вследствие высоких температур на поверхности ГЛА.
Наиболее близким техническим решением, принятым за прототип, является способ «Определение углов атаки и скольжения при помощи сферического приемника давления» (О.Л.Волошин, труды ЦАГИ, выпуск 2540, 1994 г.). В указанной работе предложены алгоритмы вычисления углов атаки и скольжения на основании аппроксимации эпюры давления на поверхности сферы степенными функциями. Алгоритмы предложены для определения углов атаки и скольжения по давлениям в дискретных точках на поверхности сферы, причем как при равномерном, так и неравномерном распределении точек на поверхности сферы. На поверхности сферы в двух взаимно перпендикулярных плоскостях oX1Y1 и oX1Z1 ГЛА располагают приемники датчиков воздушного давления, показания которых подаются в алгоритм обработки. По этим показаниям вычисляются углы атаки и скольжения.
Недостатком рассматриваемой системы является зависимость точности вычислений углов от возможных отказов датчиков, от углового расстояния между дренажными отверстиями. Кроме того, точность вычислений углов снижается вследствие скоса потока при быстром изменении угла атаки и вследствие запаздывания в измерительных трактах датчиков. Первый из этих недостатков является наиболее существенным, из-за которого снижается не только точность вычислений, но и надежность системы определения углов по измерениям воздушных параметров. Для устранения такого недостатка автор предлагает увеличить число датчиков.
Однако увеличение числа датчиков затруднительно выполнить на ГЛА, т.к. для каждого из датчиков необходимо термостойкое дренажное отверстие, чтобы не допустить его оплавления. В противном случае произойдет отказ датчика. Это приведет к снижению надежности системы. Помимо этого датчик необходимо защищать от чрезмерного нагрева, удаляя его от поверхности носка ГЛА. Это приводит к удлинению измерительного тракта датчика и, как следствие, к увеличению ошибок измерений.
С другой стороны, недостатком системы акселерометров и ДУСов (навигационной) является снижение точности вычисления углов из-за ухода гироскопов и невозможность определения с высокой точностью воздушных углов атаки и скольжения при действии ветровых возмущений. Однако, принимая во внимание малую продолжительность полета, ошибками из-за ухода гироскопов можно пренебречь.
Таким образом, рассмотренные системы порознь не удовлетворяют условиям точности и надежности работы на ГЛА.
Раскрытие изобретения.
Предлагаемое изобретение направлено на достижение технического результата, заключающегося в повышении точности и надежности определения углов атаки и скольжения.
Кроме того, предлагаемый способ позволяет избавиться от недостатков каждой из систем измерений в отдельности и использовать преимущества принципов их работы, что является более экономичным. Путем объединения указанных систем удается достаточно просто и с высокой точностью вычислить углы атаки и скольжения.
Для получения указанного технического результата в предлагаемом способе определения углов атаки и скольжения при летных испытаниях гиперзвукового летательного аппарата (ГЛА), включающем измерения давлений датчиками воздушного давления, установленными в дискретных точках на сферическом носке ГЛЛ с заданными шагами Δϕα и Δϕβ в продольной и боковой плоскостях, вычисление углов атаки  и скольжения
и скольжения  по формулам квадратичной аппроксимации показаний датчиков давления, проводят комплекс измерений давления набегающего потока с помощью датчиков давления, измерений линейных ускорений и угловых скоростей с помощью трехосевого датчика ТДУУС. Производят вычисления в бортовой цифровой вычислительной машине углов αn и βn по показаниям ТДУУС, используя известные кинематические соотношения:
по формулам квадратичной аппроксимации показаний датчиков давления, проводят комплекс измерений давления набегающего потока с помощью датчиков давления, измерений линейных ускорений и угловых скоростей с помощью трехосевого датчика ТДУУС. Производят вычисления в бортовой цифровой вычислительной машине углов αn и βn по показаниям ТДУУС, используя известные кинематические соотношения:
 ,
,
 ,
,
где VXu, VYu, VZu - проекции вектора относительной скорости, полученные в результате интегрирования уравнений акселерометров и угловых скоростей, на оси измерительной системы координат oXuYuZu.
Одновременно в БЦВМ вычисляют значения и по формулам квадратичной аппроксимации показаний каждой группы по три датчика давления из общего числа в каждой плоскости измерений. Число вычисленных значений углов равно числу сочетаний Сk 3, где
k - число дренажных отверстий в каждой плоскости измерений.
Из полученных величин отбраковывают минимальные и максимальные значения углов и  , находят требуемое значение каждого из углов как среднее арифметическое из оставшихся значений по формулам:
, находят требуемое значение каждого из углов как среднее арифметическое из оставшихся значений по формулам:

Определяют абсолютные значения разностей между расчетными значениями углов αn и βn, полученными по измерениям ТДУУС, и углов и , полученными по измерениям датчиков давления. Сравнивают абсолютные значения разностей с заранее заданными величинами Δα и Δβ, выбираемыми в пределах 0.5°...1°.
При этом, если абсолютное значение каждой из разностей больше соответствующей величины Δα и Δβ, что свидетельствует об отказе более одного датчика давления или выходу ГЛА на большие углы атаки или скольжения, близкие или выходящие за пределы диапазона углов дренажных отверстий в каждом из каналов, то БЦВМ фиксирует в качестве выходных сигналов αn и βn, вычисленных по измерениям ТДУУС. Если абсолютное значение каждой из разностей меньше или равно соответствующей величины Δα и Δβ, то БЦВМ фиксирует в качестве выходных сигналов  и
и  , вычисленных по измерениям датчиков, и передает для формирования сигналов управления ГЛА, а также в систему определения вектора силы тяги ГПВРД.
, вычисленных по измерениям датчиков, и передает для формирования сигналов управления ГЛА, а также в систему определения вектора силы тяги ГПВРД.
Кроме того, в плоскости oX1Y1 дренажные отверстия смещают вниз на величину расчетного балансировочного угла атаки, а плоскость расположения дренажных отверстий по углу скольжения поворачивают вниз относительно плоскости oX1Z1 на расчетный угол атаки. В итоге линия пересечения двух ортогональных плоскостей измерений направлена по оси, близкой к оси оХ скоростной системы координат, а дренажные отверстия на носке ГЛА в продольной и боковой плоскостях размещают в окрестности расчетных значений аэродинамических углов. За счет этого обработку результатов измерений производят практически в линейном диапазоне с малым шагом между дренажными отверстиями, что обеспечивает повышение точности вычисления углов.
Более того, количество дренажных отверстий не превышает четырех в каждой из ортогональных плоскостей, а дренажные отверстия выполняют термостойкими для предотвращения их оплавления.
Таким образом, при таком построении системы определения углов удается определить углы атаки и скольжения с точностью, соответствующей среднеквадратическим отклонениям и математическим ожиданиям соответственно σα=0.05°, σβ=0.05°; mα=0.01°, mβ=0.05° при действии различных внешних возмущений. При этом отпадает необходимость использования дорогостоящей бесплатформенной навигационной системы (БИНС), число дренажных отверстий не превышает 7 по двум каналам - углу атаки и углу скольжения.
Заявляемое решение дает возможность определить угол атаки и скольжения с высокой точностью и надежностью при действии как ветровых, так и других различных внешних возмущений, прежде всего, при испытании ГПВРД на ГЛА, определять углы атаки и скольжения на других типах летательных аппаратов, в особенности при больших скоростях полета, когда обычные самолетные схемы определения углов с такой точностью становятся практически непригодными.
Предлагаемое изобретение иллюстрируется чертежами, на которых изображены:
на фиг.1 показана заявляемая схема расположения дренажных отверстий на носке ГЛА (вид сбоку и вид спереди), где
1 - сечение носка ГЛА в плоскости oX1Y1 (дренажных отверстий по углу атаки);
2 - эпюра распределения давления;
3 - дренажное отверстие;
4 - плоскость oX1Z1 ГЛА;
5 - плоскость дренажных отверстий по углу скольжения.
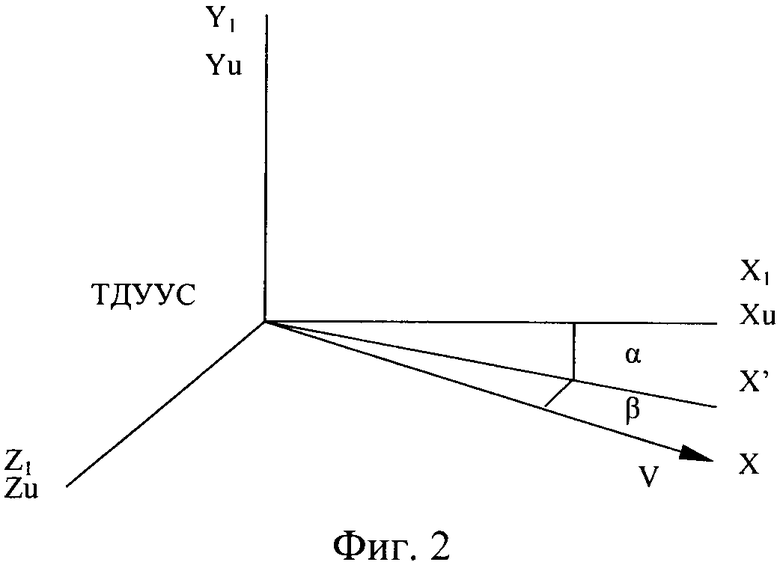
на фиг.2 - схема ориентации измерительных осей oXuYuZu акселерометров и ДУСов (датчик ТДУУС) в момент начальной выставки, вектора скорости V относительно связанных осей oX1Y1Z1 ГЛА для определения углов атаки α и скольжения β;
на фиг.3 - изменения параметров траектории по времени при номинальных условиях и нулевом угле скольжения:
Н - высота полета;
V - скорость;
q - скоростной напор;
α - угол атаки;
γс - скоростной угол крена ГЛА.
на фиг.4 - среднеквадратические отклонения σα, σβ и математические ожидания mα, mβ по углам атаки и скольжения, полученные в результате статистического моделирования при действии внешних возмущений.
Предлагаемый способ осуществляют в следующей последовательности.
Способ определения углов атаки и скольжения при летных испытаниях гиперзвукового летательного аппарата (ГЛА) включает измерения давлений датчиками воздушного давления, установленными в дискретных точках в дренажных отверстиях на сферическом носке ГЛА с заданными шагами Δϕα и Δϕβ в продольной и боковой плоскостях (схема расположения дренажных отверстий на носке ГЛА, вид сбоку и вид спереди, показана на фиг.1), измерения перегрузок и угловых скоростей с помощью датчика ТДУУС (схема ориентации измерительных осей oXuYuZu датчика ТДУУС относительно связанных осей oX1Y1Z1 в момент начальной выставки показана на фиг.2).
На носке 1 ГЛА в дискретных точках изготавливают термостойкие дренажные отверстия 3, количество дренажных отверстий не превышает четырех в каждой из ортогональных плоскостей 1 и 5, а дренажные отверстия выполняют термостойкими для предотвращения их оплавления (см. фиг.1). Такое количество дренажных отверстий достаточно, чтобы обеспечить надежную работу системы при отказе не более одного датчика.
Отверстия располагают с заданными шагами Δϕα и Δϕβ в продольной и боковой плоскостях; в плоскости oX1Yi дренажные отверстия смещают вниз на величину расчетного балансировочного угла атаки, а плоскость расположения дренажных отверстий по углу скольжения 5 поворачивают вниз относительно плоскости oX1Z1 на расчетный угол атаки.
В итоге, линия пересечения двух ортогональных плоскостей измерений направлена по оси, близкой к оси оХ скоростной системы координат (см. фиг.2), а дренажные отверстия на носке ГЛА в продольной и боковой плоскостях размещают в окрестности расчетных значений аэродинамических углов в секторах, охватывающих возможные допустимые отклонения углов атаки и скольжения относительно их расчетных номинальных значений на экспериментальном участке. За счет этого обработку результатов измерений производят практически в линейном диапазоне с малым шагом между дренажными отверстиями, что обеспечивает повышение точности вычисления углов.
По всем дренажным отверстиям устанавливают приемники датчиков воздушного давления. Датчики устанавливают на внутренней поверхности носка.
В центре масс ГЛА устанавливают датчик ТДУУС, измерительные оси его oXuYuZu ориентированы по направлениям связанных осей oX1Y1Z1 ГЛА (см. фиг.2).
В полете проводят комплекс измерений давления набегающего потока с помощью датчиков давления, линейных ускорений и угловых скоростей с помощью трехосевого датчика ТДУУС; результаты измерений передают в бортовую цифровую вычислительную машину (БЦВМ).
Проводят в бортовой цифровой вычислительной машине вычисления углов αn и βn по показаниям ТДУУС, используя известные кинематические соотношения:
,
,
где VXu, VYu, VZu - проекции вектора относительной скорости, полученные в результате интегрирования уравнений акселерометров и угловых скоростей на оси измерительной системы координат oXuYuZu.
Одновременно в БЦВМ вычисляют значения и по формулам квадратичной аппроксимации показаний каждой группы по три датчика давления из общего числа в каждой плоскости измерений, число вычисленных значений углов равно числу сочетаний Ck 3, где
k - число дренажных отверстий в каждой плоскости измерений.
Из полученных величин отбраковывают минимальные и максимальные значения углов и , находят требуемое значение каждого из углов как среднее арифметическое из оставшихся значений по формулам:
определяют абсолютные значения разностей между расчетными значениями углов αn и βn, полученными по измерениям ТДУУС, и углов и , полученными по измерениям датчиков давления, сравнивают абсолютные значения разностей с заранее заданными величинами Δα и Δβ, выбираемыми в пределах 0.5°...1°. При этом, если абсолютное значение каждой из разностей больше соответствующей величины Δα или Δβ, что свидетельствует об отказе более одного датчика давления или выходу ГЛА на большие углы атаки или скольжения, близкие к предельным значениям диапазона углов дренажных отверстий в каждом из каналов, то БЦВМ передает в качестве выходных сигналов αn и βn, вычисленных по измерениям ТДУУС. Если абсолютное значение каждой из разностей меньше или равно соответствующей величины Δα или Δβ, то БЦВМ передает в качестве выходных сигналов и , вычисленных по измерениям датчиков давления. Вычисленные значения используются далее в системе управления ГЛА и для определения силы тяги экспериментального ГПВРД.
Пример.
Для проверки предложенного способа определения углов атаки и скольжения при летных испытаниях гиперзвукового летательного аппарата проведено математическое моделирование траектории полета ГЛА при действии различных случайных внешних возмущений: ошибок по высоте и скорости, угловым скоростям и перегрузкам, по скоростному напору и аэродинамическим коэффициентам, а также при действии ветровых возмущений. На фиг.3 показаны: изменения параметров траектории по времени при номинальных условиях и нулевом угле скольжения, который необходимо выдерживать согласно требованиям проведения эксперимента; начальные условия: Н0=11300 м, V0=227 м/с, траекторный угол Θ0=0°, при соответствующих весовых и аэродинамических характеристиках ГЛА, а также программных значениях угла атаки и скоростного угла крена.
После проведенного статистического моделирования получены значения математического ожидания и среднеквадратического отклонения по углам атаки и скольжения (см. фиг.4), которые служат для оценки точности определения углов.
На фиг.4 показаны среднеквадратические отклонения σα, σβ и математические ожидания mα, mβ по углам атаки и скольжения, полученные в результате статистического моделирования при действии различных случайных внешних возмущений. Представленные результаты характеризуют точность вычислений углов, которая находится на уровне, полученном, в частности, при испытании ГЛА Х-43А; (точность определения углов по величине 3σ составляет ≈0.2°; IAC-05-D2.6.01; X-43A HIPERSONIC VEHICLE TECHNOLOGY DEVELOPMENT).
Изобретение относится к технике определения параметров движения и углового положения летательных аппаратов. При летных испытаниях гиперзвукового летательного аппарата (ГЛА) измеряют давление датчиками воздушного давления, установленными в дискретных точках на сферическом носке ГЛА с заданными шагами в продольной и боковой плоскостях. Проводят комплекс измерений давления набегающего потока с помощью датчиков давления, а линейных ускорений и угловых скоростей - с помощью трехосевого датчика линейных ускорений и угловых скоростей (ТДУУС). Производят вычисления в БЦВМ углов атаки и скольжения по показаниям ТДУУС, используя известные кинематические соотношения. Одновременно в БЦВМ вычисляют значения углов атаки и скольжения по формулам квадратичной аппроксимации показаний каждой группы по три датчика давления из общего числа в каждой плоскости измерений. Из полученных величин отбраковывают минимальные и максимальные значения углов, находят требуемое значение каждого из углов как среднее арифметическое из оставшихся значений. Определяют абсолютные значения разностей между расчетными значениями углов, полученными по измерениям ТДУУС, и значениями углов, полученными по измерениям датчиков давления. Сравнивают абсолютные значения разностей с заранее заданными величинами. В зависимости от результатов сравнения фиксируют в качестве выходных сигналов значения углов, вычисленные по измерениям ТДУУС или по измерениям датчиков, и передают их для формирования сигналов управления ГЛА и для определения вектора силы тяги двигателя. Обработку результатов измерений производят практически в линейном диапазоне с малым шагом между дренажными отверстиями. Изобретение обеспечивает повышенную точность определения углов атаки и скольжения. 2 з.п. ф-лы, 4 ил.
 и скольжения
и скольжения  по формулам квадратичной аппроксимации показаний датчиков давления, отличающийся тем, что проводят комплекс измерений давления набегающего потока с помощью датчиков давления, линейных ускорений и угловых скоростей - с помощью трехосевого датчика линейных ускорений и угловых скоростей (ТДУУС), вычислений в бортовой цифровой вычислительной машине (БЦВМ) углов αn и βn по показаниям ТДУУС, используя известные кинематические соотношения
по формулам квадратичной аппроксимации показаний датчиков давления, отличающийся тем, что проводят комплекс измерений давления набегающего потока с помощью датчиков давления, линейных ускорений и угловых скоростей - с помощью трехосевого датчика линейных ускорений и угловых скоростей (ТДУУС), вычислений в бортовой цифровой вычислительной машине (БЦВМ) углов αn и βn по показаниям ТДУУС, используя известные кинематические соотношения
 ,
,
 ,
,
где VXu, VYu, VZu - проекции вектора относительной скорости, полученные в результате интегрирования уравнений акселерометров и угловых скоростей, на оси измерительной системы координат oXuYuZu,
одновременно в БЦВМ вычисляют значения и по формулам квадратичной аппроксимации показаний каждой группы по три датчика давления из общего числа в каждой плоскости измерений, причем число вычисленных значений углов принимают равным числу сочетаний Ck 3, где k - число дренажных отверстий в каждой плоскости измерений, из полученных величин отбраковывают минимальные и максимальные значения углов и , находят требуемое значение каждого из углов как среднее арифметическое из оставшихся значений по формулам
 ;
;  ,
,
определяют абсолютные значения разностей между расчетными значениями углов αn и βn, полученными по измерениям трехосевого датчика линейных ускорений и угловых скоростей, и значениями углов и , полученными по измерениям датчиков давления, сравнивают абсолютные значения разностей с заранее заданными величинами Δα и Δβ, выбираемыми в пределах 0,5...1°, при этом, если абсолютное значение каждой из разностей больше соответствующей величины Δα или Δβ, что свидетельствует об отказе более одного датчика давления или выходу ГЛА на большие углы атаки или скольжения, близкие к предельным значениям диапазона углов дренажных отверстий в каждом из каналов, то в БЦВМ фиксируют в качестве выходных сигналов значения αn и βn, вычисленные по измерениям ТДУУС, если абсолютное значение каждой из разностей меньше или равно соответствующей величины Δα или Δβ, то в БЦВМ фиксируют в качестве выходных сигналов значения  и
и  , вычисленные по измерениям датчиков давления, и выбранные значения сигналов передают в систему управления ГЛА, а также для вычисления вектора силы тяги экспериментального гиперзвукового прямоточного воздушно-реактивного двигателя.
, вычисленные по измерениям датчиков давления, и выбранные значения сигналов передают в систему управления ГЛА, а также для вычисления вектора силы тяги экспериментального гиперзвукового прямоточного воздушно-реактивного двигателя.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАБЕГАЮЩЕГО ПОТОКА ЛЕТАТЕЛЬНОГО АППАРАТА В ПОЛЕТЕ НА РЕЖИМАХ ПЛАНИРОВАНИЯ С ГИПЕРЗВУКОВЫМИ ИЛИ ДОЗВУКОВЫМИ СКОРОСТЯМИ ДВИЖЕНИЯ | 1998 |
|
RU2135974C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2195415C1 |
| Устройство для удаления шелухи из заторов в спиртовом производстве | 1935 |
|
SU46860A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ АТАКИ (СКОЛЬЖЕНИЯ) ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1800788A1 |

