ИСХОДНАЯ ИНФОРМАЦИЯ
1. ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение в целом относится к производству и, в частности, к производству транспортных средств. В частности, настоящее изобретение относится к способу и устройству для сборки транспортных средств в производственной среде.
2. УРОВЕНЬ ТЕХНИКИ
[0002] Сборка воздушного летательного аппарата является чрезвычайно сложным процессом. Сотни тысяч деталей могут быть собраны для воздушного летательного аппарата.
[0003] Сборка воздушного летательного аппарата может включать производство различных деталей воздушного летательного аппарата в разных географических местах. Эти различные детали могут затем быть окончательно собраны в одном месте. Например, различные участки фюзеляжа композитного воздушного летательного аппарата могут быть собраны в разных местах и доставлены в центральное место, где находится линия окончательной сборки. Кроме того, другие детали, такие как двигатели, вспомогательные силовые установки, кресла, компьютерные системы, линейные сменные блоки или другие компоненты в воздушном летательном аппарате могут быть доставлены в это место для окончательной сборки для формирования собранного воздушного летательного аппарата.
[0004] Сборка различных деталей включает назначение задач различным операторам. Назначение этих задач может быть выполнено в форме экземпляров (instance) производственных заданий. Каждый экземпляр производственного задания может включать в себя инструкции и идентификацию деталей для конкретной сборки в воздушном летательном аппарате.
[0005] Для операторов в цеху может возникать необходимость в идентифицировании мест расположения деталей на воздушном летательном аппарате для того, чтобы следовать инструкциям по сборке, описанным в экземплярах производственных заданий. Эти места расположения соотносятся с конкретным собираемым воздушным летательным аппаратом. В настоящий момент, операторы, которым назначена задача для сборки детали для воздушного летательного аппарат, могут смотреть в бумажные копии деталей воздушного летательного аппарата, чтобы определить, где необходимо осуществлять выполнение задач по установке или сборке детали для воздушного летательного аппарата. Эти бумажные копии могут служить некоторым руководством для оператора, однако часто они могут быть сложными для понимания и могут не включать в себя достаточно информации.
[0006] В некоторых случаях, оператор может рассматривать полученную автоматизированным проектированием модель воздушного летательного аппарата с использованием системы автоматизированного программного проектирования (CAD). Эти типы систем, однако, требуют обучения и опыта для исследования модели воздушного летательного аппарата.
[0007] Например, оператор системы автоматизированного программного проектирования часто использует координаты воздушного летательного аппарата для идентифицирования мест расположения в воздушном летательном аппарате. Координаты воздушного летательного аппарата берут свое начало относительно какого-либо места расположения в воздушном летательном аппарате. Кроме того, при просмотре модели идентифицируют места расположения с использованием координат воздушного летательного аппарата. Эти координаты воздушного летательного аппарата, однако, не являются полезными для оператора, которому назначена задача в экземпляре производственного задания. Координаты воздушного летательного аппарата могут нуждаться в преобразовании в места действия для оператора.
[0008] В результате, у операторов может уходить больше времени, чем это необходимо, им может требоваться дополнительное обучение или то и другое, для того, чтобы осуществлять просмотр мест в воздушном летательном аппарате, где должны быть выполнены задачи, представленные в экземпляре производственного задания. Это дополнительное время или обучение могут увеличивать время или затраты, необходимые для сборки воздушного летательного аппарата.
[0009] Вследствие этого, было бы желательно иметь способ и устройство, в которых учитываются по меньшей мере некоторые из проблем, описанных выше, а также другие возможные проблемы.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[00010] В одном иллюстративном варианте реализации изобретения представлен способ визуального контроля (visually querying) воздушного летательного аппарата. Согласно способу идентифицируют модель для воздушного летательного аппарата. Отображают секции воздушного летательного аппарата в графическом пользовательском интерфейсе на устройстве отображения. Секции соответствуют секциям, произведенным для сборки воздушного летательного аппарата. Секции являются выбираемыми.
[00011] В другом иллюстративном варианте реализации изобретения представлен способ визуального контроля объекта. Согласно способу идентифицируют объект. Идентифицируют модель для объекта. Отображают секции воздушного летательного аппарата в графическом пользовательском интерфейсе на устройстве отображения. Секции соответствуют секциям, произведенным для сборки воздушного летательного аппарата. Секции являются выбираемыми.
[00012] Еще в одном иллюстративном варианте реализации изобретения представлено устройство, которое содержит устройство управления объектами. Устройство управления объектами выполнено с возможностью идентифицирования модели для воздушного летательного аппарата. Устройство управления объектами дополнительно выполнено с возможностью отображения секций воздушного летательного аппарата в графическом пользовательском интерфейсе на устройстве отображения. Секции соответствуют секциям, произведенным для сборки воздушного летательного аппарата. Секции являются выбираемыми.
[00013] Еще в одном иллюстративном варианте реализации изобретения представлена производственная система, которая содержит производственное оборудование, выполненное с возможностью производства воздушного летательного аппарата, управляющую систему (1508), выполненную с возможностью управления производством воздушного летательного аппарата, и устройство управления объектами в управляющей системе (1508). Устройство управления объектами выполнено с возможностью идентифицирования модели для воздушного летательного аппарата и отображения секций воздушного летательного аппарата в графическом пользовательском интерфейсе на устройстве отображения. Секции соответствуют секциям, произведенным для сборки воздушного летательного аппарата, и секции являются выбираемыми.
[00014] Указанные признаки и функции могут быть реализованы независимо в различных вариантах осуществления настоящего изобретения или могут быть скомбинированы с получением других вариантов осуществления изобретения, дополнительные подробности которых могут быть очевидными при обращении к последующему описанию и чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00015] Признаки иллюстративных вариантов реализации изобретения, обеспечивающие новизну по сравнению с уровнем техники, изложены в прилагаемой формуле изобретения. При этом иллюстративные варианты реализации изобретения, а также предпочтительный режим их применения, дополнительные цели и преимущества будут лучше поняты из следующего подробного описания иллюстративного варианта реализации изобретения при рассмотрении вместе с сопровождающими чертежами, на которых:
[00016] на ФИГ. 1 показана иллюстрация блок-схемы производственной среды в соответствии с иллюстративным вариантом реализации изобретения;
[00017] на ФИГ. 2 показана иллюстрация блок-схемы устройства управления объектами в соответствии с иллюстративным вариантом реализации изобретения;
[00018] на ФИГ. 3 показана иллюстрация блок-схемы секционного вида в соответствии с иллюстративным вариантом реализации изобретения;
[00019] на ФИГ. 4 показана иллюстрация блок-схемы идентификатора объема в соответствии с иллюстративным вариантом реализации изобретения;
[00020] на ФИГ. 5 показана иллюстрация блок-схемы экземпляра производственного задания в соответствии с иллюстративным вариантом реализации изобретения;
[00021] на ФИГ. 6 показана иллюстрация графического пользовательского интерфейса для просмотра статусов экземпляров производственных заданий в соответствии с иллюстративным вариантом реализации изобретения;
[00022] на ФИГ. 7 показана иллюстрация позиций воздушного летательного аппарата в здании в соответствии с иллюстративным вариантом реализации изобретения;
[00023] на ФИГ. 8 показана иллюстрация графического пользовательского интерфейса секций воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения;
[00024] на ФИГ. 9 показана еще одна иллюстрация графического пользовательского интерфейса секций воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения;
[00025] на ФИГ. 10 показана иллюстрация объема, отображенного в ответ на выбор секции, в соответствии с иллюстративным вариантом реализации изобретения;
[00026] на ФИГ. 11 показана иллюстрация структурной схемы процесса визуального контроля объекта в соответствии с иллюстративным вариантом реализации изобретения;
[00027] на ФИГ. 12 показана иллюстрация структурной схемы процесса визуального контроля воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения;
[00028] на ФИГ. 13 показана иллюстрация блок-схемы системы обработки данных в соответствии с иллюстративным вариантом реализации изобретения;
[00029] на ФИГ. 14 показана иллюстрация способа производства и обслуживания воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения;
[00030] на ФИГ. 15 показана иллюстрация воздушного летательного аппарата, в котором может быть применен иллюстративный вариант реализации изобретения; и
[00031] на ФИГ. 16 показана иллюстрация производственной системы в соответствии с иллюстративным вариантом реализации изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[00032] В иллюстративных вариантах реализации изобретения рассматриваются и учитываются одно или более различных соображений. Например, в иллюстративных вариантах реализации изобретения рассматривается и учитывается, что при выполнении задач в экземплярах производственных заданий операторы могут смотреть на визуализацию воздушного летательного аппарата. Например, иллюстративные варианты признают и принимают во внимание, что операторы могут просматривать модель воздушного летательного аппарата с указанными деталями. В иллюстративных вариантах реализации изобретения рассматривается и учитывается, что этот процесс, однако, является трудоемким. Операторы в цеху, выполняющие сборку, часто не имеют опыта и не обучены для использования программы автоматизированного проектирования, используемой для просмотра моделей.
[00033] Просмотр модели воздушного летательного аппарата может отнимать больше времени и усилий, чем необходимо. Например, операторам может требоваться дополнительное обучение. В некоторых случаях, операторы могут полагаться на других операторов, имеющих подготовку и опыт. Таким образом, просмотр деталей в модели может отнимать больше времени, чем необходимо.
[00034] Иллюстративные варианты реализации изобретения обеспечивают создание способа и устройства для визуального контроля воздушного летательного аппарата. Согласно способу идентифицируют модель для воздушного летательного аппарата. Отображают секции воздушного летательного аппарата в графическом пользовательском интерфейсе на устройстве отображения. В иллюстративных примерах секции могут соответствовать секциям, произведенным для сборки воздушного летательного аппарата. Секции являются выбираемыми.
[00035] Со ссылкой на фигуры чертежей, а в частности на ФИГ. 1, изображена иллюстрация блок-схемы производственной среды в соответствии с иллюстративным вариантом реализации изобретения. Производственная среда 100 является примером производственной среды, в которой может быть собран объект 102.
[00036] В этом иллюстративном примере объект 102 имеет форму воздушного летательного аппарата 104. Объект 102 завершают посредством сборки деталей 106. Деталь является группой компонентов. При использовании в настоящем документе "группа", при использовании в отношении объектов, означает одно или более объектов. Например, группа компонентов является одним или более компонентов.
[00037] Деталь в этих проиллюстрированных примерах может быть одиночным компонентом или узлом компонентов. Например, деталь может быть креслом, рядом кресел, полетной развлекательной системой, каналом, системой каналов, приемником глобальной системы позиционирования, двигателем, корпусом двигателя, входным устройством или другими подходящими типами деталей.
[00038] В этом иллюстративном примере сборка деталей 106 может производиться в месте 107 сборки в здании 108 из зданий 110 в производственном сооружении 112. Сборка деталей 106 в здании 108 может происходить в позициях 114 в месте 107 сборки для объекта 102. Каждая позиция в позициях 114 представляет собой место расположения в здании 108, в котором выполняют группу задач 118 для сборки объекта 102.
[00039] В этих иллюстративных примерах задача представляет собой часть работы. Задача может состоять из одной или более операций, которые выполняются группой операторов 122, назначенных для работы по сборке объекта 102.
[00040] В иллюстративных примерах устройство 124 управления объектами может быть использовано для управления сборкой объекта 102. Когда объектом 102 является воздушный летательный аппарат 104, устройство 124 управления объектами может быть частью системы управления воздушным летательным аппаратом. Устройство 124 управления объектами может быть реализовано в программном обеспечении (software), аппаратных средствах (hardware), программно-аппаратных средствах (firmware) или их комбинации.
[00041] При использовании программного обеспечения (software) операции, выполняемые устройством 124 управления объектами, могут быть реализованы в программном коде, выполненном с возможностью запуска в процессорном блоке. При использовании программно-аппаратных средств (firmware) операции, выполняемые устройством 124 управления объектами, могут быть реализованы в программном коде и данных и сохранены в постоянном запоминающем устройстве для запуска в процессорном блоке. При использовании аппаратных средств (hardware) они могут включать в себя схемы, которые работают для выполнения операций в устройстве 124 управления объектами.
[00042] В указанных иллюстративных примерах аппаратные средства могут быть выполнены в виде системы замыкания, интегральной схемы, специализированной интегральной схемы (ASIC), программируемого логического устройства или аппаратных средств какого-либо другого подходящего типа, выполненных для выполнения множества операций. С программируемым логическим устройством, рассматриваемое устройство может быть выполнено с возможностью выполнения указанного множества операций. Конфигурация рассматриваемого устройства может быть изменена позднее или может иметь постоянную конфигурацию для выполнения указанного множества операций. Примеры программируемых логических устройств включают в себя, например, программируемый логический блок, программируемую матричную логическую схему, логическую матрицу с эксплуатационным программированием, логическую матрицу с эксплуатационным программированием и иные подходящие устройства на основе аппаратных средств. Кроме того, процессы могут быть реализованы в органических компонентах, встроенных в неорганические компоненты, и могут состоять целиком из органических компонентов, за исключением человека. Например, процессы могут быть реализованы в виде схем в органических полупроводниках.
[00043] Как показано на чертежах, устройство 124 управления объектами может быть реализовано в компьютерной системе 126. Компьютерная система 126 представляет собой один или более компьютеров. Если используется более одного компьютера, компьютеры в компьютерной системе 126 могут сообщаться друг с другом с использованием средства сообщения, такого как сеть. Вся компьютерная система 126 может быть размещена в одном месте или в разных географически местах. Например, компьютерная система 126 может быть распределена по зданию 110 или размещена в здании 108. Участки компьютерной системы 126 могут быть даже размещены в другом географическом месте, отделенном от производственного сооружения 112.
[00044] При управлении сборкой объекта 102, устройство 124 управления объектами может управлять задачами 118 и информацией 128 об объекте 102. В этом иллюстративном примере управление задачами 118 может включать в себя по меньшей мере одно из назначения задач 118 операторам 122, отслеживания статуса задач 118, организации задач 118, предоставления информации о задачах 118 или другие подходящие операции. Информация 128 может включать в себя, например, модели объектов, материальные запасы деталей или другую подходящую информацию, относящуюся к объекту 102.
[00045] При использовании в настоящем документе выражение "по меньшей мере одно из следующего", употребляемое со списком объектов, означает, что могут быть использованы различные комбинации из одного или большего количества приведенных в списке объектов и только один из объектов, указанных в списке, может быть необходим. Например, без ограничения, выражение "по меньшей мере одно из следующего: объект А, объект В и объект С" может включать объект А, объект А и объект В или объект В. Этот пример также может включать объект А, объект В и объект С или объект В и объект С.Объект может представлять собой конкретный объект, вещь или категорию. Иными словами, "по меньшей мере одно из следующего" означает, что любое сочетание элементов и их количество из этого списка может быть использовано, но не все из пунктов списка должны присутствовать.
[00046] В этих иллюстративных примерах устройство 124 управления объектами может управлять задачами 118 с использованием назначений 130 в форме экземпляров 132 производственных заданий. Например, устройство 124 управления объектами может назначать задачи посредством использования экземпляров 132 производственных заданий операторам 122 для выполнения и сборки объекта 102. Кроме того, статус экземпляров 132 производственных заданий может быть использован для идентифицирования состояния сборки объекта 102 операторами 122.
[00047] Кроме того, задачи 118 могут иметь зависимости 133. Иными словами, задачи 118 могут быть выполнены в конкретном порядке. Зависимости 133 могут обуславливать то, когда задачи в задачах 118 должны быть выполнены в отношении других задач в задачах 118. Зависимости 133 могут также быть для деталей 106 в дополнение или вместо задач 118. В этой форме, зависимости 133 могут привести к получению зависимостей 133 для задач 118.
[00048] В результате, зависимости 133 могут влиять на способ, которым назначения 130 выполняются в качестве экземпляров 132 производственных заданий. В частности, зависимости 133 могут быть использованы для определения того, когда экземпляры 132 производственных заданий должны быть выполнены.
[00049] В этих иллюстративных примерах устройство 124 управления объектами может обеспечивать различные функции и возможности для сборки объекта 102. Например, устройство 124 управления объектами может включать в себя по меньшей мере одно из системы 134 визуализации объектов, системы 135 визуализации статуса производственных заданий или других типов систем. Указанные системы могут быть реализованы с использованием аппаратных средств и программного обеспечения или какой-либо их комбинации.
[00050] В одном иллюстративном примере система 134 визуализации объектов может обеспечивать визуализацию объекта 102 операторам 122. В частности, операторы 122 могут выполнять контрольные запросы с использованием системы 134 визуализации объектов для просмотра множества секций 136 в объекте 102. В частности, секции 136 могут являться секциями, которые соответствуют секциям в производственном сооружении 112 для сборки объекта 102, такого как воздушный летательный аппарат 104.
[00051] В этих иллюстративных примерах производство может включать в себя по меньшей мере одно из изготовления компонентов для деталей, сборки компонентов для формирования деталей, сборки деталей для объекта 102 или какую-либо другую подходящую производственную операцию, выполняемую для сборки объекта 102.
[00052] Например, устройство 124 управления объектами может обеспечивать визуальную информацию обо всем объекте 102 или одной или более конкретных секций объекта 102. Этот тип визуализации может быть особенно полезен, если объект 102 имеет форму воздушного летательного аппарата 104. Информация 128 может быть использована, когда операторы 122 выполняют задачи 118 в отношении деталей 106 для сборки воздушного летательного аппарата 104.
[00053] В другом иллюстративном примере система 135 визуализации статуса производственных заданий может обеспечивать визуализацию статуса 137 экземпляров 132 производственных заданий. Эта информация может быть обеспечена операторам 122 визуально. В частности, устройство 124 управления объектами может работать в качестве системы 135 визуализации статуса производственных заданий, а также обеспечивать другие подходящие функции при управлении сборкой объекта 102.
[00054] Со ссылкой на ФИГ. 2 показана иллюстрация блок-схемы устройства управления объектами в соответствии с иллюстративным вариантом реализации изобретения. На этом чертеже показаны примеры компонентов, которые могут быть реализованы в устройстве 124 управления объектами по ФИГ. 1.
[00055] Как показано на чертежах, устройство 124 управления объектами включает в себя множество различных компонентов. Например, устройство 124 управления объектами включает в себя устройство 202 управления назначениями, устройство 204 визуализации объектов, идентификатор 206 материально-производственных запасов, идентификатор 207 статуса и графический пользовательский интерфейс 208. Эти различные компоненты вместе с устройством 124 управления объектами могут быть реализованы с использованием аппаратных средств и программного обеспечения или какой-либо их комбинации.
[00056] Графический пользовательский интерфейс 208 выполнен с возможностью предоставления интерфейса для операторов 122 по ФИГ. 1 для взаимодействия с устройством 124 управления объектами. В этих иллюстративных примерах графический пользовательский интерфейс 208 может быть отображен на системе 209 отображения в интерфейсной системе 210. Система 209 отображения представляет собой аппаратные средства и может включать в себя одно или более устройств отображения, выбранных из по меньшей мере одного из следующего: жидкокристаллический дисплей (LCD), светоизлучающий дисплей (LED), органический светоизлучающий дисплей (OLED), или другие подходящие типы устройств отображения.
[00057] Данные ввода могут быть получены от операторов 122 через систему 211 ввода в интерфейсной системе 210. Система 211 ввода является аппаратной системой. Система 211 ввода может включать в себя одно или более устройств. Эти устройства могут включать в себя по меньшей мере одно из следующего: клавиатура, мышь, джойстик, сенсорная панель, или другие подходящие типы устройств.
[00058] В этом иллюстративном примере устройство 202 управления назначениями выполнено с возможностью управления назначениями 130 в форме экземпляров 132 производственных заданий в базе данных 212 производственных заданий. Например, устройство 202 управления назначениями может быть использовано для назначения задач 118 по ФИГ. 1 операторам 122 с использованием экземпляров 132 производственных заданий. Кроме того, устройство 202 управления назначениями также может быть выполнено с возможностью принимать информацию о выполнении задач 118, назначенных посредством экземпляров 132 производственных заданий. Эта информация может быть использована устройством 202 управления назначениями для выработки и обновления статуса 213 для экземпляров 132 производственных заданий.
[00059] Устройство 204 визуализации объектов выполнено с возможностью выработки графических представлений 214 для деталей 106 по ФИГ. 1. Графические представления 214 могут быть отображены на графическом пользовательском интерфейсе 208 в системе 209 отображения. Как показано на чертежах, устройство 204 визуализации объектов выполнено с возможностью доступа к базе данных 215 моделей. Устройство 204 визуализации объектов может идентифицировать модель 216 из моделей 217 в базе данных 215 моделей для объекта 102 по ФИГ. 1 и, в частности, для воздушного летательного аппарата 104 по ФИГ. 1. В этом иллюстративном примере используют модель 216 для выработки графических представлений 214.
[00060] В этих иллюстративных примерах графические представления 214 могут быть выработаны для секций 136 объекта 102 по ФИГ. 1, который может быть выполнен в форме воздушного летательного аппарата 104. В этом иллюстративном примере модель 216 может быть идентифицирована для объекта 102 из моделей 217 в базе данных 215 моделей. Модели 217 могут принимать различные формы. Например, без ограничения, модели 217 могут включать в себя файлы системы автоматизированного проектирования (CAD).
[00061] Каждая модель в моделях 217 может быть выполнена для конкретного объекта. Объекты могут представлять собой один тип, но для различных экземпляров производственных заданий. Например, если модели 217 выполнены для конкретного типа воздушного летательного аппарата, каждая модель может быть выполнена для конкретного воздушного летательного аппарата, который собирается для клиента. Различные модели могут быть для одной модели воздушного летательного аппарата, но могут иметь отличия для различных опций, выбранных клиентом. В других иллюстративных примерах модели 217 могут включать в себя модели для различных типов воздушного летательного аппарата 104.
[00062] Выработка графических представлений 214 может быть основана на всей модели 216 или группе объемов 218 в модели 216. Эти объекты могут иметь различные формы. Например, объем 219 в объемах 218 может быть кубом, прямоугольным параллелепипедом, цилиндром, сферой или любой другой подходящей формой.
[00063] В этих иллюстративных примерах объем 219 выполнен для по меньшей мере участка детали в деталях 106 объекта 102. Объем 219 может быть достаточно большим, чтобы охватить часть. Объем 219 может также быть большим, чем деталь. В этих иллюстративных примерах объем 219 может иметь немного свободного пространства вокруг детали для ее просмотра в графическом пользовательском интерфейсе. Например, некоторое количество свободного пространства вокруг этой части может быть для просмотра детали в графическом пользовательском интерфейсе под одним или более углами. В этом примере указанные один или более углов могут являться углами одним или более углами с точки зрения оператора. В этом примере точка зрения оператора может быть точкой зрения оператора, выполняющего задачу, связанную с указанной деталью.
[00064] Как показано на чертежах, объемы 218 могут быть идентифицированы в модели 216 с использованием базы данных 220 объемов. База данных 220 объемов представляет собой совокупность информации, которая может быть использована для идентифицирования того, какие объемы в объемах 218 могут быть отображены в качестве графических представлений 214. В частности, указанная совокупность информации может включать в себя идентификаторы 221 объема. Например, идентификатор 222 объема в идентификаторах 221 объема может задавать объем 219 в объемах 218.
[00065] В этих иллюстративных примерах идентификация объема 219 может быть выполнена с использованием секционного вида 223 в секционных видах 224 в базе данных 225 секционных видов. Секционные виды 224 могут включать в себя секционные виды различных объектов. Например, секционный вид 223 может соответствовать модели 216. Оператор может выбирать объемы 218 с использованием секционного вида 223, отображенного на графическом пользовательском интерфейсе 208 в этом конкретном примере.
[00066] Как показано на чертежах, секционные виды 224 в базе данных 225 секционных видов могут обеспечивать представление видов секций 136 для объекта 102. В иллюстративных примерах секции 136 соответствуют секциям, произведенным для сборки объекта 102. В частности, секции 136 могут соответствовать секциям, произведенным для сборки воздушного летательного аппарата 104.
[00067] Кроме того, секционные виды 224 могут включать в себя различные уровни детализации. Например, секционные виды 224 могут включать в себя иерархию уровней, на которых нижние уровни имеют больше подробностей о воздушном летательном аппарате 104, чем более высокие уровни в иерархии. В некоторых иллюстративных примерах выбор секционного вида в секционных видах 224 может привести к получению еще одного отображаемого секционного вида. В других иллюстративных примерах выбор, выполненный на секционном виде, может привести к получению графических представлений 214, вырабатываемых из модели 216 и отображаемых на графическом пользовательском интерфейсе 208. Таким образом, оператор может осуществлять визуальный контроль воздушного летательного аппарата 104 посредством различных секционных видов в секционных видах 224.
[00068] В результате, взаимодействие, осуществляемое оператором для выработки ввода пользователя с секционным видом 223, отображаемом в графическом пользовательском интерфейсе 208, может быть использовано для идентифицирования объемов 218 в модели 216. Ввод пользователя может быть использован для идентифицирования идентификатора 222 объема из идентификаторов 221 объема. Идентификатор 222 объема может указывать на объем 219 в модели 216.
[00069] В этих иллюстративных примерах устройство 204 визуализации объектов может вырабатывать контрольные запросы с использованием идентификаторов 221 объема для получения информации из модели 216 в базе данных 215 моделей. В частности, информация может представлять собой данные об объеме 219 в модели 216 для воздушного летательного аппарата 104.
[00070] Как показано на чертежах, устройство 204 визуализации объектов также может быть выполнено с возможностью выработки графических представлений 214 для состояний 226 объекта 102. В этих иллюстративных примерах состояния 226 могут быть использованы для объекта 102 в форме воздушного летательного аппарата 104. Иными словами, воздушный летательный аппарат 104 может иметь различные детали в деталях 106, которые устанавливают в различных состояниях в состояниях 226. В иллюстративных примерах состояния 226 могут принимать форму условия сборки 227 для объекта 102.
[00071] Например, состояния 226 могут быть основаны на позициях 114 воздушного летательного аппарата 104 внутри места 107 сборки в здании 108 по ФИГ. 1. В этих иллюстративных примерах состояния 226 выбраны по меньшей мере из одного из следующего: плановые состояния 228 или фактические состояния 229.
[00072] Воздушный летательный аппарат 104 может иметь различные плановые состояния в плановых состояниях 228 в различных позициях в позициях 114. В этом иллюстративном примере плановое состояние в плановых состояниях 228 включает в себя детали, которые предполагают установить в конкретной позиции в позициях 114. Иными словами, эти детали могут быть или могут не быть установлены в этой позиции.
[00073] В этих иллюстративных примерах плановое состояние может быть основано на прошлой позиции, текущей позиции или будущей позиции воздушного летательного аппарата 104 в позициях 114. Иными словами, графические представления 214 могут быть выработаны для любой позиции, которая присутствует для плановых состояний 228 для воздушного летательного аппарата 104.
[00074] Как показано на чертежах, фактическое состояние в фактических состояниях 229 включает в себя детали 106, которые фактически были установлены в воздушном летательном аппарате 104. Иными словами, конкретное состояние может иметь выбранное количество деталей, которые установлены в этом состоянии. Фактическое состояние в фактических состояниях 229 может быть основано на по меньшей мере одной из прошлой позиции или текущей позиции воздушного летательного аппарата 104. Иными словами, графические представления 214 могут быть выработаны для деталей 106, фактически установленных на предыдущий момент времени. Этот предыдущий момент времени может быть выбран оператором. Таким образом, оператор может видеть задачи 118, выполняемые для установки деталей 106 в какой-либо предыдущий момент времени.
[00075] Кроме того, фактическое состояние может являться текущим состоянием воздушного летательного аппарата 104. Иными словами, графические представления 214 могут быть выработаны для деталей 106, которые были установлены в настоящий момент времени. Таким образом, графические представления 214 могут быть использованы для визуализации деталей 106, которые имеются в настоящий момент в воздушном летательном аппарате 104.
[00076] В этих иллюстративных примерах идентификация деталей, которые уже были установлены или деталей, установленных в предыдущие моменты времени, может быть идентифицирована с использованием экземпляров 132 производственных заданий. В частности, экземпляры 132 производственных заданий могут указывать на то, установлены ли детали в деталях 106 или какие детали в деталях 106 были установлены.
[00077] База данных 215 моделей представляет собой базу данных моделей для объектов. В этих иллюстративных примерах эти модели могут быть, например, получены с использованием системы автоматизированного программного проектирования (CAD). Конечно, может быть использован любой тип модели, который может предоставить информацию о трехмерной геометрии объектов. Кроме того, эти модели также могут включать в себя другую информацию о материалах, узлах, полученных по инструкциям, или другие подходящие типы информации.
[00078] Как показано на чертежах, идентификатор 206 материально-производственных запасов выполнен с возможностью доступа к базе данных 230 материально-производственных запасов. База данных 230 материально-производственных запасов содержит информацию о деталях. База данных 230 материально-производственных запасов может включать в себя информацию о том, есть ли на складе детали, когда детали будут доставлены, информацию о количестве доступных деталей или другие подходящие типы информации.
[00079] Как показано на чертежах, идентификатор 207 статуса выполнен с возможностью обеспечения визуализации статуса для одного или более экземпляров 132 производственных заданий. В этом иллюстративном примере идентификатор 207 статуса выполнен с возможностью обеспечения оператора графической интерфейсной частью (graphical front end) через графический пользовательский интерфейс 208 для идентифицирования статуса экземпляра производственного задания в конкретном месте расположения объекта 102, такого как воздушный летательный аппарат 104. Эта информация может быть идентифицирована без того, что оператор знает координаты конкретного места расположения.
[00080] В этих иллюстративных примерах устройство 204 визуализации объектов выполнено с возможностью идентифицирования модели объекта 102, такого как воздушный летательный аппарат 104. Например, устройство 204 визуализации объектов может идентифицировать модель в базе данных 215 моделей для объекта 102.
[00081] Идентификатор 207 статуса также выполнен с возможностью идентифицирования экземпляров 132 производственных заданий для объекта 102. Идентификация может быть выполнена через взаимодействие с устройством 202 управления назначениями.
[00082] В этом иллюстративном примере идентификатор 207 статуса также выполнен с возможностью идентифицирования статуса 213 экземпляров 132 производственных заданий. Эта идентификация также может быть выполнена посредством устройства 202 управления назначениями.
[00083] Устройство 204 визуализации объектов выполнено с возможностью отображения графических представлений 214 деталей 106 по ФИГ. 1 для группы экземпляров 132 производственных заданий в графическом пользовательском интерфейсе 208 на устройстве отображения в системе 209 отображения. Выработка графических представлений 214 может быть основана на идентификации группы экземпляров 132 производственных заданий. Иными словами, устройство 204 визуализации объектов выполнено с возможностью получения идентификации деталей в указанной группе экземпляров 132 производственных заданий. Идентификация этих деталей может быть использована для выработки графических представлений 214.
[00084] Кроме того, идентификатор 207 статуса также выполнен с возможностью отображения совокупности графических индикаторов 231 вместе с графическими представлениями 214 деталей 106, отображенных на графическом пользовательском интерфейсе 208 устройством 204 визуализации объектов. При использовании в настоящем документе "совокупность", когда используется в отношении объектов, означает один или более объектов. Например, совокупность графических индикаторов 231 представляет собой один или более графических индикаторов 231.
[00085] В этих иллюстративных примерах графический индикатор в графических индикаторах 231 считается отображенным вместе с графическим представлением в графических представлениях 214, когда внимание оператора, просматривающего графические индикаторы 231, привлечено к указанным деталям. Таким образом, графический индикатор может быть отображен в качестве части графического представления, на графическом представлении, в некоторой близости от графического представления или каким-либо другим подходящим способом, который привлекает внимание к графическому представлению.
[00086] Совокупность графических индикаторов 231, отображенных вместе с графическими представлениями 214 деталей 106 может принимать различные формы. Например, совокупность графических индикаторов 231 может быть выбрана из по меньшей мере одного из цвета, штриховки, иконки, выделения подсветкой, анимации или других подходящих типов графических индикаторов.
[00087] Кроме того, указанная группа экземпляров 132 производственных заданий может быть идентифицирована множеством различных способов. Например, указанная группа экземпляров 132 производственных заданий может быть идентифицирована посредством ввода пользователя в графический пользовательский интерфейс 208 от оператора. Например, принятым вводом пользователя может быть выбор указанной группы экземпляров 132 производственных заданий.
[00088] В другом иллюстративном примере идентификация указанной группы экземпляров 132 производственных заданий может быть идентифицирована на основе ввода пользователя с выбором группы деталей 106 в объекте 102 по ФИГ. 1. Выбор указанной группы деталей 106 может быть выбором одной указанной группы деталей 106 из списка деталей 106 и выбором указанной группы деталей 106 из отображения графических представлений 214 деталей 106 в графическом пользовательском интерфейсе 208.
[00089] Кроме того, идентификатор 207 статуса может отображать информацию об экземпляре производственных заданий для детали, выбранной из графических представлений 214 деталей 106, отображенных в графическом пользовательском интерфейсе 208.
[00090] С использованием информации в графическом пользовательском интерфейсе 208 могут быть выполнены реальные операции. Например, сборка объекта 102 по ФИГ. 1 может управляться на основе графических представлений 214 деталей 106 для экземпляров 132 производственных заданий и совокупности графических индикаторов 231, отображенных на графическом пользовательском интерфейсе 208. Например, идентификации операций, которые должны быть выполнены, могут быть выполнены с использованием этой визуализации. Эти операции могут включать в себя указание на то, когда конкретные детали должны быть собраны, когда должны быть проведены проверки деталей, собранных в объекте 102, или на другие подходящие типы операций.
[00091] На ФИГ. 2 различные компоненты проиллюстрированы размещенными в устройстве 124 управления объектами. Эти различные компоненты могут быть использованы в качестве части различных систем. Системы могут включать в себя по меньшей мере одно из системы 134 визуализации объектов по ФИГ. 1, системы 135 визуализации статуса производственных заданий по ФИГ. 1 и других подходящих систем. Компонент в устройстве 124 управления объектами может быть использован более чем в одной системе. Например, устройство 204 визуализации объектов может находиться в системе 134 визуализации объектов и в системе 135 визуализации статуса производственных заданий. Иными словами, различные компоненты, проиллюстрированные в устройстве 124 управления объектами, могут быть использованы в одно то же время различными системами.
[00092] Со ссылкой на ФИГ. 3 показано изображение блок-схемы секционного вида в соответствии с иллюстративным вариантом реализации изобретения. Показан пример варианта реализации для секционного вида 223 на ФИГ. 2.
[00093] Как показано на чертежах, секционный вид 223 включает в себя множество различных элементов информации. Например, секционный вид 223 включает в себя секции 300 и активные точки 302.
[00094] Секции 300 являются графическими представлениями, соответствующими секциям 136 для объекта 102 и, в частности, воздушного летательного аппарата 104 по ФИГ. 1. В этих иллюстративных примерах секции 300 могут быть размещены в одном изображении, нескольких изображениях или какой-либо иной подходящей форме. Кроме того, секции 300 являются графическими представлениями, соответствующими секциям 136, произведенным для сборки воздушного летательного аппарата 104.
[00095] В этих иллюстративных примерах секции 300 могут быть выбираемыми. Выбор секции 304 в секциях 300, имеющей активную точку 306 приводит к получению объема, соответствующего секции 304 в отображаемой модели 216 в этом иллюстративном примере. Активная точка 306 может быть указателем на идентификатор 222 объема, связанный с объемом 219. Например, активная точка 306 может включать в себя универсальный указатель ресурса или какие-либо другие подходящие условные обозначения адресации для идентифицирования идентификатора 222 объема из идентификаторов 221 объема в базе данных 220 объемов.
[00096] Со ссылкой на ФИГ. 4 показано изображение блок-схемы идентификатора объема в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере показан один вариант реализации для идентификатора 222 объема по ФИГ. 2.
[00097] Идентификатор 222 объема включает в себя множество компонентов. Как показано на чертежах, идентификатор 222 объема включает в себя идентификатор 400 и дескриптор 402 объема.
[00098] Идентификатор 400 отличает идентификатор 222 объема от других идентификаторов 221 объема, которые могут присутствовать в базе данных 220 объемов. Идентификатор 400 может иметь различные формы. Например, идентификатор 400 может быть словом, фразой, числом, буквенно-цифровой строкой или иметь какую-либо другую подходящую форму.
[00099] Дескриптор 402 объема описывает указанный объем в модели 216. Например, дескриптор 402 объема может иметь форму координат 406. Координаты 406 лежат в системе координат, используемой моделью 216 в этом примере. Например, координаты 406 могут представлять собой три координаты, которые могут быть использованы для определения многоугольника, куба или кубоида. Конечно, в дескрипторе 402 объема может присутствовать отличная от координаты 406 информация. Например, дескриптор 402 объема может включать в себя координату и радиус, используемые для определения объема 219 в форме сферы. Еще в одних иллюстративных примерах одна координата может присутствовать с предварительно выбранными смещениями, которые определяют объем 219 в виде куба или какой-либо другой формы.
[000100] В некоторых иллюстративных примерах идентификатор объема также может включать в себя точку зрения 408. Точка зрения 408 может определять вид объема, отображенного оператору, когда графические представления 214 отображают в графическом пользовательском интерфейсе. Например, точка зрения 408 может включать в себя координаты 410 точки зрения с использованием системы координат для указанного объема.
[000101] Со ссылкой на ФИГ. 5 показано изображение блок-схемы экземпляра производственного задания в соответствии с иллюстративным вариантом реализации изобретения. Как показано на чертежах, экземпляр 500 производственного задания представляет собой пример экземпляра производственного задания из экземпляров 132 производственных заданий по ФИГ. 1.
[000102] Как показано на чертежах, экземпляр 500 производственного задания может включать в себя множество различных деталей. Экземпляр 500 производственного задания включает в себя идентификатор 502, классификацию 503, описание 504, задачу 505, назначенных операторов 506, идентификатор 508 детали, место расположения 510, инструкции 512 и статус 518.
[000103] Как показано на чертежах, идентификатор 502 может быть использован, чтобы однозначно идентифицировать задачу в задачах 118 по ФИГ. 1. Идентификатор 502 может являться буквенно-цифровым идентификатором, множеством или каким-либо иным подходящим типом идентификатора.
[000104] В этом иллюстративном примере используют классификацию 503 для классифицирования экземпляра производственного задания. Эта классификация может быть основана на типе задачи, подлежащей выполнению. Например, классификации могут включать в себя установку кресел, проводку, установку линейных сменных блоков или другие подходящие типы классификаций. Классификация может быть описательной или может иметь форму идентификатора или кода другого типа.
[000105] Описание 504 обеспечивает описание задачи 505. Это описание может быть кратким описанием, чтобы предоставить оператору информации о задаче 505. Описание может представлять собой несколько слов или одно предложение в некоторых иллюстративных примерах.
[000106] Задача 505 идентифицирует работу, подлежащую выполнению. Например, задача 505 может состоять в установке детали, сборке деталей, выполнении проверки или какой-либо иной подходящей части работы.
[000107] Назначенные операторы 506 идентифицируют группу операторов, которые могут быть назначены для выполнения задачи 505. В некоторых случаях, оператор может быть еще не назначен для выполнения задачи 505 для экземпляра 500 производственного задания.
[000108] В этом иллюстративном примере идентификатор 508 детали идентифицирует деталь, собранную в объекте 102 с использованием экземпляра 500 производственного задания. В этом иллюстративном примере идентификатор 508 детали является номером этой детали. Например, идентификатор 508 детали может быть серийным номером, комбинацией серийного номера и идентификатора поставщика или каким-либо иным подходящим типом идентификации, который однозначно идентифицирует конкретную деталь и отличает ее от другой детали, даже если эти детали являются деталями одного типа.
[000109] В иллюстративных примерах идентификатор 508 детали может быть использован для выработки графического представления идентифицированных деталей. Например, идентификатор 508 детали может быть использован для размещения информации в модели, необходимой для выработки графического представления детали для отображения.
[000110] Место расположения 510 идентифицирует место расположения, в котором задача 505 должна быть выполнена. Это место расположения может быть в координатах для объекта 102 или какой-либо иной системе координат.
[000111] Инструкции 512 являются группой инструкций для выполнения задачи 505. В частности, указанная группа инструкций может быть для сборки группы деталей. Эти инструкции могут быть пошаговыми инструкциями, руководством или другими подходящими типами инструкций. Эти инструкции могут служить руководством для сборки деталей, проверки деталей или других подходящих операций, которые могут быть выполнены для задачи 505. Инструкции 512 также могут включать в себя планы места, в котором должна быть выполнена задача 505.
[000112] Как показано на чертежах, статус 518 обеспечивает информацию о выполнении задачи 505 для экземпляра 500 производственного задания. В этом иллюстративном примере статус может указывать, что работа должна быть выполнена, была завершена, находится в стадии выполнения, является неназначенной, была запланирована, приостановлена, была отменена или указывает на другой подходящий статус для экземпляра 500 производственного задания. Статус может быть указан с использованием текста, кодов, символов или других подходящих механизмов. Кроме того, если статус 518 указывает на то, что работа, подлежащая выполнению, была завершена, статус 518 также может включать в себя дату и время того, когда происходила работа по выполнению задачи 505.
[000113] Иллюстрации различных компонентов, которые могут быть использованы в производственной среде 100 по ФИГ. 1-5, не подразумевают физические или архитектурные ограничения способа, которым иллюстративный вариант реализации может быть реализован. Могут быть использованы другие компоненты в дополнение к проиллюстрированным компонентам или вместо них. Некоторые компоненты могут быть не нужны. Также, блоки представлены для иллюстрации функциональных компонентов. Один или более из этих блоков могут быть скомбинированы, разделены или скомбинированы и разделены на различные блоки при реализации в иллюстративном варианте реализации. Например, хотя иллюстративные примеры описаны по отношению к воздушному летательному аппарату, они могут применяться в отношении других объектов, отличных от воздушного летательного аппарата, таких как, например, без ограничения, транспортное средство, подводная лодка, боевая машина пехоты, танк, поезд, автомобиль, автобус, космический летательный аппарат, надводный корабль, спутник, ракета, двигатель, компьютер, уборочные машины, строительные подъемные краны, бульдозеры, горнодобывающее оборудование или иные подходящие типы объектов.
[000114] Со ссылкой на ФИГ. 6-9 показаны изображения графических пользовательских интерфейсов для идентифицирования статуса экземпляров производственных заданий в соответствии с иллюстративным вариантом реализации изобретения. Эти фигуры чертежей иллюстрируют способ, которым может быть реализован графический пользовательский интерфейс 208 по ФИГ. 2. Различные графические пользовательские интерфейсы могут быть отображены в системе отображения, такой как система 209 отображения по ФИГ. 2, и оператор может взаимодействовать с графическими пользовательскими интерфейсами с использованием системы ввода, такой как система 211 ввода по ФИГ. 2.
[000115] Со ссылкой на ФИГ. 6 показано изображение графического пользовательского интерфейса для просмотра статусов экземпляров производственных заданий в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере графический пользовательский интерфейс 600 отображает здания 602, включающие в себя здание 604, здание 606 и здание 608.
[000116] В этом конкретном примере каждое здание в зданиях 602 в графическом пользовательском интерфейсе 600 представляет собой место, в котором происходит изготовление воздушного летательного аппарата. Каждое здание может соответствовать базе данных воздушных летательных аппаратов, которые произведены внутри здания.
[000117] Со ссылкой на ФИГ. 7 показано изображение позиций воздушного летательного аппарата в здании в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере позиции 700 воздушного летательного аппарата отображают в графическом пользовательском интерфейсе 702. Эти позиции соответствуют задачам, которые могут быть выполнены на различных этапах сборки воздушного летательного аппарата.
[000118] В этом конкретном примере позиции 700 воздушного летательного аппарата включают в себя позицию 704, позицию 706, позицию 708, позицию 710, и позицию 712. В этих иллюстративных примерах определенные задачи выполнены в различных позициях в позициях 700 воздушного летательного аппарата. Иными словами, сборка воздушного летательного аппарата продвигается от позиции к позиции с добавлением различных деталей к воздушному летательному аппарату в различных позициях в позициях 700 воздушного летательного аппарата.
[000119] Выбор одной из этих позиций приводит к идентифицированию графических представлений для деталей, которые были установлены в конкретной позиции, а также любых деталей, которые могли быть установлены в предыдущей позиции. В результате, не представлены детали, которые не должны быть установлены в последующей позиции. Например, воздушный летательный аппарат в позиции 712 представляет собой полностью сконфигурированный воздушный летательный аппарат. Воздушный летательный аппарат в позиции 710 может не иметь кресел и коврового покрытия. Воздушный летательный аппарат в позиции 708 может не содержать плит, туалетов, бортовых кухонь и других частей. Эти различные позиции в позициях 700 воздушного летательного аппарата могут иметь различные условия сборки для воздушного летательного аппарата в этих иллюстративных примерах.
[000120] В этих иллюстративных примерах каждая из этих позиций может иметь модели, связанные с позицией. Эти модели могут содержать детали, которые присутствуют в воздушном летательном аппарате для конкретной позиции. В результате, выбор позиции приводит к получению выбора моделей, которые могут быть использованы для отображения графических представлений деталей. В результате, модели для позиций с меньшим количеством деталей могут быть опрошены быстрее для идентифицирования информации для выработки графических представлений деталей для воздушного летательного аппарата.
[000121] Кроме того, в этих иллюстративных примерах экземпляры производственных заданий в базе данных производственных заданий могут быть идентифицированы для каждой из позиций. Иными словами, каждая позиция может иметь базу данных производственных заданий, содержащую экземпляры производственных заданий, которые могут быть выработаны для этих конкретных позиций. В результате, позиции с меньшим количеством деталей имеют меньше экземпляров производственных заданий для отслеживания или управления. Таким образом, более быстрый опрос базы данных производственных заданий для конкретной позиции может быть выполнен, когда есть база данных для позиции с меньшим количеством деталей. После выбора этой позиции, оператор может выбирать секцию воздушного летательного аппарата для повторного осмотра.
[000122] Со ссылкой на ФИГ. 8 показано изображение графического пользовательского интерфейса секций воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере графический пользовательский интерфейс 800 отображает секции 802 для воздушного летательного аппарата в области 804 графического пользовательского интерфейса 800.
[000123] Как показано на чертежах, секционный вид 805 отображен в области 804 графического пользовательского интерфейса 800. Секционный вид 805 представляет собой пример одного варианта реализации для секционного вида 223, показанного в блочной форме на ФИГ. 2 и ФИГ. 3. В этом конкретном примере секционный вид 805 может быть выполнен для воздушного летательного аппарата в позиции 712 по ФИГ. 7.
[000124] Оператор может выбирать секцию из секций 802. Как показано на чертежах, секции 802 представляют собой примеры секций 300 по ФИГ. 3, как отображено в графическом пользовательском интерфейсе 800. Секции 802 являются выбираемыми в этом конкретном примере. Например, секция 803 в секциях 802 является выбираемой оператором в этих иллюстративных примерах. Секция 803 в этом примере является верхней цилиндрической деталью воздушного летательного аппарата.
[000125] В отношении возможности выбора, секции 802 могут включать в себя активные точки. Эти активные точки не видны в этом иллюстративном примере. Активные точки являются областями в графическом пользовательском интерфейсе 800, которые могут быть выбраны, чтобы вызвать действие. В этих иллюстративных примерах такие активные точки соответствуют секциям 802. Активные точки могут включать в себя секции 802 или могут находиться вокруг секций 802 или каким-либо образом сочетать указанное.
[000126] Кроме того, идентификацию деталей, присутствующих в указанной секции, выполняют также в ответ на выбор пользователем конкретной секции. Эта идентификация может включать в себя любые детали, которые представлены для конкретной позиции воздушного летательного аппарата в этой секции. Иными словами, одна и та же секция воздушного летательного аппарата в различных позициях может иметь различные детали, которые представлены на основе задач для установки деталей. Эта идентификация может быть выполнена посредством использования состояний 226 по ФИГ. 2.
[000127] В этом иллюстративном примере оператор также может выбирать для просмотра весь воздушный летательный аппарат посредством выбора всей области 808 воздушного летательного аппарата в графическом пользовательском интерфейсе 800. Иными словами, объем для отображения может представлять собой весь воздушный летательный аппарат. Кроме того, оператор может выбирать группы секций 802. Как показано на чертежах, выбор может быть выполнен посредством выбора одной области 810, области 812, области 814, области 816, области 818, и области 820 в графическом пользовательском интерфейсе 800. В этих иллюстративных примерах эти области имеют активные точки. Таким образом, оператор может просматривать различные участки воздушного летательного аппарата таким образом, который подходит конкретному запросу, который необходим оператору.
[000128] Со ссылкой на ФИГ. 9 показано еще одно изображение графического пользовательского интерфейса секций воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере графический пользовательский интерфейс 900 отображает секции 902 для воздушного летательного аппарата в области 904 графического пользовательского интерфейса 900.
[000129] Как показано на чертежах, секционный вид 905 отображен в области 904 графического пользовательского интерфейса 900. Секционный вид 905 является примером одного варианта реализации для секционного вида 223, показанного в блочной форме на ФИГ. 2 и ФИГ. 3. В этом конкретном примере секционный вид 905 может быть представлен для воздушного летательного аппарата в позиции 704 по ФИГ. 7.
[000130] В этом иллюстративном примере только участок воздушного летательного аппарата проиллюстрирован на виде секций 902 в секционном виде 905. Как показано на чертежах, в этом конкретном примере показаны только секции 902, которые присутствуют в конкретной позиции.
[000131] Кроме того, секции 902 также могут быть выбираемыми. Возможность выбора секций 902 может быть обеспечена посредством использования активных точек, связанных с секциями 902. В результате, выбор конкретной секции в секциях 902 может привести к отображению объема на основе модели воздушного летательного аппарата, содержащего выбранную секцию.
[000132] Как показано на чертежах, область 908, область 910 и 912 также являются выбираемыми. Эти области группируют секции 902. Эти области могут также иметь активные точки, связанные с ними. Выбор одной из этих областей приводит к получению объема, содержащего различные секции в пределах отображаемой области.
[000133] Изображение графического пользовательского интерфейса 600 со зданиями 602 по ФИГ. 6, графического пользовательского интерфейса 702 с позициями 700 воздушного летательного аппарата по ФИГ. 7, и графического пользовательского интерфейса 800 с секциями 802 по ФИГ. 8, и графического пользовательского интерфейса 900 с секциями 902 по ФИГ. 9 являются примерами многоуровневого контрольного опрашивания, которое может быть выполнено в соответствии с иллюстративным вариантом реализации изобретения. Как показано на чертежах, выбор здания из зданий 602 может выбирать конкретную модель для воздушного летательного аппарата. Эта конкретная модель может быть отображена с позициями с использованием графического пользовательского интерфейса 702. Выбор позиции может привести к получению еще одного вида, отображаемого с секциями 802 в графическом пользовательском интерфейсе 800 или секциями 902 в графическом пользовательском интерфейсе 900. Таким образом, оператор может легко просматривать модели различных воздушных летательных аппаратов, в зависимости от выбранной позиции.
[000134] Со ссылкой на ФИГ. 10 показано изображение объема, отображенного в ответ на выбор секции в соответствии с иллюстративным вариантом реализации изобретения. В этом показанном примере, графический пользовательский интерфейс 1000 отображает графические представления 1002 деталей 1004 в секции 803 по ФИГ. 8.
[000135] Как показано на чертежах, этот вид секции 803 первоначально может быть основан на точке зрения по умолчанию. Эта точка зрения может быть задана с использованием точки зрения 408 по ФИГ. 4. Из этого вида секции 803 оператор может просматривать секцию 803 множеством различных способов.
[000136] Например, оператор может выбирать графическое представление в графических представлениях 1002 для детали в деталях 1004 в секции 803. Выбор графического представления для детали может обеспечивать приближенный вид этой детали.
[000137] В другом иллюстративном примере графические представления 1002 деталей 1004 в секции 803 могут быть просмотрены с использованием команд 1006, отображенных в меню 1008. В этом иллюстративном примере команды 1006 включают в себя "верх" 1010, "низ" 1012, "бок" 1014 и "перспектива" 1016. Конечно, эти команды для различных видов являются только примерами и не предназначены, чтобы охватить все различные типы команды, которые могут быть использованы для просмотра графических представлений 1002 конкретных деталей в деталях 1004. Например, команды такие как "масштабирование", "панорамирование" и другие подходящие команды также могут быть представлены в дополнение к показанным в этом иллюстративном примере или вместо них.
[000138] Кроме того, в некоторых случаях идентификатор детали может быть введен в поле 1018 детали. При вводе идентификатора детали оператор может увидеть различные виды конкретной детали в деталях 1004. Кроме того, оператор может также выбирать команду для команд 1006, чтобы обеспечить конкретный вид детали.
[000139] Конечно, могут быть использованы другие процессы, чтобы видеть и просматривать графические представления 1002 деталей 1004 в секции 803. Эти другие процессы могут включать в себя те процессы, которые обычно используются с системой автоматизированного программного проектирования и другими типами программного обеспечения, в которых графические представления 1002 деталей 1004 могут быть увидены и просмотрены.
[000140] Изображения различных графических пользовательских интерфейсов по ФИГ. 6-10 представлены только в качестве примеров некоторых вариантов реализации графического пользовательского интерфейса 208 по ФИГ. 2. Эти примеры не предназначены для какого-либо ограничения способа, которым может быть реализован иллюстративный вариант. Например, хотя различные примеры отображены со ссылкой на воздушный летательный аппарат, схожие отображения могут быть использованы для других типов транспортных средств или объектов. Например, графические пользовательские интерфейсы могут быть выполнены с возможностью изображения для секций объектов, таких как автомобиль, морское судно, спутник, двигатель или другие подходящие типы объекта.
[000141] В качестве еще одного иллюстративного примера, отображение различных графических пользовательских интерфейсов может быть выполнено с использованием других графических пользовательских интерфейсов в дополнение к проиллюстрированным или вместо них. Кроме того, порядок графических пользовательских интерфейсов может отличаться от порядка, описанного выше.
[000142] Далее со ссылкой на ФИГ. 11 показано изображение структурной схемы процесса визуального контроля объекта в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере способ может быть использован для визуального контроля объекта, такого как воздушный летательный аппарат. Указанный процесс может быть реализован с использованием устройства 124 управления объектами по ФИГ. 1. В частности, один или более различных компонентов устройства 124 управления объектами, проиллюстрированных на ФИГ. 2, могут быть использованы для визуального контроля воздушного летательного аппарата.
[000143] Указанный процесс начинают с того, что идентифицируют модель для воздушного летательного аппарата (операция 1100). В иллюстративных примерах модель для воздушного летательного аппарата может быть идентифицирована множеством способов, как описано выше. Например, модель может быть идентифицирована посредством выбора модели из списка моделей. В других иллюстративных примерах модель может быть идентифицирована визуально с использованием графического пользовательского интерфейса, такого как графический пользовательский интерфейс 600 по ФИГ. 6.
[000144] Затем согласно процессу отображают секции воздушного летательного аппарата в графическом пользовательском интерфейсе на устройстве отображения (операция 1102), и процесс после этого заканчивают. Секции соответствуют секциям, произведенным для сборки воздушного летательного аппарата. Кроме того, секции также являются выбираемыми в иллюстративных примерах. Возможность выбирать эти секции могут обеспечивать посредством различных механизмов. В этом иллюстративном примере указанная возможность может быть обеспечена через активные точки, связанные с секциями, которые отображены в графическом пользовательском интерфейсе. Кроме того, секции отображают в разобранном виде при выполнении операции 1102.
[000145] Со ссылкой на ФИГ. 12 показано изображение структурной схемы процесса визуального контроля воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения. Этот процесс представляет собой пример способа, при котором оператор может визуально видеть различные детали воздушного летательного аппарата без необходимости знать координаты различных мест, в которых детали размещены. Различные операции, проиллюстрированные на ФИГ. 12, могут быть реализованы с использованием устройства 204 визуализации объектов по ФИГ. 2.
[000146] Указанный процесс начинают с того, что отображают графический пользовательский интерфейс с группой зданий в производственном сооружении (операция 1200). Графический пользовательский интерфейс включает в себя активные точки для зданий, которые могут быть выбраны. Активная точка представляет собой участок графического пользовательского интерфейса, который может быть выбран, чтобы вызвать действие. В этих иллюстративных примерах здания представляют собой активные точки, которые могут быть выбраны оператором.
[000147] Затем согласно процессу принимают ввод пользователя с выбором здания (операция 1202). В этом иллюстративном примере каждое здание может быть использовано для сборки конкретного воздушного летательного аппарата. Этот конкретный воздушный летательный аппарат может представлять собой конкретный тип воздушного летательного аппарата, такого как указанная модель. В некоторых случаях, более чем одно здание может быть использовано для сборки одного типа воздушного летательного аппарата, но конкретный воздушный летательный аппарат может быть конкретной сборки для клиента с конкретными вариантами. Иными словами, различные воздушные летательные аппараты одного и того же типа могут быть собраны в различных зданиях, которые имеют различные варианты, хотя они представляют собой один и тот же тип.
[000148] Далее идентифицируют модель воздушного летательного аппарата на основе выбора здания в указанной группе зданий в производственном сооружении (операция 1203). Идентифицируют позиции в здании (операция 1204). Каждое здание может иметь различные позиции для собираемого воздушного летательного аппарата. Кроме того, даже если здание имеет одни и те же позиции, статус воздушного летательного аппарата в конкретном здании в конкретных позициях может отличаться от других зданий. Кроме того, даже с использованием одних и тех же позиций могут быть собраны различные воздушные летательные аппараты в указанных позициях в различных зданиях.
[000149] Позиции отображают в графическом пользовательском интерфейсе (операция 1206). В этих иллюстративных примерах различные позиции являются активными точками, которые могут быть выбраны посредством ввода пользователя, осуществляемого оператором. Затем согласно процессу принимают ввод пользователя для выбора позиции.
[000150] Далее согласно процессу идентифицируют секционный вид для воздушного летательного аппарата на основе выбора позиции (операция 1208). В этом иллюстративном примере каждая позиция может иметь отличный секционный вид, который может быть отображен. Секции воздушного летательного аппарата в позиции являются секциями, произведенными в выбранной позиции в этих иллюстративных примерах. Секционный вид включает в себя секции для этой конкретной позиции.
[000151] Как показано на чертежах, секционный вид может представлять собой, например, секционный вид 223 в секционных видах 224. В этом иллюстративном примере представлены различные секционные виды для различных позиций. Секционный вид 805 по ФИГ. 8 и секционный вид 905 по ФИГ. 9 являются примерами секционных видов, которые могут быть выбраны в зависимости от позиции, выбранной для воздушного летательного аппарата при выполнении операции 1208.
[000152] В этих иллюстративных примерах секционные виды были выбраны для деталей, которые присутствуют в воздушном летательном аппарате для указанной позиции. Они являются деталями, которые могут остаться от сборки воздушного летательного аппарата в предыдущей позиции или могут являться деталями, которые необходимо собрать в выбранной позиции.
[000153] Затем согласно процессу отображают секции воздушного летательного аппарата (операция 1210). При выполнении операции 1210 секции отображают на секционном виде воздушного летательного аппарата. Кроме того, различные секции отображают вместе с активными точками, которые могут быть выбраны посредством ввода пользователя, вводимого оператором. Затем согласно процессу выявляют выбор секции из секций, отображенных в графическом пользовательском интерфейсе (операция 1212). При выполнении операции 1212 секция имеет активные точки, связанные с идентификатором объема. Выбор секции воздушного летательного аппарата включает выбор активной точки, связанной с воздушным летательным аппаратом. Активная точка указывает на идентификатор объема, такой как идентификатор 222 объема по ФИГ. 2. В некоторых случаях активная точка может быть ссылкой, указывающей на идентификатор объема. Например, активная точка может быть индексом, используемым для идентифицирования идентификатора объема.
[000154] Затем согласно процессу идентифицируют объем в модели, соответствующей секции, выбранной из секций, отображенных в графическом пользовательском интерфейсе (операция 1214). В этих иллюстративных примерах каждая секция воздушного летательного аппарата связана с объемом для воздушного летательного аппарата. Этот объем идентифицируют на основе идентификаторов объема, связанных с секциями в этом секционном виде, с использованием идентификатора объема, указанным активной точкой, выбранной для секции. Идентификатор объема может включать в себя информацию, определяющую указанный объем. Например, идентификатор 222 объема может включать в себя дескриптор 402 объема, как показано на чертежах на ФИГ. 4. В частности, идентификатор может включать в себя группу координат, определяющих объем в указанной модели.
[000155] Затем согласно процессу отображают указанную секцию в графическом пользовательском интерфейсе с использованием объема в модели, идентифицированной для выбранной секции (операция 1218). Далее выполняют определение того, выбрана ли новая секция воздушного летательного аппарата для указанной позиции воздушного летательного аппарата (операция 1220). Если выбрана любая секция, то согласно процессу возвращаются к операции 1210, как описано выше.
[000156] Если новая секция не выбрана, выполняют определение того, выбрана ли новая позиция для воздушного летательного аппарата (операция 1222). Если выбрана новая позиция, то согласно процессу возвращаются к операции 1208, как описано выше. Если новая позиция не выбрана, согласно процессу определяют, выбрано ли новое здание (операция 1224). Если выбрано новое здание, согласно процессу возвращаются к операции 1204. В противном случае, согласно процессу выполняют операцию, выбранную оператором (операция 1226), затем согласно процессу возвращаются к операции 1218. При выполнении операции 1226 оператор может поворачивать детали, отображенные в указанном объеме, увеличивать изображение, перемещать детали, комментировать детали или выполнять другие операции в отношении деталей, отображенных в указанном объеме.
[000157] Структурные схемы и блок-схемы в различных изображенных вариантах реализации изобретения иллюстрируют архитектуру, функциональность и работу некоторых возможных вариантов осуществления устройств и способов в иллюстративном варианте реализации изобретения. В этой связи, каждый блок в структурных схемах или блок-схемах может представлять модуль, сегмент, функцию и/или часть операции или этапа. Например, один или большее количество блоков могут быть реализованы в виде программного кода, в аппаратных средствах или комбинации программного кода и аппаратных средств. При реализации в аппаратных средствах они могут, например, принимать форму интегральных схем, которые произведены или выполнены с возможностью выполнения одной или более операций в структурных схемах или блок-схемах. При реализации в виде комбинации программного кода и аппаратных средств реализация может принимать форму программно-аппаратных средств (firmware).
[000158] В некоторых альтернативных реализациях иллюстративного варианта изобретения, функция или функции, описанные в блоках, могут иметь место не в том порядке, который показан на фигурах чертежей. Например, в некоторых случаях, два блока, показанные последовательно, могут быть выполнены по существу одновременно, или блоки иногда могут быть выполнены в обратном порядке, в зависимости от используемой функциональности. Также, другие блоки могут быть добавлены в дополнение к блокам, показанным в структурной схеме или блок-схеме.
[000159] В одном иллюстративном примере секции могут быть не отображены в разобранном виде при выполнении операции 1202. Вместо этого, секции могут быть отображены в виде целого воздушного летательного аппарата, в котором различные секции могут быть выбраны через активные точки. Различные секции могут быть указаны с использованием линий или других графических индикаторов в этом типе осуществления.
[000160] Со ссылкой на ФИГ. 13 показана блок-схема системы обработки данных в соответствии с иллюстративным вариантом реализации изобретения. Система 1300 обработки данных может быть использована для реализации компьютерной системы 126 по ФИГ. 1. В этом иллюстративном примере система 1300 обработки данных включает в себя инфраструктуру 1302 связи, которая обеспечивает сообщение между процессорным блоком 1304, запоминающим устройством 1306, устройством 1308 постоянного хранения, блоком 1310 связи, блоком 1312 ввода/вывода (I/O) и дисплеем 1314. В этом примере инфраструктура связи может быть реализована в качестве системы на основе шины.
[000161] Процессорный блок 1304 служит для выполнения команд для программного обеспечения, которое может быть загружено в запоминающее устройство 1306. Процессорный блок 1304 может представлять собой множество процессоров, мультипроцессорное ядро или некоторые другие типы процессора, в зависимости от конкретной реализации.
[000162] Запоминающее устройство 1306 и устройство 1308 постоянного хранения являются примерами устройств 1316 хранения. Устройство хранения представляет собой любую часть аппаратных средств, которые выполнены с возможностью сохранения информации, такой как, например, без ограничения, данные, программный код в функциональной форме и/или иная подходящая информация на постоянной и/или временной основе. Устройства хранения в этих иллюстративных примерах могут также называться компьютерочитаемыми устройствами хранения. Запоминающее устройство 1306 в этих примерах может представлять собой, например, оперативное запоминающее устройство или любое иное подходящее энергозависимое или энергонезависимое устройство хранения. Устройство 1308 постоянного хранения может быть выполнено в различных формах, в зависимости от конкретной реализации.
[000163] Например, устройство 1308 постоянного хранения может содержать один или большее количество компонентов или устройств. Например, устройство 1308 постоянного хранения может представлять жесткий диск, флэш-память, перезаписываемый оптический диск, перезаписываемую магнитную ленту или какую-либо комбинацию указанного выше. Носители, используемые устройством 1308 постоянного хранения, также могут быть съемными. Например, съемный жесткий диск может быть использован для устройства 1308 постоянного хранения.
[000164] Блок 1310 связи в этих иллюстративных примерах обеспечивает сообщение с другими системами или устройствами обработки данных. В этих иллюстративных примерах блок 1310 связи представляет собой сетевую интерфейсную плату.
[000165] Блок 1312 ввода/вывода обеспечивает возможность ввода и вывода данных другими устройствами, которые могут быть соединены с системой 1300 обработки данных. Например, блок 1312 ввода/вывода может обеспечивать соединение для ввода пользователя с помощью клавиатуры, мыши и/или какого-либо иного подходящего устройства ввода. Кроме того, блок 1312 ввода/вывода может отправлять выходные данные на принтер. Дисплей 1314 обеспечивает механизм отображения информации для пользователя.
[000166] Команды для операционной системы, приложений и/или программ могут быть расположены в устройствах 1316, хранения, которые сообщаются с процессорным блоком 1304 через инфраструктуру 1302 связи. Процессы различных вариантов реализации могут быть выполнены процессорным блоком 1304 с использованием машино-исполняемых команд, которые могут быть расположены в запоминающем устройстве, таком как запоминающее устройство 1306.
[000167] Эти команды могут быть упомянуты как программный код, используемый вычислительным устройством, программный код или компьютерочитаемый программный код и могут быть считаны или исполнены процессором в процессорном блоке 1304. Программный код в различных вариантах реализации может быть реализован на физическом или компьютерочитаемом носителе для хранения, таком как запоминающее устройство 1306 или устройство 1308 постоянного хранения.
[000168] Программный код 1318 находится в функциональной форме на компьютерочитаемом носителе 1320, который выполнен с возможностью съема по выбору и может быть загружен или перемещен в систему 1300 обработки данных для выполнения процессорным блоком 1304. Программный код 1318 и компьютерочитаемый носитель 1320 в этих иллюстративных примерах формируют компьютерный программный продукт 1322.
[000169] В одном примере компьютерочитаемый носитель 1320 может представлять собой компьютерочитаемый носитель 1324 для хранения данных или компьютерочитаемый носитель 1326 для сигнала. В этих иллюстративных примерах компьютерочитаемый носитель 1324 для хранения данных является физическим или материальным устройством хранения, используемым для хранения программного кода 1318, а не средством распространения или передачи программного кода 1318.
[000170] В альтернативном варианте реализации изобретения программный код 1318 может быть передан в систему 1300 обработки данных с использованием компьютерочитаемого носителя 1326. Компьютерочитаемый носитель 1326 сигнала может представлять собой, например, распространяемый сигнал данных, содержащий программный код 1318. Например, компьютерочитаемый носитель 1326 для сигнала может быть электромагнитным сигналом, оптическим сигналом и/или каким-либо иным подходящим типом сигнала. Эти сигналы могут быть переданы посредством линий связи, таких как беспроводные линии связи, оптико-волоконный кабель, коаксильный кабель, провод и/или линия связи любого иного подходящего типа.
[000171] Различные компоненты, проиллюстрированные для системы 1300 обработки данных, не предназначены для наложения архитектурных ограничений на способ, которым варианты изобретения могут быть реализованы. Указанные различные иллюстративные варианты реализации изобретения могут быть реализованы в системе обработки данных, которая включает в себя компоненты в дополнение и/или вместо тех, которые показаны в виде иллюстраций для системы 1300 обработки данных. Другие компоненты, изображенные на ФИГ. 13, могут отличаться от показанных иллюстративных примеров. Различные варианты реализации могут быть реализованы с использованием любого устройства, выполненного на основе аппаратных средств, или системы, выполненной с возможностью запуска программного кода 1318.
[000172] Иллюстративные варианты реализации настоящего изобретения могут быть описаны в контексте способа 1400 производства и обслуживания воздушного летательного аппарата, как показано на ФИГ. 14, и воздушного летательного аппарата 1500, как показано на ФИГ. 15. Со ссылкой на ФИГ. 14 показана иллюстрация способа производства и обслуживания воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения. Во время предпроизводственного этапа способ 1400 производства и обслуживания воздушного летательного аппарата может включать в себя разработку спецификации и проектирование 1402 воздушного летательного аппарата 1500 по ФИГ. 15 и материальное снабжение.
[000173] Во время производства выполняют процесс 1406 производства компонентов и сборочных узлов и системную интеграцию 1408 воздушного летательного аппарата 1500 по ФИГ. 15. После этого воздушный летательный аппарат 1500 по ФИГ. 15 может пройти через стадию 1400 сертификации и поставки для постановки на обслуживание 1412. При эксплуатации 1412 заказчиком воздушный летательный аппарат 1500 по ФИГ. 15 подпадает под регламентное техобслуживание и текущий ремонт 1414, который может включать в себя модернизацию, перенастройку, переоборудование и иные техобслуживание и текущий ремонт.
[000174] Каждый из процессов способа 1400 производства и обслуживания воздушного летательного аппарата может быть выполнен или осуществлен системным интегратором, третьей стороной и/или оператором. В этих примерах оператором может быть заказчик. Для целей данного описания системный интегратор может включать в себя, без ограничения, любое количество производителей воздушных летательных аппаратов и субподрядчиков по основным системам; третья сторона может включать в себя, без ограничения, любое количество продавцов, субподрядчиков и поставщиков, а оператор может представлять собой авиакомпанию, лизинговую компанию, военную организацию, обслуживающую организацию и т.д.
[000175] Со ссылкой на ФИГ. 15 показано изображение воздушного летательного аппарата, в котором может быть реализован иллюстративный вариант реализации изобретения. В этом примере воздушный летательный аппарат 1500 изготовлен способом 1400 производства и обслуживания воздушного летательного аппарата по ФИГ. 14 и может включать в себя корпус 1502 с системами 1504 и внутренней частью 1506. Примеры систем включают в себя одно или большее количество из следующего: двигательная установка 1508, электрическая система 1510 гидравлическая система 1512 и система 1514 управления условиями окружающей среды. Может быть включено любое количество других систем. Хотя показан пример, относящийся к аэрокосмической промышленности, принципы изобретения могут быть применены в других отраслях промышленности, например, при изготовлении автомобилей.
[000176] Устройства и способы, реализуемые в настоящем документе, могут быть применены во время по меньшей мере одного из этапов способа 1400 производства и обслуживания воздушного летательного аппарата по ФИГ. 14. Например, один или более иллюстративных вариантов осуществления изобретения могут быть реализованы во время системной интеграции 1408. Различные иллюстративные примеры могут быть реализованы для идентифицирования информации для выполнения задач для сборки деталей на воздушном летательном аппарате 1500.
[000177] В частности, визуальный контроль воздушного летательного аппарата может быть использован для идентифицирования мест расположения, в которых должны быть выполнены задачи для экземпляров производственных заданий или в которых задачи были выполнены. Кроме того, иллюстративный вариант реализации также может быть реализован во время регламентного техобслуживания и текущего ремонта 1414. Например, информация о воздушном летательном аппарате может быть визуально запрошена и просмотрена оператором для выполнения задач для сборки деталей для технического обслуживания, модернизации, реконструкции, и другие операции во время регламентного техобслуживания и текущего ремонта 1414 могут быть идентифицированы с использованием иллюстративного варианта реализации изобретения.
[000178] Со ссылкой на ФИГ. 16 показано изображение производственной системы в соответствии с иллюстративным вариантом реализации изобретения. Производственная система 1600 является системой на основе физических аппаратных средств и выполнена с возможностью производства продуктов, таких как воздушный летательный аппарат 1500 по ФИГ. 15.
[000179] Как показано на чертежах, производственная система 1600 включает в себя производственное оборудование 1602. Производственное оборудование 1602 включает в себя по меньшей мере одно из изготовительного оборудования 1604 или сборочного оборудования 1606.
[000180] Изготовительное оборудование 1604 является оборудованием, которое может быть использовано для изготовления компонентов для деталей, используемых для формирования воздушного летательного аппарата 1500. Например, изготовительное оборудование 1604 может включать в себя машины и инструменты. Эти машины и инструменты могут представлять собой по меньшей мере одно из следующего: сверлильный станок, гидравлический пресс, печь, пресс-форма, машина для выкладки композитной ленты, вакуумная система, токарный станок или другие подходящие типы оборудования. Изготовительное оборудование 1604 может быть использовано для изготовления по меньшей мере одного из металлических деталей, композитных деталей, полупроводников, схем, крепежных элементов, нервюр, панелей обшивки, лонжеронов, антенн, деталей наподобие зева (pharynx) или других подходящих типов деталей.
[000181] Сборочное оборудование 1606 является оборудованием, используемым для сборки деталей для формирования воздушного летательного аппарата 1500. В частности, сборочное оборудование 1606 может быть использовано для сборки компонентов и деталей для формирования воздушного летательного аппарата 1500. Сборочное оборудование 1606 также может включать в себя машины и инструменты. Эти машины и инструменты могут представлять собой по меньшей мере одно из роботизированной руки, машины на гусеничном ходу, системы быстрой установки, сверлильной системы на рельсах или робота. Сборочное оборудование 1606 может быть использовано для сборки деталей, таких как кресла, горизонтальные стабилизаторы, крылья, двигатели, корпуса двигателя, системы шасси и других деталей для воздушного летательного аппарата 1500.
[000182] Производственная система 1600 также включает в себя управляющую систему 1608. Управляющая система 1608 является системой на основе аппаратных средств и также может включать в себя программное обеспечение или другие типы компонентов. Управляющая система 1608 выполнена с возможностью управления работой производственного оборудования 1602. Управляющая система 1608 может быть реализована с использованием аппаратных средств. Аппаратные средства могут включать в себя компьютеры, схемы, сети и другие типы оборудования. Управление может осуществляться в форме прямого управления производственным оборудованием 1602. Например, роботы, управляемые компьютером машины и другое оборудование могут управляться управляющей системой 1608. В других иллюстративных примерах управляющая система 1608 может управлять операциями, выполняемыми являющимися людьми операторами 1610 при производстве воздушного летательного аппарата 1500.
[000183] В этих иллюстративных примерах устройство 124 управления объектами по ФИГ. 1 может быть реализовано в управляющей системе 1608 для управления производством воздушного летательного аппарата 1500 по ФИГ. 15.
[000184] В различных иллюстративных примерах являющиеся людьми операторы 1610 могут работать или взаимодействовать по меньшей мере с одним из производственного оборудования 1602 или управляющей системой 1608. Это взаимодействие может быть осуществлено для производства воздушного летательного аппарата 1500.
[000185] Конечно, производственная система 1600 может быть выполнена с возможностью производства других продуктов. Хотя производственная система 1600 была описана в отношении производства в аэрокосмической промышленности, производственная система 1600 может быть выполнена с возможностью производства продуктов для других отраслей промышленности. Например, производственная система 1600 может быть выполнена с возможностью изготовления продуктов для автомобильной промышленности, а также для любых других подходящих отраслей промышленности.
[000186] Таким образом, операторы могут визуализировать информацию о воздушном летательном аппарате с использованием графического пользовательского интерфейса. Эта визуализация может быть выполнена в цеху операторами, которые могут не иметь опыта и подготовки для работы с системой автоматизированного программного проектирования. Этот визуальный контроль обеспечивает оператору возможность визуально наблюдать за воздушным летательным аппаратом или другим объектом.
[000187] Визуализация может быть выполнена без необходимости для операторов знать координаты мест расположения в воздушном летательном аппарате. В этих иллюстративных примерах графический пользовательский интерфейс отображает графические представления воздушного летательного аппарата, которые обеспечивают операторам возможность видеть различные участки воздушного летательного аппарата без использования координат, чтобы просматривать виды воздушного летательного аппарата.
Дальнейшие альтернативные конструкции также описаны в соответствии со следующими пунктами:
Пункт 1. Производственная система (1500), включающая в себя
производственное оборудование (1502), выполненное с возможностью производства воздушного летательного аппарата (104);
управляющую систему (1508), выполненную с возможностью управления производством воздушного летательного аппарата (104);
и устройство (124) управления объектами в управляющей системе (1508), при этом
устройство (124) управления объектами выполнено с возможностью идентифицирования модели (216) для воздушного летательного аппарата (104), отображения секций (136) воздушного летательного аппарата (104) в графическом пользовательском интерфейсе (208) на устройстве отображения, и управления сборкой воздушного летательного аппарата (104) с использованием производственного оборудования (1502) на основе секций (136), отображенных на устройстве отображения, причем
секции (136) соответствуют секциям (136), произведенным для сборки воздушного летательного аппарата (104), и секции (136) являются выбираемыми.
Пункт 2. Производственная система (1500) по пункту 1, в которой, поскольку устройство (124) управления объектами выполнено с возможностью управления сборкой воздушного летательного аппарата (104) на основе секций (136), отображенных на устройстве отображения, устройство (124) управления объектами выполнено с возможностью управления задачами, выполняемыми в отношении деталей для сборки воздушного летательного аппарата (104) на основе секций (136), отображенных на устройстве отображения.
Пункт 3. Производственная система (1500) по пункту 1, в которой графический пользовательский интерфейс (208) отображает графические представления воздушного летательного аппарата (104) для визуализации различных участков воздушного летательного аппарата (104) без использования координат, чтобы просматривать виды воздушного летательного аппарата (104).
Пункт 4. Производственная система по пункту 1, в которой устройство (124) управления объектами дополнительно выполнено с возможностью выявления выбора секции (304) из секций (136), отображенных в графическом пользовательском интерфейсе (208); идентифицирования объема (219) в модели (216), соответствующей секции, выбранной из секций (136), отображенных в графическом пользовательском интерфейсе (208); и отображения указанной секции в графическом пользовательском интерфейсе (208) с использованием объема (219) в модели (216), идентифицированной для выбранной секции.
Пункт 5. Производственная система (1500) по пункту 4, в которой объем (219) идентифицируют на основе секционного вида (223) воздушного летательного аппарата (104) и идентификаторов (221) объема для указанного секционного вида (223).
Пункт 6. Производственная система (1500) по пункту 5, в которой идентификатор (222) объема в идентификаторах (221) объема содержит группу координат (406), определяющих объем (219) в модели (216).
Пункт 7. Производственная система (1500) по пункту 6, в которой секция имеет активную точку (306), связанную с идентификатором (222) объема.
Пункт 8. Производственная система (1500) по пункту 1, в которой секции (136) отображают в разобранном виде.
Пункт 9. Способ производства воздушного летательного аппарата (104), согласно которому
идентифицируют (1000) модель (216) для воздушного летательного аппарата (104);
отображают (1002) секции (136) воздушного летательного аппарата (104) в графическом пользовательском интерфейсе (208) на устройстве отображения в качестве визуальной информации о воздушном летательном аппарате (104); и
управляют сборкой воздушного летательного аппарата (104) на основе секций (136), отображенных на устройстве отображения, причем
секции (136) соответствуют секциям (136), произведенным для сборки воздушного летательного аппарата (104), и секции (136) являются выбираемыми.
Пункт 10. Способ по пункту 9, в котором этап управления включает операции, согласно которым:
управляют задачами, выполняемыми в отношении деталей для сборки воздушного летательного аппарата (104) на основе секций (136), отображенных на устройстве отображения.
Пункт 11. Способ по пункту 9, согласно которому дополнительно
выявляют (1112) выбор секции (304) из секций (136), отображенных в графическом пользовательском интерфейсе (208);
идентифицируют (1000) объем (219) в модели (216), соответствующей секции, выбранной из секций (136), отображенных в графическом пользовательском интерфейсе (208); и
отображают (1002) указанную секцию в графическом пользовательском интерфейсе (208) с использованием объема (219) в модели (216), идентифицированной для выбранной секции.
Пункт 12. Способ по пункту 11, в котором объем (219) идентифицируют на основе секционного вида (223) воздушного летательного аппарата (104) и идентификаторов (221) объема для указанного секционного вида (223).
Пункт 13. Способ по пункту 12, в котором идентификатор (222) объема в идентификаторах (221) объема содержит группу координат (406), определяющих объем (219) в модели (216).
Пункт 14. Способ по пункту 13, в котором секция имеет активную точку (306), связанную с идентификатором (222) объема.
Пункт 15. Способ по пункту 9, в котором секции (136) отображают в разобранном виде.
Пункт 16. Способ по пункту 9, в котором секции (136) отображают на секционном виде (223) воздушного летательного аппарата (104).
Пункт 17. Способ по пункту 9, в котором идентифицирование (1000) модели (216) для воздушного летательного аппарата (104) включает в себя отображение (1002) группы зданий в производственном сооружении;
и идентифицируют (1000) модель (216) для воздушного летательного аппарата (104) на основе выбора здания в указанной группе зданий в производственном сооружении.
Пункт 18. Способ по пункту 9, согласно которому дополнительно отображают (1002) позиции для сборки воздушного летательного аппарата (104);
и идентифицируют (1000) секции (136) воздушного летательного аппарата (104) на основе выбора позиции воздушного летательного аппарата (104) из отображенных позиций.
Пункт 19. Способ по пункту 18, в котором секции (136) воздушного летательного аппарата (104) в указанной позиции являются секциями (136), произведенными в выбранной позиции.
Описание различных иллюстративных вариантов реализации изобретения было представлено в целях иллюстрации и это описание не является исчерпывающим или ограничивающимся раскрытыми формами реализации настоящего изобретения. Многие модификации и изменения будут очевидны специалистам в данной области техники. Кроме того, различные иллюстративные варианты реализации изобретения могут обеспечивать различные признаки по сравнению с другими иллюстративными вариантами реализации изобретения. Вариант или варианты реализации изобретения выбраны и описаны для того, чтобы лучше объяснить принципы его осуществления, практического применения и дать представление о различных вариантах с различными модификациями, которые подходят для конкретного использования изобретения другими специалистам в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРОВЕРКИ ЛЕТАТЕЛЬНОГО АППАРАТА С ВИЗУАЛИЗАЦИЕЙ И ЗАПИСЬЮ | 2018 |
|
RU2760755C2 |
| ПОРТАТИВНАЯ НАЗЕМНАЯ СИСТЕМА ДИФФЕРЕНЦИАЛЬНОЙ КОРРЕКЦИИ | 2015 |
|
RU2684134C2 |
| СИСТЕМА ПРОГРАММИРОВАНИЯ КОМПОНЕНТОВ | 2012 |
|
RU2611004C2 |
| УПРАВЛЕНИЕ ИНФОРМАЦИЕЙ О КОМПОНЕНТЕ В ТЕЧЕНИЕ ЖИЗНЕННОГО ЦИКЛА КОМПОНЕНТА | 2014 |
|
RU2661285C2 |
| СБОРКА КОНСТРУКТИВНОГО УЗЛА ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА БЕЗ РЕГУЛИРОВОЧНЫХ ПРОКЛАДОК, УСТАНОВОЧНЫХ ПРИСПОСОБЛЕНИЙ ИЛИ СВЕРЛИЛЬНЫХ КОНДУКТОРОВ, ПРИМЕНЯЕМЫХ ДЛЯ ПОЛУЧЕНИЯ ГОТОВЫХ ОТВЕРСТИЙ НЕОБХОДИМОГО РАЗМЕРА | 2016 |
|
RU2703377C2 |
| УСТРОЙСТВО И СПОСОБ МОЛЕКУЛЯРНОГО ПОСТРОЕНИЯ ИЗОБРАЖЕНИЯ | 2007 |
|
RU2443019C2 |
| Универсальная автоматизированная сборочная система | 2024 |
|
RU2838822C1 |
| ОТОБРАЖЕНИЕ МОДЕЛИ ФАЙЛОВОЙ СИСТЕМЫ В ОБЪЕКТ БАЗЫ ДАННЫХ | 2006 |
|
RU2409847C2 |
| СИСТЕМА И МЕТОД АВТОМАТИЧЕСКОГО СОЗДАНИЯ ШАБЛОНОВ | 2018 |
|
RU2697647C1 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ В СИСТЕМАХ ВОЗДУШНОГО ДВИЖЕНИЯ | 2018 |
|
RU2762151C2 |

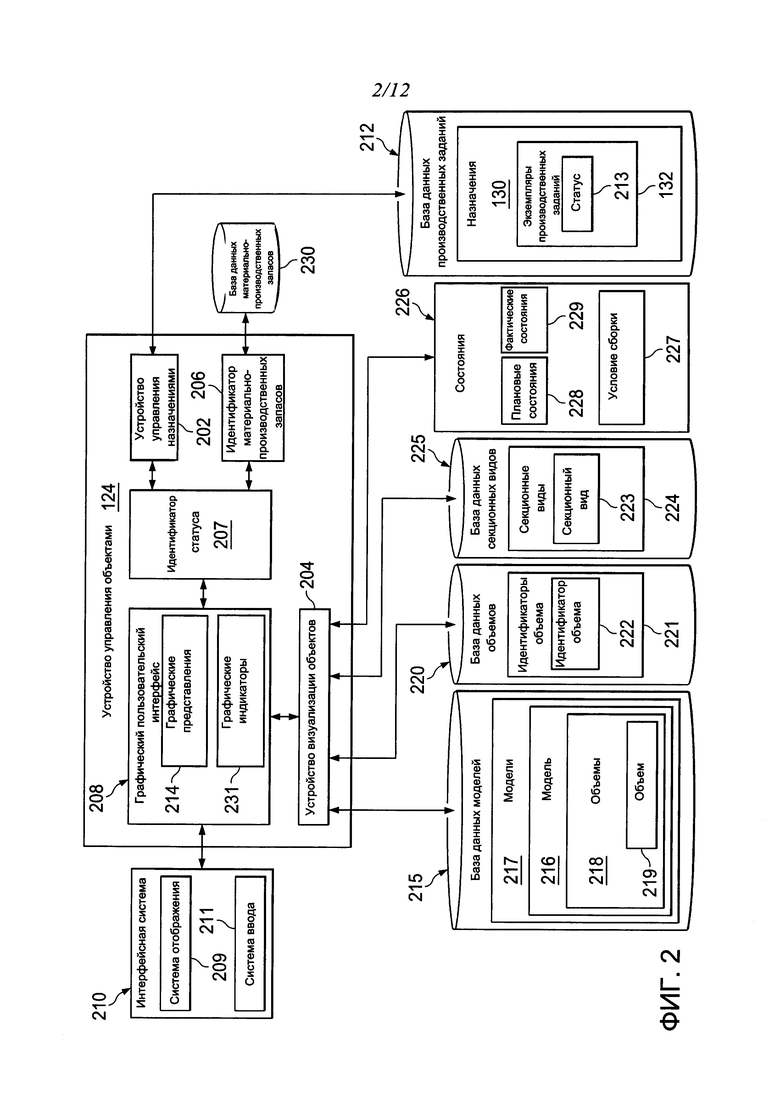
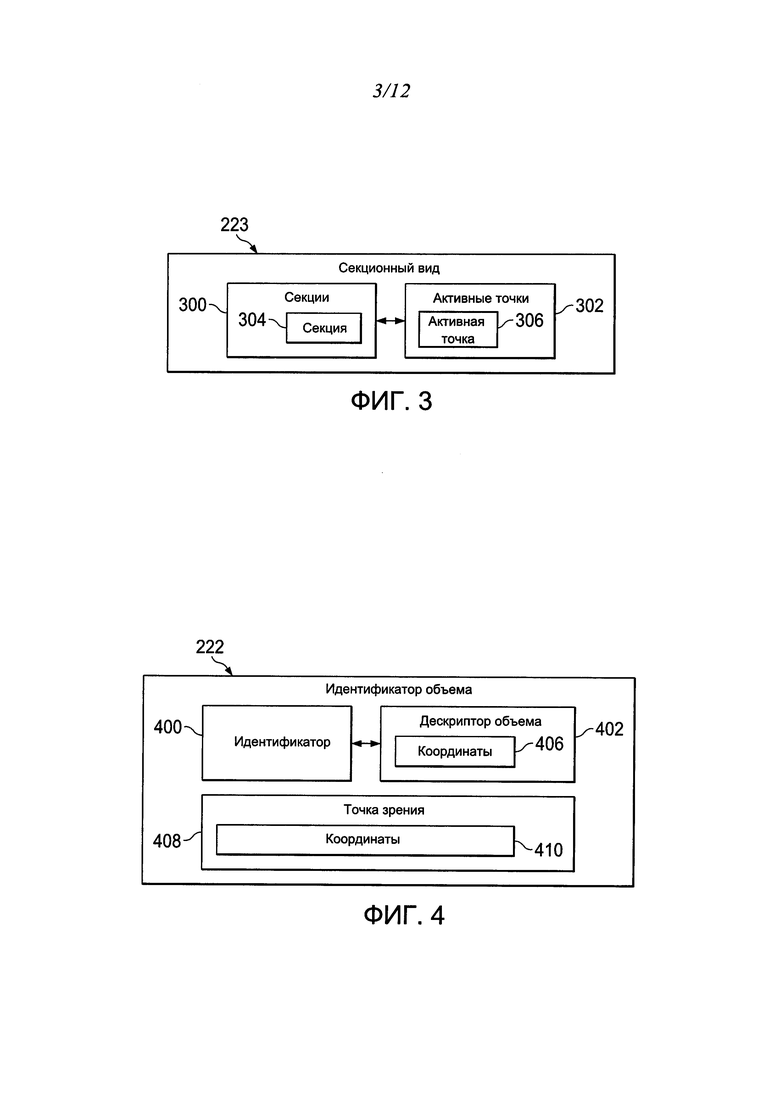

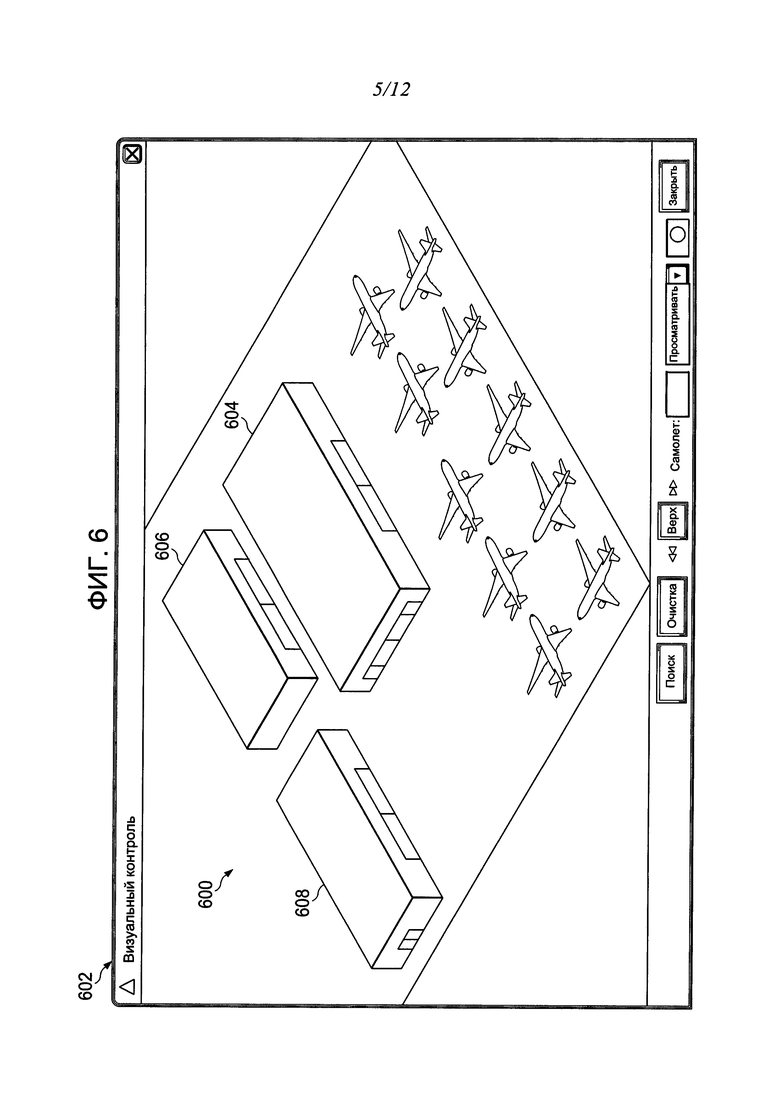







Группа изобретений относится к производственной системе и способу производства воздушного летательного аппарата (ЛА). Производственная система содержит производственное оборудование для производства ЛА, управляющую систему, устройство управления объектами в управляющей системе. Устройство управления объектами содержит устройство отображения выбираемых секций для сборки ЛА. Для производства ЛА идентифицируют модель ЛА, отображают секции ЛА в графическом пользовательском интерфейсе на устройстве отображения, управляют сборкой ЛА на основе отображаемых секций, соответствующих деталям ЛА. Обеспечивается уменьшение времени на сборку ЛА и уменьшение времени на обучение операторов. 2 и 12 з.п. ф-лы, 16 ил.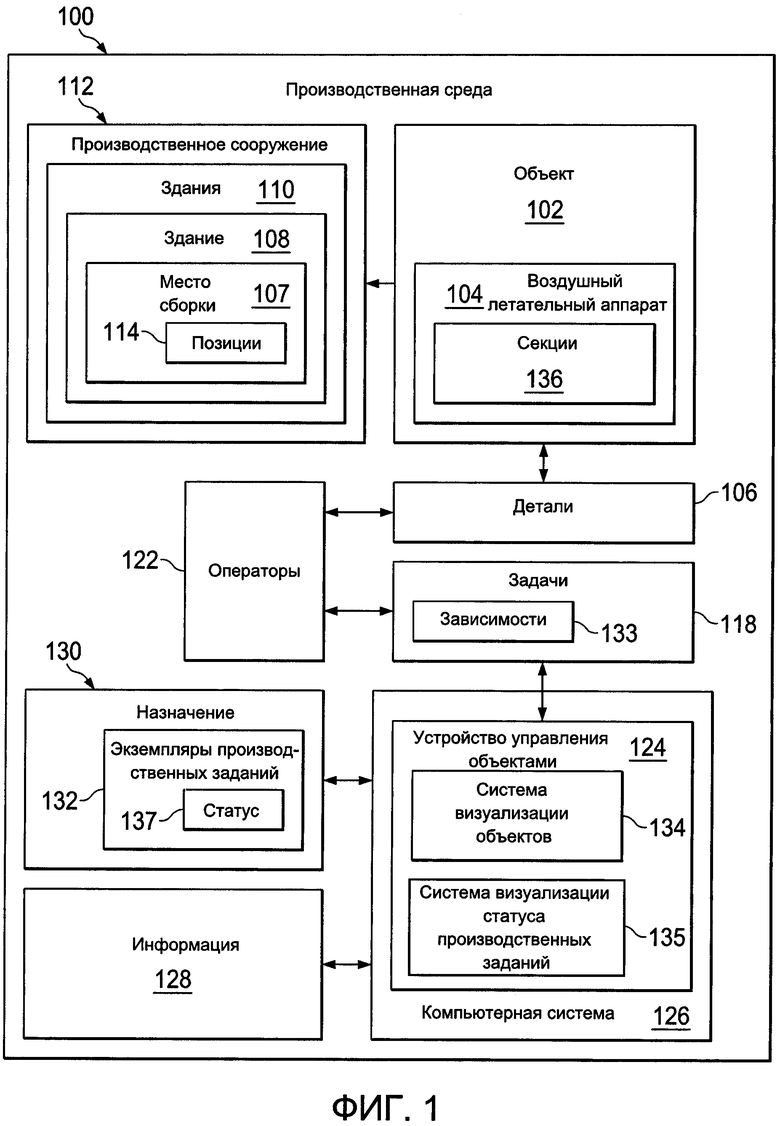
1. Производственная система (1500), содержащая:
производственное оборудование (1502), выполненное с возможностью производства воздушного летательного аппарата (104);
управляющую систему (1508), выполненную с возможностью управления производством воздушного летательного аппарата (104); и
устройство (124) управления объектами в управляющей системе (1508), при этом устройство (124) управления объектами выполнено с возможностью идентифицирования модели (216) для воздушного летательного аппарата (104), отображения секций (136) воздушного летательного аппарата (104) в графическом пользовательском интерфейсе (208) на устройстве отображения и управления сборкой воздушного летательного аппарата (104) с использованием производственного оборудования (1502) на основе секций (136), отображенных на устройстве отображения, причем
секции (136) соответствуют секциям (136), произведенным для сборки воздушного летательного аппарата (104), и секции (136) являются выбираемыми.
2. Производственная система (1500) по п. 1, в которой, поскольку устройство (124) управления объектами выполнено с возможностью управления сборкой воздушного летательного аппарата (104) на основе секций (136), отображенных на устройстве отображения, устройство (124) управления объектами выполнено с возможностью управления задачами, выполняемыми в отношении деталей для сборки воздушного летательного аппарата (104) на основе секций (136), отображенных на устройстве отображения.
3. Производственная система (1500) по п. 1, в которой графический пользовательский интерфейс (208) отображает графические представления воздушного летательного аппарата (104) для визуализации различных участков воздушного летательного аппарата (104) без использования координат, чтобы просматривать виды воздушного летательного аппарата (104).
4. Производственная система по п. 1, в которой
устройство (124) управления объектами дополнительно выполнено с возможностью выявления выбора секции (304) из секций (136), отображенных в графическом пользовательском интерфейсе (208);
идентифицирования объема (219) в модели (216), соответствующей секции, выбранной из секций (136), отображенных в графическом пользовательском интерфейсе (208);
и отображения указанной секции в графическом пользовательском интерфейсе (208) с использованием объема (219) в модели (216), идентифицированной для выбранной секции;
причем объем (219) идентифицирован на основе секционного вида (223) воздушного летательного аппарата (104) и идентификаторов (221) объема для указанного секционного вида (223).
5. Производственная система (1500) по п. 4, в которой идентификатор (222) объема в идентификаторах (221) объема содержит группу координат (406), определяющих объем (219) в модели (216); причем секция имеет активную точку (306), связанную с идентификатором (222) объема.
6. Производственная система (1500) по п. 1, в которой секции (136) отображают в разобранном виде.
7. Способ производства воздушного летательного аппарата (104), согласно которому:
идентифицируют (1000) модель (216) для воздушного летательного аппарата (104);
отображают (1002) секции (136) воздушного летательного аппарата (104) в графическом пользовательском интерфейсе (208) на устройстве отображения в качестве визуальной информации о воздушном летательном аппарате (104) и
управляют сборкой воздушного летательного аппарата (104) на основе секций (136), отображенных на устройстве отображения, причем
секции (136) соответствуют секциям (136), произведенным для сборки воздушного летательного аппарата (104), и секции (136) являются выбираемыми.
8. Способ по п. 7, в котором этап управления включает операции, согласно которым
управляют задачами, выполняемыми в отношении деталей для сборки воздушного летательного аппарата (104) на основе секций (136), отображенных на устройстве отображения.
9. Способ по п. 7, согласно которому дополнительно:
выявляют (1112) выбор секции (304) из секций (136), отображенных в графическом пользовательском интерфейсе (208);
идентифицируют (1000) объем (219) в модели (216), соответствующей секции, выбранной из секций (136), отображенных в графическом пользовательском интерфейсе (208); и
отображают (1002) указанную секцию в графическом пользовательском интерфейсе (208) с использованием объема (219) в модели (216), идентифицированной для выбранной секции;
причем объем (219) идентифицируют на основе секционного вида (223) воздушного летательного аппарата (104) и идентификаторов (221) для указанного секционного вида (223).
10. Способ по п. 9, в котором идентификатор (222) объема в идентификаторах (221) объема содержит группу координат (406), определяющих объем (219) в модели (216); причем секция имеет активную точку (306), связанную с идентификатором (222) объема.
11. Способ по п. 7, в котором секции (136) отображают в разобранном виде.
12. Способ по п. 7, в котором секции (136) отображают на секционном виде (223) воздушного летательного аппарата (104).
13. Способ по п. 7, в котором идентифицирование (1000) модели (216) для воздушного летательного аппарата (104) включает операции, согласно которым:
отображают (1002) группу зданий в производственном сооружении и
идентифицируют (1000) модель (216) для воздушного летательного аппарата (104) на основе выбора здания в указанной группе зданий в производственном сооружении.
14. Способ по п. 7, согласно которому дополнительно:
отображают (1002) позиции для сборки воздушного летательного аппарата (104) и
идентифицируют (1000) секции (136) воздушного летательного аппарата (104) на основе выбора позиции воздушного летательного аппарата (104) из отображенных позиций;
причем секции (136) воздушного летательного аппарата (104) в указанной позиции являются секциями (136), произведенными в выбранной позиции.
| US 8209838 B2, 03.07.2012 | |||
| УСТАНОВОЧНЫЙ МОДУЛЬ ДЛЯ АППАРАТУРЫ В БАГАЖНОМ ОТСЕКЕ СПЕЦИАЛИЗИРОВАННОГО АВТОМОБИЛЯ | 2010 |
|
RU2427487C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ ДЛЯ ЭЛЕКТРОННЫХ СХЕМ С ИСПОЛЬЗОВАНИЕМ ОДНОГО ФОТОГАЛЬВАНИЧЕСКОГО ЭЛЕМЕНТА | 2008 |
|
RU2431915C2 |
| СПОСОБ И УСТРОЙСТВО ГЕНЕРИРОВАНИЯ ПАРАМЕТРИЧЕСКОЙ МОДЕЛИ, СВЯЗАННОЙ С ГЕОМЕТРИЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2006 |
|
RU2474874C2 |
| RU 2011101944 A, 27.07.2012. | |||

