Изобретение относится к автоматизированным устройствам, обеспечивающим контроль и управление доступом физических объектов на контролируемую территорию.
Существует автоматический шлагбаум, содержащий установленный на тумбе с фундаментом электропривод, включающий в себя электродвигатель, связанный через редуктор с валом, на котором закреплен заградительный брус с катафотами и противовесом, отличающийся тем, что он снабжен гидрогасителем, связанным с валом с возможностью амортизации заградительного бруса при его опускании, масса противовеса выбрана с возможностью смещения центра масс заградительного бруса относительно оси вращения и создания момента силы тяжести, необходимого для опускания установленного в вертикальное положение бруса, а редуктор выполнен двухступенчатым, при этом в электропривод введена электромагнитная муфта, напрессованная на вал и помещенная в ступице зубчатого колеса второй ступени редуктора, первая ступень которого выполнена в виде червячной самотормозящей пары (RU 2094280 МПК B61L 29/00, 29/20).
Недостатками данного устройства являются его низкая надежность, обусловленная сложностью конструкции, включающей электродвигатель, двухступенчатый редуктор, первая ступень которого выполнена в виде червячной самотормозящей пары, а во второй ступени зубчатого колеса редуктора размещена ступица, содержащая напрессованную на вал электромагнитную муфту, заградительный брус с катафотами и противовесом, гидрогаситель, и низкая функциональная эффективность вследствие отсутствия устройства распознавания и идентификации физических объектов для предотвращения их несанкционированного доступа на контролируемую территорию.
Известен электромеханический преобразователь, выбранный в качестве прототипа и содержащий первичную обмотку, уложенную на наружной боковой поверхности магнитопровода цилиндрической формы. Внутри магнитопровода расположена вращающаяся короткозамкнутая вторичная обмотка, выполненная в виде полого цилиндра и являющаяся валом привода. Вращающаяся вторичная обмотка и магнитопровод разделены дополнительным теплоизолирующим элементом из антифрикционного неэлектропроводящего материала, выполняющего функцию радиально-упорного подшипника скольжения и составляющего единое целое с магнитопроводом и первичной обмоткой. На внутренней поверхности вторичной обмотки сформированы и жестко связаны с ней напорные лопасти. Магнитопровод охвачен наружным кожухом, при этом внешняя поверхность магнитопровода и внутренняя поверхность наружного кожуха образуют канал для теплоносителя (RU №87855, Н05В 6/10).
Недостатками данного устройства являются отсутствие возможности непосредственного использования вала электромеханического преобразователя в качестве заградительного элемента, что приводит к необходимости введения для этого дополнительных механических элементов, в целом уменьшающих надежность системы, и низкая функциональная эффективность, вследствие отсутствия возможности распознавания и идентификации физических объектов для предотвращения их несанкционированного доступа на контролируемую территорию.
Задача изобретения - обеспечение непосредственного использования вала электромеханического преобразователя в качестве заградительного элемента и возможности распознавания и идентификации физических объектов для предотвращения их несанкционированного доступа на контролируемую территорию.
Технический результат, достигаемый в процессе решения поставленной задачи, заключается в повышение надежности и функциональной эффективности пропускной системы.
Этот результат является следствием объединения вала электромеханического преобразователя и заградительного элемента системы и использования способа идентификации информации о физических объектах на контролируемой территории для формирования сигнала управления электромеханическим преобразователем.
В результате объединения вала электромеханического преобразователя и заградительного элемента пропускной системы повышается надежность системы, а применение способа идентификации с последующими анализом, обработкой и передачей данных для управления электромеханическим преобразователем пропускной системы, повышает ее функциональную эффективность и исключает несанкционированный доступ физических объектов на контролируемую территорию.
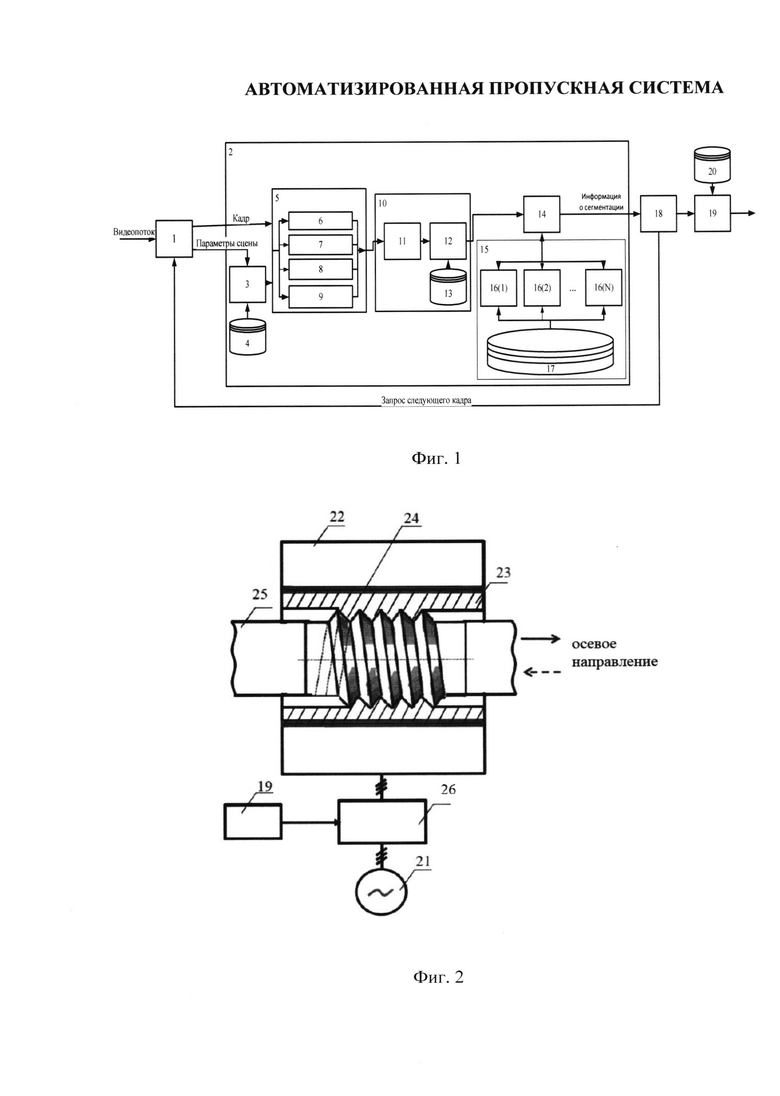
Сущность предлагаемого изобретения поясняют фигуры 1 и 2.
На фигуре 1 условно показана схема реализации способа идентификации, включающая блок получения кадра и параметров сцены 1, подсистему обработки кадра 2, модуль нечеткой корректировки изображения 3, корректирующую базу знаний 4, модуль предобработки 5, блок бинаризации 6, блок повышения контраста 7, блок шумоподавления 8, блок перевода в оттенки серого 9, модуль обобщенной сегментации 10, образованный сетью обобщенной сегментации 11, связывающей блок нечеткого обобщения 12 с обобщающей базой знаний 13, блок принятия решения о частной классификации 14, модуль частной классификации 15, сеть частной классификации 16(1)…16(N), базу данных частной классификации 17, подсистему агрегации описаний кадров 18, блок формирования управляющей команды 19, базу данных команд управления 20.
На фигуре 2 показан электромеханический преобразователь, получающий питание от трехфазной сети переменного тока 21. Электромеханический преобразователь состоит из магнитопровода с размещенной на нем сетевой обмоткой 22, вращающейся короткозамкнутой вторичной обмотки 23, на внутренней поверхности которой нанесена и жестко связана с обмоткой резьба, неподвижного элемента из антифрикционного неэлектропроводящего материала, выполняющего функцию радиально-упорного подшипника скольжения 24, вала 25. Вал 25 электромеханического преобразователя объединен с заградительным элементом пропускной системы (на чертеже заградительный элемент не показан). На валу 25 также нанесена резьба. При этом между вращающейся обмоткой 23 и валом 25 образовано резьбовое соединение. Электромеханический преобразователь подключен к трехфазной сети переменного тока 21 через устройство управления 26, на вход которого поступает сигнал от блока формирования управляющей команды 19 системы идентификации.
Автоматизированная пропускная система предназначена для контроля и предотвращения возможности несанкционированного доступа на охраняемую территорию с использованием способа идентификации видеоинформации о физических объектах, находящихся в зоне видеонаблюдения.
Автоматизированная пропускная система работает следующим образом.
На первом этапе анализируется видеоинформация, поступающая с контролируемой территории, с использованием способа идентификации, обеспечивающего формирование управляющего сигнала электромеханическим преобразователем пропускной системы, и основанного на извлечении кадра из видеопотока блоком получения кадра и параметров сцены 1. Далее кадр видеопотока поступает на вход подсистемы обработки кадра 2, которая после обработки выдает аннотированное (текстовое) описание содержащихся на нем объектов, а также их координаты. Затем информацию о параметрах сцены получает модуль нечеткой корректировки изображения 3 и на основании нечетких правил из корректирующей базы знаний 4, содержащей нечеткие правила реагирования на параметры сцены, формирует параметры фильтров для модуля предобработки 5, использующим для перевода изображения в черно-белое представление блок бинаризации 6, обеспечения контрастности изображения блок повышения контраста 7, очистки от шумов блок шумоподавления 8, содержащий адаптивные фильтры, перевода изображения в оттенки серого блок 9.
На следующем этапе предварительно обработанное изображение поступает на вход модуля обобщенной сегментации 10, который после выполнения обработки выдает изображение, сегментированное на различные классы по семантическому признаку.
Модуль обобщенной сегментации 10 для разделения изображения на отдельные группы пикселей, области, соответствующие одному объекту с одновременным определением типа объекта в каждой области, т.е. с выполнением многоклассовой классификации использует сеть обобщенной сегментации 11. В качестве сети обобщенной классификации могут быть использованы сверточные нейронные сети или сети классификаторы, обученные на большом количестве классов и использующие алгоритм сканирующего окна. Блок нечеткого обобщения 12 обобщает классы в более крупные семантические группы (например, возможные выводы сети: легковой автомобиль, грузовой автомобиль, автобус образуют группу «транспорт»; мужчина, женщина, ребенок образуют группу «люди» и т.п.). Правила формирования семантических групп содержатся в обобщающей базе знаний 13.
Сегментированное изображение поступает на вход блока принятия решения о частной классификации 14, который генерирует решение о передаче отдельных сегментов изображений на модуль частной классификации для уточнения результатов распознавания, например сегмент «транспорт» может быть передан одному из классификаторов для определения требуемых параметров: марка автомобиля, цвет, номер государственной регистрации и т.д. Функцию уточнения результатов распознавания выполняет модуль частной классификации 15, содержащий в себе набор специализированных алгоритмов-классификаторов (классификатор определения марки автомобиля, классификатор идентификации цвета, алгоритм распознавания номера государственной регистрации и т.д.). Модуль частной классификации 15 через сеть частной классификации 16(1)…16(N), использующей специализированные алгоритмы-классификаторы, запрашивает информацию в базе данных частной классификации 17 для специализированных алгоритмов-классификаторов (база марок транспортных средств, база цветов, база номеров государственной регистрации и т.д.).
Далее аннотированное (текстовое) описание содержащихся объектов в текущем кадре, а также их координаты поступают на вход подсистемы агрегации описаний кадров 18. После обработки нескольких кадров накопленная информация преобразуется в описание события происходящего в видеопотоке («транспорт» - останавливается/удаляется/приближается и т.д.) для формирования информации о происходящем в видеопотоке.
На основании описания происходящего в видеопотоке и информации хранящейся в базе данных команд управления блок формирования управляющей команды 19 формирует управляющую команду для автоматизированной пропускной системы. Для дополнительного повышения функциональной эффективности пропускной системы в данном способе идентификации предусмотрена база данных команд управления 20, содержащая штатные и нештатные ситуации и реакции на них, выражающиеся в виде команд управления.
После формирования управляющей команды автоматизированная пропускная система работает следующим образом.
В зависимости от сформированной управляющей команды на сетевую обмотку 22 через устройство управления 26, на интерфейс ввода которого поступает управляющая команда, сформированная блоком формирования управляющей команды 19, подается трехфазное напряжение от сети переменного тока 21. Проходящий при этом по обмотке 22 ток создает намагничивающую силу и переменное магнитное поле, наводящее на основании закона электромагнитной индукции электродвижущую силу и обусловленный ею вторичный ток, взаимодействующий с первичным магнитным полем. Это приводит к вращению вращающейся короткозамкнутой вторичной обмотки 23 относительно неподвижного элемента из антифрикционного неэлектропроводящего материала, выполняющего функцию радиально-упорного подшипника скольжения 24, обеспечивающего тангенциальное вращение и препятствующего осевому перемещению вращающейся обмотки. На внутренней поверхности вторичной обмотки 23 и наружной поверхности вала 25 нанесена резьба, вследствие этого между вращающейся обмоткой 23 и валом 25 существует подвижное резьбовое соединение, которое при вращении вторичной обмотки 23 обеспечивает осевое перемещение заградительного элемента, объединенного с валом электромеханического преобразователя в единое целое, в осевом направлении, что обеспечивает защиту от несанкционированного доступа физических объектов на контролируемую территорию.
Таким образом, объединение в единое целое вала электромеханического преобразователя и заградительного элемента автоматизированной пропускной системы повышает ее надежность, а использование способа идентификации, обеспечивающего формирование управляющего сигнала электромеханическим преобразователем, основанное на извлечении кадра из видеопотока, обработке кадра с выдачей аннотированного (текстового) описания содержащихся на нем объектов и их координат, нечеткой корректировке изображения, переводе изображения в черно-белое представление, обеспечении контрастности изображения, очистке от шумов, переводе изображения в оттенки серого, сегментации изображения по семантическому признаку с обращением к обобщающей базе знаний, уточнении результатов распознавания с использованием модуля частной классификации, формировании на основе обработанной информации управляющей команды для пропускной системы, приводит к повышению эффективности пропускной системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАСПОЗНАВАНИЯ ПОВЕДЕНИЯ | 2008 |
|
RU2475853C2 |
| СПОСОБ И СИСТЕМА РАСПОЗНАВАНИЯ ЭМОЦИОНАЛЬНОГО СОСТОЯНИЯ СОТРУДНИКОВ | 2021 |
|
RU2768545C1 |
| Система и способ обработки данных и распознавания объектов в режиме реального времени | 2022 |
|
RU2802280C1 |
| СПОСОБ РАСПОЗНАВАНИЯ И КЛАССИФИКАЦИИ ФОРМЫ ОБЪЕКТОВ В ЛАБИРИНТНЫХ ДОМЕННЫХ СТРУКТУРАХ | 2012 |
|
RU2522869C2 |
| АВТОМАТИЗИРОВАННАЯ МНОГОФУНКЦИОНАЛЬНАЯ СИСТЕМА АНАЛИЗА ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 2009 |
|
RU2408931C1 |
| СПОСОБ И СИСТЕМА РАСПОЗНАВАНИЯ ЛИЦ И ПОСТРОЕНИЯ МАРШРУТА С ПОМОЩЬЮ СРЕДСТВА ДОПОЛНЕННОЙ РЕАЛЬНОСТИ | 2019 |
|
RU2712417C1 |
| Устройство для семантической классификации и поиска в архивах оцифрованных киноматериалов | 2016 |
|
RU2628192C2 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОЙ ПРОВЕРКИ ПРИСУТСТВИЯ ЛИЦА ЖИВОГО ЧЕЛОВЕКА В БИОМЕТРИЧЕСКИХ СИСТЕМАХ БЕЗОПАСНОСТИ | 2005 |
|
RU2316051C2 |
| ИЗВЛЕЧЕНИЕ НЕСКОЛЬКИХ ДОКУМЕНТОВ ИЗ ЕДИНОГО ИЗОБРАЖЕНИЯ | 2020 |
|
RU2764705C1 |
| Способ обработки видео для целей визуального поиска | 2018 |
|
RU2693994C1 |
Изобретение относится к автоматизированным устройствам для контроля доступа. Автоматизированная пропускная система содержит заградительный элемент, объединенный в единое целое с валом электромеханического преобразователя, на внутренней поверхности вторичной обмотки и наружной поверхности вала преобразователя нанесена резьба, образующая подвижное резьбовое соединение между вращающейся обмоткой и валом, обеспечивающее перемещение в осевом направлении заградительного элемента при вращении вторичной обмотки. Причем питание на первичную обмотку электромеханического преобразователя подается через устройство управления, на вход которого поступает сигнал.. Управляющий сигнал выдается на основе идентификации видеопотока с использованием извлечения кадра из видеопотока, обработки кадра с выдачей аннотированного описания содержащихся на нем объектов и их координат, нечеткой корректировки изображения, перевода изображения в черно-белое представление, обеспечения контрастности изображения, очистки от шумов, перевода изображения в оттенки серого, сегментации изображения по семантическому признаку с обращением к обобщающей базе знаний и уточнения результатов распознавания с использованием модуля частной классификации. Достигается повышение надежности и функциональности пропускной системы. 2 ил.
Автоматизированная пропускная система, содержащая электромеханический преобразователь с магнитопроводом, сетевой обмоткой, подключаемой к источнику питания, неподвижным элементом из антифрикционного неэлектропроводящего материала, выполняющего функцию радиально-упорного подшипника скольжения, и вращающейся вторичной обмоткой, являющейся валом электромеханического преобразователя, и заградительный элемент, отличающаяся тем, что заградительный элемент объединен в единое целое с валом электромеханического преобразователя, а на внутренней поверхности вторичной обмотки и наружной поверхности вала нанесена резьба, образующая подвижное резьбовое соединение между вращающейся обмоткой и валом, обеспечивающее перемещение в осевом направлении заградительного элемента при вращении вторичной обмотки, при этом питание на первичную обмотку электромеханического преобразователя подается через устройство управления, на вход которого поступает сигнал после идентификации видеопотока с использованием извлечения кадра из видеопотока, обработки кадра с выдачей аннотированного (текстового) описания содержащихся на нем объектов и их координат, нечеткой корректировки изображения, перевода изображения в черно-белое представление, обеспечения контрастности изображения, очистки от шумов, перевода изображения в оттенки серого, сегментации изображения по семантическому признаку с обращением к обобщающей базе знаний и уточнения результатов распознавания с использованием модуля частной классификации.
| 0 |
|
SU158678A1 | |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ВЫЯВЛЕНИЯ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ ПРИ ПРОЕЗДЕ ПЕРЕКРЕСТКА, ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА ИЛИ ПЕШЕХОДНОГО ПЕРЕХОДА | 2015 |
|
RU2587662C1 |
| Самолет | 1929 |
|
SU17016A1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПРОПУСКОМ АВТОМОБИЛЕЙ ЧЕРЕЗ ЗАДАННУЮ ГРАНИЦУ | 2014 |
|
RU2599954C2 |
| CN 200977715 Y, 21.11.2007. | |||

