1. ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к воздушному летательному аппарату и, в частности, к предоставлению навигационной информации на воздушный летательный аппарат. В частности, настоящее изобретение относится к способу и устройству для отправки навигационной информации на воздушный летательный аппарат, чтобы осуществлять наведение воздушного летательного аппарата к месту посадки.
2. УРОВЕНЬ ТЕХНИКИ
Когда воздушный летательный аппарат приближается к аэропорту, от одной или большего количества систем может быть получена навигационная информация для помощи при наведении воздушного летательного аппарата. Например, радионавигационная система захода на посадку по приборам с использованием метрового диапазона (instrument landing system, ILS), сантиметрового диапазона (microwave landing system, MLS), система глобального позиционирования (GPS) и иные типы систем могут быть использованы для предоставления навигационной информации на воздушный летательный аппарат для использования при его наведении с приближением к взлетно-посадочной полосе.
Системы дифференциальной коррекции, расположенные на земле в аэропортах предоставляют информацию, которая может быть использована воздушным летательным аппаратом для увеличения точности приемника глобальной навигационной спутниковой системы (GNSS) в воздушном летательном аппарате. Спутники передают сигналы, обработанные этими системами дифференциальной коррекции.
Эти типы систем дифференциальной коррекции передают информацию о поправках для измеренных псевдодальностей спутников. Поправки являются расстояниями, рассчитанными на основе разности и обозначенными спутниками и известными фиксированными положениями. Эти системы находятся в опорном положении, подвергнутом контрольному наблюдению с очень высокой точностью.
Приемник в опорном положении принимает сигнал глобальной навигационной спутниковой системы (GNSS) и использует ожидаемые расстояния, полученные по известному положению, для расчета поправок к дальности. Система дифференциальной коррекции принимает псевдодальности от приемников и сравнивает это с ожидаемыми псевдодальностями с разностью, являющейся поправкой ошибок. Процесс выработки информации часто называют дифференциальной коррекцией, а ошибку или поправки также называют данными поправок к псевдодальности.
Система дифференциальной коррекции затем передает эти данные поправок к псевдодальности на приемник глобальной навигационной спутниковой системы в воздушном летательном аппарате для использования при корректирующих изменениях, выполняемых этой системой в воздушном летательном аппарате. Эти данные поправок к псевдодальности используются воздушным летательным аппаратом для получения более точного места расположения воздушного летательного аппарата.
Многие из этих систем дифференциальной коррекции в аэропортах являются постоянными наземными установками с антеннами для приема сигналов от спутников в местах, подвергаемых предварительному контрольному наблюдению. В некоторых случаях необходимо иметь возможность переноски для временного использования в аэропорту или другом месте со взлетно-посадочной полосой или посадочной полосой, на которую может приземлиться воздушный летательный аппарат.
Некоторые системы дифференциальной коррекции, которые выдают данные поправок к псевдодальности, выполнены с возможностью переноски и могут быть перемещены из одного места в другое. При этом такие используемые в настоящее время портативные системы дифференциальной коррекции требуют времени для развертывания и приведения в работоспособное состояние, и период этого часто длится дольше необходимого. Размер и сложность оборудования в используемых в настоящее время портативных системах дифференциальной коррекции заставляет тратить на развертывания больше времени и сил, чем желательно. Сложность указанных систем обуславливает необходимость часто проводимого специального обучения специалистов-операторов для обеспечения эксплуатации и развертывания используемых в настоящее время портативных систем дифференциальной коррекции.
При этом места расположения антенн определяют и осуществляют развертывание по результатам контрольных наблюдений этого места, проводимых заранее. Этот процесс является таким же, как и процесс, осуществляемый для постоянных установок этих систем, и также приводит к увеличению времени, необходимого для развертывания системы дифференциальной коррекции. В результате этого, требуется время для выполнения контрольного наблюдения и получения результатов, чтобы разместить антенны в приемниках. В результате этого, развертывание используемых в настоящее время портативных систем дифференциальной коррекции происходит не так быстро, как требуется во многих случаях. Например, может возникнуть ситуация, в которой воздушный летательный аппарат может быть перенаправлен в другое место для посадки, в котором система дифференциальной коррекции недоступна. В этой ситуации данные поправок к псевдодальности для воздушного летательного аппарата могут быть не доступны с необходимой скоростью и зависят от времени, которым располагают для развертывания используемой в настоящее время портативной системы дифференциальной коррекции до того, как информация будет нужна воздушному летательному аппарату.
В результате этого, возможность переноски и простота развертывания и использования применяемых в настоящее время портативных систем дифференциальной коррекции не являются достаточными. В связи с этим было бы желательным иметь способ и устройство, учитывающие по меньшей мере одну из рассмотренных выше проблем, а также другие возможные проблемы.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В одном иллюстративном варианте реализации портативная система дифференциальной коррекции содержит группу опорных приемников в группе мест расположения и источник навигационной информации. Группа опорных приемников принимает спутниковые сигналы и определяет необработанные данные псевдодальности и группу параметров спутниковых данных по спутниковым сигналам. Необработанные данные псевдодальности и группа параметров спутниковых данных формируют спутниковые данные. Источник навигационной информации принимает спутниковые данные от группы опорных приемников и определяет уровень точности для группы опорных приемников на основе спутниковых данных, при этом группа мест расположения является первой группой мест расположения, уровень точности для группы опорных приемников на основе спутниковых данных является первым уровнем точности для первой группы мест расположения для группы опорных приемников, причем спутниковые данные представляют собой первые спутниковые данные. Источник навигационной информации определяет второй уровень точности для группы опорных приемников на основе вторых спутниковых данных, сформированных по спутниковым сигналам от группы опорных приемников, после перемещения части группы опорных приемников во вторую группу мест расположения, которая отличается от первой группы мест расположения, при этом источник навигационной информации также содержит устройство контрольного самонаблюдения, выполняющее контрольное самонаблюдение, которое определяет группу мест расположения, где была размещена группа опорных приемников, и которое показывает, имеет ли уровень точности для группы опорных приемников необходимый уровень точности в указанной группе мест расположения, а когда группа опорных приемников имеет необходимый уровень точности источник навигационной информации также генерирует сообщения с использованием навигационной информации по спутниковым данным, когда группа опорных приемников имеет необходимый уровень точности.
Еще в одном иллюстративном варианте реализации представлен способ выработки навигационной информации для воздушного летательного аппарата. Спутниковые сигналы принимают в группе опорных приемников в группе мест расположения. Уровень точности определяют для группы опорных приемников на основе спутниковых данных, сформированных по спутниковым сигналам, при этом указанная группа мест расположения является первой группой мест расположения, уровень точности для группы опорных приемников на основе спутниковых данных является первым уровнем точности для первой группы мест расположения для группы опорных приемников, причем спутниковые данные представляют собой первые спутниковые данные. Определяют второй уровень точности для группы опорных приемников на основе вторых спутниковых данных, сформированных по спутниковым сигналам от группы опорных приемников, после перемещения части группы опорных приемников во вторую группу мест расположения, которая отличается от первой группы мест расположения. Выполняют контрольное самонаблюдение, которое определяет группу мест расположения, где была размещена группа опорных приемников, и которое показывает, имеет ли уровень точности для группы опорных приемников необходимый уровень точности в указанной группе мест расположения. Сообщения генерируют с использованием навигационной информации по спутниковым данным, когда группа опорных приемников имеет необходимый уровень точности.
Еще в одном иллюстративном варианте реализации представлено устройство, предназначенное для вышеописанной системы дифференциальной коррекции и содержащее передающую систему, которая передает сообщения на воздушный летательный аппарат, рабочее приложение, которое управляет работой группы опорных приемников, передающей системы и источника навигационной информации, и конфигурационное приложение, которое принимает входные пользовательские данные для доступа к конфигурационным данным, используемым устройством обработки спутниковых данных для генерирования сообщений.
Вышеописанные система дифференциальной коррекции и устройство, используемое в этой системе, обеспечивают дополнительный технический результат, заключающийся в уменьшении времени, затрачиваемого на осуществление развертывания системы дифференциальной коррекции при перемещении любого опорного приемника этой системы дифференциальной коррекции в любое новое место расположения.
Вышеописанный способ выработки навигационной информации для воздушного летательного аппарата обеспечивает дополнительный технический результат, заключающийся в ускорении получения навигационной информации воздушным летательным аппаратом в случае перемещения любого опорного приемника в любое новое место расположения.
Кроме того, источник навигационной информации содержит базу конфигурационных данных для конфигурационных данных.
Указанные признаки и функции могут быть реализованы независимо в различных вариантах осуществления настоящего изобретения или могут быть скомбинированы с получением других вариантов осуществления изобретения, дополнительные подробности которых могут быть очевидными при обращении к последующему описанию и чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки иллюстративных вариантов реализации изобретения, обеспечивающие новизну по сравнению с уровнем техники, изложены в прилагаемой формуле изобретения. При этом иллюстративные варианты реализации изобретения, а также предпочтительный режим их применения, дополнительные цели и преимущества будут лучше поняты из следующего подробного описания иллюстративного варианта реализации изобретения при рассмотрении вместе с сопроводительными чертежами, на которых:
на ФИГ. 1 показана иллюстрация навигационной среды воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 2 показана иллюстрация блок-схемы навигационной среды воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 3 показана иллюстрация блок-схемы портативной системы дифференциальной коррекции в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 4 показана иллюстрация блок-схемы источника навигационной информации в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 5 показан пример потока данных для генерирования сообщений в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 6 показан пример потока данных для определения соответствия необходимому уровню точности для группы опорных приемников в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 7 показана иллюстрация блок-схемы ввода данных опорных приемников в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 8 показана иллюстрация блок-схемы ввода данных описания сообщений в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 9 показана иллюстрация навигационной среды воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 10 показана иллюстрация устройства обработки спутниковых данных в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 11 показана иллюстрация графического пользовательского интерфейса для управления конфигурационными данными в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 12 показана иллюстрация графического пользовательского интерфейса для рабочего приложения портативной системы дифференциальной коррекции в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 13 показана иллюстрация графического пользовательского интерфейса для рабочего приложения портативной системы дифференциальной коррекции в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 14 показана иллюстрация структурной схемы процесса для выработки навигационной информации в портативной системе дифференциальной коррекции в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 15 показана иллюстрация структурной схемы процесса для отправки навигационной информации от портативной системы дифференциальной коррекции в соответствии с иллюстративным вариантом реализации изобретения;
на ФИГ. 16 показана иллюстрация структурной схемы процесса для выполнения контрольного самонаблюдения в соответствии с иллюстративным вариантом реализации изобретения и
на ФИГ. 17 показана иллюстрация блок-схемы системы обработки данных в соответствии с иллюстративным вариантом реализации изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В иллюстративных вариантах реализации изобретения рассматриваются и учитываются различные соображения. Например, в иллюстративных вариантах реализации изобретения рассматривается и учитывается, что конструкция доступных в настоящее время систем дифференциальной коррекции не настолько транспортабельна, насколько это необходимо и требует больше времени для развертывания, чем необходимо. Например, доступные в настоящее время системы могут быть перемещены с помощью грузовых автомобилей и не могут переноситься одним специалистом-оператором.
Также в иллюстративных вариантах реализации изобретения рассматривается и учитывается, что указанные используемые в настоящее время портативные системы дифференциальной коррекции не имеют пользовательского интерфейса, который обеспечивает возможность управления портативной системой дифференциальной коррекции. Например, в настоящее время нет интерфейса, который обеспечивает взаимодействие в необходимом количестве со специалистом-оператором для развертывания и конфигурирования портативной системы дифференциальной коррекции на месте расположения или любом другом месте.
В качестве еще одного примера в иллюстративных вариантах реализации изобретения рассматривается и учитывается, что определение положений приемников настоящее время включает проводимое заранее контрольное наблюдение места расположения для получения положения, достаточного точного для расчета данных поправок к псевдодальности. Этот процесс занимает больше времени, чем необходимо.
Таким образом, иллюстративные варианты реализации изобретения обеспечивают создание способа и устройства для выработки навигационной информации для воздушного летательного аппарата. Например, устройство содержит группу опорных приемников в группе мест расположения, которая принимает спутниковые сигналы. Устройство определяет уровень точности для группы опорных приемников на основе спутниковых данных, сформированных по спутниковым сигналам. Устройство затем показывает, когда указанная группа мест расположения группы опорных приемников не соответствует необходимому уровню точности.
Со ссылкой на фигуры чертежей, и в частности на ФИГ. 1, изображена иллюстрация навигационной среды для воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения. В этом примере навигационная среда 100 для воздушного летательного аппарата содержит воздушный летательный аппарат 102. Воздушный летательный аппарат 102 совершает полет над поверхностью 104 земли и совершает заход на посадку в аэропорту 106.
Воздушный летательный аппарат 102 имеет приемник глобальной системы позиционирования на местности. Воздушный летательный аппарат принимает сигналы 108 от спутников 110. В этом примере спутники 110 включают в себя спутник 112, спутник, 114, спутник 116 и спутник 118.
Приемник глобальной системы позиционирования на местности, находящийся в воздушном летательном аппарате 102, определяет положение воздушного летательного аппарата 102 с использованием сигналов 108. Точность положения в этом иллюстративном примере, определенного опорным приемником в воздушном летательном аппарате 102, не является достаточной.
В иллюстративном примере портативная система 120 дифференциальной коррекции генерирует навигационную информацию, которая может быть использована воздушным летательным аппаратом 102 для увеличения точности при определении положения воздушного летательного аппарата 102. Например, портативная система 120 дифференциальной коррекции определяет данные поправок к псевдодальности по сигналам 108. Данные поправок к псевдодальности, формируют навигационную информацию, которую отправляют на воздушный летательный аппарат 102 с сигналами 122. Навигационная информация может содержать иную информацию, используемую воздушным летательным аппаратом 102 для работы в аэропорту 106. Например, навигационная информация может также включать в себя по меньшей мере одно из следующего: информацию о наведении, информацию о взлетно-посадочной полосе или иную подходящую навигационную информацию.
При использовании в настоящем документе выражение "по меньшей мере одно из следующего", употребляемое со списком объектов, означает, что могут быть использованы различные комбинации из одного или большего количества приведенных в списке объектов и только один из объектов, указанных в списке, может быть необходим. Другими словами, "по меньшей мере одно из этого" означает, что любое сочетание элементов и их количество из этого списка может быть использовано, но не все из пунктов списка должны присутствовать. Объект может представлять собой конкретный объект, вещь или категорию.
Например, без ограничения, выражение "по меньшей мере одно из следующего: объект А, объект В и объект С" может включать объект А, объект А и объект В или объект В. Этот пример также может включать объект А, объект В и объект С или объект В и объект С. Конечно, могут присутствовать любые комбинации этих объектов. В других примерах выражение "по меньшей мере одно из следующего" может представлять собой, например, без ограничения, два объекта А, один объект В и десять объектов С; четыре объекта В и семь объектов С или какие-либо иные подходящие комбинации.
Воздушный летательный аппарат 102 может повысить точность определения своего положения посредством приема данных поправок к псевдодальности в навигационной информации, отправленных в сигналах 122 от портативной системы 120 дифференциальной коррекции. Данные поправок к псевдодальности в навигационной информации используются воздушным летательным аппаратом 102 для корректировки положения, определенного воздушным летательным аппаратом 102 по сигналам 108, таким образом, что положение определено с увеличенной точностью. Иными словами, данные поправок к псевд о дальности в навигационной информации, отправляемой сигналами 122, могут быть использованы для "дифференциальной коррекции" (augment) положения, определенного воздушным летательным аппаратом 102.
В этом иллюстративном примере портативная система 120 дифференциальной коррекции имеет признаки, которыми преодолеваются технические недостатки, свойственные другим используемым в настоящее время портативным системам дифференциальной коррекции, выдающим навигационную информацию на воздушный летательный аппарат 102. В одном иллюстративном варианте реализации изобретения портативная система 120 дифференциальной коррекции имеет приспособление для контрольного самонаблюдения, которое обеспечивает возможность развертывания портативной системы 120 дифференциальной коррекции и работы с ней без контрольного наблюдения необходимой зоны, выполняемого перед развертыванием портативной системы 120 дифференциальной коррекции. Таким образом обеспечивается уменьшение времени, необходимого для приведения портативной системы 120 дифференциальной коррекции в работоспособное состояние, по сравнению с портативной системой дифференциальной коррекции, использующей контрольное наблюдение места расположения портативной системы дифференциальной коррекции, которое проводится заранее.
Также, еще в одном иллюстративном примере портативная система 120 дифференциальной коррекции характеризуется большей простотой для использования специалистами-операторами, развертывающими портативную систему 120 дифференциальной коррекции и работающими с ней. Пользовательский интерфейс снабжен программными модулями в архитектуре, увеличивающей скорость, с которой может быть развернута портативная система 120 дифференциальной коррекции и начата работа с ней специалистом-оператором. С помощью указанного пользовательского интерфейса можно быстро и легко внести изменения в конфигурацию портативной системы 120 дифференциальной коррекции на месте ее использования.
Иллюстрация навигационной среды 100 для воздушного летательного аппарата по ФИГ. 1 не предназначена для ограничения того, каким образом могут быть реализованы другие варианты реализации. Например, навигационная информация может быть использована во время других периодов эксплуатации воздушного летательного аппарата 102 кроме посадки в аэропорту 106. Например, информация о поправках может быть передана в навигационной информации для использования воздушным летательным аппаратом 102 в плане следующего полета при осуществлении крейсерского этапа полета. В качестве еще одного примера, спутники 110 могут включать в себя другое количество спутников, такое как 5, 8, 24 или любое другое количество спутников.
Со ссылкой на ФИГ. 2 показана иллюстрация блок-схемы навигационной среды воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения. Навигационная среда 100 для воздушного летательного аппарата по ФИГ. 1 представляет собой иллюстрацию одного варианта физической реализации навигационной среды 200 воздушного летательного аппарата, показанной на этой фигуре в блочной форме.
Как показано на чертежах, воздушный летательный аппарат 202 выполняет фазы 204 полета во время работы в навигационной среде 200 воздушного летательного аппарата. В этом иллюстративном примере воздушный летательный аппарат 202 находится в фазе 206 посадки. В фазе 206 посадки воздушный летательный аппарат 202 совершает посадку в месте 208. Место 208 может представлять собой аэропорт, взлетно-посадочную полосу на поле, участок суши или какое-либо иное подходящее место.
В этом иллюстративном примере воздушный летательный аппарат 202 имеет приемник 210. Приемник 210 принимает спутниковые сигналы 212 от спутников 214 в навигационной спутниковой системе 216.
Как показано на чертежах, спутники 214 в навигационной спутниковой системе 216 посылают спутниковые сигналы 212, которые обеспечивают приемнику 210 возможность определения положения 218 приемника 210. Положение 218 приемника 210 также является положением 218 воздушного летательного аппарата 102. Приемник 210 представляет собой по меньшей мере одно из следующего: приемник глобальной навигационной спутниковой системы или иной подходящий тип приемника, который определяет положение 218 воздушного летательного аппарата 102.
В иллюстративном примере одна или большее количество групп спутников 214 может быть частью одной или большего количества глобальных навигационных спутниковых систем. Эти группы могут быть упомянуты как группировки. Группа спутников 214 может являться глобальной навигационной спутниковой системой (GNSS). Группы спутников 214 могут быть частью системы глобального позиционирования (GPS), глобальной навигационной спутниковой системы ГЛОНАСС (GLONASS) или какой-либо иной подходящей навигационной спутниковой системы.
Как показано на чертежах, приемник 210 определяет положение 218 воздушного летательного аппарата 202 по спутниковым сигналам 212. Положение 218 представляет собой место расположения воздушного летательного аппарата 202 в трехмерном пространстве. Положение 218 может быть описано с использованием долготы, широты и высоты. В некоторых иллюстративных примерах положение 218 также может включать в себя ориентацию воздушного летательного аппарата 202.
В иллюстративном примере положение 218, определенное приемником 210, может не иметь необходимого уровня точности. Точность положения 218 воздушного летательного аппарата 202 может быть увеличена навигационной информацией 220, направляемой на воздушный летательный аппарат 202 сигналами 222 от портативной системы 224 дифференциальной коррекции.
Портативная система 224 дифференциальной коррекции принимает спутниковые сигналы 212 от спутников 214 и вырабатывает навигационную информацию 220 с использованием спутниковых сигналов 212. В частности, портативная система 224 дифференциальной коррекции генерирует данные 232 поправок к псевдодальности и отправляет эту информацию в навигационной информации 220 на воздушный летательный аппарат 202 сигналами 222.
Воздушный летательный аппарат 202 использует данные 232 поправок к псевдодальности для корректировки данных 234 псевдодальности, определенных приемником 210 в воздушном летательном аппарате 202. Полученные в результате поправки при определении положения 218 имеют более высокий уровень точности, чем без данных 232 поправок к псевдодальности. Поправка этого типа может быть названа дифференциальной коррекцией для данных 234 псевдодальности.
В иллюстративном примере портативная система 224 дифференциальной коррекции может быть перемещена с первого места во второе место и развернута быстрее по сравнению с другими портативными системами дифференциальной коррекции. Большей точностью достигается повышенная безопасность и эффективность эксплуатируемого воздушного летательного аппарата. Например, увеличенная точность позволяет уменьшить расстояния между воздушными летательными аппаратами. Иными словами, большее количество воздушных летательных аппаратов может работать в одном и том же воздушном пространстве с необходимым уровнем безопасности.
Со ссылкой на ФИГ. 3 изображена иллюстрация блок-схемы портативной системы дифференциальной коррекции в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере показаны компоненты, которые могут находиться в портативной системе 224 дифференциальной коррекции. Как показано на чертежах, портативная система 224 дифференциальной коррекции включает в себя приемную систему 300, передающую систему 302 и источник 304 навигационной информации.
Приемная система 300 включает в себя группу опорных приемников 308. Группа опорных приемников 308 может быть реализована с использованием любых аппаратных средств, программного обеспечения или их комбинации, которые принимают спутниковые сигналы 212 от спутников 214 и обрабатывают спутниковые сигналы 212.
Как показано на чертежах, группа опорных приемников 308 может получать более чем одну частоту на спутник в спутниках 214. Также, группа опорных приемников 308 может быть выполнена с возможностью приема спутниковых сигналов 212 от множества группировок спутников 214.
Группировка спутников 214 представляет собой группу спутников, работающих вместе. Такая группировка может считаться множеством спутников с согласованным покрытием поверхности земли, работающих вместе под общим контролем и синхронизированных так, что они имеют перекрытие в зоне своего покрытия и дополняют друг друга, а не мешают зоне охвата других спутников. Примерами группировок являются, например, группы спутников 214, такие как система глобального позиционирования (GPS), глобальной навигационной спутниковой системы ГЛОНАСС (GLONASS) или иные подходящие навигационные спутниковые системы.
В настоящем документе термин "группа" при использовании со ссылкой на объекты означает один или большее количество объектов. Например, группа опорных приемников 308 означает один или большее количество опорных приемников.
В этом иллюстративном примере группа опорных приемников 308 принимает спутниковые сигналы 212. Группа опорных приемников 308 определяет данные 310 псевдодальности и группу параметров 318 спутниковых данных по спутниковым сигналам 212, принятым группой опорных приемников 308. Параметры 318 спутниковых данных включают в себя по меньшей мере одно из следующего: идентификационное определение спутника, данные коэффициентов поправок спутниковых часов, данные положения спутника, несущие волны, коды определения расстояний, данные атмосферных ошибок или другие подходящие типы данных от спутника для определения информации о положении по спутниковым сигналам.
В этом примере данные 310 псевдодальности представляют собой необработанные данные 312 псевдодальности. Необработанные данные 312 псевдодальности представляют собой данные о псевдодальностях, определенных по спутниковым сигналам 212, без включения каких-либо поправок или изменений.
Необработанные данные 312 псевдодальности и указанная группа параметров 318 спутниковых данных формируют спутниковые данные 320 в этом примере. Группа опорных приемников 308 посылают спутниковые данные на источник 304 навигационной информации.
На основе необработанных данных 312 псевдодальности и известного положения 314 портативной системы 224 дифференциальной коррекции, портативная система 224 дифференциальной коррекции генерирует данные 232 поправок к псевдодальности с использованием спутниковых данных 320 для формирования навигационной информации 220. В иллюстративном примере источник 304 навигационной информации отправляет навигационную информацию 220 в сообщениях 322 сигналами 222 к воздушному летательному аппарату 202 посредством передающей системы 302. В этом иллюстративном примере сигналы 222 являются радиочастотными (RF) сигналами.
Как показано на чертежах, точность данных 232 поправок к псевдодальности зависит от точности известного положения 314 для группы опорных приемников 308. В этих иллюстративных примерах известное положение 314 в настоящее время основано на выполнении контрольного наблюдения за местом, в котором предполагается развертывание портативной системы 224 дифференциальной коррекции. Контрольное наблюдение включает в себя контрольное наблюдение специалистами-операторами за опорной точкой, например, на взлетно-посадочной полосе.
Далее выполняют определение положения для каждого опорного приемника. Все данные, собранные во время контрольных наблюдений, затем обрабатывают и вводят в структуру данных для использования посредством портативной системы 224 дифференциальной коррекции. Структура данных может быть выбрана из одного файла, связанного списка, таблицы, базы данных или какой-либо другой подходящей структуры данных.
С используемыми в настоящее время системами дифференциальной коррекции, размещение группы опорных приемников 308 в точных местах, определенных для этих устройств, является важным условием для достижения необходимого уровня точности 350 для данных 232 поправок к псевдодальности. Неправильное расположение может привести к невозможности получения необходимого уровня точности 350 для данных 232 поправок к псевдодальности.
В иллюстративном примере количество времени, необходимое для развертывания портативной системы 224 дифференциальной коррекции, уменьшается по сравнению с доступными в настоящее время портативными системами дифференциальной коррекции. В частности, в иллюстративном примере время, необходимое для выполнения контрольного наблюдения участка, может не затрачиваться или быть сокращено.
Источник 304 навигационной информации обеспечивает возможность определения уровня точности 352 данных 232 поправок к псевдодальности, которое выполняется перед эксплуатированием портативной системы 224 дифференциальной коррекции. Источник 304 навигационной информации выполняет контрольное самонаблюдение 354, чтобы определить имеет ли уровень точности 324 для данных 232 поправок к псевдодальности необходимый уровень точности 328. Это определение основывается на том, имеет ли уровень точности 324 необходимый уровень точности 328. Например, источник 304 навигационной информации принимает спутниковые данные 320 от группы опорных приемников 308 и определяет уровень точности 324 для группы опорных приемников 308 на основе спутниковых данных 320.
Источник 304 навигационной информации генерирует показатель 355, определяющий соответствие группы мест расположения 326 группы опорных приемников 308 необходимому уровню точности 328. С указанием в показателе 355 на то, что группа мест расположения 326 группы опорных приемников 308 не соответствует необходимому уровню точности 328, один или большее количество приемников из группы опорных приемников 308 могут быть перемещены на новые места расположения 342 или удалены из группы опорных приемников 308.
В одном иллюстративном примере контрольное самонаблюдение 354 может быть выполнено при отсутствии предварительного контрольного наблюдения за группой мест расположения 326. Таким образом, время и планирование, необходимые для выполнения контрольных наблюдений перед развертыванием портативной системы 224 дифференциальной коррекции, может не затрачиваться.
Кроме того, если контрольное наблюдение было выполнено заранее, контрольное самонаблюдение 354 может быть выполнено, чтобы определить обеспечивает ли контрольное наблюдение необходимый уровень точности. Контрольное самонаблюдение 354 может обеспечить проверку точности контрольного наблюдения, выполненного предварительно.
Выполненное предварительно контрольное наблюдение может определять группу мест расположения 326. Одна или большее количество групп мест расположения 326 могут не обеспечивать необходимого уровня точности по целому ряду различных причин. Например, контрольное наблюдение может оказаться точным при определении групп мест расположения 326. В качестве еще одного примера здание, звукового барьера или какой-либо другой объект может блокировать один или большее количество приемников из группы опорных приемников 308 и не допускать приема спутниковых сигналов 212 с необходимым уровнем точности.
Таким образом, контрольное самонаблюдение 354 может быть использовано для проверки контрольного наблюдения, выполненного предварительно. Таким образом, контрольное самонаблюдение 354 может быть использовано для обеспечения достижения необходимого уровня точности.
Источник 304 навигационной информации генерирует сообщения 322 с использованием навигационной информации 220 по спутниковым данным 320, когда группа опорных приемников 308 имеет необходимый уровень точности 328. Сообщения 322 могут затем быть переданы на воздушный летательный аппарат 202 посредством передающей системы 302.
В одном иллюстративном примере группа мест расположения 326 является первой группой мест расположения 326, уровень точности 324 для группы опорных приемников 308 на основе спутниковых данных 320 является первым уровнем точности 330 для первой группы мест расположения 326 для группы опорных приемников 308. В этом примере спутниковые данные 320 являются первыми спутниковыми данными 332.
В этом примере после перемещения части 334 группы опорных приемников 308 во вторую группу мест расположения 326, которая отличается от первой группы мест расположения 326, источник 304 навигационной информации определяет второй уровень точности 336 для группы опорных приемников 308 на основе вторых спутниковых данных 320, определенных по спутниковым сигналам 212 группой опорных приемников 308. В иллюстративных примерах, второй уровень точности 336 на основе вторых спутниковых данных 320 может быть определен после выполнения одной или более из следующих операций: повторная подача питания и реконфигурирование части 334 группы опорных приемников 308.
Как показано на чертежах, источник 304 навигационной информации может быть реализован в программном обеспечении (software), аппаратных средствах (hardware), программно-аппаратных средствах (firmware) или их комбинации. При использовании программного обеспечения (software) операции, выполняемые источником 304 навигационной информации, могут быть реализованы в программном коде, выполненном с возможностью запуска в процессорном блоке. При использовании программно-аппаратных средств (firmware) операции, выполняемые источником 304 навигационной информации, могут быть реализованы в программном коде и данных и сохранены в постоянном запоминающем устройстве для запуска в процессорном блоке. При использовании аппаратных средств (hardware) они могут включать в себя схемы, которые работают для выполнения операций в источнике 304 навигационной информации.
В иллюстративных примерах, аппаратные средства могут иметь форму системы замыкания, интегральной схемы, специализированной интегральной схемы (ASIC), программируемого логического устройства или аппаратных средств какого-либо другого подходящего типа, выполненных для выполнения множества операций. С программируемым логическим устройством, рассматриваемое устройство может быть выполнено с возможностью выполнения указанного множества операций. Конфигурация рассматриваемого устройства может быть изменена позднее, может иметь постоянную конфигурацию для выполнения указанного множества операций. Примеры программируемых логических устройств включают в себя, например, программируемый логический блок, программируемую матричную логическую схему, логическую матрицу с эксплуатационным программированием, логическую матрицу с эксплуатационным программированием и иные подходящие устройства на основе аппаратных средств. Кроме того, процессы могут быть реализованы в органических компонентах, встроенных в неорганические компоненты, и могут состоять целиком из органических компонентов, за исключением человека. Например, процессы могут быть реализованы в виде схем в органических полупроводниках.
В иллюстративном примере источник 304 навигационной информации может быть расположен в компьютерной системе 338. Компьютерная система 338 представляет собой один или большее количество компьютеров. Если в компьютерной системе 338 присутствует больше одного компьютера, эти компьютеры могут сообщаться друг с другом через среду связи, такую как сеть.
Кроме того, увеличенная мобильность для портативной системы 224 дифференциальной коррекции может быть достигнута посредством группы корпусов 340, которые выполнены портативными. Группа корпусов 340 может вмещать группу опорных приемников 308, передающую систему 302, которая передает сообщения 322 на воздушный летательный аппарат 202, и источник 304 навигационной информации.
Со ссылкой на ФИГ. 4 изображена иллюстрация блок-схемы источника навигационной информации в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере на чертеже показано множество различных компонентов, которые могут быть использованы для реализации источника 304 навигационной информации. Как показано на чертежах, источник 304 навигационной информации включает в себя процессор 400 спутниковых данных, рабочее приложение 402, конфигурационное приложение 404 и устройство 405 контрольного самонаблюдения.
Как показано на чертежах, процессор 400 спутниковых данных принимает спутниковые данные 320 от группы опорных приемников 308 и генерирует сообщения 322 с навигационной информацией 220 по спутниковым данным 320 и конфигурационным данным 406. Описания сообщений в конфигурационных данных 406 и спутниковые данные 320 используются устройством 400 обработки спутниковых данных для генерирования сообщений 322.
В этом иллюстративном примере конфигурационные данные 406 расположены в базе 414 конфигурационных данных. База 414 конфигурационных данных расположена в источнике 304 навигационной информации в этом примере. Устройство 400 обработки спутниковых данных отправляет сообщения 322 на воздушный летательный аппарат 202 посредством передающей системы 302.
Как показано на чертежах, рабочее приложение 402 управляет работой группы опорных приемников 308 в приемной системе 300, передающей системы 302 и источника 304 навигационной информации. В иллюстративном примере источник 304 навигационной информации включает в себя пользовательский интерфейс 408, который обеспечивает специалисту-оператору 410 возможность взаимодействовать с рабочим приложением 402. В иллюстративном примере пользовательский интерфейс 408 может представлять собой графический пользовательский интерфейс 422. Например, конфигурационное приложение 404 и рабочее приложение 402 отображают графический пользовательский интерфейс 422 и принимают входные пользовательские данные 412 посредством графического пользовательского интерфейса 422.
В других иллюстративных примерах оператором может быть другое устройство или компьютер пользователя, который взаимодействует с рабочим приложением 402 через пользовательский интерфейс 408. В этом типе реализации пользовательский интерфейс 408 может быть библиотекой интерфейсов прикладного программирования (API) для какого-либо другого типа интерфейса.
В иллюстративном примере конфигурационное приложение 404 принимает входные пользовательские данные 412 от специалиста-оператора 410 для доступа к конфигурационным данным 406, используемым устройством 400 обработки спутниковых данных для генерирования сообщений 322. Конфигурационные данные 406 включают в себя значения или иную информацию для использования в сообщениях 322. Этот доступ может быть по меньшей мере одним из следующего: считывание, запись или редактирование конфигурационных данных 406.
Конфигурационные данные 406 содержатся в сообщениях 322 с данными 232 поправок к псевдодальности для формирования навигационной информации 220 в этом иллюстративном примере. Навигационная информация 220 может также включать в себя по меньшей мере одно из следующего: информация о взлете, информация о посадке, информация о заходе на посадку, информация об уходе на второй круг или иная подходящая информация.
В иллюстративном примере устройство 405 контрольного самонаблюдения в источнике 304 навигационной информации выполняет контрольное самонаблюдение 354. Как показано на чертежах, устройство 405 контрольного самонаблюдения определяет группу мест расположения 326, где была размещена группа опорных приемников 308, и показывает, обеспечивает ли группа опорных приемников 308 необходимый уровень точности 328 в группе мест расположения 326. В результате этого первый опорный приемник в группе опорных приемников 308 может быть размещен в новом месте, которое не было подвергнуто контрольному наблюдению перед размещением первого опорного приемника в новом месте.
В этом показанном примере конфигурационные данные 406 могут также включать в себя информацию для группы опорных приемников 308 в приемной системе 300. Конфигурационные данные 406 могут быть использованы для задания параметров в группе опорных приемников 308 и могут также включать в себя информацию, заданную для определения того, имеет ли группа опорных приемников 308 необходимый уровень точности 328. Например, необходимый уровень точности 328 может находиться в конфигурационных данных 406.
Кроме того, в этом иллюстративном примере конфигурационное приложение 404 представляет собой первое конфигурационное приложение 416. Также, второе конфигурационное приложение 418 расположено в компьютерной системе 420. Второе конфигурационное приложение 418 в компьютерной системе 420 принимает входные пользовательские данные 412 в компьютерной системе 420 для доступа к конфигурационным данным 406, используемым устройством 400 обработки спутниковых данных для генерирования сообщений 322.
Со ссылкой на ФИГ. 5 изображена иллюстрация потока данных для генерирования сообщений в соответствии с иллюстративным вариантом реализации изобретения. Как показано на чертежах, источник 304 навигационной информации принимает спутниковые данные 320 от группы опорных приемников 308. В этом иллюстративном примере источник 304 навигационной информации генерирует навигационную информацию 220 по спутниковым данным 320.
Как показано на чертежах, описания 502 сообщений используются источником 304 навигационной информации во время этого процесса для генерирования сообщения 322. Описания 502 сообщений задают форматы навигационной информации 220 в сообщениях 322.
В этом иллюстративном примере каждое описание сообщений в описаниях 502 сообщений приведено для генерирования сообщений определенного типа, которое содержит данные из навигационной информации 220. Форматы, заданные описаниями 502 сообщений, определяют данные в навигационной информации 220, которые используются для генерирования сообщений 322.
В иллюстративном примере источник 304 навигационной информации генерирует сообщения 322 с использованием навигационной информации 220 в форматах, заданных описаниями 502 сообщений. Например, описание сообщений поправок к псевдодальности в описаниях 502 сообщений может указывать, как данные 232 поправок к псевдодальности из навигационной информации 220 размещены в сообщениях 322 для воздушного летательного аппарата. Описания 502 сообщений могут включать в себя по меньшей мере одно из следующего: описание сообщений по типу 1 с дифференциальными поправками для 100 вторых сглаженных псевдодальностей, описание сообщений по типу 2 с географической информацией портативной системы дифференциальной коррекции, описание сообщений по типу 4 с информацией захода на посадку и посадочной информацией, описание сообщений, определяемых по типу области промышленности, описания сообщений, определяемых, специалистом-оператором источника 304 навигационной информации, или описания сообщений иных подходящих типов.
Со ссылкой на ФИГ. 6 показана иллюстрация потока данных для определения соответствия необходимому уровню точности для группы опорных приемников в соответствии с иллюстративным вариантом реализации изобретения. Как показано на чертежах, опорный приемник 604 и опорный приемник 608 являются примерами опорных приемников в группе опорных приемников 308.
В иллюстративном примере устройство 405 контрольного самонаблюдения принимает спутниковые данные 602 от опорного приемника 604 и спутниковые данные 606 от опорного приемника 608. Спутниковые данные 602 и спутниковые данные 606 являются примерами спутниковых данных 320 по ФИГ. 3. Как показано на чертежах, спутниковые данные 602 отличаются от спутниковых данных 606.
В этом иллюстративном примере устройство 405 контрольного самонаблюдения определяет место расположения 610, где был размещен опорный приемник 604, с использованием спутниковых данных 602. Устройство 405 контрольного самонаблюдения также определяет уровень точности 612 места расположения 610 с использованием спутниковых данных 602. Например, опорный приемник 604 может отправлять информацию о месте расположения 610 и уровне точности 612 места расположения 610 в спутниковые данные 602.
Как показано на чертежах, устройство 405 контрольного самонаблюдения определяет место расположения 614, где был размещен опорный приемник 608, с использованием спутниковых данных 606. Устройство 405 контрольного самонаблюдения также определяет уровень точности 616 места расположения 614 с использованием спутниковых данных 606. Например, опорный приемник может отправлять информацию о месте расположения 614 и уровне точности 616 места расположения 614 в спутниковые данные 606. Место расположения 610 и место расположения 614 являются примерами мест расположения в группе мест расположения 326 по ФИГ. 3.
В этом иллюстративном примере устройство 405 контрольного самонаблюдения использует группу необходимых уровней точности 618 для группы опорных приемников 308, чтобы определять, соответствует ли уровень точности 612 и уровень точности 616 вместе необходимому уровню точности 350 для данных 232 поправок к псевдодалыюсти. Необходимый уровень точности 620 для опорного приемника 604 и необходимый уровень точности 622 для опорного приемника 608 являются примерами необходимого уровня точности 328 по ФИГ. 3. Как показано на чертежах, необходимый уровень точности 620 может быть таким же, что и необходимый уровень точности 622. Необходимый уровень точности 620 может быть отличным от необходимого уровня точности 622.
В указанном иллюстративном примере устройство 405 контрольного самонаблюдения определяет, есть ли соответствие необходимому уровню точности 350 для данных 232 поправок к псевдодальности на основе группы правил 624 для группы необходимых уровней точности 618 для группы опорных приемников 308. Например, правило в группе правил 624 может определять, что одна или большее количество группы приемников должна соответствовать своему требуемому уровню точности в группе необходимых уровней точности 618 для группы опорных приемников 308.
В качестве еще одного примера другое правило в группе правил 624 может определять, что две или большее количество группы опорных приемников 308 должны соответствовать требуемому уровню точности для двух или большего количества группы опорных приемников 308, или правила какие-либо иных подходящих типов. Это правило определяет, что два или большее количество приемников из группы опорных приемников 308 могут быть использованы устройством 405 контрольного самонаблюдения, когда необходима избыточность.
Как показано на чертежах, устройство 405 контрольного самонаблюдения генерирует показатель 355 на основе проведенного определения соответствия необходимому уровню точности 350 для данных 232 поправок к псевдодальности на основе группы правил 624 для группы необходимых уровней точности 618 для группы опорных приемников 308. Показатель 355 включает в себя по меньшей мере одно из следующего: уровень точности 612, уровень точности 616, группа необходимых уровней точности 618, место расположения 610 для опорного приемника 604, место расположения 614 для опорного приемника 608, проведенного определения соответствия необходимому уровню точности 350 для данных 232 поправок к псевдодальности или иной подходящий тип информации о необходимом уровне точности 350 данных 232 поправок к псевдодальности.
В этом иллюстративном примере показатель 355 может быть представлен множеством различных способов. Например, показатель 355 может быть выбран из по меньшей мере одного из следующего: электронное письмо, текстовое сообщение, всплывающее окно с сообщением, графический показатель, звук, цвет, текст, мигающие графические знаки, иконки, световой сигнал на панели аппаратных средств или каким-либо другим подходящим способом.
Со ссылкой на ФИГ. 7, показана иллюстрация блок-схемы ввода данных опорных приемников в соответствии с иллюстративным вариантом реализации изобретения. Как показано на чертежах, ввод 700 данных опорных приемников является примером ввода данных в базе 414 конфигурационных данных по ФИГ. 4. Ввод 700 данных опорных приемников включает в себя информацию для опорного приемника в группе опорных приемников 308.
В этом иллюстративном примере ввод 700 данных опорных приемников включает в себя множество различных полей. Как показано на чертежах, ввод 700 данных опорных приемников включает в себя идентификатор 702 опорных приемников, необходимый уровень точности 704 и параметры 706 опорных приемников.
В иллюстративном примере идентификатор 702 опорных приемников определяет опорный приемник в группе опорных приемников 308 по ФИГ. 3. Идентификатор 702 опорных приемников представляет собой по меньшей мере одно из следующего: серийный номер, названия, буквенно-цифровой текст для указания или иным образом определения опорного приемника. Например, идентификатор 702 опорных приемников может быть буквенно-цифровым текстом.
В этом примере идентификатор 702 опорных приемников может быть назначен опорному приемнику в группе опорных приемников 308. Необходимый уровень точности 704 представляет собой уровень точности, необходимый для опорного приемника, определенного идентификатором 702 опорных приемников в этом иллюстративном примере.
Как показано на чертежах, параметры 706 опорных приемников могут быть направлены на опорный приемник, определенный идентификатором 702 опорных приемников, чтобы установить значения для параметров, которые опорный приемник использует для работы и обработки спутниковых сигналов. Параметры 706 опорных приемников включают в себя по меньшей мере одно из следующего: скорости передачи спутниковых данных, типы спутниковых данных или иные параметры, подходящие для задания операций опорного приемника, определенного идентификатором 702 опорных приемников.
Со ссылкой на ФИГ. 8 показана иллюстрация блок-схемы ввода данных описания сообщений в соответствии с иллюстративным вариантом реализации изобретения. Как показано на чертежах, ввод 800 данных описания сообщений является примером ввода в базу 414 конфигурационных данных по ФИГ. 4.
В этом иллюстративном примере ввод 800 данных описания сообщений включает в себя множество различных полей. Как показано на чертежах, ввод 800 данных описания сообщений включает в себя идентификатор 802 типа сообщений и описание 804 сообщений.
Идентификатор 802 типа сообщений определяет описание 804 сообщений в этом иллюстративном примере. Идентификатор 802 типа сообщений представляет собой тип сообщения в сообщениях 322 по ФИГ. 3. Описание 804 сообщений является примером описания сообщений в описаниях 502 сообщений по ФИГ. 5.
Например, описание 804 сообщений может быть сообщением типа 4, содержащим блок данных сегмента конечного этапа захода на посадку (final approach segment, FAS). В этом примере описание 804 сообщений может включать в себя параметры по меньшей мере для одного из следующего: длина набора данных, тип операции, идентификатор поставщика услуг, идентификатор аэропорта, номер взлетно-посадочной полосы, буквенное обозначение взлетно-посадочной полосы, указатель выполнения захода на посадку, указатель маршрута, селектор данных опорной траектории, идентификатор опорной траектории, широта места входной кромки взлетно-посадочной полосы/условного места входной кромки взлетно-посадочной полосы, долгота места входной кромки взлетно-посадочной полосы/условного места входной кромки взлетно-посадочной полосы, высота места входной кромки взлетно-посадочной полосы/условного места входной кромки взлетно-посадочной полосы, допустимая ошибка широты места выравнивания траектории полета, допустимая ошибка долготы места выравнивания траектории полета, высота пролета входной кромки взлетно-посадочной полосы при заходе на посадку, задатчик единиц пролета входной кромки взлетно-посадочной полосы при заходе на посадку, угол глиссады, ширина зоны входной кромки взлетно-посадочной полосы, смещение допустимой ошибки по длине, контроль циклической избыточности конечного этапа захода на посадку, или другие подходящие параметры для выдачи определения сообщений по типу 4.
В иллюстративном примере описание 804 сообщений может включать в себя параметры по меньшей мере для одного из следующего: период действия, флаг дополнительного сообщения, количество измерений, тип измерений, информация о поправке для низкой частоты, параметр декорреляции эфемерид, контроль циклической избыточности эфемерид источника дальности, информация о продолжительности доступности источника дальности и данных источника дальности для блоков множественных измерений, включая идентификатор источника дальности, выдача данных, поправка к псевдодальности, поправка к скорости изменения дальности, статистическая оценка сигнала в пространственных погрешностях, оценки погрешности в результате конкретных измерений опорного приемника на поправки к псевдодальности или другие подходящие параметры для выдачи определения 804 сообщений по типу 1.
Со ссылкой на ФИГ. 9 показана иллюстрация навигационной среды воздушного летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения. На ФИГ. 9 показан пример реализации компонентов в навигационной среде 200 для воздушного летательного аппарата.
В этом иллюстративном примере спутник 902 и спутник 904 являются примерами спутников в группе спутников 214 по ФИГ. 2. Спутник 902 и спутник 904 посылают спутниковые сигналы 212, которые позволяют опорному приемнику 906 и опорному приемнику 908 определять положения опорного приемника 906 и опорного приемника 908.
Как показано на чертежах, спутник 902 представляет собой часть первой группировки глобальной навигационной спутниковой системы. Спутник 904 в этом иллюстративном примере представляет собой часть второй группировки глобальной навигационной спутниковой системы. В иллюстративном примере спутниковые сигналы 212 включают в себя сигналы, посылаемые в первом диапазоне частот от спутника 902 и сигналы, посылаемые во втором диапазоне частот от спутника 904.
Как показано на чертежах, опорный приемник 906 принимает спутниковые сигналы 212 через группы антенн 910 и опорный приемник 908 принимает спутниковые сигналы 212 через группы антенн 912. Каждая антенна в группе антенн 910 и группе антенн 912 выполнена с возможностью приема одной или большего количества частей спутниковых сигналов 212. В этом иллюстративном примере каждая антенна в группе антенн 910 и группе антенн 912 расположена по меньшей мере на одном из следующего: штатив, опорный приемник, припаркованное транспортное средство или платформа любого другого типа для антенны для приема спутниковых сигналов 212.
В этом иллюстративном примере опорный приемник 906 отправляет спутниковые данные 914 на источник 304 навигационной информации. Опорный приемник 908 отправляет спутниковые данные 916 на источник 304 навигационной информации. Спутниковые данные 914 и спутниковые данные 916 являются примерами спутниковых данных 320 по ФИГ. 3.
Со ссылкой на ФИГ. 10 показана иллюстрация устройства обработки спутниковых данных в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере контроллер 1002 является примером реализации устройства 400 обработки спутниковых данных. В этом иллюстративном примере контроллер 1002 организует поток данных и сообщений между другими компонентами устройства 400 обработки спутниковых данных.
Как показано на чертежах, контроллер 1002 принимает команды 1004 управления от рабочего приложения 402. Команды 1004 управления предназначены для управления компонентами портативной системы 224 дифференциальной коррекции. Команды 1004 управления включают в себя по меньшей мере одно из следующего: команда для начала обработки спутниковых сигналов группой опорных приемников 308, команда для начала обработки спутниковых сигналов посредством выбранного опорного приемника в группе опорных приемников 308, команда для остановки обработки спутниковых сигналов группой опорных приемников 308, команда для остановки обработки спутниковых сигналов посредством выбранного опорного приемника в группе опорных приемников 308, команда на повторный пуск обработки спутниковых сигналов группой опорных приемников 308, команда на повторный пуск обработки спутниковых сигналов посредством выбранного опорного приемника в группе опорных приемников 308, команда для отправки параметров опорных приемников на выбранный опорный приемник в группе опорных приемников 308 и иные команды подходящего типа для обработки контроллером 1002.
Например, контроллер 1002 извлекает параметры 706 опорных приемников из ввода 700 данных опорных приемников в конфигурационных данных 406 и отправляет параметры 706 опорных приемников на опорный приемник, когда контроллер 1002 принимает команду для отправки параметров 706 опорных приемников на опорный приемник, определенный идентификатором 702 опорных приемников. Еще в одном примере контроллер 1002 начинает обработку спутниковых сигналов группой опорных приемников 308 по меньшей мере одним из следующего: подача питания на группу опорных приемников 308 или отправка группы команд на пуск на группу опорных приемников 308, когда контроллер 1002 принимает команду для начала обработки спутниковых сигналов группой опорных приемников 308.
Как показано на чертежах, устройство 1006 обработки данных является компонентом в устройстве 400 обработки спутниковых данных, который принимает спутниковые данные 320 от группы опорных приемников 308. В этом иллюстративном примере устройство 1006 обработки данных использует группу идентификаторов 1008 данных для анализа спутниковых данных 320. Каждый идентификатор данных в группе идентификаторов 1008 данных может быть уникальным для поставщика опорного приемника в группе опорных приемников 308.
Как показано на чертежах, идентификаторы 1008 данных определяют, как осуществить извлечение частей навигационной информации 220 из спутниковых данных 320. Группа идентификаторов 1008 данных может быть изменена специалистом-оператором посредством рабочего приложения 402. Группа идентификаторов 1008 данных может быть сохранена в конфигурационных данных 406.
В этом иллюстративном примере устройство 1006 обработки данных использует информацию о времени, встроенную в спутниковые данные 320, для добавления временных меток к частям навигационной информации 220, извлеченным из спутниковых данных 320. Как показано на чертежах, устройство 1006 обработки данных отправляет спутниковые данные 320 и навигационную информацию 220 на контроллер 1002 после извлечения навигационной информации 220 и добавления временных меток к частям навигационной информации 220.
Как показано на чертежах, контроллер 1002 использует устройство 1010 обработки для дифференциальной коррекции и навигационную информацию 220 для вычисления данных 232 поправок к псевдодальности. Например, устройство 1010 обработки для дифференциальной коррекции может определять данные 232 поправок к псевдодальности.
В этом иллюстративном примере контроллер 1002 использует монитор 1012 целостности для генерирования результатов 1014 измерения целостности. Как показано на чертежах, результаты 1014 измерения целостности основаны на спутниковых данных 320. Например, результаты 1014 измерения целостности могут быть использованы для определения, существует ли выдача в спутниковых данных 320 на основе нехарактерных изменений в спутниковых данных 320.
В иллюстративном примере контроллер 1002 использует формирователь 1016 сообщений для генерирования сообщений 322. Как показано на чертежах, формирователь 1016 сообщений генерирует сообщения 322 с использованием навигационной информации 220 в форматах, установленных описаниями 502 сообщений.
Как показано на чертежах, контроллер 1002 использует группу регистраторов 1018 данных для сохранения по меньшей мере одного из следующего: спутниковые данные 320, команды 1004 управления, конфигурационные данные 406, показатель 355, информация об исправности систем, сгенерированная различными компонентами в устройстве обработки спутниковых данных, или операции, выполненные компонентами устройства 400 обработки спутниковых данных, в хранилище 1020. Контроллер 1002 использует упаковщик 1022 данных для сохранения частей хранилища 1020 в хранилище 1024. Например, упаковщик 1022 данных может использовать универсальную последовательную шину (USB) для доступа к хранилищу 1024 для хранения части хранилища 1020 в хранилище 1024.
Иллюстрация навигационной среды 200 для воздушного летательного аппарата и различных компонентов в навигационной среде 200 для воздушного летательного аппарата по ФИГ. 2-10 не означает наложения физических или архитектурных ограничений на возможный способ осуществления иллюстративного варианта реализации изобретения. Могут быть использованы другие компоненты в дополнение или вместо проиллюстрированных. Некоторые компоненты могут быть излишними.
Также представлены блоки, чтобы проиллюстрировать некоторые функциональные компоненты. Один или большее количество этих блоков могут быть скомбинированы, разделены или скомбинированы и разделены на различные блоки при осуществлении в иллюстративном варианте реализации изобретения.
Например, источник питания может содержаться в источнике 304 навигационной информации или может быть отдельным компонентом. Источник питания соединен с группой опорных приемников 308, передающей системой 302 и источником 304 навигационной информации. Еще в одном примере компьютерная система 420 может находиться в другом месте, отличном от места расположения источника 304 навигационной информации.
Со ссылкой на ФИГ. 11 показана иллюстрация графического пользовательского интерфейса для управления конфигурационными данными в соответствии с иллюстративным вариантом реализации изобретения. Как показано на чертежах, графический пользовательский интерфейс 1102 представляет собой вариант реализации графического пользовательского интерфейса 422, показанного в форме блоков на ФИГ. 4.
Дисплей 1100 является примером дисплея в компьютерной системе 420 по ФИГ. 4, в которой присутствует графический пользовательский интерфейс 1102.
В этом иллюстративном примере "Опорный приемник" (reference receiver) 1104 представляет собой окно в графическом пользовательском интерфейсе 1102, используемом специалистом-оператором для задания необходимых уровней точности для опорных приемников в группе опорных приемников 308 и для задания параметров опорных приемников для опорных приемников в группе опорных приемников 308. Например, специалист-оператор имеет возможность выбрать опорный приемник в группе опорных приемников 308 посредством ввода идентификатора опорных приемников для опорного приемника в "Идентификаторе опорных приемников" (reference receiver identifier) 1106. В этом примере необходимый уровень точности для опорного приемника извлекают из конфигурационных данных 406 и показывают в "Необходимом уровне точности" (desired level of accuracy) 1108. Параметры опорных приемников для опорного приемника 1104 извлекают из конфигурационных данных 406 и показывают в "Параметрах опорных приемников" (reference receiver parameters) 1110.
Кроме того, в этом примере специалист-оператор имеет возможность задавать необходимый уровень точности для опорного приемника 1104. Например, необходимый уровень может быть задан путем редактирования необходимого уровня точности 1108 и задания параметров 1110 опорных приемников для опорного приемника 1104 путем редактирования параметров 1110 опорных приемников.
Как показано на чертежах, "Сохранить" (save) 1114 представляет собой кнопку в графическом пользовательском интерфейсе 1102, выбираемую специалистом-оператором для сохранения необходимого уровня точности для опорного приемника, показанного в "Необходимом уровне точности" 1108 и параметров для опорного приемника, показанных в "Параметрах опорных приемников" 1110 в конфигурационных данных 406. В этом иллюстративном примере "Отправить на приемник" (send to receiver) 1116 представляет собой кнопку в графическом пользовательском интерфейсе 1102, выбираемую специалистом-оператором для отправки необходимого уровня точности для опорного приемника, показанного в "Необходимом уровне точности", 1108 и параметров для опорного приемника, показанных в "Параметрах опорных приемников" 1110, на опорный приемник.
В этом иллюстративном примере "Ввод данных описания сообщений" (message definition entry) 1118 представляет собой окно в графическом пользовательском интерфейсе 1102, используемое специалистом-оператором для задания описаний сообщений, используемых устройством 400 обработки спутниковых данных для генерирования сообщений 322. Например, специалист-оператор имеет возможность выбирать описание сообщений в конфигурационных данных 406 путем ввода идентификатора типа сообщений для описания сообщений в идентификаторе 1120 типа сообщений. В этом примере описание сообщений, соответствующее идентификатору типа сообщений, извлекают из конфигурационных данных 406 и показывают в "Описании сообщений" (message definition) 1122. Кроме того, в этом примере специалист-оператор имеет возможность задавать описание сообщений, используемое устройством 400 обработки спутниковых данных, для генерирования сообщений, имеющих тип, соответствующий идентификатору 1120 типа сообщений, путем редактирования "Описания сообщений" 1122. Как показано на чертежах, "Сохранить" (save) 1126 представляет собой кнопку в графическом пользовательском интерфейсе 1102, выбираемую специалистом-оператором для сохранения описания сообщений, показанных в "Описании сообщений" 1122 в конфигурационных данных 406.
Со ссылкой на ФИГ. 12 показана иллюстрация графического пользовательского интерфейса для рабочего приложения портативной системы дифференциальной коррекции в соответствии с иллюстративным вариантом реализации изобретения. Дисплей 1200 является примером дисплея в компьютерной системе 420 по ФИГ. 4, в которой выполнен графический пользовательский интерфейс 1202. Как показано на чертежах, графический пользовательский интерфейс 1202 является вариантом реализации графического пользовательского интерфейса 422, показанного в форме блоков на ФИГ. 4. В этом иллюстративном примере группа опорных приемников показана на графическом пользовательском интерфейсе 1202 в виде таблицы 1204. Как показано на чертежах, таблица 1204 включает в себя идентификаторы опорных приемников для группы опорных приемников в столбце 1206, уровни точности для группы опорных приемников в столбце 1208, группу мест расположения группы опорных приемников в столбце 1210 и показатели соответствия указанной группы мест расположения группы опорных приемников необходимому уровню точности в столбце 1212. "Опорный приемник" 1214 (reference receiver) и "Опорный приемник" (reference receiver) 1216 в таблице 1204 являются примерами группы опорных приемников 308, показанной на ФИГ. 3.
Как показано на чертежах, "Пуск для всех" (start all) 1218 представляет собой кнопку в графическом пользовательском интерфейсе 1202, выбираемую специалистом-оператором для отправки команды на пуск на все опорные приемники, показанные в таблице 1204. "Остановка для всех" (stop all) 1219 представляет собой кнопку в графическом пользовательском интерфейсе 1202, выбираемую специалистом-оператором для отправки команды на остановку на все опорные приемники, показанные в таблице 1204. "Перезагрузка для всех" (reset all) 1220 представляет собой кнопку в графическом пользовательском интерфейсе 1202, выбираемую специалистом-оператором для отправки команды на повторный пуск на все опорные приемники, показанные в таблице 1204.
В этом иллюстративном примере "Пуск" (start) 1222 представляет собой кнопку в графическом пользовательском интерфейсе 1202, выбираемую специалистом-оператором для отправки команды на пуск на опорный приемник 1214. "Остановка" (stop) 1224 представляет собой кнопку в графическом пользовательском интерфейсе 1202, выбираемую специалистом-оператором для отправки команды на остановку на опорный приемник 1214. "Перезагрузка" (reset) 1226 представляет собой кнопку в графическом пользовательском интерфейсе 1202, выбираемую специалистом-оператором для отправки команды на повторный пуск на опорный приемник 1214. В этом иллюстративном примере "Пуск" (start) 1228 представляет собой кнопку в графическом пользовательском интерфейсе 1202, выбираемую специалистом-оператором для отправки команды на пуск на опорный приемник 1216. "Остановка" (stop) 1230 представляет собой кнопку в графическом пользовательском интерфейсе 1202, выбираемую специалистом-оператором для отправки команды на остановку на опорный приемник 1216. "Перезагрузка" (reset) 1232 представляет собой кнопку в графическом пользовательском интерфейсе 1202, выбираемую специалистом-оператором для отправки команды на повторный пуск на опорный приемник 1216.
Как показано на чертежах, "Конфигурация" (configure) 1234 представляет собой кнопку в графическом пользовательском интерфейсе 1202, выбираемую специалистом-оператором для отображения графического пользовательского интерфейса 1102 по ФИГ. 11 для управления конфигурацией для опорного приемника 1214. Так же, как показано, "Конфигурация" (configure) 1236 представляет собой кнопку в графическом пользовательском интерфейсе 1202, выбираемую специалистом-оператором для отображения графического пользовательского интерфейса 1102 по ФИГ. 11 для управления конфигурацией для опорного приемника 1216. В этом иллюстративном примере "Переключение на вид карты" (switch to map view) 1240 представляет собой кнопку в графическом пользовательском интерфейсе 1202, выбираемую специалистом-оператором для отображения еще одного типа графического пользовательского интерфейса, который показывает группу опорных приемников 308 на карте.
Со ссылкой на ФИГ. 13 показана иллюстрация графического пользовательского интерфейса для рабочего приложения портативной системы дифференциальной коррекции в соответствии с иллюстративным вариантом реализации изобретения. Дисплей 1300 является примером дисплея в компьютерной системе 420 по ФИГ. 4, в которой выполнен графический пользовательский интерфейс 1302. Как показано на чертежах, графический пользовательский интерфейс 1302 является вариантом реализации графического пользовательского интерфейса 422, показанного в форме блоков на ФИГ. 4. Например, графический пользовательский интерфейс 1302 может быть отображен, когда на ФИГ. 12 выбрано "Переключение на вид карты" 1240.
В этом иллюстративном примере карта 1304 на графическом пользовательском интерфейсе 1302 является представлением области, в которой расположена портативная система 224 дифференциальной коррекции. Например, картой 1304 может быть по меньшей мере одно из следующего: облако точек, топографическая карта, дорожная карта, карта погоды или карта иного подходящего типа, показывающая препятствия, которые снижают точность информации о месте расположения, полученной по спутниковым сигналам 212. При использовании в настоящем документе термин "Облако точек" обозначает совокупность точек данных в системе координат, представляющей участки поверхности.
Как показано на чертежах, карта 1304 включает в себя землю 1306, на которой расположены опорный приемник 1308, опорный приемник 131, и опорный приемник 1312. Опорный приемник 1308, опорный приемник 1310 и опорный приемник 1312 являются примерами опорных приемников 308.
В этом иллюстративном примере карта 1304 включает в себя взлетно-посадочную полосу 1314, гору 1316, здание 1318 и здание 1320. Как показано на чертежах, специалист-оператор может использовать показатель 1322 для определения необходимости изменения места группы опорных приемников. Показатель 1322 является примером показателя 355 по ФИГ. 3. В этом иллюстративном примере "Переключение на вид таблицы" (switch to table view) 1324 представляет собой кнопку в графическом пользовательском интерфейсе 1302, который отображает графический пользовательский интерфейс 1202 по ФИГ. 12.
Со ссылкой на ФИГ. 14 показана иллюстрация структурной схемы процесса для выработки навигационной информации в портативной системе дифференциальной коррекции в соответствии с иллюстративным вариантом реализации изобретения. Процесс, проиллюстрированный на ФИГ. 14, может быть реализован в портативной системе 224 дифференциальной коррекции.
Процесс начинается с приема спутниковых сигналов в группе опорных приемников в группе мест расположения (операция 1400). После этого процесс определяет необработанные данные псевдодальности и параметры спутниковых данных по спутниковым сигналам (операция 1402).
Затем процесс определяет уровень точности для группы опорных приемников на основе спутниковых данных (операция 1404). Процесс показывает, когда указанная группа мест расположения группы опорных приемников не соответствует необходимому уровню точности (операция 1406). Процесс генерирует сообщения с использованием навигационной информации по спутниковым данным, когда группа опорных приемников имеет необходимый уровень точности (операция 1408), после чего процесс заканчивают.
Операции 1400-1408 могут быть повторены любое количество раз для обработки дополнительных спутниковых сигналов в группе опорных приемников в указанной группе мест расположения. Кроме того, операции 1400-1408 могут быть повторены любое количество раз для обработки дополнительных спутниковых сигналов в группе опорных приемников в отличающейся группе мест расположения для группы опорных приемников.
Со ссылкой на ФИГ. 15 показана иллюстрация структурной схемы процесса для отправки навигационной информации от портативной системы дифференциальной коррекции в соответствии с иллюстративным вариантом реализации изобретения. Процесс, проиллюстрированный на ФИГ. 15, может быть реализован в портативной системе 224 дифференциальной коррекции.
Процесс начинается с приема спутниковых сигналов в группе опорных приемников в группе мест расположения (операция 1500). После этого процесс определяет необработанные данные псевдодальности и параметры спутниковых данных по спутниковым сигналам (операция 1502).
Затем процесс определяет уровень точности для группы опорных приемников на основе спутниковых данных (операция 1504). Процесс затем определяет, соответствует ли определенный таким образом уровень точности необходимому уровню точности (операция 1506).
Как показано на чертежах, при отсутствии соответствия необходимому уровню точности, процесс показывает, что указанная группа мест расположения группы опорных приемников не соответствует необходимому уровню точности (операция 1508), после чего процесс заканчивают. В противном случае, процесс генерирует сообщения с использованием навигационной информации по спутниковым данным (операция 1510). Процесс затем отправляет сгенерированные сообщения на воздушный летательный аппарат посредством передающей системы с использованием навигационной информации (операция 1512), после чего процесс заканчивают. Операции 1500-1512 могут быть повторены любое количество раз для обработки по меньшей мере одного из следующего: дополнительные спутниковые сигналы в группе опорных приемников в указанной группе мест расположения или дополнительные спутниковые сигналы в группе опорных приемников в отличающейся группе мест расположения для группы опорных приемников.
Со ссылкой на ФИГ. 16 показана иллюстрация структурной схемы процесса для выполнения контрольного самонаблюдения в соответствии с иллюстративным вариантом реализации изобретения. Процесс, проиллюстрированный на ФИГ. 16, может быть реализован в портативной системе 224 дифференциальной коррекции. В частности, различные операции могут быть выполнены устройством 405 контрольного самонаблюдения.
Процесс начинается включением группы опорных приемников (операция 1600). После этого процесс принимает группу мест расположения для части группы опорных приемников от указанной части (операция 1602).
Затем процесс принимает уровни точности для указанной группы мест расположения от указанной части (операция 1604). Процесс определяет, соответствуют ли уровни точности для указанной группы мест расположения для указанной части группе правил для группы необходимых уровней точности для группы опорных приемников (операция 1606).
Как показано на чертежах, при отсутствии соответствия группе правил, процесс показывает, что указанная группа мест расположения для указанной части группы опорных приемников не соответствует группе правил для группы необходимых уровней точности для группы опорных приемников (операция 1608), и процесс возвращают к операции 1602. При выдаче указания на то, что указанная группа мест расположения для указанной части группы опорных приемников не соответствует группе правил для группы необходимых уровней точности для группы опорных приемников, специалист-оператор имеет возможность использовать графический пользовательский интерфейс 422, чтобы определять информацию о группе опорных приемников. Кроме того, специалист-оператор может использовать устройство для генерирования облака точек области, в которой расположена группа приемников, для использования в качестве карты 1304 по ФИГ. 13. В противном случае, при наличии соответствия группе правил процесс показывает, что указанная группа мест расположения для указанной части группы опорных приемников соответствует группе правил для группы необходимых уровней точности для группы опорных приемников (операция 1610), после чего процесс заканчивают.
Операции 1602-1610 могут быть повторены любое количество раз. Например, операции 1602-1610 могут повторяться постоянно или когда произошло по меньшей мере одно из следующего: произошло изменение конфигурационных данных, произошло изменение указанной группы мест расположения для указанной части, прошло определенное время с момента последнего запуска процесса, специалист-оператор выбирает команду для выполнения контрольного самонаблюдения, или иные подходящие причины для повторения процесса.
Структурные схемы и блок-схемы в различных изображенных вариантах реализации изобретения иллюстрируют архитектуру, функциональность и работу некоторых возможных вариантов осуществления устройств и способов в иллюстративном варианте реализации изобретения. В этой связи, каждый блок в структурной схеме или блок-схеме может представлять по меньшей мере одно из следующего: модуль, сегмент, функцию, часть операции или этапа. Например, один или большее количество блоков могут быть реализованы в виде программного кода, в аппаратных средствах или комбинации программного кода и аппаратных средств. При реализации в аппаратных средствах они могут, например, принимать форму интегральных схем, которые изготовлены или выполнены с возможностью осуществления одной или большего количества операций в структурных схемах или блок-схемах. При реализации в виде комбинации программного кода и аппаратных средств реализация может принимать форму программно-аппаратных средств (firmware).
В некоторых альтернативных реализациях иллюстративного варианта изобретения, функция или функции, описанные в блоках, могут иметь место не в том порядке, который показан на фигурах чертежей. Например, в некоторых случаях два блока, показанные последовательно, могут быть выполнены по существу одновременно, или блоки иногда могут быть выполнены в обратном порядке, в зависимости от используемой функциональности. Также, другие блоки могут быть добавлены в дополнение к блокам, показанным на структурных схемах.
Например, дополнительные операции могут быть выполнены во время процесса, показанного на ФИГ. 16. В одном иллюстративном варианте реализации изобретения, после выполнения операции 1608 процесс может прекратить использование спутниковых данных от опорных приемников той части, которая имеет соответствующий уровень точности, который не отвечает необходимому уровню точности для опорных приемников.
Со ссылкой на ФИГ. 17 показана блок-схема системы обработки данных в соответствии с иллюстративным вариантом реализации изобретения. Система 1700 обработки данных может быть использована для реализации одного или большего количества компьютеров в компьютерной системе 338 по ФИГ. 3 или компьютерной системе 420 по ФИГ. 4, также других аппаратных средств, мобильных телефонов, планшетных компьютеров или компьютеров, которые могут реализовывать процессы, раскрытые в иллюстративных примерах. Как показано на чертежах, система 1700 обработки данных включает в себя инфраструктуру 1702 связи, которая обеспечивает сообщение между процессорным блоком 1704, устройствами 1706 хранения, блоком 1708 связи, блоком 1710 ввода/вывода и дисплеем 1712. В некоторых случаях инфраструктура 1702 связи может быть реализована в качестве системы на основе шины.
Процессорный блок 1704 выполнен с возможностью выполнения команд для программного обеспечения, чтобы выполнять множество операций. Процессорный блок 1704 может содержать множество процессоров, мультипроцессорное ядро и/или некоторые другие типы процессора, в зависимости от реализации. В некоторых случаях, процессорный блок 1704 может принимать форму блока аппаратных средств, такую как система замыкания, специализированная интегральная схема (ASIC), программируемое логическое устройство или некоторые другие подходящие типы блока аппаратных средств.
Команды для операционной системы, приложений и/или программ, запускаемых процессорным блоком 1704, могут быть расположены в устройствах 1706 хранения. Устройства 1706 хранения могут сообщаться с процессорным блоком 1704 через инфраструктуру 1702 связи. При использовании в настоящем документе устройство хранения, также обозначаемое как компьютерочитаемое устройство хранения, представляет собой любую часть аппаратных средств, выполненную с возможностью хранения информации на постоянной и/или временной основе. Эта информация может включать в себя, без ограничения, данные, программный код и иную информацию.
Примерами устройств 1706 хранения являются запоминающее устройство 1714 и устройство 1716 постоянного хранения. Запоминающее устройство 1714 может принимать форму, например, оперативного запоминающего устройства или энергозависимого или энергонезависимого устройства хранения иного типа. Устройство 1716 постоянного хранения может содержать любое количество компонентов или устройств. Например, устройство 1716 постоянного хранения может содержать жесткий диск, флэш-память, перезаписываемый оптический диск, перезаписываемую магнитную ленту или какую-либо комбинацию указанного выше. Носители, используемые устройством 1716 постоянного хранения, могут быть или могут не быть съемными.
Блок 1708 связи обеспечивает для системы 1700 обработки данных возможность сообщения с другими системами и устройствами обработки данных. Блок 1708 связи может обеспечивать коммуникацию с использованием физических линий связи, беспроводных линий связи, или некоторой их комбинации.
Блок 1710 ввода/вывода обеспечивает возможность приема входных данных от других устройств или отправки выходных данных на другие устройства, соединенные с системой 1700 обработки данных. Например, блок 1710 ввода/вывода может обеспечивать возможность приема входных пользовательских данных с помощью клавиатуры, мыши и/или устройства ввода какого-либо иного типа. В другом примере блок 1710 ввода/вывода может обеспечивать возможность отправки выходных данных на принтер, соединенный с системой 1700 обработки данных.
Дисплей 1712 выполнен с возможностью отображения информации для пользователя. Дисплей 1712 может содержать, например, без ограничения, монитор, сенсорный экран, лазерный дисплей, голографический дисплей, виртуальное дисплейное устройство или дисплейное устройство какого-либо иного типа.
В этом иллюстративном примере процессы различных иллюстративных вариантов реализации изобретения могут быть выполнены процессорным блоком 1704 с помощью команд, реализованных на компьютере. Эти команды могут быть называться как программный код, используемый компьютером программный код или компьютерочитаемый программный код и могут быть считаны или исполнены одним или большим количеством процессоров в процессорном блоке 1704.
В этих примерах программный код 1718 находится в функциональной форме на компьютерочитаемом носителе 1720, который выполнен с возможностью съема по выбору и может быть загружен или перемещен в систему 1700 обработки данных для выполнения процессорным блоком 1704. Программный код 1718 и компьютерочитаемый носитель 1720 вместе формируют компьютерный программный продукт 1722. В этом иллюстративном примере компьютерочитаемый носитель 1720 может представлять собой компьютерочитаемый носитель 1724 для хранения данных или компьютерочитаемый носитель 1726 для сигнала.
Компьютерочитаемый носитель 1724 для хранения данных является физическим или материальным устройством хранения, используемым для хранения программного кода 1718, а не средством, распространяющим или передающим программный код 1718. Компьютерочитаемый носитель 1724 для хранения данных может представлять собой, например, без ограничения, оптический или магнитный диск или устройство постоянного хранения, соединенное с системой 1700 обработки данных.
В альтернативном варианте реализации изобретения программный код 1718 может быть передан в систему 1700 обработки данных с использованием компьютерочитаемого носителя 1726 для сигнала. Компьютерочитаемый носитель 1726 для сигнала может представлять собой, например, распространяемый сигнал данных, содержащий программный код 1718. Этот сигнал данных может быть электромагнитным сигналом, оптическим сигналом и/или каким-либо другим типом сигнала, который может быть передан посредством физических и/или беспроводных линий связи.
Иллюстрация системы 1700 обработки данных по ФИГ. 17 не предназначена для создания архитектурных ограничений на способ, которым иллюстративные варианты изобретения могут быть реализованы. Указанные различные иллюстративные варианты реализации изобретения могут быть реализованы в системе обработки данных, которая включает в себя компоненты в дополнение или вместо тех, которые показаны в виде иллюстраций для системы 1700 обработки данных. Кроме того, компоненты, показанные на ФИГ. 17, могут отличаться от показанных иллюстративных примеров.
Таким образом, иллюстративные варианты реализации изобретения обеспечивают создание способа и устройства для обеспечения необходимого уровня портативности для систем дифференциальной коррекции. В одном или большем количестве иллюстративных примеров необходимо меньше времени и усилий для развертывания портативной системы дифференциальной коррекции с необходимым уровнем точности при генерировании данных поправок к псевдодальности. В одном иллюстративном примере процесс контрольного самонаблюдения, как описано выше, уменьшает необходимые предварительное планирование, время и усилия за счет устранения необходимости в контрольном наблюдении, обязательно выполняемом перед развертыванием портативной системы дифференциальной коррекции.
Описание различных иллюстративных вариантов реализации изобретения было представлено в целях иллюстрации и это описание и не является исчерпывающим или ограничивающим раскрытыми формами реализации настоящего изобретения. Многие модификации и изменения будут очевидны специалистам в данной области техники. Кроме того, различные иллюстративные варианты реализации изобретения могут обеспечивать различные признаки по сравнению с другими иллюстративными вариантами реализации изобретения. Вариант или варианты реализации изобретения выбраны и описаны для того, чтобы лучше объяснить принципы его осуществления, практическое применение и дать представление другим специалистам в данной области техники о различных вариантах с различными модификациями, которые подходят для конкретного использования изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И СИСТЕМА ПОСАДКИ НА ЕГО ОСНОВЕ | 2008 |
|
RU2371737C1 |
| Способ определения координат короткоживущего беспилотного летательного аппарата | 2020 |
|
RU2744723C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЕЙ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ РАЗМЕТКИ УЧАСТКОВ УЛИЧНО-ДОРОЖНОЙ СЕТИ | 2016 |
|
RU2633093C1 |
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2385469C1 |
| УСТРОЙСТВО И СПОСОБ ТРЕХМЕРНОГО ПОЗИЦИОНИРОВАНИЯ | 2011 |
|
RU2510046C2 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
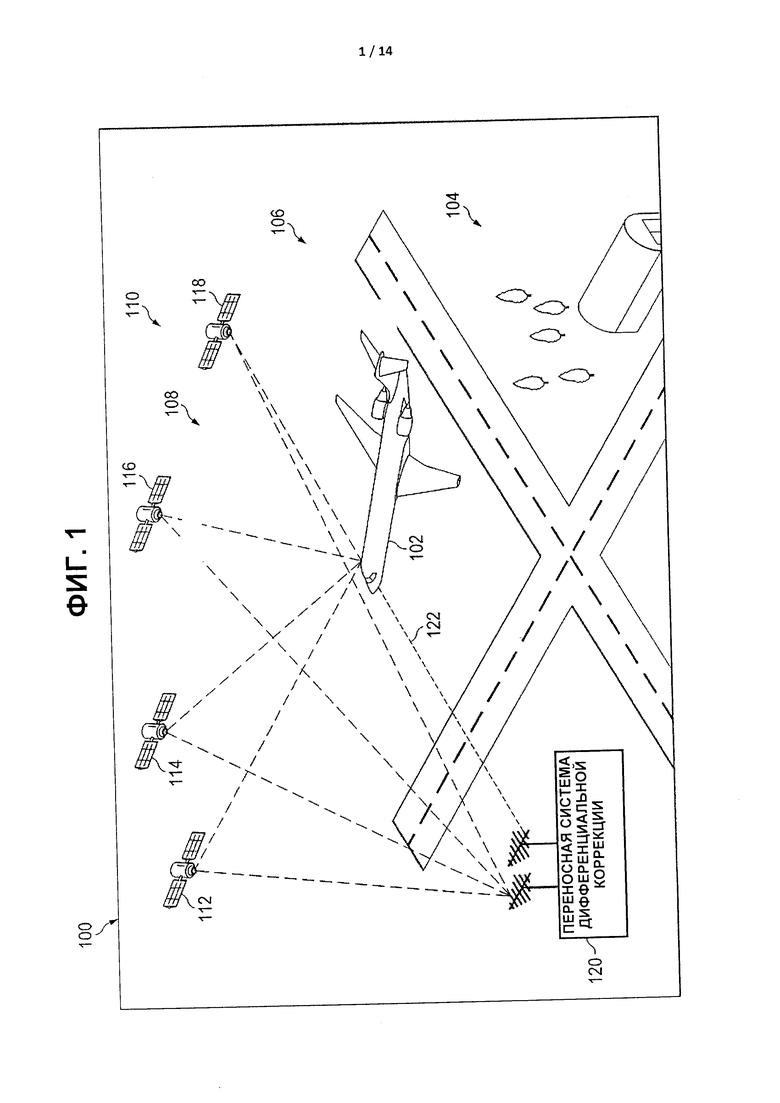
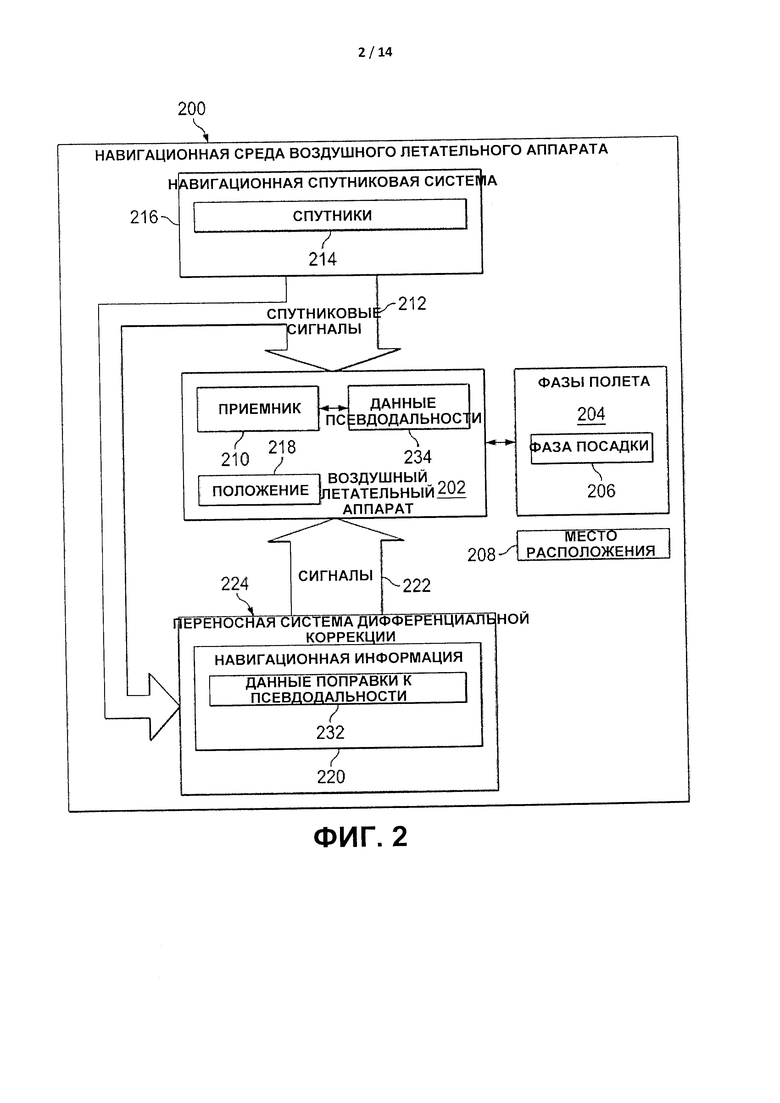
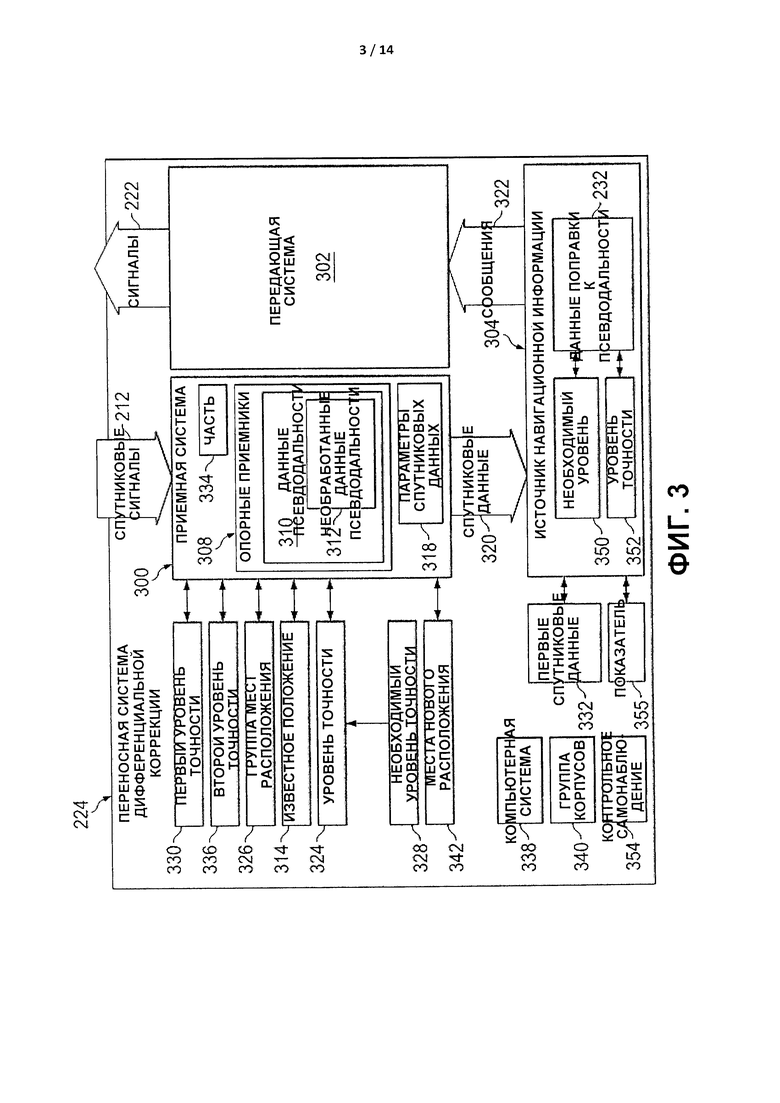
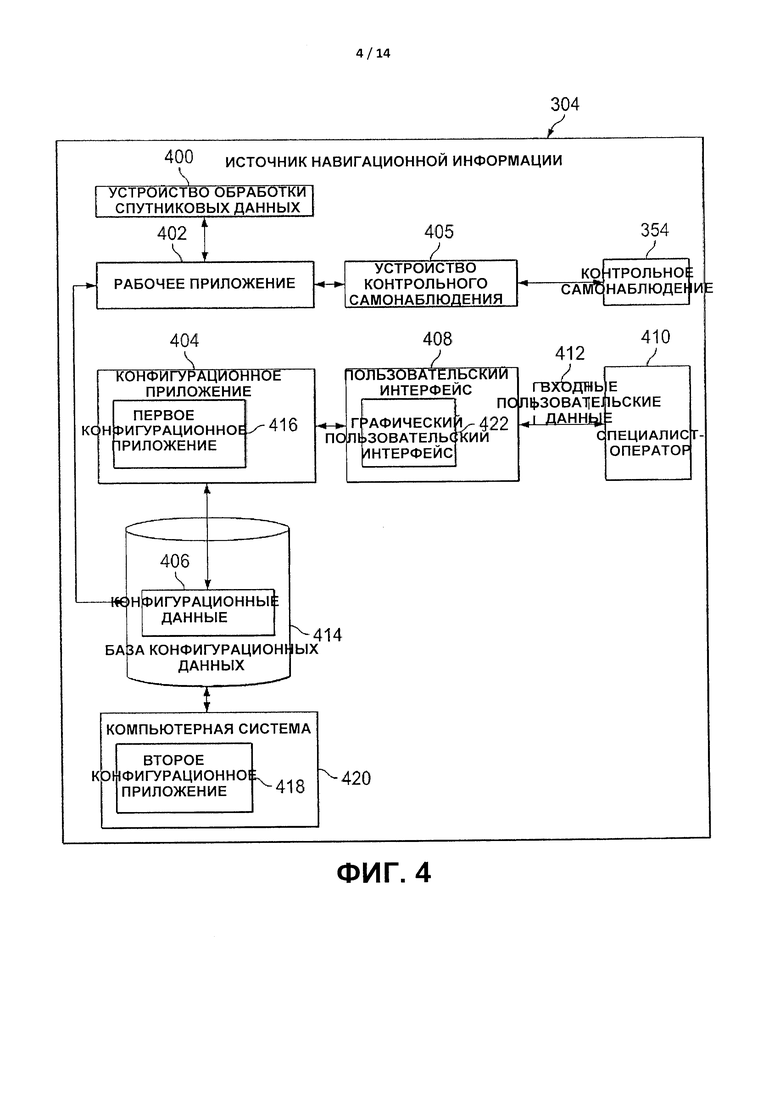
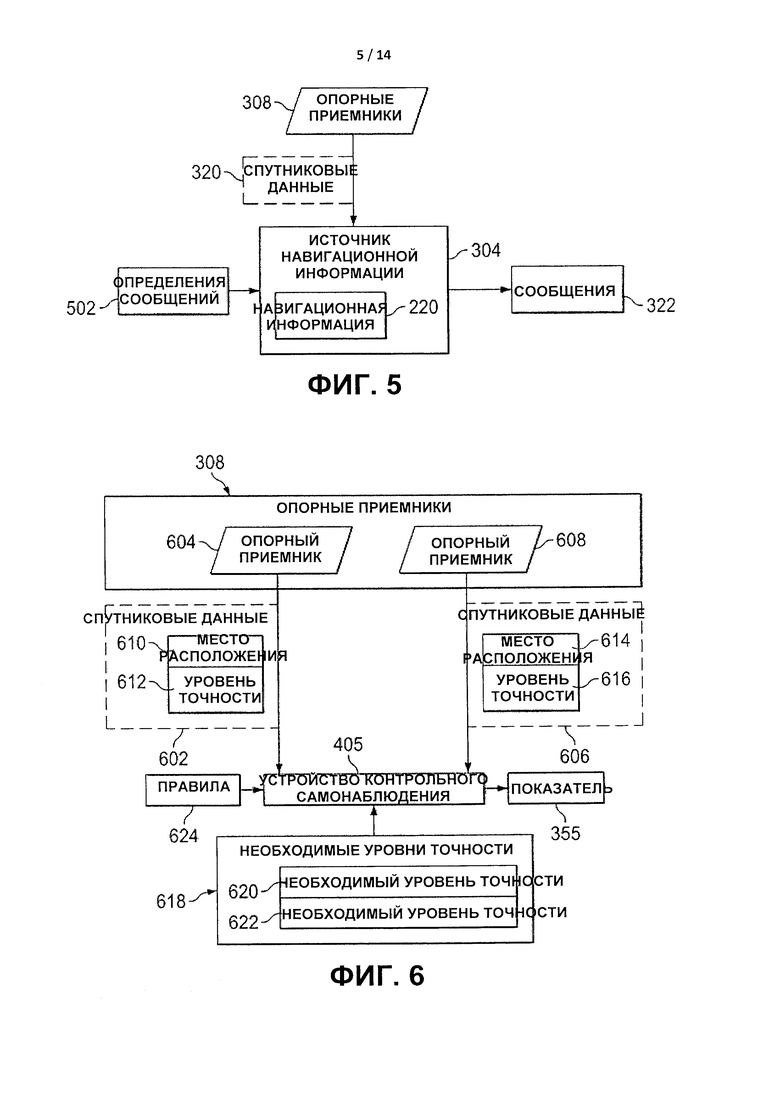
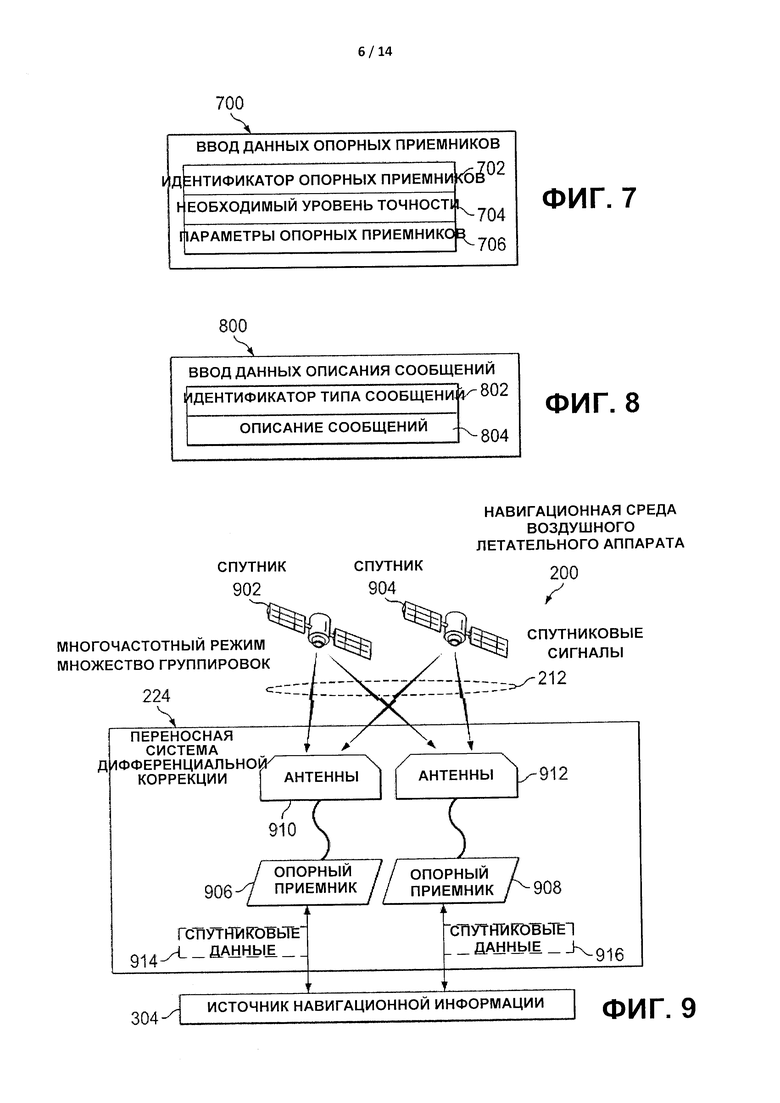
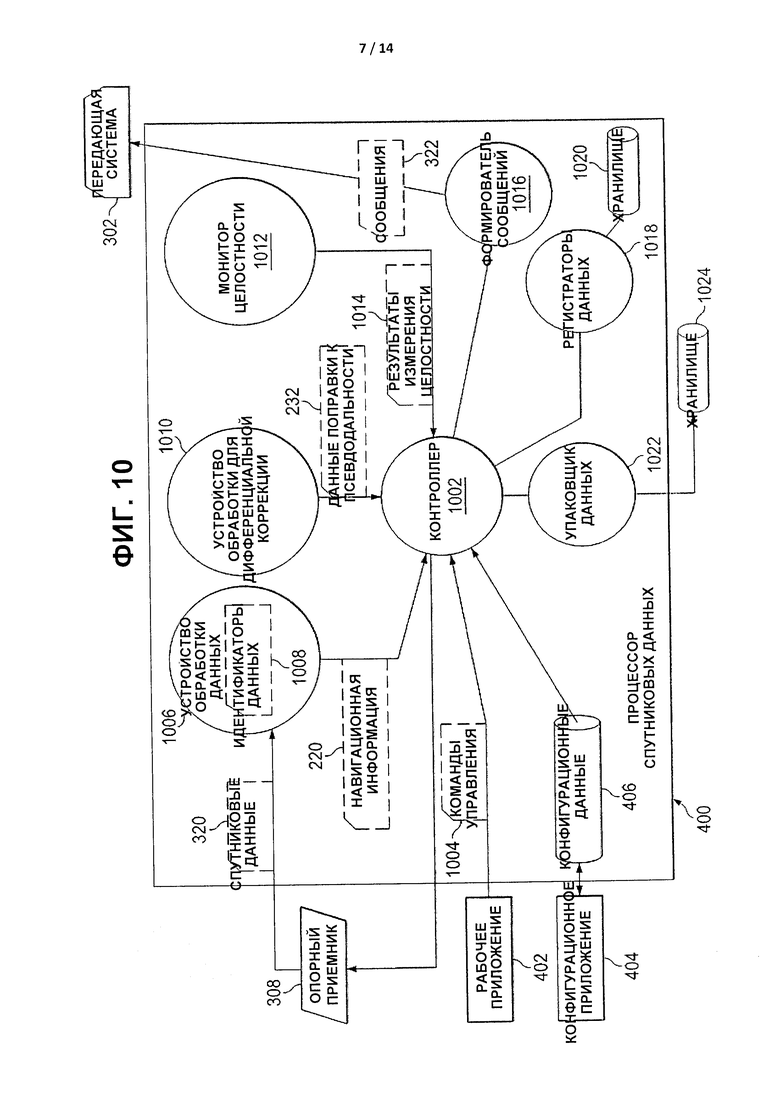
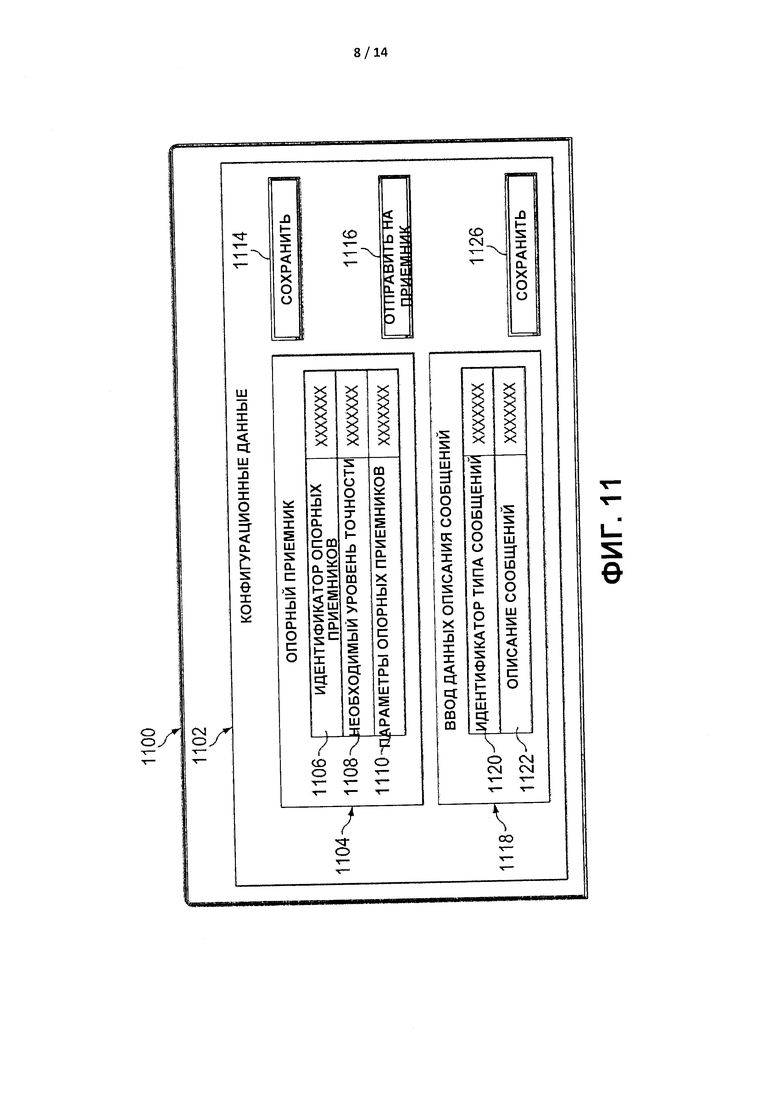
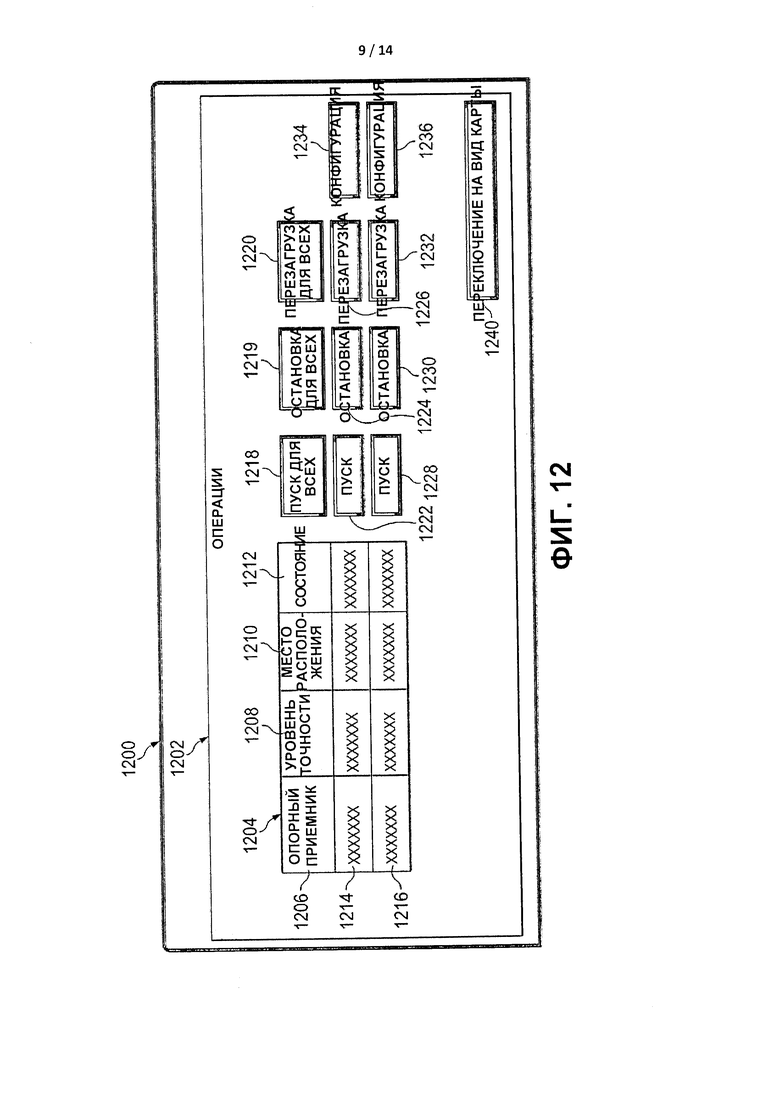
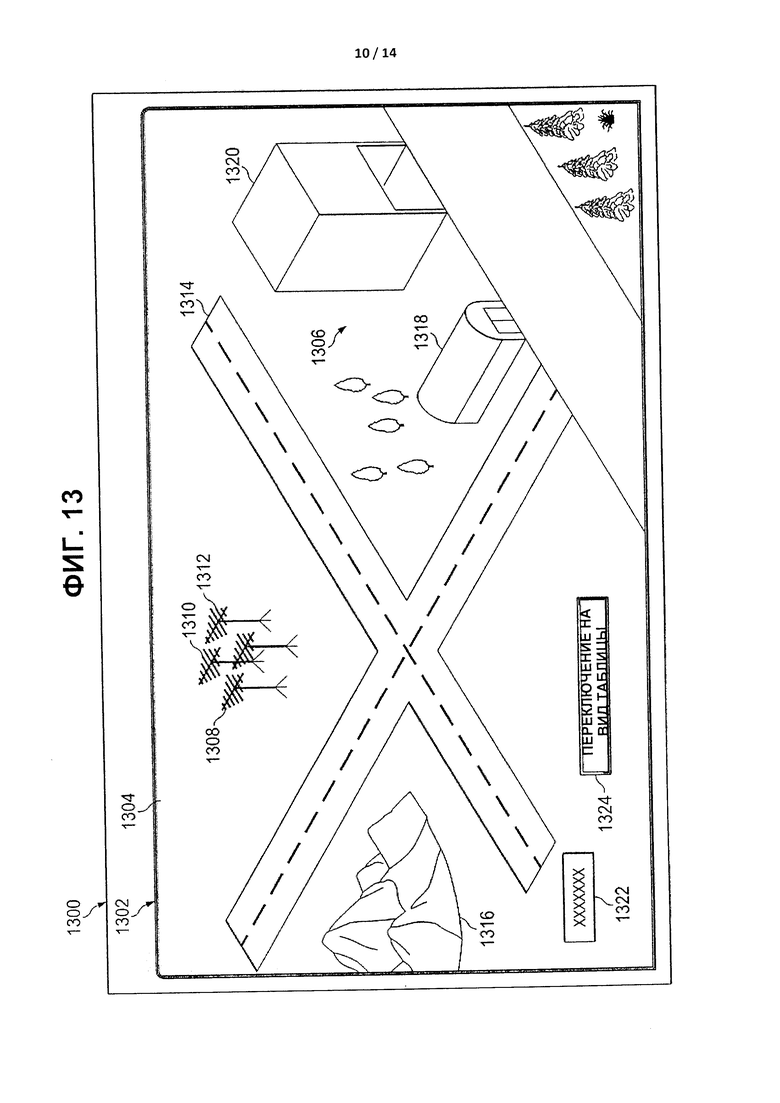
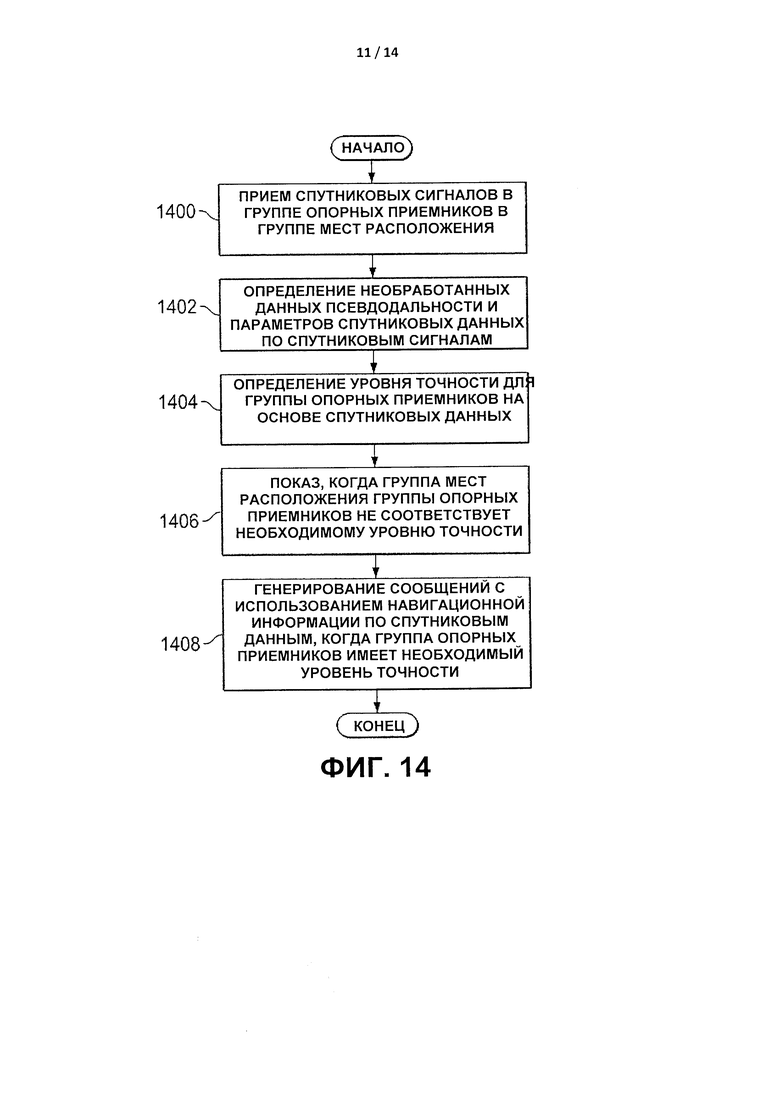
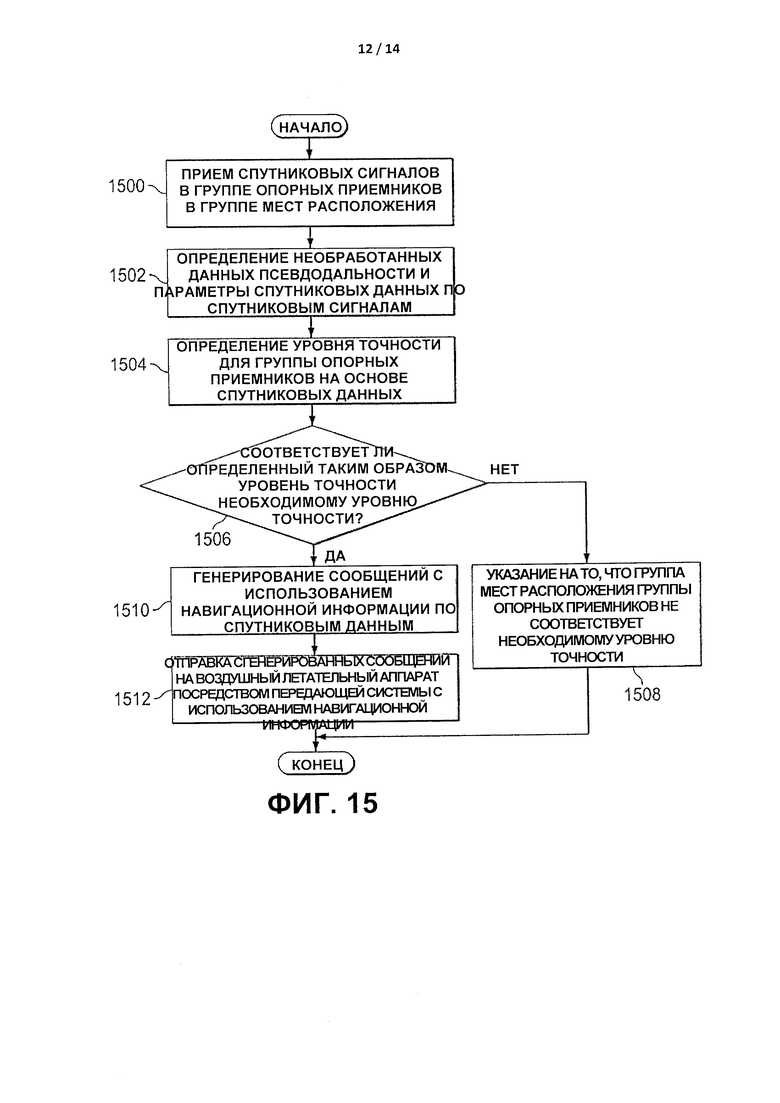
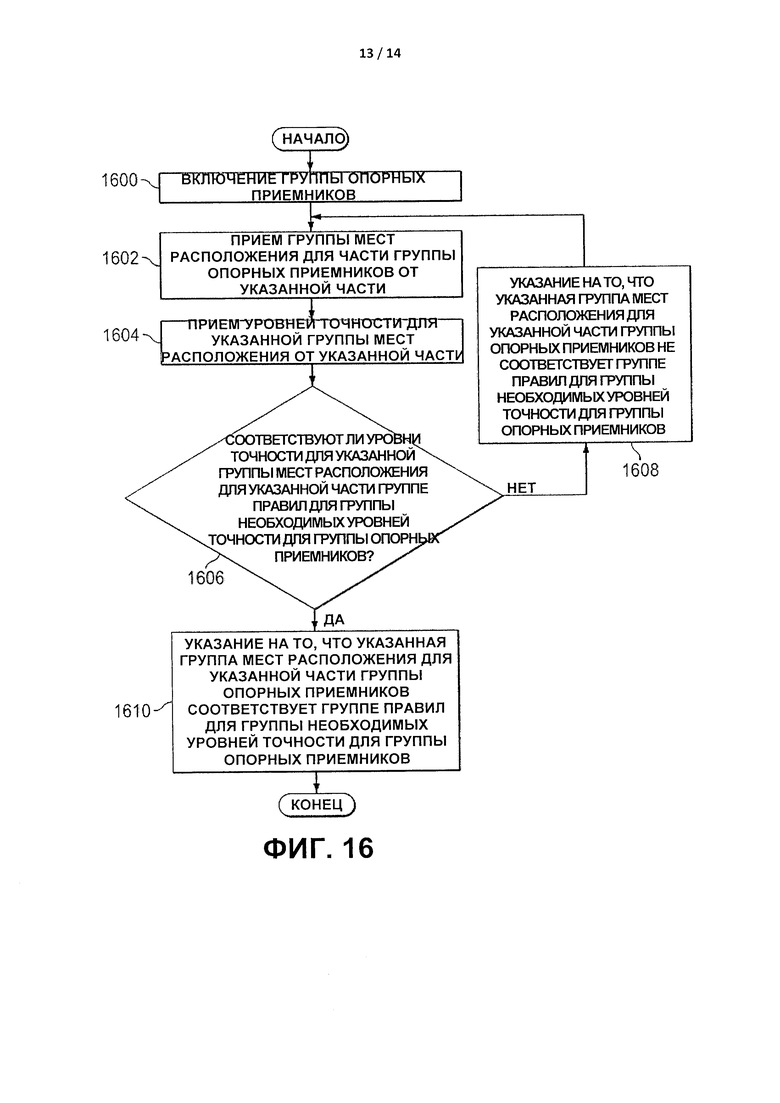
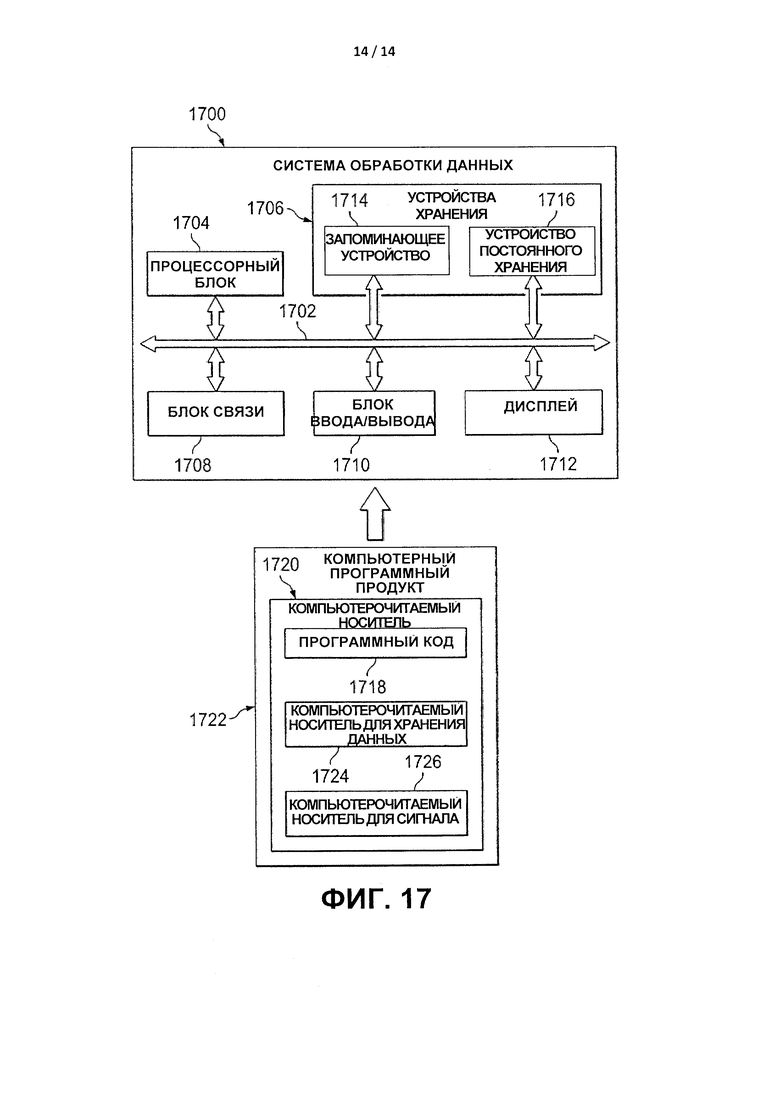
Изобретение относится к области навигационного приборостроения и может найти применение в системах навигации летательных аппаратов. Технический результат – расширение функциональных возможностей. Для этого обеспечивают формирование навигационной информации (220) для воздушного летательного аппарата (202) на основе приёма (1400) спутниковых сигналов (212) в группе опорных приемников (308) в группе мест расположения (326). Определяют (1404) уровень точности (352) для группы опорных приемников (308) на основе спутниковых данных (320), сформированных по спутниковым сигналам (212). Показывают (1406), когда указанная группа мест расположения (326) группы опорных приемников (308) не соответствует необходимому уровню точности (350). Генерируют (1408) сообщения (322) с использованием навигационной информации (220) по спутниковым данным (320), когда группа опорных приемников (308) имеет необходимый уровень точности (350). При этом источник (304) навигационной информации выполнен с возможностью приема спутниковых данных (320) от группы опорных приемников (308) и определения уровня точности (352) для группы опорных приемников (308) на основе спутниковых данных (320). Указанная группа мест расположения (326) является первой группой мест расположения (326), уровень точности (352) для группы опорных приемников (308) на основе спутниковых данных (320) является первым уровнем точности (330) для первой группы мест расположения (326) для группы опорных приемников (308), причем спутниковые данные (320) представляют собой первые спутниковые данные (332), а источник (304) навигационной информации выполнен с возможностью определения второго уровня точности (336) для группы опорных приемников (308) на основе вторых спутниковых данных (320), сформированных по спутниковым сигналам (212) от группы опорных приемников (308), после перемещения части (334) группы опорных приемников (308) во вторую группу мест расположения (326), которая отличается от первой группы мест расположения (326). Источник (304) навигационной информации также содержит устройство (405) контрольного самонаблюдения, выполненное с возможностью контрольного самонаблюдения (354) для определения группы мест расположения (326), где была размещена группа опорных приемников (308), и для показа, имеет ли уровень точности (330; 336) для группы опорных приемников (308) необходимый уровень точности (350) в указанной группе мест расположения (326), и выполнен с возможностью генерации сообщений (322) с использованием навигационной информации (220) по спутниковым данным (320), когда группа опорных приемников (308) имеет необходимый уровень точности (350). 3 н. и 6 з.п. ф-лы, 17 ил.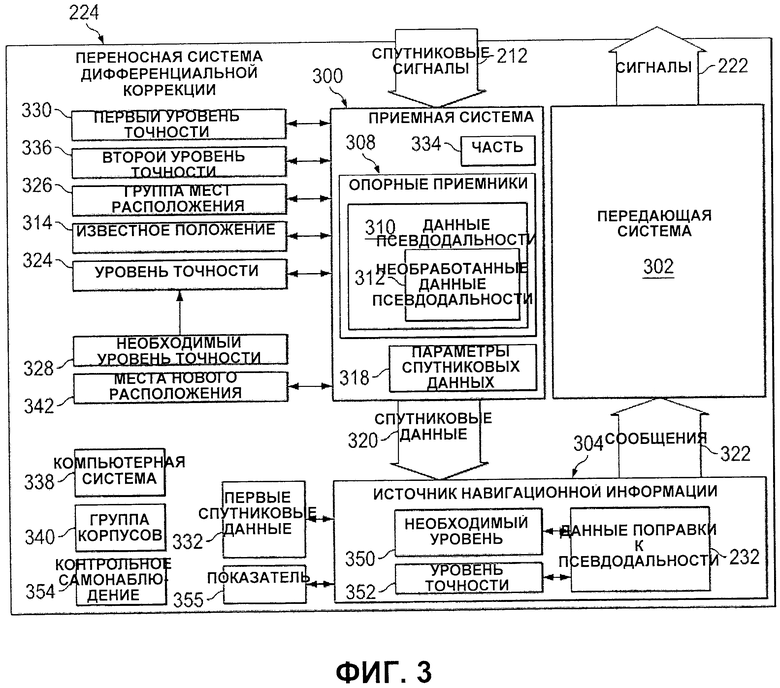
1. Портативная система (224) дифференциальной коррекции, содержащая:
группу опорных приемников (308) в группе мест расположения (326), которая выполнена с возможностью приема спутниковых сигналов (212) и определения необработанных данных (312) псевдодальности и группы параметров (318) спутниковых данных по спутниковым сигналам (212), при этом необработанные данные (312) псевдодальности и указанная группа параметров (318) спутниковых данных формируют спутниковые данные (320); и
источник (304) навигационной информации, который выполнен с возможностью приема спутниковых данных (320) от группы опорных приемников (308) и определения уровня точности (352) для группы опорных приемников (308) на основе спутниковых данных (320);
при этом указанная группа мест расположения (326) является первой группой мест расположения (326), уровень точности (352) для группы опорных приемников (308) на основе спутниковых данных (320) является первым уровнем точности (330) для первой группы мест расположения (326) для группы опорных приемников (308), причем спутниковые данные (320) представляют собой первые спутниковые данные (332), а
источник (304) навигационной информации выполнен с возможностью определения второго уровня точности (336) для группы опорных приемников (308) на основе вторых спутниковых данных (320), сформированных по спутниковым сигналам (212) от группы опорных приемников (308), после перемещения части (334) группы опорных приемников (308) во вторую группу мест расположения (326), которая отличается от первой группы мест расположения (326),
при этом источник (304) навигационной информации также содержит устройство (405) контрольного самонаблюдения, выполненное с возможностью контрольного самонаблюдения (354) для определения группы мест расположения (326), где была размещена группа опорных приемников (308), и для показа, имеет ли уровень точности (330; 336) для группы опорных приемников (308) необходимый уровень точности (350) в указанной группе мест расположения (326),
и выполнен с возможностью генерации сообщений (322) с использованием навигационной информации (220) по спутниковым данным (320), когда группа опорных приемников (308) имеет необходимый уровень точности (350).
2. Портативная система (224) дифференциальной коррекции по п. 1, также содержащая:
передающую систему (302), которая передает сообщения (322) на воздушный летательный аппарат (202), причем источник (304) навигационной информации отправляет сообщения (322) на воздушный летательный аппарат (202) посредством передающей системы (302).
3. Портативная система (224) дифференциальной коррекции по п. 1, в которой группа опорных приемников (308) выполнена с возможностью получения более чем одной частоты на спутник.
4. Портативная система (224) дифференциальной коррекции по п. 1, в которой группа опорных приемников (308) выполнена с возможностью приема спутниковых сигналов (212) от множества группировок спутников (214).
5. Портативная система (224) дифференциальной коррекции по п. 1, в которой навигационная информация (220) включает в себя по меньшей мере одно из следующего: информация о взлете, информация о посадке, информация о заходе на посадку или информация об уходе на второй круг.
6. Способ выработки навигационной информации (220) для воздушного летательного аппарата (202), согласно которому:
принимают (1400) спутниковые сигналы (212) в группе опорных приемников (308) в группе мест расположения (326);
определяют (1404) уровень точности (352) для группы опорных приемников (308) на основе спутниковых данных (320), сформированных по спутниковым сигналам (212);
при этом указанная группа мест расположения (326) является первой группой мест расположения (326), уровень точности (352) для группы опорных приемников (308) на основе спутниковых данных (320) является первым уровнем точности (330) для первой группы мест расположения (326) для группы опорных приемников (308), причем спутниковые данные (320) представляют собой первые спутниковые данные (332), а согласно указанному способу также
определяют второй уровень точности (336) для группы опорных приемников (308) на основе вторых спутниковых данных (320), сформированных по спутниковым сигналам (212) от группы опорных приемников (308), после перемещения части (334) группы опорных приемников (308) во вторую группу мест расположения (326), которая отличается от первой группы мест расположения (326),
выполняют контрольное самонаблюдение (354) для определения группы мест расположения (326), где была размещена группа опорных приемников (308), и показа, имеет ли уровень точности (330; 336) для группы опорных приемников (308) необходимый уровень точности (350) в указанной группе мест расположения (326), и
генерируют (1408) сообщения (322) с использованием навигационной информации (220) по спутниковым данным (320), когда группа опорных приемников (308) имеет необходимый уровень точности (350).
7. Способ по п. 6, также включающий:
отправление сообщений (322), сгенерированных с использованием навигационной информации (220), на воздушный летательный аппарат (202) посредством передающей системы (302).
8. Устройство для портативной системы (224) дифференциальной коррекции по любому из пп. 1-5, содержащее:
передающую систему (302), которая выполнена с возможностью передачи сообщений (322) на воздушный летательный аппарат (202);
рабочее приложение (402), которое выполнено с возможностью управления работой группы опорных приемников (308), передающей системы (302) и источника (304) навигационной информации; и
конфигурационное приложение (404), которое выполнено с возможностью приема входных пользовательских данных (412) для доступа.
9. Устройство по п. 8, также содержащее устройство (400) обработки спутниковых данных, которое выполнено с возможностью генерации поправок к псевдодальности с использованием спутниковых данных (320) для формирования навигационной информации (220).
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| WO 2013100902 A1, 04.07.2013 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 5054719 А1, 08.10.1991 | |||
| Способ многоканальной регистрации результатов измерений и устройство для его осуществления | 1990 |
|
SU1747905A1 |

