Изобретение относится к машине для выпрямления длинных металлических изделий, таких как балки или рельсы.
Выравнивающие устройства, известные как выравниватели или правильные машины, используются для устранения дефектов плоскостности в длинных изделиях после горячей или холодной прокатки. После горячей прокатки, фаз охлаждения и кондиционирования, прокатанные изделия могут иметь дефекты плоскостности, изгиба шейки или прямоугольности. Эти геометрические дефекты отрицательно влияют на внешний вид прокатанных изделий.
Выравниватели с множеством роликов, расположенных с перекрытием с образованием волнообразного пути прохождения для длинного изделия, которое затем подвергается действиям изгиба в попеременных направлениях, используются для выравнивания таких прокатанных длинных металлических изделий.
Приводная система с двигателем обеспечивает возможность приведения роликов во вращение и продвижения вперед с заданной скоростью за счет трения длинного металлического изделия.
Для компенсации изгиба валов, где установлены ролики, вызванного напряжением отделения при прохождении полосы, изобретены различные системы.
Например, в документе US 5327760 раскрыт вариант выполнения правильной машины, в котором компенсационный поворот вала роликов реализован посредством использования контакта между плоскими и выпуклыми поверхностями 20 и 21. Пересечение между этими двумя поверхностями является линией, и вся нагрузка противодействия изгибу при повороте распределяется по этой контактной линии. Естественно, что это приводит к повышенному износу механических частей и к частой замене этих изношенных частей, что связано со снижением производительности, поскольку правильная машина не может использоваться во время ремонта.
Кроме того, для обеспечения поворота, согласно этому документу, необходим значительный зазор между двумя контактными поверхностями. В результате, имеется неопределенность относительно точного положения точки поворота и усложняется управление этим поворотом, потому что при подаче команды в цилиндр, вызывающий поворот, не может быть точно предсказан центр поворота. Это может приводить к двум различным центрам поворота для одной и той же точки установки или команды. Таким образом, это решение приводит к проблеме повторяемости, которая ведет к неопределенности, поскольку невозможно точное предсказание положения центра поворота и поэтому почти невозможно управление исполнительными механизмами поворота.
Кроме того, в решении, раскрытом в документе US 5327760, поворот реализуется в части без опоры. Поэтому увеличивается напряжение выпрямления в подшипниках, вследствие указанного выше зазора и вследствие небольшой контактной поверхности.
Целью данного изобретения является решение указанных выше проблем.
Цель достигается с помощью правильной машины, содержащей раму, на которую опираются корпуса, при этом в каждом корпусе расположен роликовый вал, установленный с возможностью вращения вокруг своей оси, при этом правильная машина дополнительно содержит:
- по меньшей мере один первый узел, содержащий первую направляющую, задающую первую выпуклую поверхность, и первый соответствующий направляемый элемент, задающий первую вогнутую поверхность, при этом указанные первые поверхности находятся в контакте друг с другом по первой контактной поверхности;
- по меньшей мере один второй узел, содержащий вторую направляющую, задающую вторую выпуклую поверхность, и второй соответствующий направляемый элемент (72), задающий вторую вогнутую поверхность, при этом вторые поверхности находятся в контакте друг с другом по второй контактной поверхности (S2),
- средства для поворота по меньшей мере одного корпуса (22, 26, 28, 38, 90, 92, 98) роликового вала, при этом поворот направляется с помощью узлов вокруг виртуальной оси (Р), поперечной оси Х роликового вала, с целью компенсации изгиба за счет выпрямления изделия.
Согласно другим признакам, взятым по отдельности или в комбинации друг с другом:
- правильная машина дополнительно содержит:
по меньшей мере один третий узел, содержащий третью направляющую, задающую третью выпуклую поверхность, и третий соответствующий направляемый элемент, задающий третью вогнутую поверхность, при этом указанные третьи поверхности находятся в контакте друг с другом по третьей контактной поверхности,
по меньшей мере один четвертый узел, содержащий четвертую направляющую, задающую четвертую выпуклую поверхность, и четвертый соответствующий направляемый элемент, задающий четвертую вогнутую поверхность, при этом указанные четвертые поверхности находятся в контакте друг с другом по четвертой контактной поверхности;
при этом поворот направляется с помощью третьего и четвертого узлов вокруг виртуальной оси, поперечной оси роликового вала, с целью компенсации изгиба за счет выпрямления изделия,
- узлы выполнены и расположены так, что в продольном сечении роликового вала линия контакта каждого узла является, соответственно, частью первой и второй виртуальной окружности, при этом первая и вторая виртуальные окружности имеют различные радиусы и имеют один и тот же виртуальный центр, при этом корпус роликового вала установлен с возможностью поворота вокруг указанного центра, с целью коррекции изгиба, вызванного подлежащим выпрямлению изделием,
- направляющие неподвижно закреплены на раме правильной машины,
- направляемые элементы неподвижно соединены с одним из корпусов роликового вала и поворачиваются с корпусом роликового вала во время противоизгибного поворота,
- каждая направляющая соединена с соответствующим направляемым элементом с помощью пружинных винтов, расположенных в выемках, образованных в каждой направляющей и в каждом направляемом элементе, при этом пружинные винты обеспечивают возможность поворота направляемого элемента относительно направляющей во время противоизгибного поворота корпуса роликового вала,
- каждая выемка каждого направляемого элемента, в которой размещен пружинный винт, имеет диаметр, больший диаметра пружинного винта, так что существует зазор между пружинным винтом и стенкой выемки направляемого элемента, в то время как при фиксирующем ввинчивании пружинного винта в выемку соответствующей направляющей, зазор обеспечивает возможность поворота каждого направляемого элемента относительно выпуклой направляющей во время противоизгибного поворота корпуса роликового вала,
- средства для поворота корпуса роликового вала задают первую контактную поверхность между выпуклой и вогнутой поверхностью, и при этом в продольном сечении корпуса роликового вала контактная поверхность является частью контактной линии виртуальной окружности, центр которой также находится в точке Р,
- средство для поворота корпуса роликового вала содержит вторую контактную поверхность между выпуклой и вогнутой поверхностью,
- средства для поворота корпуса роликового вала содержат:
первый винтовой поршень с оконечностью, задающей вогнутую поверхность,
первый элемент скольжения, содержащий выпуклую поверхность, дополняющую и взаимодействующую с вогнутой поверхностью первого винтового поршня,
второй винтовой поршень с оконечностью, задающей вогнутую поверхность,
второй элемент скольжения, содержащий выпуклую поверхность, дополняющую и взаимодействующую с вогнутой поверхностью второго винтового поршня,
при этом каждый винтовой поршень расположен и удерживается в проходе, образованном в раме правильной машины,
- средства для смещения корпуса роликового вала дополнительно содержат по меньшей мере два поводковых пальца, при этом каждый поводковый палец взаимодействует с винтовым поршнем для возвратно-поступательного движения каждого винтового поршня, и каждый поводковый палец имеет наружную резьбовую часть,
- средства для смещения корпуса роликового вала дополнительно содержат по меньшей мере два соосных приводных вала, при этом каждый вал находится в зацеплении с наружной резьбовой частью поводкового пальца для поворота каждого винтового поршня,
- каждый приводной вал имеет редукторную оконечность, и при этом редукторная соединительная система расположена между двумя приводными валами, при этом редукторная соединительная система установлена с возможностью перемещения между
первым положением, в котором лишь один приводной вал вращается с помощью приводного электродвигателя, при этом это положение приводит к повороту корпуса роликового вала; и
вторым положением, в котором оба приводных вала вращаются с помощью приводного электродвигателя, что приводит к возвратно-поступательному движению корпуса 12 роликового вала,
- средства для перемещения корпуса роликового вала дополнительно содержат вилку сдвига, приводимую в движение цилиндром, при этом указанная вилка сдвига перемещает редукторную соединительную систему между первым и вторым положением и наоборот,
- правильная машина содержит по меньшей мере два плеча, при этом каждое плечо задает выемку, в каждой выемке размещены винтовой поршень и элемент скольжения.
Другие преимущества данного изобретения следуют из приведенного ниже, не имеющего ограничительного характера описания со ссылками на прилагаемые чертежи, на которых изображено:
фиг. 1 – продольный разрез роликового вала правильной машины, согласно изобретению;
фиг. 2 – вращающаяся приводная система, согласно изобретению, из фиг. 1, в увеличенном масштабе;
фиг. 3а – роликовый вал и направляющие поворота из фиг. 1, в увеличенном масштабе;
фиг. 3b – направляющие поворота из фиг. 1, в увеличенном масштабе;
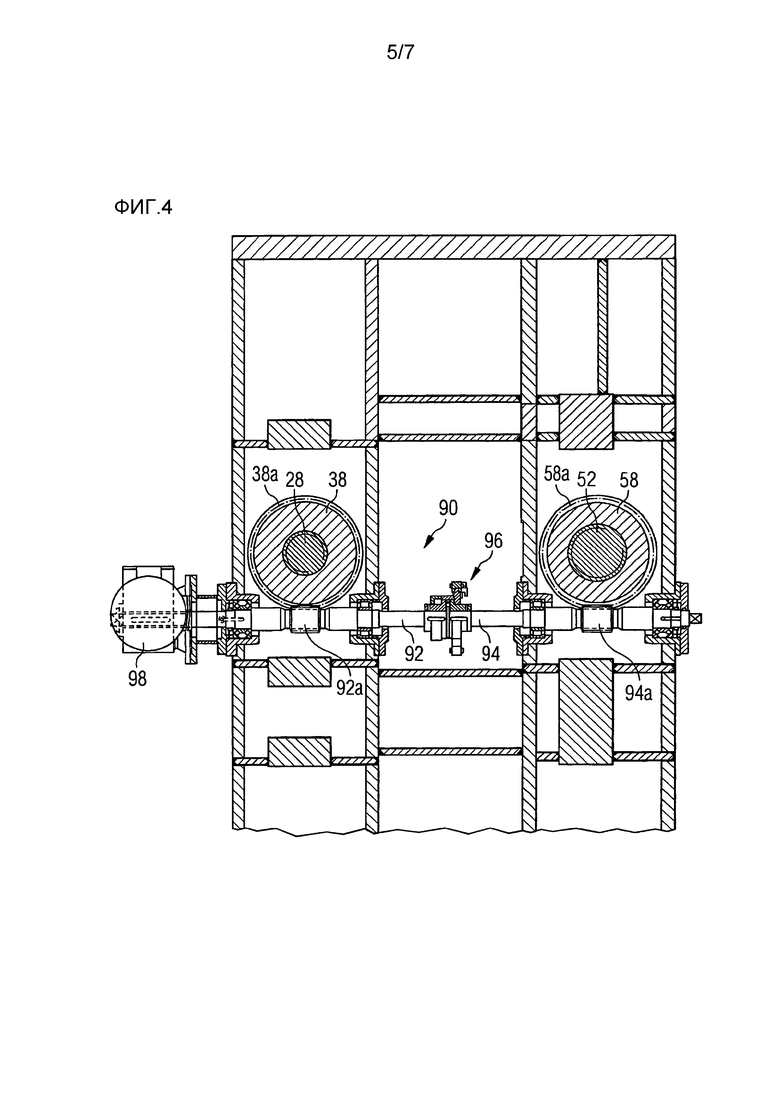
фиг. 4 – горизонтальный разрез приводной системы из фиг. 1, используемой для вращения роликового вала, согласно изобретению;
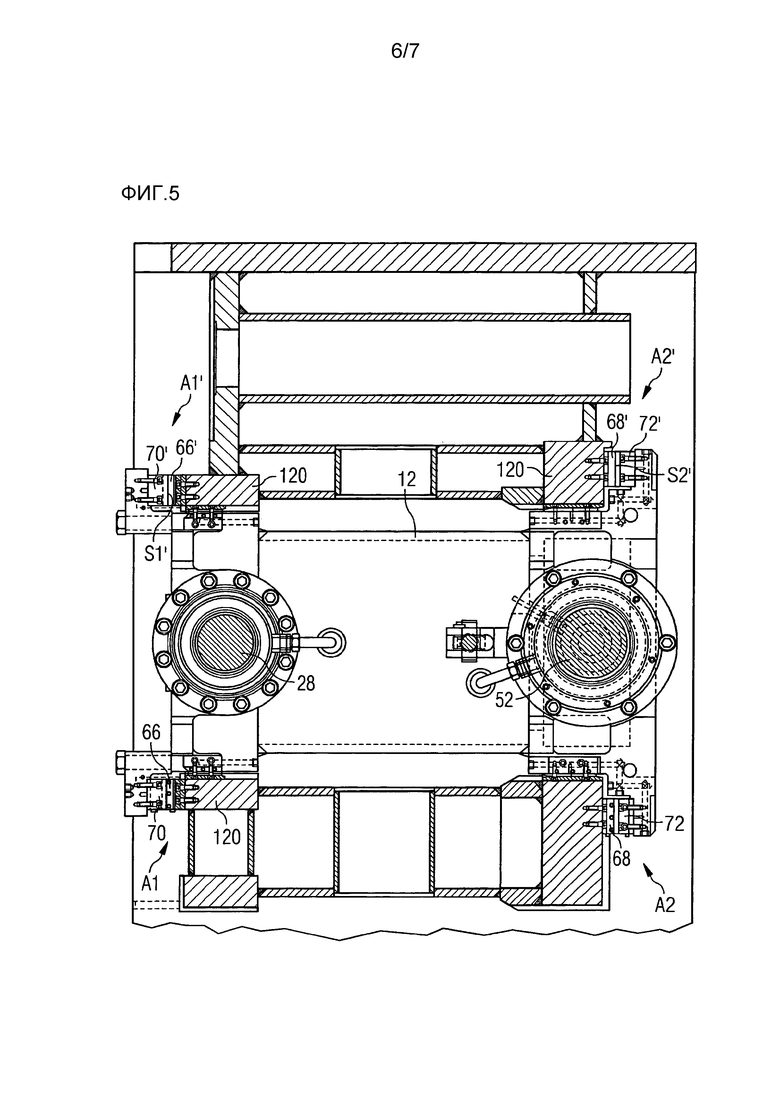
фиг. 5 – фиг. 1 на виде сверху;
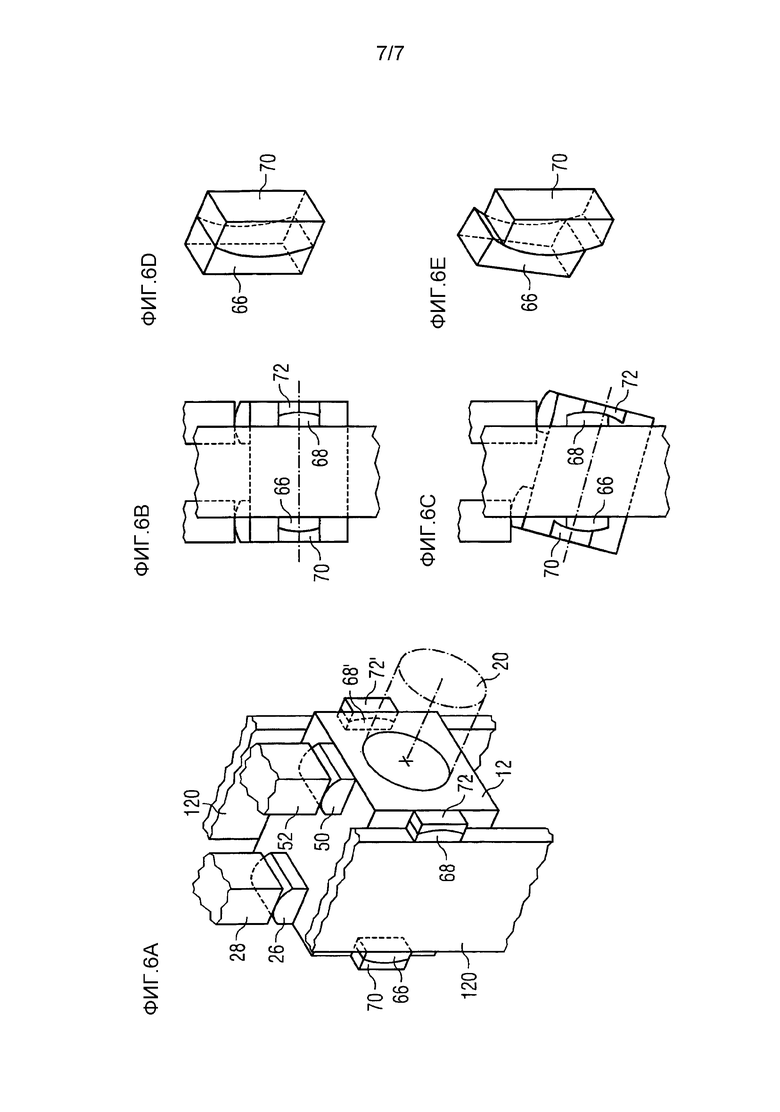
фиг. 6а – 6е - правильная машина, согласно изобретению.
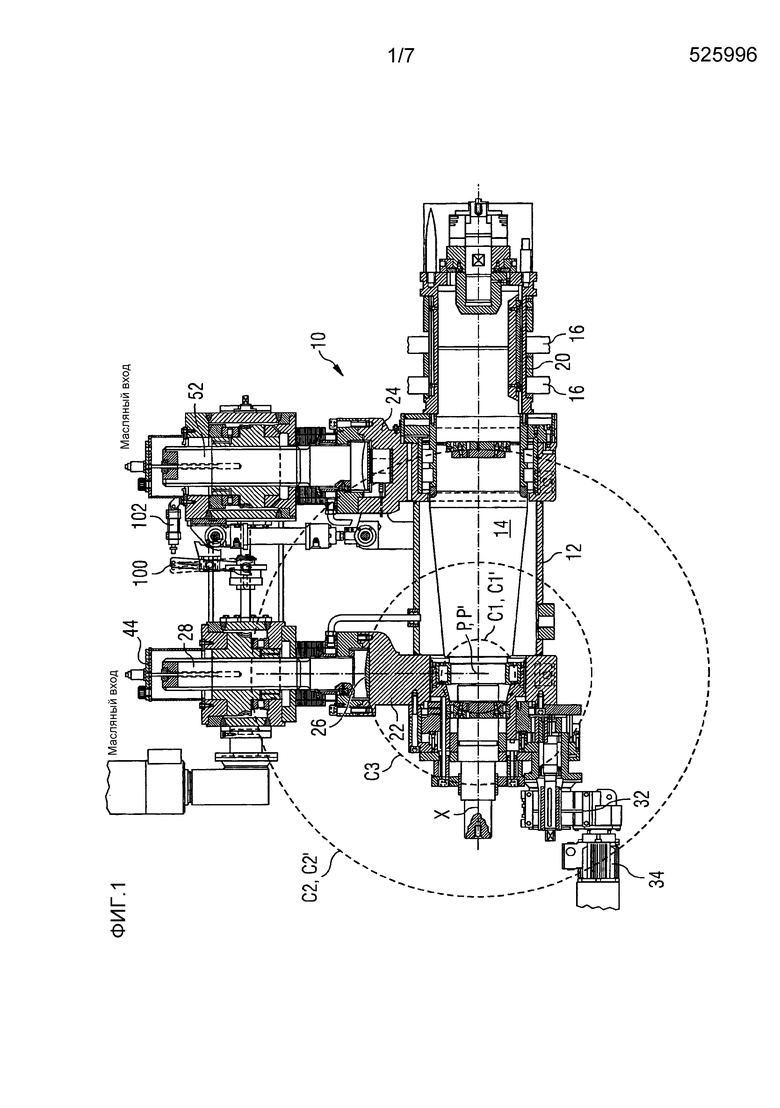
На фиг. 1 частично показан корпус 12 правильной машины 10. Роликовый вал 14 расположен в корпусе 10 и может вращаться вокруг своей продольной оси Х, благодаря нескольким подшипникам, расположенным между роликовым валом и корпусом 12. Роликовый вал имеет на одном из своих концов правильный ролик 20, содержащий два правильных диска 16 и 18. Прокатные правильные ролики 20 опираются консольно снаружи корпуса 12. Правильный ролик 20 предназначен для воздействия на изделие, подлежащее выпрямлению. Предусмотрены электродвигатель 34 и редукторный узел 32 для приведения во вращение роликового вала 14.
Понятно, что хотя на фиг. 1 показан лишь один роликовый вал 14, правильная машина, согласно изобретению, содержит множество роликовых валов и роликов, задающих путь прохождения изделия, подлежащего выпрямлению.
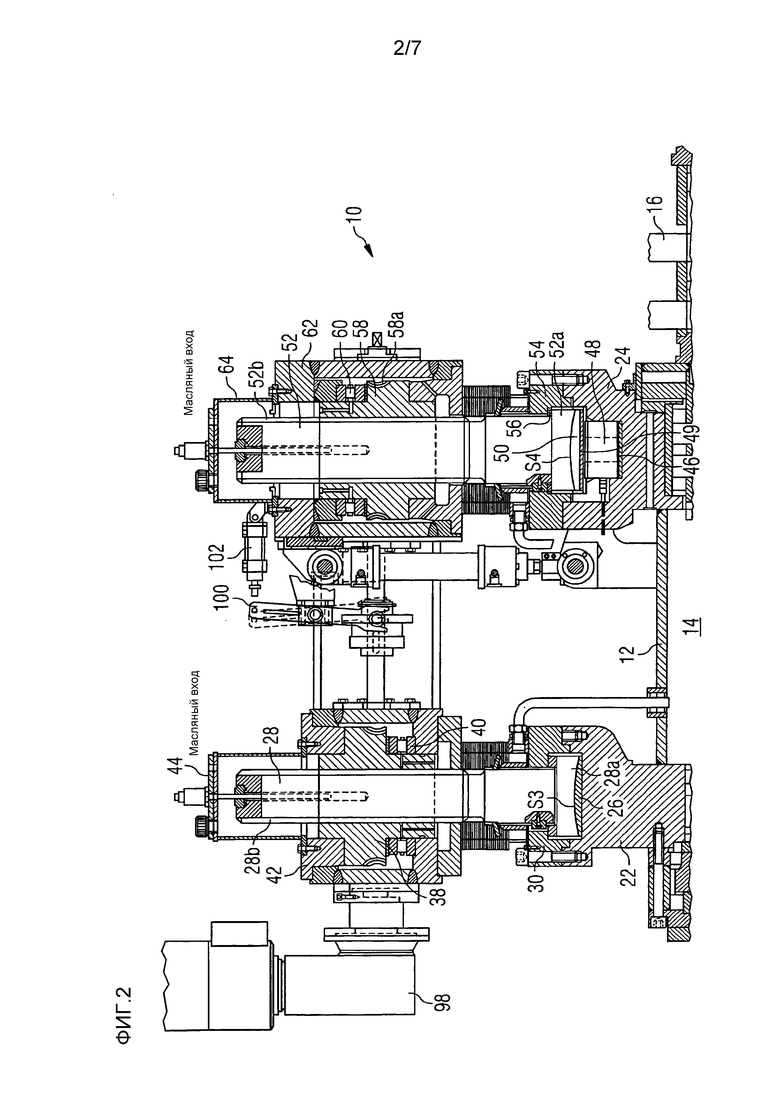
Согласно изобретению, и как показано лучше всего на фиг. 2, корпус дополнительно содержит два опорных плеча 22 и 24, при этом левое и правое плечо, как показано на фиг. 1, проходят поперек оси роликового вала. В показанном на фиг. 1 варианте выполнения, два плеча 22 и 24 проходят вверх. Два плеча 22 и 24 расположены на расстоянии друг от друга в горизонтальном направлении.
Левое (или первое) плечо 22 задает выемку, в которой размещены выпуклый элемент 26 скольжения и нижний конец 28е винтового поршня 28. Элемент 26 скольжения имеет выпуклую поверхность и плоскую поверхность. Плоская поверхность направлена к левому плечу правильной машины и лежит на нем, в то время как выпуклая поверхность элемента 26 скольжения направлена к концу 28е винтового поршня.
Конец 28е винтового поршня соединен с левым плечом с помощью кольцевого фланца 30, имеющего U-образную форму. Упорное кольцо 32 расположено между концом 28е винтового поршня и фланцем 30. Конец 28е винтового поршня имеет цилиндрическую поверхность, задающую вогнутую оконечность, которая имеет форму, дополняющую форму выпуклого элемента 26 скольжения. Этот нижний конец 28е винтового поршня имеет диаметр, больший диаметра тела винтового поршня 28. За счет этого образуется буртик, в который упирается упорное кольцо 32. Следует отметить, что в поперечном разрезе, показанном на фиг. 2, контактная поверхность S3 выпуклого элемента 26 скольжения и вогнутый конец 28е винтового поршня является линией, представляющей часть виртуальной окружности С3. Как будет пояснено ниже, центр окружности С3 совпадает с противоизгибным центром поворота роликового вала. Другими словами, горизонтальная поперечная противоизгибная ось проходит через центр окружности С3.
Тело левого винтового поршня 28 имеет резьбовую часть 28b, взаимодействующую с поводковым пальцем 38. Поворот поводкового пальца 38 вызывает возвратно-поступательное движение винтового поршня 28. Поводковый палец 38 имеет форму поперечного сечения и лежит на горизонтальном роликовом подшипнике 40, обеспечивающем возможность его поворота вокруг оси винтового поршня 28. Поводковый палец 38 содержит также наружную резьбу для его взаимодействия с червяком, как будет пояснено ниже. Поводковый палец 38 удерживается с помощью второго фланца 42. Часть винтового поршня проходит вверх за второй фланец 42 и закрыта колпачком 44. Колпачок образует масляный вход для смазки узла.
Левый винтовой поршень 28 предназначен для толкания элемента 32 скольжения, который в свою очередь толкает корпус 12 роликового вала 14 правильной машины 10, вызывая коррекционный изгиб роликового вала.
Правое (или второе) опорное плечо 24 также задает выемку, в которой размещена распорка 46, на которой лежит датчик 48 нагрузки. Распорка служит для коррекции плоскостности нижней поверхности выемки, которая может оказывать влияние на измерение нагрузки.
В выемке размещена также другая распорка 49, на которую опирается второй выпуклый элемент 50 скольжения и нижний конец 52а правого (или второго) выпуклого винтового поршня 52. Элемент 50 скольжения и нижний конец (или оконечность) 52а задает контактную поверхность S4. Конец правого винтового поршня 52 закреплен на правом плече с помощью резьбового кольцевого фланца 54. Упорное кольцо 56 расположено между концом (или нижней оконечностью) правого винтового поршня 24 и фланцем 54. Нижний конец 52а правого винтового поршня 52 имеет цилиндрическую форму с вогнутой оконечностью, которая имеет форму, дополняющую форму правого выпуклого элемента 50 скольжения. Этот нижний конец 52а правого винтового поршня 52 имеет диаметр, больший диаметра тела винтового поршня. Это образует буртик, где расположено упорное кольцо 56.
Тело правого винтового поршня 52 имеет наружную резьбовую часть 52b, взаимодействующую с правым поводковым пальцем 58. Поворот правого поводкового пальца 58 приводит к возвратно-поступательному движению винтового поршня 52. Поводковый палец имеет крестовидную форму и взаимодействует с верхним горизонтальным роликовым подшипником 60, обеспечивающим возможность его поворота вокруг оси правого винтового поршня 52. Правый поводковый палец 58 также содержит наружную резьбу 58а для его взаимодействия с червяком, как будет пояснено ниже. Правый поводковый палец 58 удерживается с помощью второго фланца 62. Часть правого винтового поршня 52 проходит вверх за второй фланец 62 и закрыт колпачком 64. Колпачок задает масляный вход для смазки узла.
Правый винтовой поршень 52 предназначен для толкания правого элемента 50 скольжения, который в свою очередь толкает корпус роликового вала правильной машины, вызывая коррекционный изгиб роликового вала, как поясняется более подробно ниже.
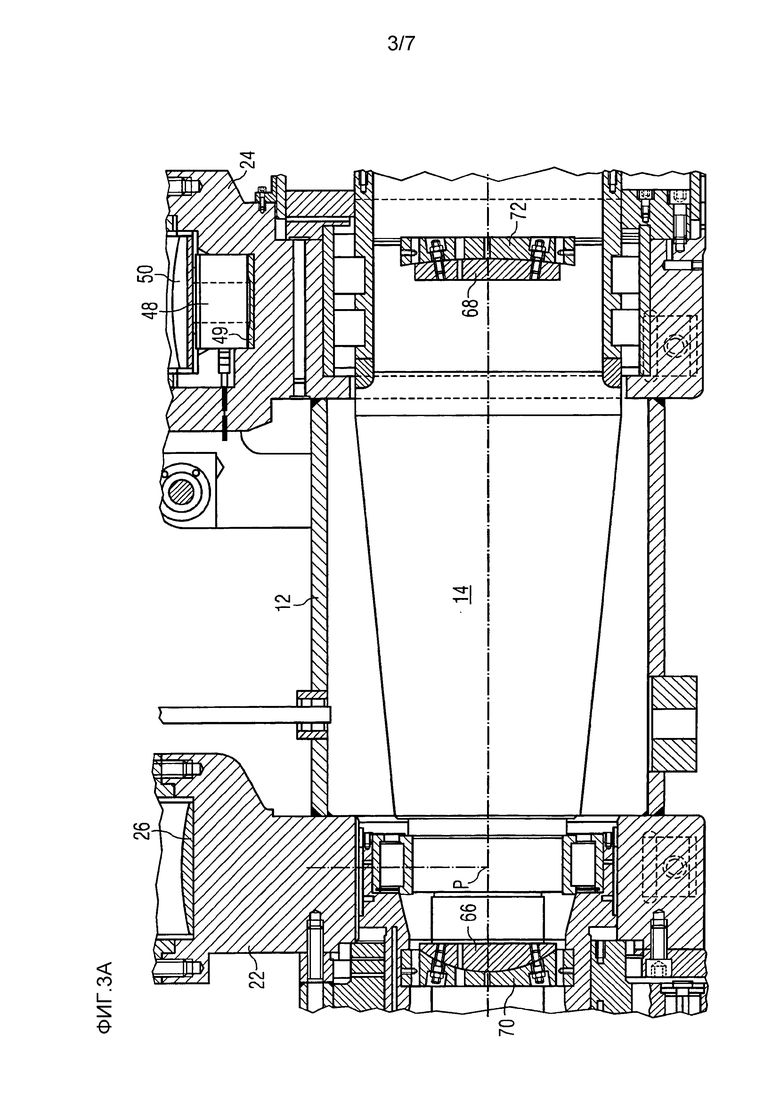
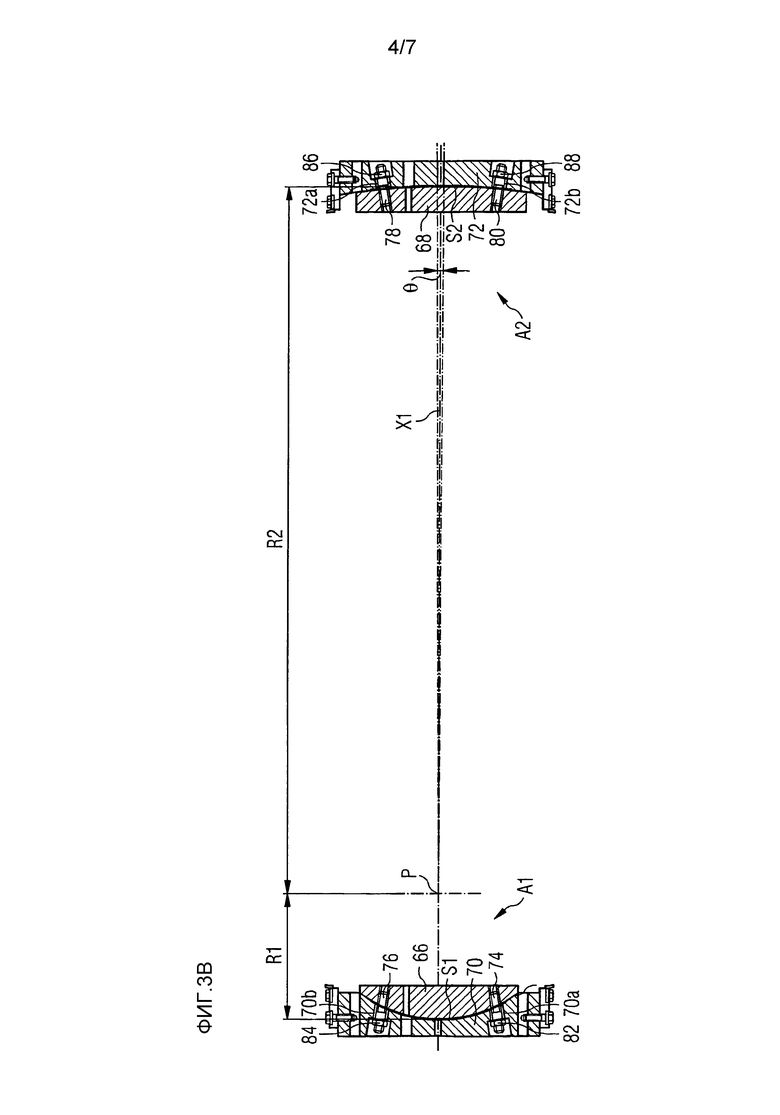
Как показано на фиг. 3а, 3b, 5 и 6а – 6е, правильная машина дополнительно содержит по меньшей мере четыре направляющие 66, 66', 68 и 68' для направления поворота роликового вала 14 вокруг вертикальной оси Р, поперечной оси Х роликового вала. Четыре направляющие 66, 66', 68 и 68' соединены неподвижно с рамой 120 правильной машины и расположены на расстоянии друг от друга в горизонтальном направлении. Каждая направляющая 66, 66', 68 или 68' задает выпуклую поверхность, которая взаимодействует с вогнутой поверхностью, заданной направляемым элементом 70, 70', 72 и 72' корпуса 12 роликового вала. Другими словами, элементы 70, 70', 72 и 72' закреплены фиксировано на корпусе 12 роликового вала и перемещается вместе с этим корпусом. В показанном на фиг. 3а, 3b, 5 и 6а – 6е варианте выполнения элементы 70, 70', 72 и 72' являются блоками скольжения корпуса 12 роликового вала и выступают из корпуса роликового вала. Каждый блок 70, 70', 72 и 72' скольжения поворачивается вместе с корпусом, направляемый соответствующей направляющей 66, 66', 68 или 68'. Каждая вогнутая поверхность каждого блока 70, 70', 72 или 72' скольжения предназначена для скольжения по выпуклой поверхности соответствующей направляющей 66, 66', 68 или 68' во время противоизгибного поворота роликового вала, как показано на фиг. 6b – 6е. Соответствующие вогнутые и выпуклые поверхности узла (А1, A', A2 или A2' на фиг. 5) направляющего/направляемого элемента дополняют по форме друг друга и задают контактную поверхность S1, S2, S1' или S2' (видимые на фиг. 3b и 5). Кроме того, как показано на фиг. 5, два узла А1, A2 направляющего/направляемого элемента и два узла A' A2' направляющего/направляемого элемента расположены, соответственно, на каждой стороне вертикальной плоскости, проходящей через ось Х роликового вала.
В продольном разрезе, показанном на фиг. 3а и 3b, каждая поверхность S1 или S2 каждого узла является частью линии виртуальной окружности С1 или С2 (см. фиг. 1). Первые контактные поверхности S1 и S2 и их расположение выбраны так, что окружности имеют различные радиусы (R1 и R2), и так, что центры виртуальных окружностей С1 и С2 совпадают друг с другом. Другими словами, две виртуальные окружности С1 и С2 имеют один и тот же центр Р. Таким образом, виртуальный центр поворота роликового вала является также виртуальным центром окружностей С1 и С2.
Хотя на фиг. 3 показаны лишь два узла направляющего/направляемого элемента, понятно, что также каждая поверхность S1’ или S2’ каждого узла является частью линии виртуальной окружности С1’ и С2’. Контактные поверхности S1’ и S2’ и их расположение выбраны так, что окружности имеют различные радиусы, и так, что центры виртуальных окружностей совпадают друг с другом. Другими словами, две виртуальные окружности С1’ и С2’ имеют один и тот же центр Р’. Таким образом, виртуальный центр поворота роликового вала является также виртуальным центром окружностей С1’ и С2’. Ортогональная проекция указанных выше окружностей на плоскость фиг. 1 дает окружности С1’ и С2’, совпадающие с окружностями С1 и С2. Поэтому на фиг. 1 одни и те же окружности обозначены двумя позициями С1, С1’ и С2, С2’.
Кроме того, ось противоизгибного поворота перпендикулярна оси Х роликового вала и проходит через точки Р и Р'.
Каждая направляющая 66, 66', 70, 70' закреплена на соответствующем блоке скольжения с помощью пружинных винтов 74, 76 или 78, 80. Каждый пружинный винт 74 – 80 ввинчен в резьбу направляющей 66 или 68 и проходит через цилиндрический проход 70а, 70b, 72а, 72b, заданный с помощью буртика 70 или 72, при этом указанный проход имеет диаметр, больший диаметра каждого винта. Каждая пружина 82, 84, 86, 88 удерживает свой соответствующий винт 74, 76, 78 или 80 в проходе 70а, 70b, 72а, 72b. Разница диаметров между каждым проходом 70а, 70b, 72а, 72b и соответствующим пружинным винтом 74, 76, 78 или 80 является зазором, обеспечивающим возможность поворота блоков 70, 70', 72 и 72' и тем самым корпуса 12 роликового вала и роликового вала 14, относительно вогнутых направляющих.
На фиг. 3b показаны лишь направляющие и блоки скольжения из фиг. 3а. Угол Θ поворота представляет возможную величину противоизгибного поворота роликового вала. Например, в показанном на фигуре варианте выполнения, Θ может изменяться между плюс или минус 0°14’ относительно горизонтальной оси Х1. В этом примере выполнения каждая направляющая 66, 68 (а также направляющие 66’ и 68’, не изображенные на фиг. 3b) содержит выпуклую поверхность скольжения и плоскую противоположную поверхность, и каждый блок 70, 72 скольжения (а также направляющие 70’, 72’, не изображенные на фиг. 3b) имеют в основном прямоугольное поперечное сечение с вогнутой частью на одной из сторон прямоугольника. Вогнутая и выпуклая поверхности узла направляющей/блока скольжения являются дополняющими друг друга поверхностями, т.е. поверхности прилегают друг к другу почти без просвета.
Ниже приводится описание приводной системы поводковых пальцев, согласно данному изобретению, со ссылками на фиг, 4. Каждый поводковый палец 38, 58 имеет наружную резьбовую часть, находящуюся в зацеплении с червячной системой 90. Червячная система 90 содержит два коаксиальных вала 92 и 94 (левый и правый на фиг. 4), которые предназначены для вращения с помощью электродвигателя 98, при этом каждый вал 92, 94 имеет свой червяк 92а, 94а в зацеплении с соответствующим поводковым пальцем 38а или 58а. Между двумя валами 92 и 94 расположена редукторная соединительная система 96, перемещение которой позволяет избирательно передавать вращательное движение, вызываемое электродвигателем 98, на правый приводной вал 94. Каждый приводной вал 92, 94 имеет редукторный конец, и редукторная соединительная система 96 способна совершать возвратно-поступательное движение вдоль оси валов 92 и 94 для соединения левого и правого валов 92 и 94 через их редукторный конец для приведения их во вращение.
В качестве примера, редукторная соединительная система 96 может быть редукторной системой с комбинацией соединения со сцеплением. Как показано на фиг. 2, редукторная соединительная система приводится в возвратно-поступательное движение с помощью сдвигающей вилки 100 (показана в двух различных положениях на фиг. 2), которая в свою очередь приводится в действие с помощью цилиндра 102. За счет этой приводной системы каждый червяк 38, 58 может приводиться в движение по отдельности, и можно точно управлять противоизгибным поворотом роликового вала.
Когда требуется противоизгибная коррекция, то редукторная соединительная система сдвигается так, что осуществляется привод лишь левого вала 92. Это происходит посредством перемещения цилиндра 102, приводящего в движение сдвигающую вилку 100 (смотри фиг. 2). После этого противоизгибный электродвигатель 98 вращается и приводит во вращение левый червяк 38, который в свою очередь приводит в действие левый палец 28. Вращение левого пальца 38 вызывает возвратно-поступательное движение левого винтового поршня 28 вверх или вниз в зависимости от направления вращения противоизгибного электродвигателя 98. Во время возвратно-поступательного движения левый винтовой поршень 28 толкает или тянет левое плечо, которое в свою очередь толкает или тянет корпус 12 роликового вала и тем самым роликовый вал 14 и выпрямительный ролик 20. За счет того, что лишь левый винтовой поршень 28 совершает возвратно-поступательное движение для противоизгибной коррекции, в то время как правый винтовой поршень 52 неподвижен, в комбинации с формой и положением
- узлов 66/70(А1), 66’/70’(А1’), 68/72(А2), 68’/72’(А2’) направляющего/направляемого элемента,
- вогнутой контактной поверхности обоих винтовых поршней 28 и 52,
- поверхностей 26, 50 скольжения,
происходит управляемый поворот роликового вала 14 вокруг оси, поперечной оси роликового вала и проходящей через виртуальный центр Р окружностей С1 и С2 и С3 (смотри фиг. 1). Действительно, поворот корпуса роликового вала направляется с помощью первых направляющих 66, 66’ и первых плеч 70, 70’, образующих первые поворотные шарниры, и с помощью вторых направляющих 68, 68’ и вторых плеч 72, 72’, образующих вторые поворотные шарниры, в результате чего происходит движение поворота вокруг указанной выше поперечной оси, проходящей через точки Р и Р’, под действием возвратно-поступательного движения левого винтового поршня 28. Во время противоизгибного поворота роликового вала 14 вокруг оси РР’, каждый элемент 70, 70’, 72, 72’ скольжения скользит по своей соответствующей направляющей 66, 66’, 68, 68’.
Движение блоков 70, 72 скольжения относительно направляющих 66, 68 схематично показано на фиг. 6b – 6е. Фиг. 6b является видом спереди фиг. 6а перед противоизгибным поворотом, а на фиг. 6d показан схематично в изометрической проекции узел направляющей/блока скольжения перед противоизгибным поворотом. Фиг. 6с является видом спереди фиг. 6а после противоизгибного поворота, а на фиг. 6е показан схематично в изометрической проекции узел направляющей/блока скольжения после противоизгибного поворота. Как показано на фиг. 6с и 6е, во время противоизгибного поворота блоки 70 и 72 скольжения поворачиваются относительно соответствующих направляющих 66, 68’.
Кроме того, во время поворота роликового вала 14 каждый элемент 26, 50 скольжения, расположенный в каждой выемке каждого плеча также поворачивается и скользит по соответствующей вогнутой поверхности соответствующего конца 28а, 52а каждого винтового поршня 28 и 52.
Когда необходимо изменять вертикальное расстояние между двумя последовательными роликами правильной машины 10, согласно изобретению, то редукторная соединительная система 96 сдвигается так, что оба вала 92 и 94 приводятся во вращение. Когда это происходит, то корпус 12 роликового вала полностью перемещается вверх или вниз в зависимости от направления поворота приводного электродвигателя 98. Следовательно, оба винтовых поршня 28 и 52 совершают возвратно-поступательное движение за счет вращения их соответствующего поводкового пальца 38 и 58, и толкает или тянет корпус роликового вала.
Поэтому изобретение можно использовать в двух различных режимах, режиме противоизгибной коррекции и в режиме установки расстояния между роликами в вертикальном направлении.
Как указывалось выше, предусмотрен датчик 48 нагрузки, измеряющий нагрузку, прикладываемую к правому плечу корпуса роликового вала. Этот датчика используется также для измерения величины изгиба, вызванного выпрямлением изделия. Таким образом, может быть образован контур управления противоизгибной коррекцией с помощью заданного значения установки в зависимости от величины изгиба. Это установочное значение передается в электродвигатель для управления скоростью поворота приводного вала 92. Таким образом, можно точно корректировать изгиб, вызванный выпрямлением изделия.
С помощью изобретения, как показано выше, нагрузка распределяется по большим контактным поверхностям, и износ механических частей правильной машины уменьшается по сравнению с решениями из уровня техники, которые приводят к большему зазору и уменьшенным линиям контакта. В противоположность этому, изобретение обеспечивает большие контактные поверхности, уменьшенный зазор и уменьшенный износ частей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПУСКОВОЕ УСТРОЙСТВО | 1991 |
|
RU2048653C1 |
| СТАНОК ДЛЯ ШЛИФОВАНИЯ ПРОВОЛОКИ ПРИ ЕЕ ПЕРЕМАТЫВАНИИ С ОДНОГО БУНТА НА ДРУГОЙ | 1939 |
|
SU63489A1 |
| КУЛАЧКОВЫЙ ЗАЖИМ ДЛЯ УСТАНОВКИ НА НАПРАВЛЯЮЩУЮ СКОЛЬЖЕНИЯ ОПЕРАЦИОННОГО СТОЛА | 2014 |
|
RU2674631C2 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАДИУСА ИЗГИБА И ПОДАЧИ ЗАГОТОВКИ В ГИБОЧНОМ СТАНКЕ | 2014 |
|
RU2705047C2 |
| СЕЯЛКА | 1993 |
|
RU2057422C1 |
| АКСИАЛЬНО-ПОРШНЕВАЯ МАШИНА | 1993 |
|
RU2072436C1 |
| СИСТЕМА ПРИВОДА КЛАПАНОВ ДВИГАТЕЛЯ | 2005 |
|
RU2330164C2 |
| РОТОРНО-ПОРШНЕВАЯ МАШИНА С ОВАЛЬНЫМ ВРАЩАЮЩИМСЯ ПОРШНЕМ, НАПРАВЛЕННО ПЕРЕМЕЩАЮЩИМСЯ В ОВАЛЬНОЙ КАМЕРЕ | 2004 |
|
RU2344296C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ КАРТОННЫХ КОРОБОК | 1993 |
|
RU2111861C1 |
| УСТРОЙСТВО ДЛЯ ЗАВАРИВАНИЯ ЧАЯ | 2012 |
|
RU2604591C2 |
Изобретение относится к правильной машине. Правильная машина содержит раму, на которую опираются корпуса. В каждом корпусе расположен роликовый вал, установленный с возможностью вращения вокруг своей оси. Машина дополнительно содержит по меньшей мере один первый узел, по меньшей мере один второй узел и средства для поворота по меньшей мере одного корпуса роликового вала. Первый узел содержит первую направляющую, задающую первую выпуклую поверхность, и первый соответствующий направляемый элемент, задающий первую вогнутую поверхность, при этом указанные первые поверхности находятся в контакте друг с другом по первой контактной поверхности. Второй узел содержит вторую направляющую, задающую вторую выпуклую поверхность, и второй соответствующий направляемый элемент, задающий вторую вогнутую поверхность, при этом вторые поверхности находятся в контакте друг с другом по второй контактной поверхности. Поворот направляется с помощью узлов вокруг виртуальной оси, поперечной оси роликового вала для компенсации изгиба за счет выпрямления изделия. В результате обеспечивается возможность определения центра поворота. 14 з.п. ф-лы, 6 ил.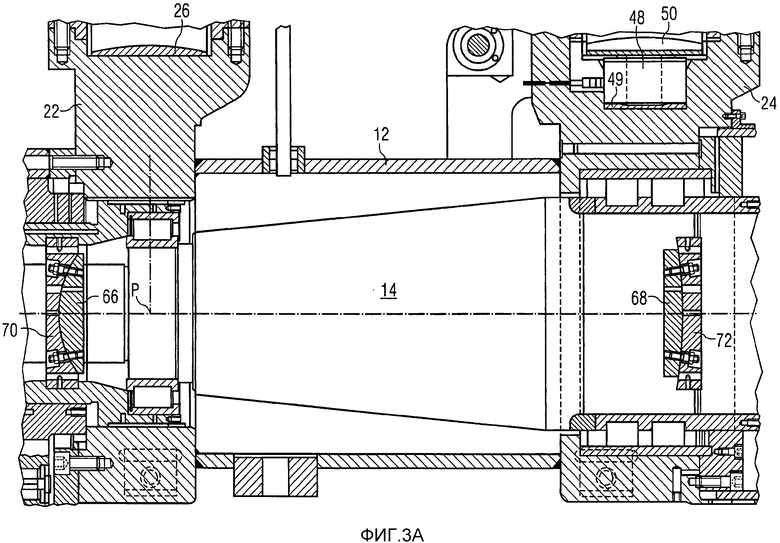
1. Правильная машина (10), содержащая раму (12), на которую опираются корпуса, при этом в каждом корпусе расположен роликовый вал (14), установленный с возможностью вращения вокруг своей оси, отличающаяся тем, что дополнительно содержит:
- по меньшей мере один первый узел (А1), содержащий первую направляющую (66), задающую первую выпуклую поверхность, и первый соответствующий направляемый элемент (70), задающий первую вогнутую поверхность, при этом указанные первые поверхности находятся в контакте друг с другом по первой контактной поверхности (S1),
- по меньшей мере один второй узел (А2), содержащий вторую направляющую (68), задающую вторую выпуклую поверхность, и второй соответствующий направляемый элемент (72), задающий вторую вогнутую поверхность (S2), при этом указанные вторые поверхности находятся в контакте друг с другом по второй контактной поверхности (S2),
- средства (22, 26, 28, 38, 90, 92, 98) для поворота по меньшей мере одного корпуса роликового вала с помощью узлов вокруг виртуальной оси (Р), которая является поперечной оси Х роликового вала, для компенсации изгиба за счет выпрямления изделия.
2. Правильная машина по п. 1, которая дополнительно содержит:
- по меньшей мере один третий узел (A1’), содержащий третью направляющую (66’), задающую третью выпуклую поверхность, и третий соответствующий направляемый элемент (70’), задающий третью вогнутую поверхность, при этом указанные третьи поверхности находятся в контакте друг с другом по третьей контактной поверхности (S1’),
- по меньшей мере один четвертый узел (A2’), содержащий четвертую направляющую (68’), задающую четвертую выпуклую поверхность, и четвертый соответствующий направляемый элемент (72’), задающий четвертую вогнутую поверхность (S2’), при этом указанные четвертые поверхности находятся в контакте друг с другом по четвертой контактной поверхности (S2),
при этом поворот корпуса направляется также с помощью третьего и четвертого узлов вокруг виртуальной оси, которая является поперечной оси Х роликового вала, для компенсации изгиба за счет выпрямления изделия.
3. Правильная машина по п. 1, в которой узлы выполнены и расположены так, что в продольном сечении роликового вала линия контакта каждого узла является соответственно частью первой (С1, С1’) и второй (С2, С2’) виртуальных окружностей, при этом первая (С1, С1’) и вторая (С2, С2’) виртуальные окружности имеют различные радиусы и имеют один и тот же виртуальный центр (Р, Р’), при этом корпус роликового вала установлен с возможностью поворота вокруг указанного центра для коррекции изгиба, вызванного подлежащим выпрямлению изделием.
4. Правильная машина по любому из пп. 1-3, в которой направляющие (66, 68) неподвижно закреплены на раме (120) правильной машины.
5. Правильная машина по любому из пп. 1-3, в которой направляемые элементы (70, 70’, 72 и 72’) неподвижно соединены с одним из корпусов (12) роликового вала и поворачиваются с корпусом роликового вала во время противоизгибного поворота.
6. Правильная машина по любому из пп. 1-3, в которой каждая направляющая (66, 66’, 68, 68’) соединена с соответствующим направляемым элементом (70, 70’, 72, 72’) с помощью пружинных винтов (74, 76, 78, 80), расположенных в выемках, образованных в каждой направляющей и в каждом направляемом элементе, при этом пружинный винт обеспечивает возможность поворота направляемого элемента относительно направляющей во время противоизгибного поворота корпуса роликового вала.
7. Правильная машина по п. 6, в которой каждая выемка каждого направляемого элемента (70, 72), в которой размещен пружинный винт, имеет диаметр, больший диаметра пружинного винта, так что существует зазор между пружинным винтом и стенкой выемки направляемого элемента, в то время как при фиксирующем ввинчивании пружинного винта в выемку соответствующей направляющей (66, 68) зазор обеспечивает возможность поворота каждого направляемого элемента относительно выпуклой направляющей во время противоизгибного поворота корпуса роликового вала.
8. Правильная машина по п. 3 или 7, в которой средства для поворота корпуса роликового вала задают первую контактную поверхность (S3) между выпуклой и вогнутой поверхностями средств (26, 28) для поворота, и при этом в продольном сечении корпуса роликового вала контактная поверхность является частью контактной линии (S3) виртуальной окружности (С3), центр которой также находится в точке Р.
9. Правильная машина по п. 8, которая имеет по меньшей мере два плеча (22, 24) и содержит вторую контактную поверхность (S4).
10. Правильная машина по любому из пп. 1-3, в которой средства для поворота корпуса роликового вала содержат:
- первый винтовой поршень (28) с оконечностью (28а), задающей вогнутую поверхность,
- первый элемент (26) скольжения, содержащий выпуклую поверхность, дополняющую и взаимодействующую с вогнутой поверхностью первого винтового поршня (28),
- второй винтовой поршень (52) с оконечностью (52а), задающей вогнутую поверхность,
- второй элемент (50) скольжения, содержащий выпуклую поверхность, дополняющую и взаимодействующую с вогнутой поверхностью второго винтового поршня,
при этом каждый винтовой поршень расположен и удерживается в проходе, образованном в раме правильной машины.
11. Правильная машина по п. 10, в которой средства для поворота корпуса роликового вала дополнительно содержат по меньшей мере два поводковых пальца (38, 58), при этом каждый поводковый палец взаимодействует с винтовым поршнем для возвратно-поступательного движения каждого винтового поршня, и каждый поводковый палец имеет наружную резьбовую часть (38а, 58а).
12. Правильная машина по п. 11, в которой средства для поворота корпуса роликового вала дополнительно содержат по меньшей мере два соосных приводных вала (92, 94), при этом каждый вал находится в зацеплении с наружной резьбовой частью поводкового пальца для вращения каждого винтового поршня.
13. Правильная машина по п. 12, в которой каждый приводной вал имеет редукторную оконечность, и при этом редукторная соединительная система (90) расположена между двумя приводными валами (92, 94), при этом редукторная соединительная система установлена с возможностью перемещения между
- первым положением, в котором лишь один приводной вал (92) вращается с помощью приводного электродвигателя, при этом это положение приводит к повороту корпуса роликового вала, и
- вторым положением, в котором оба приводных вала (92, 94) вращаются с помощью приводного электродвигателя, что приводит к возвратно-поступательному движению корпуса (12) роликового вала.
14. Правильная машина по п. 13, в которой средства для поворота корпуса роликового вала дополнительно содержат сдвигающую вилку (100), приводимую в движение цилиндром (102), при этом указанная сдвигающая вилка перемещает редукторную соединительную систему между первым и вторым положениями, и наоборот.
15. Правильная машина по п. 9, в которой каждое плечо (22, 24) задает выемку, в каждой выемке размещены конец (28а, 58а) винтового поршня и элемент (26, 50) скольжения.
| US 5327760 A1, 12.07.1994 | |||
| СПОСОБ ПРАВКИ ДЛИННОМЕРНЫХ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ И ПРАВИЛЬНАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2116150C1 |
| ПАТЕНТ С .-.ЛЕСКАЯбиблиотека МБАЮ. Л. Семененко | 0 |
|
SU280198A1 |
| Правильная машина | 1974 |
|
SU531596A1 |
| WO 2008025814 A1, 06.03.2008. | |||

