УРОВЕНЬ ТЕХНИКИ
1. ОБЛАСТЬ ТЕХНИКИ
Данное изобретение в целом относится к проведению измерений, связанных с изучением нефтегазоперспективных территорий. В частности, варианты реализации настоящего изобретения относятся к системам и способам измерения электромагнитных полей с целью обнаружения близлежащих стволов скважин, и для определения местоположений этих близлежащих стволов скважин.
2. УРОВЕНЬ ТЕХНИКИ
Сведения о структуре и свойствах геологического пласта облегчают бурение скважин, предназначенных для поиска и разведки месторождений газа и нефти. Кроме того, процесс бурения может быть улучшен благодаря использованию систем и способов обнаружения электропроводных объектов, расположенных под землей. Электропроводные объекты - это металлические конструкции, например, обсадные колонны и трубы, применяемые при выполнении подземных скважинных работ, при этом по обнаруженным металлическим конструкциям можно идентифицировать местоположение стволов скважин. Например, местоположения существующих стволов скважин могут влиять на бурильные работы в областях с большим скоплением скважин, где в силу правовых или территориальных ограничений скважины нужно бурить на небольшом расстоянии друг от друга. Иногда приходится обходить имеющиеся скважины при бурении в областях с большим скоплением скважин, и в некоторых случаях пересечение имеющихся скважин может быть преднамеренным, например, в целях ремонта поврежденного ствола скважины.
В других случаях определение положения существующих стволов скважин может облегчать бурение ствола скважины в предварительно заданном взаиморасположении по отношению к существующему стволу скважины. Например, в применениях, задействующих гравитационное дренирование при закачке пара (ГДЗП), ствол скважины зачастую бурят параллельно существующим стволам скважин. Обычно в ГДЗП-применениях используют пар и два, отдельных ствола скважин (ГДЗП-пара). Эта технология применяется для выдавливания тяжелой нефти. Пар с высокой температурой нагнетается в верхний ствол скважины (нагнетательная скважина) для нагрева тяжелой нефти с целью уменьшения ее вязкости. При этом усиливается поток тяжелой нефти в нижний ствол скважины (эксплуатационная скважина), чтобы приводит к увеличению добычи тяжелой нефти. Предпочтительно, нагнетательную и эксплуатационную скважины бурят на небольшом расстоянии друг от друга, например на расстоянии от 5 до 15 метров. Если нагнетательную скважину расположить слишком близко к эксплуатационной скважине, эксплуатационная скважина будет подвержена очень высокому давлению и температуре и пар будет непосредственно попадать в эксплуатационную скважину. Если же нагнетательную скважину расположить слишком далеко от эксплуатационной скважины, эффективность ГДЗП-процесса будет снижена. Чтобы обеспечить корректное расположение ствола нагнетательной скважины ГДЗП-пары относительно ствола эксплуатационной скважины, зачастую выполняется исследование геологического пласта. Применяемые в этом случае методы исследования обычно называют «дальнометрией». Зачастую применение методов дальнометрии может быть затруднено из-за близкого расположения множества стволов скважин, например, в тех местах, где может быть сложно отличить магнитные поля, вносящие свой вклад, обеспечиваемый целевым стволом скважины, от других близко расположенных существующих стволов скважин.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Настоящее изобретение подробно описано далее на основании вариантов реализации, представленных на прилагаемых графических материалах, на которых проиллюстрировано следующее:
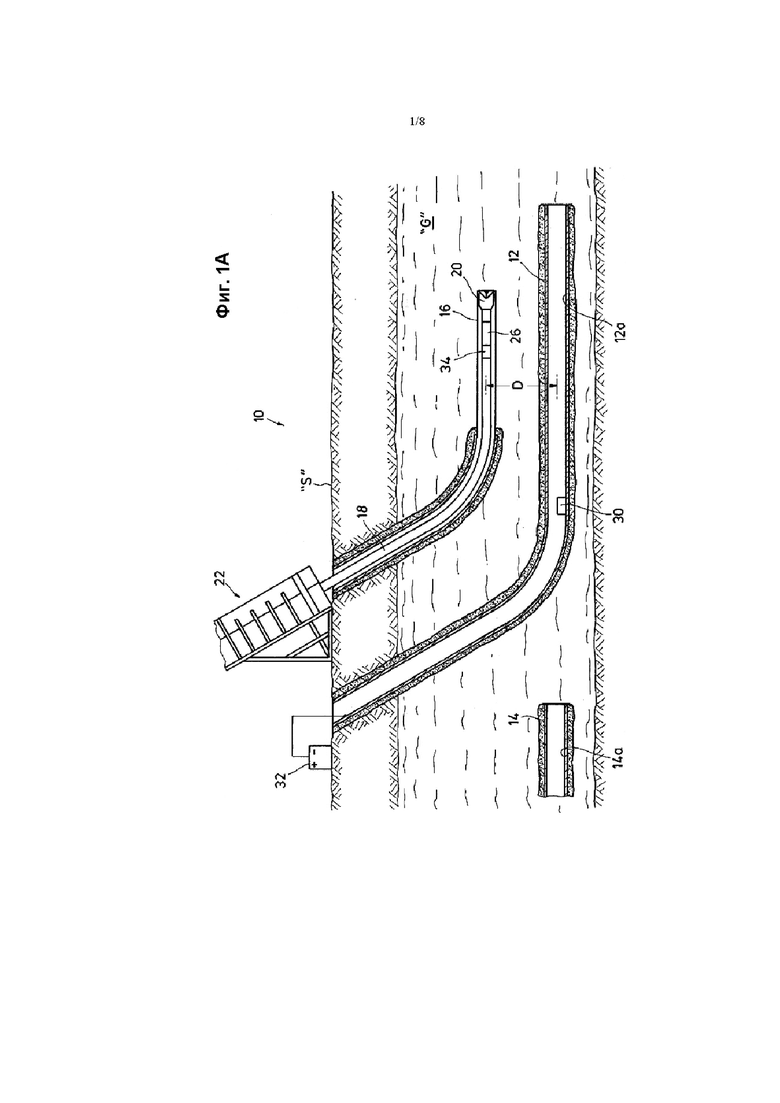
на Фиг. 1A проиллюстрирован схематический вид сбоку в разрезе системы стволов скважин, содержащей первый и второй существующие стволы скважин и третий ствол скважины, имеющий бурильную колонну или другое средство перемещения, снабженное прибором для дальнометрии, расположенным в нем в соответствии с одним или более приведенными в качестве примера вариантами реализации изобретения;
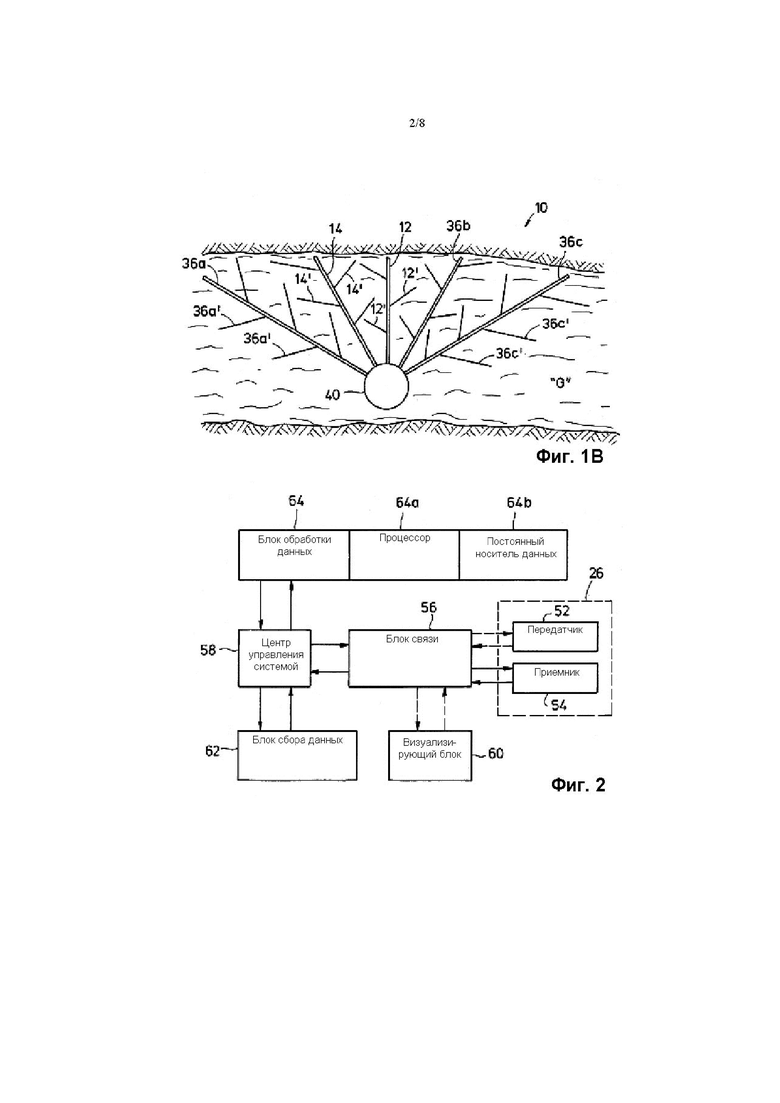
на Фиг. 1B проиллюстрирован схематический вид сверху в разрезе системы стволов скважин, проиллюстрированной на Фиг. 1A, на котором проиллюстрирована область с большим скоплением существующих стволов скважин, находящихся близко к первому, второму и третьему стволам скважин;
на Фиг. 2 проиллюстрирована схематическая структурная схема системы для определения количества и месторасположений множества стволов скважин, содержащая приемники прибора для дальнометрии, проиллюстрированного на Фиг. 1A, в соответствии с приведенными в качестве примера вариантами реализации изобретения;
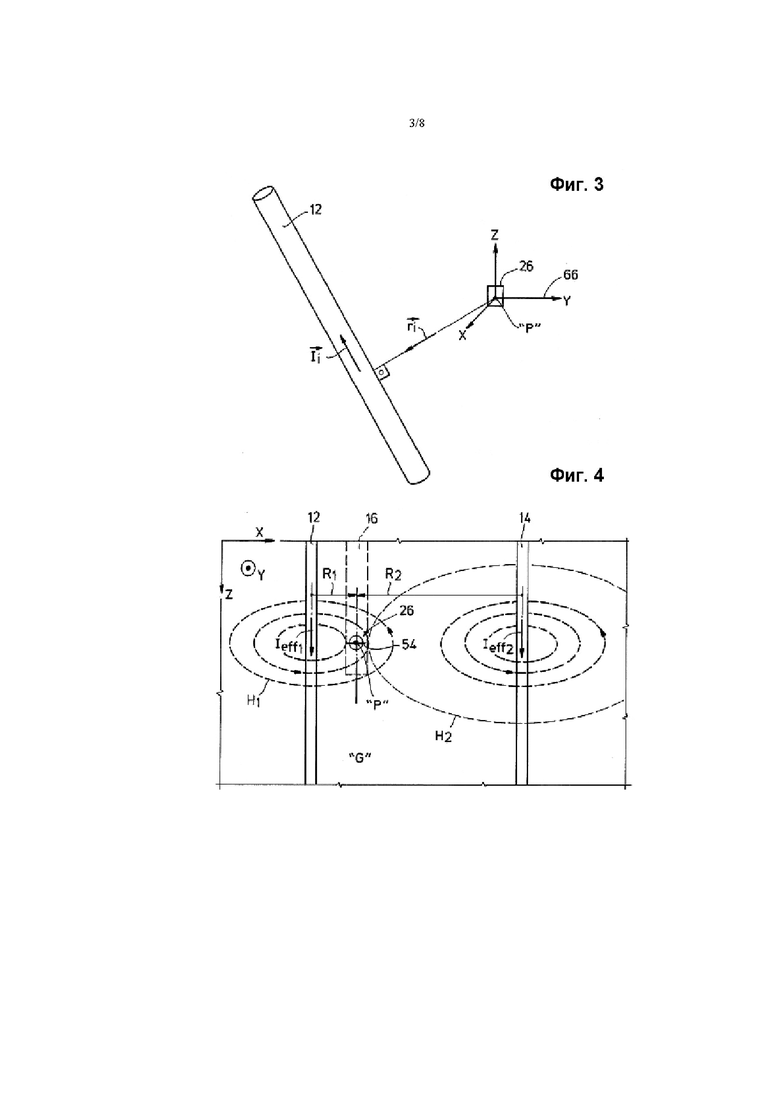
на Фиг. 3 проиллюстрирован схематический вид прибора для дальнометрии и первый ствол скважины, проиллюстрированный на Фиг. 1A, который иллюстрирует различные параметры первого ствола скважины, которые могут быть определены системой, проиллюстрированной на Фиг. 2;
на Фиг. 4 проиллюстрирован схематический вид прибора для дальнометрии и несколько стволов скважин сети, проиллюстрированной на Фиг. 1A, иллюстрирующий магнитные поля, обнаруживаемые прибором для дальнометрии;
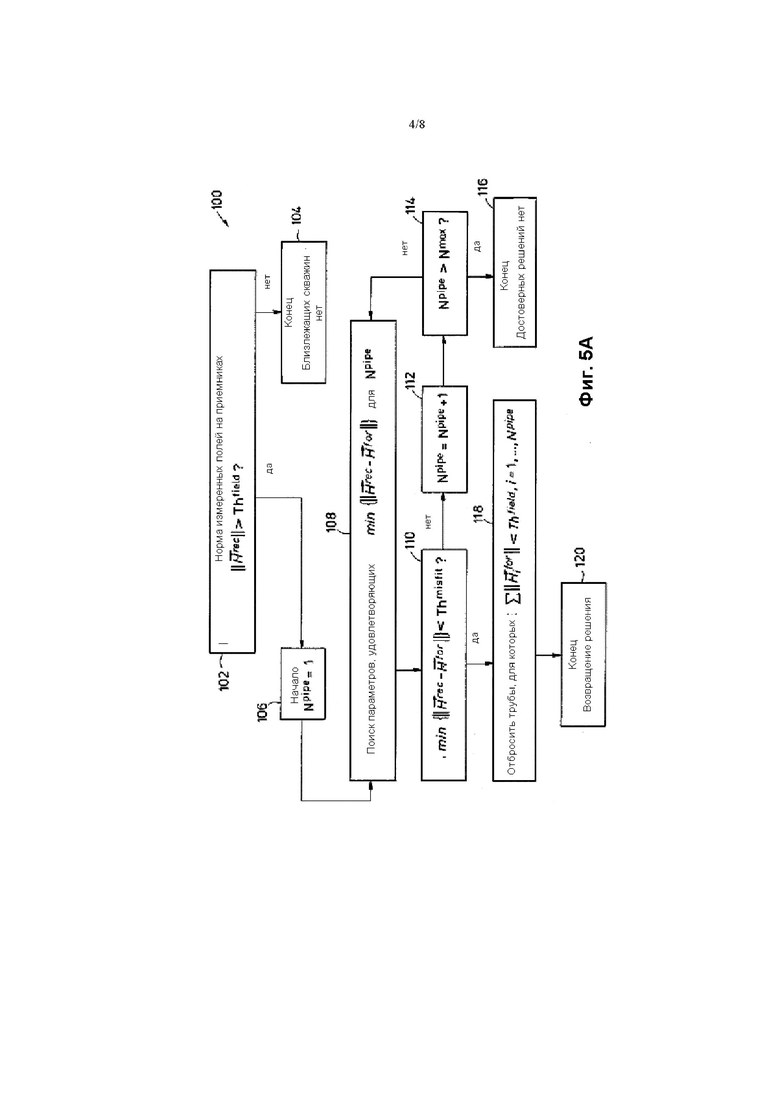
на Фиг. 5A и 5B проиллюстрированы блок-схемы, демонстрирующие технологические процедуры, которые включают определение местоположений множества стволов скважин в соответствии с приведенными в качестве примера вариантами реализации изобретения;
на Фиг. 6 проиллюстрирован представленный в виде графика математически смоделированный пример системы из двух стволов скважин, иллюстрирующий смоделированные кривые местоположения для первого и второго стволов скважин и смоделированную траекторию прибора для дальнометрии для определения соответствующих местоположений первого и второго стволов скважин с использованием инвертированной части технологической процедуры, проиллюстрированной на Фиг. 5A;
на Фиг. 7 проиллюстрирован схематический вид расположения датчиков для прибора для дальнометрии по Фиг. 6;
на Фиг. 8 проиллюстрирована представленная в виде графика смоделированная система из двух стволов скважин по Фиг. 6, иллюстрирующая точки позиционных данных, вычисленные для первого и второго стволов скважин, наложенные на соответствующие смоделированные кривые местоположения; и
на Фиг. 9A и 9B проиллюстрированы виды в виде графиков, иллюстрирующие данные, показывающие амплитуду тока, вычисленную для смоделированного тока в 1 ампер, протекающего соответственно через первый и второй стволы скважин, по Фиг. 6.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Чтобы не усложнять изложение, в этом описании приведены далеко не все признаки настоящей реализации или способа. Также «приведенные в качестве примера» варианты реализации, описанные в настоящем документе, относятся к примерам настоящего изобретения. В развитии любых таких настоящих вариантов реализации, для достижения определенных целей, которые могут меняться от одной реализации к другой, могут быть выполнены многочисленные специфичные для реализации решения. Специалисты в данной области техники легко осознают преимущество этого изобретения. В дальнейшем аспекты и преимущества различных вариантов реализации и связанных с ними способов в соответствии с изобретением станут очевидными из рассмотрения следующих далее описания и графических материалов.
В настоящем изобретении могут повторяться числовые позиции и/или буквенные обозначения в различных примерах. Эти повторения направлены на упрощение и ясность и сами по себе не диктуют взаимосвязь между различными рассматриваемыми вариантами реализации и/или конфигурациями. Кроме того, пространственно-относительные термины, такие как «ниже», «верхний», «выше по стволу», «ниже по стволу» и т.п. могут использоваться здесь для простоты описания для иллюстрирования взаиморасположения одного элемента или признака по отношению другому элементу(ам) или признаку(ам), как показано на чертежах. Пространственно-относительные термины направлены на охватывание разных ориентаций устройства при использовании или работе в дополнение к ориентации, проиллюстрированной графическими материалами.
1. ОПИСАНИЕ ПРИВЕДЕННЫХ В КАЧЕСТВЕ ПРИМЕРА ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
На Фиг. 1 проиллюстрирована система 10 с несколькими стволами скважин, содержащая первый ствол 12 скважины и второй ствол 14 скважины, сформированные в геологическом пласте «G». В некоторых приведенных в качестве примера вариантах реализации геологический пласт «G» представляет собой нефтеносный песок или другой пласт, содержащий тяжелую нефть, расположенную на относительно малой глубине, например,70–600 м ниже местоположения «S» на поверхности. Первый и второй стволы 12, 14 скважин могут быть применены для добычи тяжелой нефти из геологического пласта «G» с помощью таких процессов, как ГДЗП-операции. Системы и способы в соответствии с изложенной в настоящем документе идеей могут быть применены для обеспечения ГДЗП-направления, и такое ГДЗП-направление может быть также применено к негоризонтальным скважинам. Несмотря на то, что система 10 с несколькими стволами скважин описана в настоящем документе в отношении применения с ГДЗП-операциями, следует понимать, что аспекты настоящего изобретения также могут быть применены в сочетании с работами по дальнометрии в море или другими типами исследования.
Первый и второй стволы 12, 14 скважин содержат внутри себя соответствующие электропроводные объекты 12a, 14a. Электропроводные объекты 12a, 14a могут включать колонны обсадных труб, эксплуатационные колонны насосно-компрессорных труб или другие удлиненные металлические объекты, в которых могут возбуждаться электрические токи. Как будет подробнее описано далее, электрические токи, возбужденные в электропроводных объектах 12a, 14a в первом и втором стволах 12, 14 скважин, могут облегчать процессы магнитной дальнометрии для бурения третьего ствола 16 скважины вдоль траектории, имеющей предварительно заданное взаиморасположение с траекторией, определенной первым стволом 12 скважины. Предварительно заданное взаиморасположение может включать, например, в целом параллельное горизонтальное взаиморасположение для облегчения ГДЗП-операций. Позволяя расположить два или более стволов 12, 16 скважин в пределах очень жестких допусков, метод магнитной дальнометрии может помочь устранить неопределенность положения обычных исследований и обеспечить более точный допуск для ГДЗП-скважин. В других вариантах реализации предварительно заданное взаиморасположение может представлять собой пересекающееся взаиморасположение, где третий ствол 16 скважины пересекает первый ствол 12 скважины на предварительно заданной и/или фактической глубине, взаиморасположение в форме бокового ответвления, когда третий ствол 16 скважины ответвляется от первого ствола 12 скважины в предварительно заданном местоположении.
Первый ствол 12 скважины может быть реализован как «эксплуатационная скважина» в ГДЗП-системе, а третий ствол 16 скважины может быть реализован как «нагнетательная скважина» в ГДЗП-системе. Третий ствол 16 скважины бурят вблизи первого ствола 12 скважины на расстоянии «D» от него. В некоторых приведенных в качестве примера вариантах реализации расстояние «D» может находиться в диапазоне от около 5 до около 15 метров. Третий ствол 16 скважины бурят с помощью бурильной колонны 18, содержащей буровое долото 20, установленное на ее нижнем конце. Установка 22 наклонного бурения возвышается в местоположении «S» над поверхностью для поддержания бурильной колонны 18 под малыми углами, например, под углами в диапазоне от около 15° до около 75° от горизонтали. В некоторых приведенных в качестве примера вариантах реализации установка 22 наклонного бурения может поддерживать бурильную колонну 18 под углами от 0° до 90° (включительно) от горизонтали. Часто наклонное бурение применяют для облегчения доступа к геологическим пластам «G» малой глубины залегания, в которых заключена тяжелая нефть и в основном осуществляются ГДЗП-операции.
Прибор 26 для дальнометрии несет бурильная колонна 18. Прибор 26 для дальнометрии может быть применен для определения местоположения электропроводного объекта 12a внутри первого ствола 12 скважины, таким образом позволяя направлять буровое долото 20 так, чтобы поддерживать третий ствол 16 скважины на расстоянии «D» от первого ствола 12 скважины или в любом их пространственном взаиморасположении. Как более подробно описано ниже, прибор 26 для дальнометрии выполнен с возможностью идентифицировать магнитное поле, генерируемое отдельными электрическими токами, проходящими через электропроводные объекты 12a, 14a, и измерять параметры ствола скважины первого и второго ствола 12, 14 скважин для направления бурильной колонны 18. В некоторых приведенных в качестве примера вариантах реализации прибор 26 для дальнометрии может быть размещен независимо от бурильной колонны 18. Например, прибор 26 для дальнометрии может быть размещен в дополнительный существующий ствол скважины (не показан) посредством каната, гибких насосно-компрессорных труб малого диаметра или других известных способов. Альтернативно или дополнительно, прибор 26 для дальнометрии может быть размещен путем перемещения прибора 26 для дальнометрии через местоположение «S» на поверхности.
Электрические токи, распространяемые через электропроводные объекты 12a, 14a, могут быть возбуждены любым известным способом, например, с помощью использования скважинного источника 30 в виде электрода, или с помощью непосредственного соединения электропроводного объекта 12a с источником 32 тока в местоположении «S» на поверхности. В некоторых приведенных в качестве примера вариантах реализации токи могут быть дистанционно возбуждены рамочными антеннами 34, которые составляют часть бурильной колонны 18 или являются несомыми ею. В некоторых вариантах реализации электрические токи могут быть возбуждены передатчиками 52 (Фиг. 2), предусмотренными в приборе 26 для дальнометрии.
Как проиллюстрировано на Фиг. 1B, в некоторых приведенных в качестве примера вариантах реализации первый ствол 12 скважины в системе 10 с несколькими стволами скважин может иметь множество «елочных» или боковых стволов 12’ скважины, ответвляющихся от него. Боковые стволы 12’ скважины могут позволять осуществлять добычу с большей протяженности геологического пласта «G», чем только через первый ствол 12 скважины. Подобным образом, второй ствол 14 скважины может содержать боковой ствол 14’ скважины, ответвляющийся от него. Дополнительные стволы 36a - 36c скважины бурят в непосредственной близости к первому и второму стволам 12, 14 скважин и вместе с соответствующими боковыми стволами 36a’ - 36c’ скважин, стволы 12, 14 и 36a - 36c скважин могут обеспечивать добычу с относительно большой горизонтальной площади геологического пласта «G». Каждый из стволов 12, 14 и 36a - 36c скважин могут быть пробурены с относительно небольшого общего разбуриваемого участка 40. Поле стволов скважин, образованное стволами 12, 14 и 36a - 36c скважин, может быть охарактеризовано как область с большим скоплением скважин, в частности, возле общего разбуриваемого участка 40. При выполнении бурения третьего ствола 16 скважины через область с большим скоплением скважин, например, от разбуриваемого участка (точка A) до конечного края (точка B), количество «близлежащих» стволов скважин часто изменяется. В контексте настоящего документа «близлежащий ствол скважины» включает по меньшей мере ствол скважины, в котором возбуждается ток, который создает магнитное поле, обнаруживаемое прибором 26 для дальнометрии. Каждый из стволов 36a - 36c скважин и каждый из соответствующих стволов 36a’-36c’ скважин могут также содержать отдельный электропроводный объект (в явной форме не показан), который может генерировать магнитное поле, обнаруживаемое прибором 26 для дальнометрии. Таким образом, точная интерпретация электромагнитного поля, принятого и зарегистрированного прибором 26 для дальнометрии в любом конкретном местоположении, может включать определение количества стволов скважин, обеспечивающих вклад в принятое электромагнитное поле.
Обратимся к Фиг. 2 и продолжим обращаться к Фиг. 1A и 1B, где проиллюстрирована система 50 для определения количества, местоположений и/или других параметров ствола скважины нескольких стволов скважин. Эта система 50 может содержать передатчики 52 и приемники 54. В некоторых приведенных в качестве примера вариантах реализации передатчики 52 могут формировать часть прибора 26 для дальнометрии, и их может нести бурильная колонна 18 (Фиг. 1A). Передатчики 52 могут быть выполнены с возможностью генерирования электромагнитного зондирующего сигнала, который обеспечивает протекание тока в электропроводных объектах 12a, 14a (Фиг. 1A). В некоторых приведенных в качестве примера вариантах реализации передатчики 52 могут содержать сфокусированный электрический дипольный источник, индуцирующий электрический ток в электропроводном объекте 16, который является внешним по отношению к структуре передатчиков 52. В некоторых приведенных в качестве примера вариантах реализации передатчики 52 могут быть размещены независимо от прибора 26 для дальнометрии, например, посредством каната опущены в соседний ствол скважины 36b, или могут быть установлены в стационарном местоположении по отношению к геологическому пласту «G». В контексте настоящего документа термин «передатчик» может включать другие такие механизмы для индуцирования электрических токов в электропроводных объектах 12a и 14c (Фиг. 1A), такие как электрод 30 и/или источник 32 тока.
Приемники 54 могут содержать произвольные механизмы, которые детектируют, измеряют и/или собирают результаты замера магнитного поля для дальнейшей обработки. Например, могут быть применены рамочные антенны или магнитометры. Приемники 54 могут быть выполнены с возможностью измерения или сбора результатов для обработки электромагнитного поля, излучаемого одним или более электропроводными объектами 16 (Фиг. 1A), в результате зондирующего сигнала, сгенерированного передатчиками 52. Электропроводные объекты 12a, 14a и стволы 12, 14, 36a - 36c и 36a’ - 36c’ скважин, содержащие электропроводные объекты 12a, 14a, могут быть обнаружены по магнитному полю, и соответствующие местоположения и другие параметры ствола скважины могут определены тоже таким образом.
Система 50 также включает в себя блок 56 связи, который облегчает взаимодействие между центром 58 управления системой, визуализирующим блоком 60 и передатчиками 52 и приемниками 54. Блок 56 связи может предоставлять двунаправленную телеметрическую систему для связи между скважинными компонентами, например, прибором 26 для дальнометрии и компонентами, расположенными в местоположении «S» на поверхности, например, визуализирующим блоком 60. Блок 56 связи может использовать комбинации технологий проводной связи и технологий беспроводной связи на частотах, которые не виляют на текущие измерения, выполняемые прибором 56 для дальнометрии. Визуализирующий блок 60 может содержать компьютерные мониторы, принтеры или другие устройства, которые позволяют оператору в местоположении «S» на поверхности осуществлять контроль данных, генерируемых системой 50. Оператор может осуществлять контроль данных для определения того, необходимо ли вмешательство в систему 50.
Центр 58 управления системой может быть расположен внутри прибора 26 для дальнометрии, в другом местоположении в скважине или в местоположении «S» на поверхности, и может содержать компьютер с процессором и постоянным запоминающим устройством, связанным с ним. Центр 58 управления системой может управлять генерированием сигналов передачи, например, сигналов инструкций для передатчиков 52, и может управлять сбором принятых сигналов, например, сигналов данных от приемников 54, соответствующих сигналам передачи. Частотой, на которой генерируются сигналы передачи, может управлять центр 58 управления системой. Центр 58 управления системой также функционально связан с блоком 62 сбора данных и блоком 64 обработки данных. Блок 62 сбора данных может содержать аналого-цифровые преобразователи или другие механизмы для преобразования принятых сигналов в форму, которую может использовать центр 58 управления системой и/или блок 64 обработки данных.
Блок 64 обработки данных может преобразовывать принятые сигналы в информацию, показывающую количество, положение и характеристики направления стволов скважин в непосредственной близости от прибора 26 для дальнометрии, как описано более подробно ниже. Эта информация может передаваться в визуализирующий блок 60 для оценки ее оператором. В некоторых вариантах реализации блок 64 обработки данных может содержать процессор 64a и машиночитаемый носитель 64b данных, функционально соединенный с ним. Машиночитаемый носитель 64b данных может содержать энергонезависимое или постоянное запоминающее устройство с данными и командами, которые доступны процессору 64a и могут быть обработаны им. В одном или более вариантах реализации машиночитаемый носитель 64b данных предварительно запрограммирован предварительно заданными пороговыми значениями Thfield и Thmisfit, которые, как описано более подробно ниже, могут быть по меньшей мере частично зависимыми от характеристик прибора 26 для дальнометрии. Машиночитаемый носитель 64b данных также может быть предварительно запрограммирован изначально заданными последовательностями команд для выполнения различных этапов процедур 100, 200, описанных ниже со ссылками на Фиг. 5A и 5B.
Обратимся к Фиг. 3, где изображены параметры, связанные со стволом скважины, которые могут быть определены блоком 64 обработки данных (Фиг .2).Эти параметры включают параметры положения и направления, которые могут в полной мере определять местоположение ствола скважины в трехмерном пространстве. Только первый ствол 12 скважины изображен на Фиг. 3, хотя, каждый ствол скважины в системе 10 с несколькими стволами скважин может быть определен подобным набором параметров.
В одном или более вариантах реализации набор параметров ствола скважины может содержать векторный параметр  , который представляет ток, протекающий через ствол 12 скважины в осевом направлении ствола 12 скважины, и векторный параметр
, который представляет ток, протекающий через ствол 12 скважины в осевом направлении ствола 12 скважины, и векторный параметр  , представляющий расстояние по ортогонали между стволом 12 скважины и точкой отсчета “P”, определенной по отношению к прибору 26 для дальнометрии. Точка отсчета “P” изображена в центре системы 66 координат, и векторные параметры и могут быть определены по направлению относительно системы 66 координат. Нижний индекс “i” обозначает порядковый номер первого ствола 12 скважины, или в более общем случае, любого из стволов скважин в системе 10 с несколькими стволами скважин. Индекс “i” представляет собой целое число в диапазоне от 1 до Npipe, где Npipe - количество стволов скважин. Количество стволов скважин, представленное Npipe, может представлять собой общее количество стволов скважин в системе 10 с несколькими стволами скважин, количество близлежащих стволов скважин, которые вносят значительный вклад (определен более подробно ниже) в магнитное поле, обнаруженное прибором 26 для дальнометрии, или расчетное количество скважин. Оба векторных параметра и имеют три степени свободы, и, таким образом, существует по меньшей мере шесть переменных или «неизвестных» параметров в наборе параметров, связанном с первым стволом 12 скважины и каждой из Npipe скважин. Векторные параметры и могут быть определены системой 50, а другие параметры, такие как азимутальный угол и ориентация первого ствола 12 скважины, могут быть определены на основе векторных параметров и . Для направления прибора 26 для дальнометрии относительно первого ствола 12 скважины, определение силы тока, то есть амплитуды вектора тока, распространяющегося через первый ствол 12 скважины, не является обязательным требованием. Однако, как описано ниже, определение вектора тока может облегчить определение вклада первого ствола 12 скважины в поле, обнаруженное прибором 26 для дальнометрии.
, представляющий расстояние по ортогонали между стволом 12 скважины и точкой отсчета “P”, определенной по отношению к прибору 26 для дальнометрии. Точка отсчета “P” изображена в центре системы 66 координат, и векторные параметры и могут быть определены по направлению относительно системы 66 координат. Нижний индекс “i” обозначает порядковый номер первого ствола 12 скважины, или в более общем случае, любого из стволов скважин в системе 10 с несколькими стволами скважин. Индекс “i” представляет собой целое число в диапазоне от 1 до Npipe, где Npipe - количество стволов скважин. Количество стволов скважин, представленное Npipe, может представлять собой общее количество стволов скважин в системе 10 с несколькими стволами скважин, количество близлежащих стволов скважин, которые вносят значительный вклад (определен более подробно ниже) в магнитное поле, обнаруженное прибором 26 для дальнометрии, или расчетное количество скважин. Оба векторных параметра и имеют три степени свободы, и, таким образом, существует по меньшей мере шесть переменных или «неизвестных» параметров в наборе параметров, связанном с первым стволом 12 скважины и каждой из Npipe скважин. Векторные параметры и могут быть определены системой 50, а другие параметры, такие как азимутальный угол и ориентация первого ствола 12 скважины, могут быть определены на основе векторных параметров и . Для направления прибора 26 для дальнометрии относительно первого ствола 12 скважины, определение силы тока, то есть амплитуды вектора тока, распространяющегося через первый ствол 12 скважины, не является обязательным требованием. Однако, как описано ниже, определение вектора тока может облегчить определение вклада первого ствола 12 скважины в поле, обнаруженное прибором 26 для дальнометрии.
Как показано на Фиг. 4, первое магнитное поле H1 индуцируется действующим значением тока  , протекающим через первый ствол 12 скважины. Второе магнитное поле H2 индуцируется вторым действующим значением тока
, протекающим через первый ствол 12 скважины. Второе магнитное поле H2 индуцируется вторым действующим значением тока  , протекающего через второй ствол 14 скважины. Прибор 26 для дальнометрии расположен внутри третьего ствола 16 скважины на соответствующих радиальных расстояниях R1 и R2 от стволов 12 и 14 скважин. Прибор 26 для дальнометрии может содержать приемники 54 в форме трехосных рамочных антенн, то есть, набора из трех антенн, векторы магнитного момента которых образуют ортогональную систему, охватывающую все поле. Таким образом, прибор 26 для дальнометрии может быть чувствительным к полям H1 и H2, независимо от ориентации полей H1 и H2 по отношению к приемникам 54. Комбинированное магнитное поле, обнаруженное прибором 26 для дальнометрии, включает вклад от каждого из полей H1 и H2. Предположив, что стволы 12 и 14 скважин являются бесконечно длинными, и предположив, что действительные значения токов и является постоянными, каждое из магнитных полей H1 и H2 может быть выражено уравнением (1), приведенным ниже.
, протекающего через второй ствол 14 скважины. Прибор 26 для дальнометрии расположен внутри третьего ствола 16 скважины на соответствующих радиальных расстояниях R1 и R2 от стволов 12 и 14 скважин. Прибор 26 для дальнометрии может содержать приемники 54 в форме трехосных рамочных антенн, то есть, набора из трех антенн, векторы магнитного момента которых образуют ортогональную систему, охватывающую все поле. Таким образом, прибор 26 для дальнометрии может быть чувствительным к полям H1 и H2, независимо от ориентации полей H1 и H2 по отношению к приемникам 54. Комбинированное магнитное поле, обнаруженное прибором 26 для дальнометрии, включает вклад от каждого из полей H1 и H2. Предположив, что стволы 12 и 14 скважин являются бесконечно длинными, и предположив, что действительные значения токов и является постоянными, каждое из магнитных полей H1 и H2 может быть выражено уравнением (1), приведенным ниже.
В уравнении (1),  обозначает магнитное поле,
обозначает магнитное поле,  - единичный вектор в азимутальном направлении, и
- единичный вектор в азимутальном направлении, и  - вектор положения для приемников 54 (Фиг. 2) прибора 26 для дальнометрии. Несмотря на то, что уравнение (1) применяется как основа математической формулы, представленной далее, в некоторых приведенных в качестве примера вариантах реализации можно заменить уравнение (1) более точной версией уравнения путем включения в нее, например, осевых изменений тока, проходящего по трубе. Из уравнения (1) видно, что величина магнитного поля , идентифицированного прибором 26 для дальнометрии, может быть обратно пропорционально радиальным расстояниям R1 и R2 между стволами 12 и 14 скважин и приемниками 54. Продемонстрированные предположения о бесконечной длине и постоянных токах дают достаточно точные приближения параметров ствола скважины, используемых для правильного выбора направления. В частности, эти предположения дают относительно точные приближения параметров ствола скважины для стволов скважин, которые являются близлежащими к приемникам 54, где радиальные расстояния R1 и R2 являются наименьшими, и где точность может быть относительно значимой для направления. Формула магнитных полей, приведенная в уравнении (1), таким образом применяется по всему этому описанию. Тем не менее, если доступны другие описания магнитных полей, излученных от стволов скважин, эти описания могут быть применены без отхода от идеи и объема настоящего изобретения.
- вектор положения для приемников 54 (Фиг. 2) прибора 26 для дальнометрии. Несмотря на то, что уравнение (1) применяется как основа математической формулы, представленной далее, в некоторых приведенных в качестве примера вариантах реализации можно заменить уравнение (1) более точной версией уравнения путем включения в нее, например, осевых изменений тока, проходящего по трубе. Из уравнения (1) видно, что величина магнитного поля , идентифицированного прибором 26 для дальнометрии, может быть обратно пропорционально радиальным расстояниям R1 и R2 между стволами 12 и 14 скважин и приемниками 54. Продемонстрированные предположения о бесконечной длине и постоянных токах дают достаточно точные приближения параметров ствола скважины, используемых для правильного выбора направления. В частности, эти предположения дают относительно точные приближения параметров ствола скважины для стволов скважин, которые являются близлежащими к приемникам 54, где радиальные расстояния R1 и R2 являются наименьшими, и где точность может быть относительно значимой для направления. Формула магнитных полей, приведенная в уравнении (1), таким образом применяется по всему этому описанию. Тем не менее, если доступны другие описания магнитных полей, излученных от стволов скважин, эти описания могут быть применены без отхода от идеи и объема настоящего изобретения.
Когда прибор 26 для дальнометрии размещен, каждый приемник 54 может выполнять отдельные измерения общего магнитного поля . Количество приемников 54, предусмотренное на приборе 26 для дальнометрии, может быть обозначено Nrec. В некоторых приведенных в качестве примера вариантах реализации по меньшей мере некоторые из приемников 54 представляют собой одноосные магнитометры, и в некоторых приведенных в качестве примера вариантах реализации по меньшей мере некоторые из приемников 54 представляют собой трехосные или многоосные приемники. Количество приемников Nrec может определять количество осей, вдоль которых расположены приемники. Например, если четыре (4) трехосных приемника 54 предусмотрены на приборе 26 для дальнометрии в различных ориентациях, количество приемников Nrec может быть определено как двенадцать (12). Используя формулу для магнитных полей, представленную в уравнении (1) выше, для каждого из Nrec приемников 54, магнитное поле может быть описано одним из Nrec уравнений, представленных уравнениями (2) - (3) ниже.


В уравнениях (2) - (3) Huk в целом обозначает магнитное поле, измеренное kым приемником 54 прибора 26 для дальнометрии, где k - порядковый номер в диапазоне от 1 до Nrec. Переменная  представляет единичный вектор в направлении, в котором kй приемник 54 ориентирован для приема магнитного поля, например, направлении вектора магнитного момента для магнитного диполя. Переменная
представляет единичный вектор в направлении, в котором kй приемник 54 ориентирован для приема магнитного поля, например, направлении вектора магнитного момента для магнитного диполя. Переменная  представляет собой вектор положения kго приемника 54 по отношению к точке отсчета “P”. Эти уравнения показывают, что магнитное поле Huk, обнаруженное одним из приемников 54, будет представлять собой сумму вкладов, сделанных каждым из токов Npipe, индуцированных в стволах скважин.
представляет собой вектор положения kго приемника 54 по отношению к точке отсчета “P”. Эти уравнения показывают, что магнитное поле Huk, обнаруженное одним из приемников 54, будет представлять собой сумму вкладов, сделанных каждым из токов Npipe, индуцированных в стволах скважин.
В дополнение к Nrec уравнениям (2) - (3) другая система уравнений может быть определена для параметров ствола скважины. При этом используется предположение, что направление тока, индуцированного в стволе скважины, будет ортогональным по отношению к вектору положения. Как видно из Npipe уравнений в уравнениях (4) - (5) ниже, скалярное произведение двух ортогональных векторов и будет равно нулю.

Общее количество уравнений, образованных уравнениями 2 - 5, равно (Npipe + Nrec), сумме количества стволов скважин (Npipe) и количества приемников (Nrec). Поскольку существует шесть «неизвестных» параметров, связанных с каждым из Npipe стволов скважин, как описано выше, общее количество неизвестных параметров, и, таким образом, минимальное количество уравнений, необходимое для получения однозначного решения для неизвестных параметров, составляет  . Таким образом, для получения однозначного решения для неизвестных параметров ствола скважины, в общем случае должно быть удовлетворено отношение, показанное в отношении (6), приведенном ниже. Из этого следует, что в общем случае количество стволов скважин Npipe может быть функцией количества предусмотренных приемников Nrec и максимального количества стволов скважин, которое может быть однозначно определено, как показано в уравнении (7).
. Таким образом, для получения однозначного решения для неизвестных параметров ствола скважины, в общем случае должно быть удовлетворено отношение, показанное в отношении (6), приведенном ниже. Из этого следует, что в общем случае количество стволов скважин Npipe может быть функцией количества предусмотренных приемников Nrec и максимального количества стволов скважин, которое может быть однозначно определено, как показано в уравнении (7).

В некоторых случаях, если имеется или может быть определена некоторая информация, меньшее количество приемников Nrec может обеспечивать определение местоположения большего количества стволов скважины Npipe .Например, если известно, или может быть определено, что каждый из стволов скважин в системе с несколькими стволами скважин является параллельным, общие уравненияа (6) - (7) могут быть сведены до уравнений (8) - (9), приведенных ниже.


Это сведение возможно, если известно, что направление каждого из токов будет одинаковым для каждого ствола скважины, несмотря на то, что амплитуда для каждого тока может отличаться.В некоторых вариантах реализации эта информация может быть известной, например, в системе с несколькими стволами скважин, содержащей одну или более параллельных ГДЗП-пар.
Некоторое количество стволов скважин Npipe может включать ряд стволов скважин, которые генерируют значительное магнитное поле на приборе 26 для дальнометрии. В области с большим скоплением скважин, такой как область, проиллюстрированная на Фиг. 1B, вклады от большого количества стволов скважин могут быть обнаружены прибором 26 для дальнометрии. Однако, некоторые из этих вкладов могут быть незначительными. Например, затухание магнитных полей, создаваемых токами, индуцированными в стволах скважин, на больших расстояниях от прибора 26 для дальнометрии может вносить относительно небольшие вклады в обнаруживаемые магнитные поля. Кроме того, ослабляющая интерференция может приводить к эффекту взаимной компенсации магнитных полей, которые могут вносить вклады в относительно небольшие вклады в обнаруживаемые магнитные поля. Определение незначительности может зависеть от нескольких системных характеристик или требований, таких как точность, минимальный уровень шума и др. Специалистом в данной области техники может быть предварительно задан порог Thfield, ниже которого конкретный вклад может считаться незначительным, и может быть удален из последующего рассмотрения как часть системы с несколькими стволами скважин.
Обратимся к Фиг. 5A, а также продолжим обращаться к Фиг. 2, технологическая процедура 100 может быть использована для определения местоположения множества стволов скважин, используя блок 64 обработки данных системы 50 (Фиг. 2). Предварительные условия для процедуры 100 могут включать наводку тока в каждом стволе скважины, местоположение которого должно быть определено. Прибор 26 для дальнометрии размещается в первом рабочем местоположении, и идентифицированное магнитное поле rec из первого рабочего местоположения обнаруживают с помощью приемников 54 и передают в блок 64 обработки данных, который принимает принятое магнитное поле rec в виде входных данных. Технологическая процедура 100 начинается на этапе 102, когда принятое магнитное поле rec принимает блок обработки данных и оценивает его, чтобы определить степень значимости, если амплитуда или норма принятого магнитного поля rec больше, чем предварительно заданный порог Thfield поля. Если норма принятого магнитного поля rec не превышает предварительно заданный порог Thfield поля, то может быть определено то, что близлежащие стволы скважин, создающие значительное магнитное поле, отсутствуют. Процедура 100 переходит на этап 104, на котором процедура 100 может заканчиваться. Необязательно, в конце процедуры 100 блок 64 обработки данных может передавать информацию о статусе в визуализирующий блок 60, так что пользователь может быть предупрежден о том, что в первом рабочем положении не было определено местоположение близлежащих стволов скважин. Прибор 26 для дальнометрии затем может быть перемещен во второе рабочее положение, и процедура 100 может быть повторена. Предварительные условия и последующая обработка возвращаются на этап 102, на котором может быть оценено другое принятое магнитное поле rec.
Там, где на этапе 102 было определено, что норма принятого магнитного поля rec больше, чем предварительно заданный порог Thfield поля, могут присутствовать близлежащие стволы скважин, вносящие вклад в принятое магнитное поле rec. Процедура 100 переходит на этап 106, на котором может быть инициирован итерационный процесс инверсии для определения количества и местоположения стволов скважин, вносящих свой вклад в величину поля. Сначала, на этапе 106, может быть выбрано предполагаемое количество стволов скважин, которые вносят свой вклад в величину поля. В общем случае, предполагаемое значение может быть выбрано равным единице (1), хотя в некоторых приведенных в качестве примера вариантах реализации предполагаемое количество стволов скважины может быть больше, например, если известно, что поблизости присутствует минимальное количество стволов скважины. Переменной Npipe присваивают начальное предполагаемое значение на этапе 106.
Затем процедура 100 переходит на этап 108, на котором по меньшей мере один набор параметров вычисляют для предполагаемого количества стволов скважин Npipe, которые будут генерировать принятое магнитное поле rec. Например, если предполагаемое количество стволов скважин Npipe задается равным единице (1), вычисляют набор параметров для одного ствола скважины, который будет создавать принятое магнитное поле rec в рабочем местоположении приемников. По меньшей мере один набор параметров может содержать по меньшей мере шесть неизвестных параметров, связанных с векторными параметрами и , и может быть вычислен путем решения системы уравнений, образованной уравнениями (2) - (5), описанными выше. Зачастую эта система уравнений не будет иметь единственного решения, и решение системы уравнений дает множество наборов параметров. Магнитное поле for прямой модели определяют для каждого набора параметров. Магнитные поля for прямой модели могут быть определены путем решения уравнения (2), приведенного выше. Далее для каждого определенного for прямой модели выбирают набор параметров, обеспечивающий минимальное значение нормы разности между принятым магнитным полем rec и магнитным полем for прямой модели. Например, выбирают набор параметров, который удовлетворяет  для предполагаемого количества стволов скважин Npipe.
для предполагаемого количества стволов скважин Npipe.
Далее процедура 100 переходит на этап 110, на котором норма разности между принятым магнитным полем rec и магнитным for прямой модели для выбранного набора параметров, то есть, , сравнивают с предварительно заданным порогом несоответствия Thmsifit. Предварительно заданный порог несоответствия Thmsifit может быть основан на конкретных свойствах прибора 26 для дальнометрии, требованиях точности, условиях шума и др. и может быть определен специалистом в данной области техники для указания того, когда будет найдено приемлемое решение. Если для предполагаемого количества стволов скважин Npipe не меньше, чем предварительно заданный порог несоответствия Thmsifit, процедура 100 переходит на этап 112, на котором предполагаемое количество стволов скважины Npipe увеличивают с определенным шагом. Например, предполагаемое количество стволов скважин Npipe увеличивают на единицу (1).
Затем, на этапе 114, увеличенное предполагаемое количество стволов скважин Npipe сравнивают с максимальным количеством стволов скважин Nmax, расположение которых может определить система 50. Максимальное количество стволов скважин Nmax может представлять собой функцию количества приемников Nrec, предоставленных на приборе 26 для дальнометрии, как указано выше со ссылкой на уравнения (7) - (9). Если увеличенное предполагаемое количество стволов скважин Npipe оказывается большим, чем максимальное количество стволов скважин Nmax, может быть сделано заключение о том, что применение процедуры 100 не дало достоверных решений, и процедура 100 переходит на этап 116, на котором процедура 100 заканчивает свою работу.
Если увеличенное предполагаемое количество стволов скважин Npipe не превышает максимальное количество стволов скважин Nmax, процедура 100 возвращается на этап 108, на котором выбирается набор параметров, удовлетворяющий условию для увеличенного предполагаемого количества стволов скважин Npipe. Этапы 108 - 114 могут повторяться до тех пор, пока на этапе 110 не будет определено, что разность между принятым магнитным полем rec и магнитным полем for прямой модели, определенным для выбранного набора параметров, является меньшим, чем предварительно заданный порог несоответствия Tmisfit. Затем, может быть сделано умозаключение о том, что выбранный набор параметров представляет достоверное решение, и процедура 100 переходит на необязательный этап 118. На этапе 118 отдельные вклады каждого из Npipe стволов скважин, представленных в выбранном наборе параметров, вычисляют и сравнивают с предварительно заданным порогом Thfield поля. Если любой из отдельных вкладов определяют как незначительный (меньше, чем предварительно заданный порог Thfield поля), стволы скважин, вносящие незначительные вклады, могут быть отброшены или не приняты во внимание. В некоторых приведенных в качестве примера вариантах реализации отдельные вклады могут быть извлечены из расчетов, выполненных на этапе 108, для вычисления магнитного поля for прямой модели. В некоторых случаях этап 118 может приводить к тому, что каждый из Npipe стволов скважин не принимается во внимание. Например, каждый отдельный ствол скважины может осуществлять вклад, который меньше, чем предварительно заданный порог Thfield поля, тогда как в сочетании — больше, чем предварительно заданный порог Thfield поля.
Затем процедура 100 может перейти на этап 120, на котором могут быть возвращены значительные решения. Возвращенные решения могут включать, например, векторный параметр и/или векторный параметр для каждого ствола скважины, осуществляющего значительный вклад. В некоторых вариантах реализации параметры, такие как амплитуда тока, азимутальный угол и ориентация стволов скважин, могут быть измерены или определены на основе выбранного набора параметров посредством блока 64 обработки данных, и эти параметры могут быть возвращены как решения. В некоторых приведенных в качестве примера вариантах реализации решения могут быть возвращены в визуализирующий блок 60 для оценки пользователем, или любому другому компоненту системы 50.
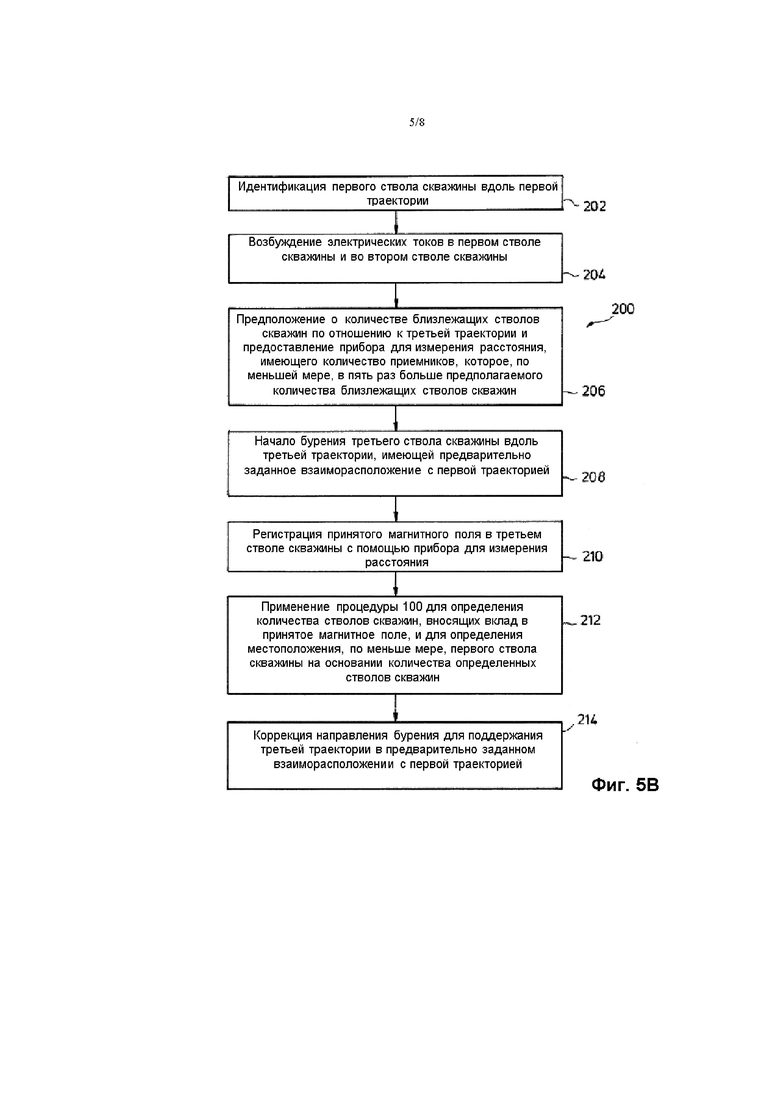
Теперь обратимся к Фиг. 5B, и продолжим обращаться к Фиг. 2 и 4, где описан приведенный в качестве примера вариант реализации технологической процедуры 200 для формирования ствола скважины в геологическом пласте «G». Процедура 200 начинается на этапе 202, на котором первый ствол 12 скважины идентифицируют проходящим вдоль первой траектории. Первый ствол 12 скважины может представлять собой существующий ствол скважины, идентифицированный в области с большим скоплением скважин, или первый ствол 12 скважины может быть выполнен бурением с помощью любого способа бурения, известного из уровня техники. Первый электрический ток  затем может быть индуцирован в первом стволе скважины, а второй ток
затем может быть индуцирован в первом стволе скважины, а второй ток  может быть индуцирован во втором стволе 14 скважины (этап 204). В некоторых вариантах реализации первый и второй электрические токи и могут быть возбуждены дистанционно, например, с помощью передатчиков 52 прибора 26 для дальнометрии. Таким образом, второй ток может быть возбужден во втором стволе 14 скважины без точного установления местоположения или проверки существования второго ствола 14 скважины. В других вариантах реализации первый и второй токи и могут быть непосредственно возбуждены источником 32 тока (Фиг. 1) в местоположении «S» на поверхности. В одном или более вариантах реализации первый и второй токи и могут быть возбуждены в разных точках в рамках процедуры 200, и первый и второй токи и могут поддерживаться бесперебойно или непрерывно в течение всей процедуры 200.
может быть индуцирован во втором стволе 14 скважины (этап 204). В некоторых вариантах реализации первый и второй электрические токи и могут быть возбуждены дистанционно, например, с помощью передатчиков 52 прибора 26 для дальнометрии. Таким образом, второй ток может быть возбужден во втором стволе 14 скважины без точного установления местоположения или проверки существования второго ствола 14 скважины. В других вариантах реализации первый и второй токи и могут быть непосредственно возбуждены источником 32 тока (Фиг. 1) в местоположении «S» на поверхности. В одном или более вариантах реализации первый и второй токи и могут быть возбуждены в разных точках в рамках процедуры 200, и первый и второй токи и могут поддерживаться бесперебойно или непрерывно в течение всей процедуры 200.
На этапе 206, третья траектория может быть определена как имеющая предварительно заданное взаиморасположение относительно первой траектории. В одном или более приведенных в качестве примера вариантах реализации третья траектория может быть в целом параллельна первой траектории, например, если первый и третий стволы скважин содержат ГДЗП-пару. В других вариантах реализации предварительно заданное взаиморасположение может представлять собой пересекающееся взаиморасположение, где третий ствол скважины пересекает первый ствол скважины на предварительно заданной и/или фактической глубине, взаиморасположение в форме бокового ответвления, когда третий ствол скважины ответвляется от первого ствола скважины в предварительно заданном местоположении. Количество стволов скважин Npipe возле по меньшей мере части третьей траектории может быть предположено для определения достаточного количества приемников Nrec для определения местоположения предполагаемого количества близлежащих стволов скважин Npipe. Достаточное количество приемников может быть определено, например, из уравнений (7) и (9), приведенных выше, и в некоторых вариантах реализации образует величину, которая в пять (5) раз больше предполагаемого количества близлежащих стволов скважин Npipe. Прибор 26 для дальнометрии, содержащий достаточное количество приемников 54, может быть установлен в бурильной колонне 18 (Фиг. 1A).
Далее на этапе 208 бурильная колонна 18 может быть применена для начала бурения третьего ствола 16 скважины вдоль третьей траектории. Если прибор 26 для дальнометрии расположен в первом рабочем положение внутри третьего ствола 16 скважины, принятое магнитное поле rec может быть обнаружено с помощью приемников 54, и принятое магнитное поле rec может быть передано в блок 64 обработки данных (этап 210).
Далее на этапе 212 блок 64 обработки данных может выполнять процедуру 100 (Фиг. 5A) для определения количества стволов скважин Npipe, вносящих свой вклад в принятое магнитное поле rec, в первом рабочем положении. Блок 64 обработки данных может тем самым определять местоположение по меньшей мере первого ствола 12 скважины по отношению к третьему стволу 16 скважины. Возвращаются сведения о местоположении первого ствола 12 скважины, которые могут быть использованы для коррекции направления бурения для поддержания траектории третьего ствола 16 скважины в предварительно заданном взаиморасположении с первой траекторией первого ствола 12 скважины (этап 214).
Затем процедура 200 возвращается на этап 210, на котором прибор 26 для дальнометрии может снова принимать принятое магнитное поле rec из второго рабочего положения вдоль третьей траектории. Процедура 200 может повторять этапы 210 - 214 до тех пор, пока третий ствол 16 скважины не будет готов, и жесткие допуски могут выдерживаться даже когда количество стволов скважин Npipe, вносящих значительный вклад в принятое магнитное поле, меняется вдоль третьей траектории.
2.Пример реализации
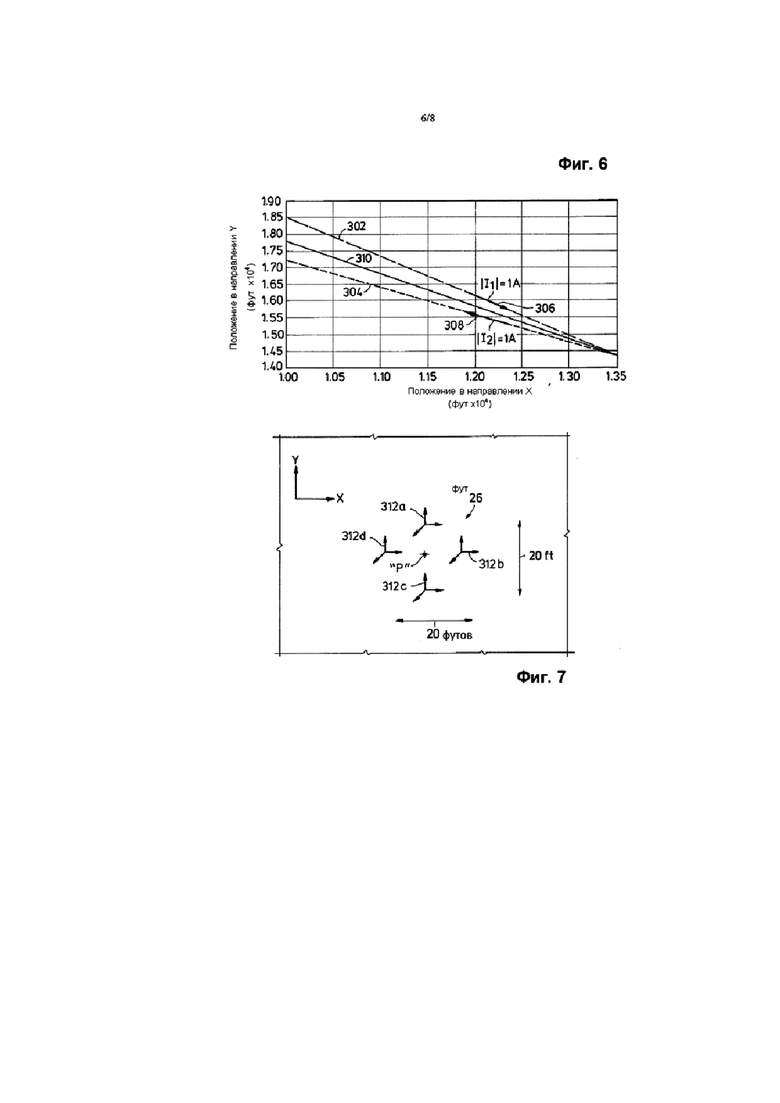
Теперь обратимся к Фиг. 6 - 9B, на которых проиллюстрирован один пример математически смоделированной системы 300 из двух стволов скважин. Первый ствол скважины 302 (труба 1) и второй ствол скважины 304 (труба 2) смоделированы в одной плоскости, обозначенной осями x и y. Токи I1 и I2 смоделированы в целом в противоположных направлениях вдоль первой и второй траекторий, определенных первым и вторым стволами 302, 304 скважин, как показано стрелками 306 и 308. Каждый смоделированный ток I1 и I2 имеет амплитуду 1 ампер. Третья траектория 310 также изображена между первым и вторым стволами 302, 304 скважин, при этом вдоль нее перемещается прибор 26 для дальнометрии (Фиг. 7).
Как проиллюстрировано на Фиг. 7, прибор 26 для дальнометрии смоделирован так, что он содержит 4 трехосных приемника 312a, 312b, 312c и 312d, расположенных симметрично вокруг точки отсчета «P». Трехосные приемники 312a, 312c разделены вдоль оси y расстоянием в 6,1 метра (20 футов), и трехосные приемники 312b, 312d отделены вдоль оси x расстоянием в 6,1 метра (20 футов). Точка отсчета «P» в центре трехосных приемников 312a, 312b, 312c и 312d была смоделирована для перемещения вдоль третьей траектории 310, изображенной на Фиг. 6.
Во множестве рабочих местоположений вдоль третьей траектории 310, магнитное поле for прямой модели было вычислено как индуцированное первым и вторым токами I1 и I2 для каждого из приемников 312a, 312b, 312c и 312d. Для моделирования принятого магнитного поля rec, однопроцентная (1%) мультипликативная ошибка с равномерным распределением была добавлена к вычисленному магнитному полю for прямой модели для каждого из приемников 312a, 312b, 312c и 312d в каждом рабочем местоположении вдоль третьей траектории 310. После того как было смоделировано принятое магнитное поле rec , система уравнений, представленная уравнениями (2) - (5), была решена, как описано выше со ссылкой на этап 108 процедуры 100 (Фиг. 5A).Так как количество смоделированных стволов скважины было известно, переменная Npipe была определена равной двум (2), и итеративный процесс этапов 110, 112, и 114 более не являлся необходимым для определения количества близлежащих стволов скважин.
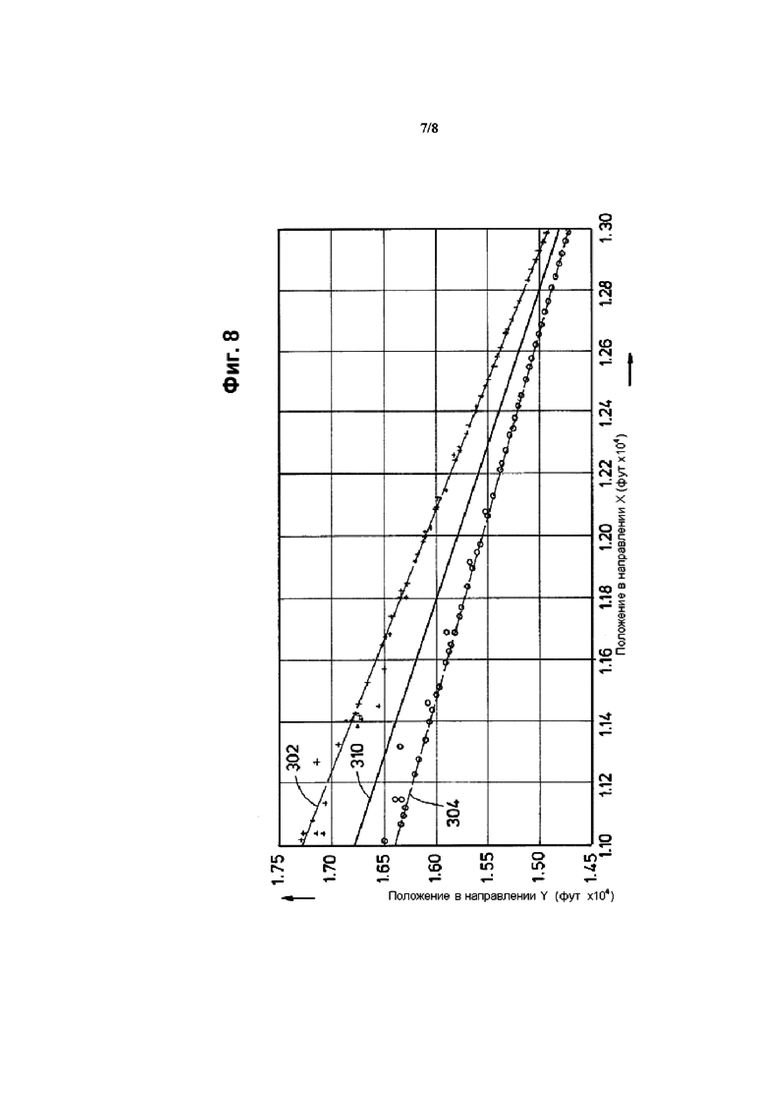
Набор параметров, удовлетворяющих выражению  для Npipe двух (2) стволов скважин, был определен, и местоположения первого и второго стволов 302, 304 скважин были извлечены из него для каждого из рабочих местоположений. Извлеченные местоположения нанесены на график на Фиг. 8 вдоль смоделированной первой и второй траекторий для первого и второго стволов 302, 304 скважин. Извлеченные местоположения для первого ствола 302 скважины изображены в виде звездочек, а извлеченные местоположения для второго ствола 304 скважины изображены в виде ромбов. Как показано на Фиг. 8, извлеченные местоположения являются более точными там, где третья траектория 310 прибора 26 для дальнометрии проходит относительно близко к первому и второму стволам 302, 304 скважин (в направлении правой стороны графика). В этом примере точность является особенно высокой там, где прибор 26 для дальнометрии находится ближе, чем радиальное расстояние “R”, равное около 61 метру (около 200 футов). Этот диапазон является относительно важным для целей обхождения скважин и пересечения с ними.
для Npipe двух (2) стволов скважин, был определен, и местоположения первого и второго стволов 302, 304 скважин были извлечены из него для каждого из рабочих местоположений. Извлеченные местоположения нанесены на график на Фиг. 8 вдоль смоделированной первой и второй траекторий для первого и второго стволов 302, 304 скважин. Извлеченные местоположения для первого ствола 302 скважины изображены в виде звездочек, а извлеченные местоположения для второго ствола 304 скважины изображены в виде ромбов. Как показано на Фиг. 8, извлеченные местоположения являются более точными там, где третья траектория 310 прибора 26 для дальнометрии проходит относительно близко к первому и второму стволам 302, 304 скважин (в направлении правой стороны графика). В этом примере точность является особенно высокой там, где прибор 26 для дальнометрии находится ближе, чем радиальное расстояние “R”, равное около 61 метру (около 200 футов). Этот диапазон является относительно важным для целей обхождения скважин и пересечения с ними.
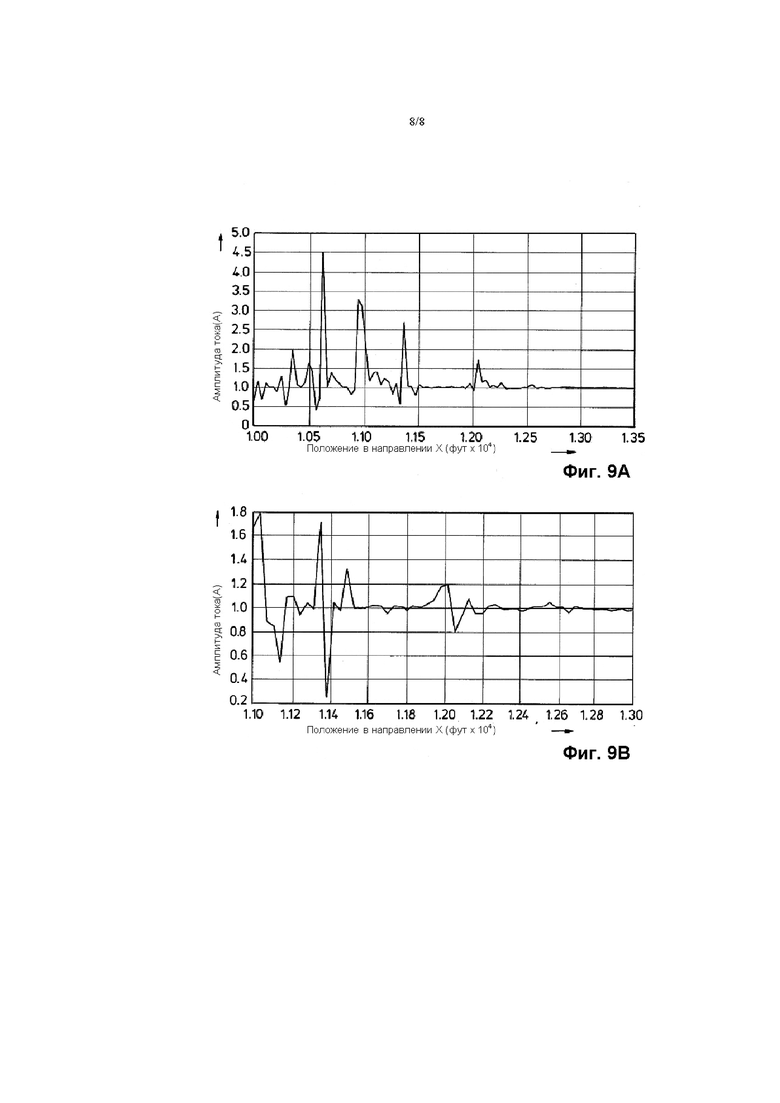
Как проиллюстрировано на Фиг. 9A и 9B, токи также извлекают из набора параметров, удовлетворяющего равенству . Снова на Фиг. 9A и 9B, ось x представляет положение соответствующих стволов скважин вдоль направления оси x. Ось y представляет амплитуду извлеченных токов. Изображенные амплитуды токов максимально приближаются к амплитуде в 1 ампер первого и второго токов I1 и I2 (Фиг. 6) там, где прибор 26 для дальнометрии смоделирован расположенным максимально близко к смоделированным стволам скважин (в направлении правой стороны графиков). Опять же точность изображена относительно высокой в диапазоне, в котором точность относительно важна для целей обхождения скважин и пересечения с ними.
3.Аспекты изобретения
В одном аспекте изобретения способ определения местоположения нескольких стволов скважин включает (a) возбуждение первого электрического тока в первом стволе скважины, (b) возбуждение второго электрического тока во втором стволе скважины, (c) расположение прибора для дальнометрии в удаленном местоположении по отношению к первому и второму стволам скважин, (d) прием и регистрацию магнитного поля в удаленном местоположении с помощью приемников, предусмотренных на приборе для дальнометрии, и (e) измерение по меньшей мере одного параметра ствола скважины каждого из первого ствола скважины и второго ствола скважины на основании магнитного поля, принятого прибором для дальнометрии.
В некоторых приведенных в качестве примера вариантах реализации по меньшей мере один параметр ствола скважины включает по меньшей мере одно из группы, состоящей из первого электрического тока, второго электрического тока, расстояния до каждого из первого и второго стволов скважин от приемников, азимутального угла каждого из первого и второго стволов скважин и ориентации первого и второго стволов скважины. По меньшей мере один параметр ствола скважины может включать амплитуду по меньшей мере одного из первого тока и второго тока.
В одном или более приведенных в качестве примера вариантах реализации способ дополнительно включает этап, на котором осуществляют определение того, что принятое магнитное поле превышает предварительно заданный порог поля. Способ может также включать этап, на котором осуществляют вычисление вклада каждого из первого и второго стволов скважин в принятое магнитное поле и осуществляют определение того, что вклад по меньшей мере одного из первого и второго стволов скважин превышает предварительно заданный порог поля.
В некоторых приведенных в качестве примера вариантах реализации способ дополнительно включает этап, на котором осуществляют определение на основании принятого магнитного поля количества стволов скважин, вносящих вклад в принятое магнитное поле. Способ может также включать этап, на котором осуществляют определение на основании принятого магнитного поля того, что количество стволов скважин, вносящих вклад в магнитное поле, принятое прибором для дальнометрии, больше двух, и осуществляют измерение на основании принятого магнитного поля по меньшей мере одного параметра ствола скважины по меньшей мере одного ствола скважины, отличного от первого ствола скважины и второго ствола скважины. Способ может включать этап, на котором осуществляют определение того, что вклад по меньшей мере одного ствола скважины, отличного от первого ствола скважины и второго ствола скважины, в принятое магнитное поле больше, чем предварительно заданное пороговое значение.
В некоторых приведенных в качестве примера вариантах реализации этап, на котором осуществляют определение количества стволов скважин, вносящих вклад в магнитное поле, может включать (a) этап, на котором осуществляют предположение о количестве стволов скважин для определения предполагаемого количества стволов скважин, (b) этап, на котором осуществляют вычисление по меньшей мере одного набора параметров для предполагаемого количества стволов скважин, которые будут создавать принимаемое магнитное поле, (c) этап, на котором осуществляют определение магнитного поля прямой модели для каждого набора параметров, вычисленного для предполагаемого количества стволов скважин, (d) этап, на котором осуществляют выбор набора параметров из, по меньшей мере, одного набора параметров, для которого разность между принятым магнитным полем и магнитным полем прямой модели является наименьшей, и (e) этап, на котором осуществляют определение того, что разность между принятым магнитным полем и магнитным полем прямой модели для выбранного набора параметров меньше, чем предварительно заданный порог несоответствия.
В одном или более вариантах реализации способ может дополнительно включать этап, на котором осуществляют определение того, что разность между принятым магнитным полем и магнитным полем прямой модели не меньше, чем предварительно заданный порог несоответствия, и с определенным шагом осуществляют увеличение предполагаемого количества стволов скважин. Способ может также включать этап, на котором осуществляют определение того, что с определенным шагом увеличенное предполагаемое количество стволов скважин не превышает максимальное количество стволов скважин, при этом максимальное количество стволов скважин зависит от количества приемников, предусмотренных на приборе для дальнометрии. В некоторых приведенных в качестве примера вариантах реализации способ дополнительно включает этап, на котором осуществляют определение того, что амплитуда принятого магнитного поля больше, чем предварительно заданный порог поля, при этом порог поля выбирают на основании точности приемников при регистрации напряженности магнитного поля. Способ может включать этап, на котором осуществляют выбор предварительно заданного порога несоответствия на основании свойств прибора для дальнометрии и требований точности для измерения, по меньшей мере, одного параметра ствола скважины каждого из первого ствола скважины и второго ствола скважины.
В некоторых приведенных в качестве примера вариантах реализации этап, на котором прибор для дальнометрии располагают в удаленном местоположении, включает этап, на котором осуществляют размещение прибора для дальнометрии на бурильной колонне внутри третьего ствола скважины, при этом этап, на котором осуществляют измерение, по меньшей мере, одного параметра ствола скважины, включает этап, на котором измеряют расстояние до по меньшей мере одного из первого и второго стволов скважин от приемников, и при этом способ дополнительно включает этап, на котором осуществляют направленное бурение третьего ствола скважины в предварительно заданном взаиморасположении по отношению к по меньшей мере одному из первого и второго стволов скважин. Предварительно заданное взаиморасположение может включать, по меньшей мере, одно из параллельного взаиморасположения, взаиморасположения без пересечения, взаиморасположения с пересечением и взаиморасположения с боковым ответвлением.
В некоторых приведенных в качестве примера вариантах реализации первый и второй токи возбуждают на одной частоте, и принимаемое магнитное поле принимают с помощью группы одноосных магнитометров, расположенных в третьем стволе скважины. В некоторых вариантах реализации группа одноосных магнитометров может содержать восемь (8) магнитометров, и восемь (8) магнитометров могут быть в шахматном порядке расположены вдоль оси прибора для дальнометрии. В других приведенных в качестве примера вариантах реализации группа одноосных магнитометров предусмотрена для приема принимаемого магнитного поля, при этом количество одноосных магнитометров в этой группе, по меньшей мере, на два (2) меньше, чем утроенное предполагаемое количество близлежащих стволов скважин (то есть, Nrec  Npipe - 2) в удаленном местоположении с приемниками, установленными на приборе для дальнометрии.
Npipe - 2) в удаленном местоположении с приемниками, установленными на приборе для дальнометрии.
В некоторых приведенных в качестве примера вариантах реализации первый и второй стволы скважин представляют собой нагнетательную и эксплуатационную скважины соответственно ГДЗП-пары. В некоторых вариантах реализации первый ствол скважины представляет собой эксплуатационную скважину первой ГДЗП-пары, а второй ствол скважины представляет собой эксплуатационную скважину второй ГДЗП-пары. В некоторых вариантах реализации первый ствол скважины представляет собой нагнетательную скважину первой ГДЗП-пары, а второй ствол скважины представляет собой эксплуатационную скважину второй ГДЗП-пары. В некоторых вариантах реализации первый ствол скважины представляет собой нагнетательную скважину первой ГДЗП-пары, а второй ствол скважины представляет собой нагнетательную скважину второй ГДЗП-пары. В некоторых вариантах реализации первый ствол скважины представляет собой эксплуатационную скважину ГДЗП-пары, а второй ствол скважины представляет собой боковой ствол скважины, ответвляющийся от первого ствола скважины.
Согласно другому аспекту настоящего изобретения способ формирования ствола скважины в геологическом пласте включает (a) этап, на котором осуществляют идентификацию первого ствола скважины в геологическом пласте вдоль первой траектории, (b) этап, на котором осуществляют возбуждение первого электрического тока вдоль первой траектории в первом стволе скважины и второго электрического тока вдоль второй траектории во втором стволе скважины, (c) этап, на котором осуществляют бурение третьего ствола скважины вдоль третьей траектории, имеющей предварительно заданное взаиморасположение относительно первой траектории, (d) этап, на котором осуществляют регистрацию принятого магнитного поля в третьем стволе скважины, (e) этап, на котором осуществляют определение на основании принятого магнитного поля количества стволов скважин, вносящих вклад в принятое магнитное поле, (f) этап, на котором осуществляют определение местоположения первого ствола скважины на основании количества стволов скважин, определенных как вносящие вклад в принятое магнитное поле, и (g) этап, на котором осуществляют коррекцию направления бурения второго ствола скважины для поддержания третьей траектории в предварительно заданном взаиморасположении относительно первой траектории.
В одном или более приведенных в качестве примера вариантах реализации этап, на котором осуществляют определение количества стволов скважин, вносящих вклад в магнитное поле, включает (a) этап, на котором осуществляют предположение о количестве стволов скважин для определения предполагаемого количества стволов скважин, (b) этап, на котором осуществляют вычисление по меньшей мере одного набора параметров для предполагаемого количества стволов скважин, которые будут создавать принятое магнитное поле, (c) этап, на котором осуществляют определение магнитного поля прямой модели для каждого набора параметров, вычисленного для предполагаемого количества стволов скважин, (d) этап, на котором осуществляют выбор набора параметров из по меньшей мере одного набора параметров, для которого разность между принятым магнитным полем и магнитным полем прямой модели является наименьшей, и (e) этап, на котором осуществляют определение того, что разность между принятым магнитным полем и магнитным полем прямой модели для выбранного набора параметров меньше, чем предварительно заданный порог несоответствия. В некоторых вариантах реализации определенное местоположение первого ствола скважины представляет собой параметр в выбранном наборе параметров.
В некоторых приведенных в качестве примера вариантах реализации способ дополнительно включает этап, на котором осуществляют предположение количества стволов скважин, которое надо определить на основании принятого магнитного поля, и осуществляют размещение прибора для дальнометрии, имеющего Nrec одноосных приемников, где Nrec по меньшей мере в пять раз больше, чем предполагаемое количество стволов скважин.В некоторых приведенных в качестве примера вариантах реализации предварительно заданное взаиморасположение является в общем параллельным взаиморасположением, при этом один из первого и третьего стволов скважин является менее глубоким, чем другой из первого и третьего стволов скважин, так что первый и второй стволы скважин вместе образуют ГДЗП-пару.
В другом аспекте изобретения система для определения местоположения нескольких стволов скважин содержит (a) постоянное запоминающее устройство, содержащее в себе набор команд, при этом эти команды включают команды приема принимаемого магнитного поля в качестве входных данных, команды для определения на основании принятого магнитного поля количества стволов скважин, вносящих вклад в принятое магнитное поле, и команды для определения по меньшей мере одного параметра каждого ствола скважины, определенного как того, который вносит вклад в принятое магнитное поле; и процессор для выполнения указанного набора команд.
В некоторых приведенных в качестве примера вариантах реализации этап, на котором осуществляют определение количества стволов скважин, вносящих вклад в магнитное поле, может включать (a) этап, на котором осуществляют предположение о количестве стволов скважин для определения предполагаемого количества стволов скважин, (b) этап, на котором осуществляют вычисление, по меньшей мере, одного набора параметров для предполагаемого количества стволов скважин, которые будут создавать принятое магнитное поле, (c) этап, на котором осуществляют определение магнитного поля прямой модели для каждого набора параметров, вычисленного для предполагаемого количества стволов скважин, (e) этап, на котором осуществляют выбор набора параметров из по меньшей мере одного набора параметров, для которого разность между принятым магнитным полем и магнитным полем прямой модели является наименьшей, и (f) этап, на котором осуществляют определение того, меньше ли разность между принятым магнитным полем и магнитным полем прямой модели для выбранного набора параметров, чем предварительно заданный порог несоответствия.
В одном или более приведенных в качестве примера вариантах реализации система дополнительно содержит бурильную колонну и прибор для дальнометрии, который несет бурильная колонна. В некоторых вариантах реализации прибор для дальнометрии может содержать приемник, выполненный с возможностью регистрации и измерения принятого магнитного поля, и при этом прибор для дальнометрии может быть связан с процессором с возможностью обмена информацией. В некоторых приведенных в качестве примера вариантах реализации прибор для дальнометрии может дополнительно содержать передатчик, выполненный с возможностью генерирования электромагнитного зондирующего сигнала, который обеспечивает протекание тока в электропроводных объектах, внешних по отношению к передатчикам, чтобы в результате генерировать принимаемое магнитное поле. Также в некоторых приведенных в качестве примера вариантах реализации система может дополнительно содержать передатчик, размещенный независимо от прибора для дальнометрии в первый ствол скважины ГДЗП-пары стволов скважины, и бурильная колонна может быть размещена во второй ствол скважины ГДЗП-пары.
Кроме того, любые из способов, описанных в данном документе, могут быть осуществлены в системе, содержащей схему обработки, для реализации любого из способов, или в программном продукте для вычислительной машины, содержащем инструкции, которые, при их исполнении по меньшей мере одним процессором, обуславливают выполнение процессором любого из способов, описанных в данном документе.
Реферат настоящего изобретения разработан исключительно для передачи его в Бюро регистрации патентов и торговых марок США и представления более широкой аудитории способа быстрого определения характера и сущности технического описания после беглого прочтения и отражает лишь один или большее количество вариантов реализации.
Хотя подробно проиллюстрированы различные варианты реализации, изобретение не ограничивается представленными вариантами реализации.Для специалистов в данной области техники будут очевидны возможные усовершенствования и доработки представленных выше вариантов реализации. Эти усовершенствования и доработки не отступают от сущности и входят в объем настоящего изобретения.
Изобретение относится к средствам для определения местоположения электропроводных объектов, таких как обсадная колонна ствола скважины или трубопроводы, расположенные под земной поверхностью. Техническим результатом является повышение точности определения местоположения ствола скважины. В частности, предложен способ определения местоположения нескольких стволов скважин, включающий: этап, на котором осуществляют возбуждение первого электрического тока в первом стволе скважины; этап, на котором осуществляют возбуждение второго электрического тока во втором стволе скважины; этап, на котором осуществляют расположение прибора для дальнометрии в удаленном местоположении по отношению к первому и второму стволам скважин; этап, на котором осуществляют прием и регистрацию магнитного поля в удаленном местоположении с помощью приемников, предусмотренных на приборе для дальнометрии; и этап, на котором осуществляют измерение по меньшей мере одного параметра ствола скважины каждого из первого ствола скважины и второго ствола скважины на основании магнитного поля, принятого с помощью прибора для дальнометрии. 3 н. и 20 з.п. ф-лы, 12 ил.
1. Способ определения местоположения нескольких стволов скважин, включающий:
этап, на котором осуществляют возбуждение первого электрического тока в первом стволе скважины;
этап, на котором осуществляют возбуждение второго электрического тока во втором стволе скважины;
этап, на котором осуществляют расположение прибора для дальнометрии в удаленном местоположении по отношению к первому и второму стволам скважин;
этап, на котором осуществляют прием и регистрацию магнитного поля в удаленном местоположении с помощью приемников, предусмотренных на приборе для дальнометрии; и
этап, на котором осуществляют измерение по меньшей мере одного параметра ствола скважины каждого из первого ствола скважины и второго ствола скважины на основании магнитного поля, принятого с помощью прибора для дальнометрии.
2. Способ по п. 1, отличающийся тем, что по меньшей мере один параметр ствола скважины включает по меньшей мере одно из группы, состоящей из первого электрического тока, второго электрического тока, расстояния до каждого из первого и второго стволов скважин от приемников, азимутального угла каждого из первого и второго стволов скважин и ориентации первого и второго стволов скважин.
3. Способ по п. 2, отличающийся тем, что по меньшей мере один параметр ствола скважины включает по меньшей мере одно из первого тока и второго тока.
4. Способ по п. 1, дополнительно включающий этап, на котором осуществляют определение того, что принятое магнитное поле превышает предварительно заданный порог поля.
5. Способ по п. 4, дополнительно включающий:
этап, на котором осуществляют вычисление вклада каждого из первого и второго стволов скважин в принятое магнитное поле; и
этап, на котором осуществляют определение того, что вклад по меньшей мере одного из первого и второго стволов скважин больше, чем предварительно заданный порог поля.
6. Способ по п. 1, дополнительно включающий этап, на котором осуществляют определение на основании принятого магнитного поля количества стволов скважин, вносящих вклад в принятое магнитное поле.
7. Способ по п. 6, отличающийся тем, что этап, на котором осуществляют определение количества стволов скважин, вносящих вклад в магнитное поле, включает:
этап, на котором осуществляют предположение о количестве стволов скважин для определения предполагаемого количества стволов скважин;
этап, на котором осуществляют вычисление по меньшей мере одного набора параметров для предполагаемого количества стволов скважин, которые будут создавать принимаемое магнитное поле;
этап, на котором осуществляют определение магнитного поля прямой модели для каждого набора параметров, вычисленного для предполагаемого количества стволов скважин;
этап, на котором осуществляют выбор набора параметров из по меньшей мере одного набора параметров, для которого разность между принятым магнитным полем и магнитным полем прямой модели является наименьшей; и
этап, на котором осуществляют определение того, что разность между принятым магнитным полем и магнитным полем прямой модели для выбранного набора параметров меньше, чем предварительно заданный порог несоответствия.
8. Способ по п. 7, дополнительно включающий:
этап, на котором осуществляют определение того, что разность между принятым магнитным полем и магнитным полем прямой модели не меньше, чем предварительно заданный порог несоответствия; и
этап, на котором осуществляют увеличение с определенным шагом предполагаемого количества стволов скважин.
9. Способ по п. 8, дополнительно включающий этап, на котором осуществляют определение того, что увеличенное с определенным шагом предполагаемое количество стволов скважин не превышает максимальное количество стволов скважин, при этом максимальное количество стволов скважин зависит от количества приемников, предусмотренных на приборе для дальнометрии.
10. Способ по п. 7, дополнительно включающий этап, на котором осуществляют определение того, что амплитуда принятого магнитного поля больше, чем предварительно заданный порог поля, при этом порог поля выбирают на основании точности приемников при регистрации напряженности магнитного поля.
11. Способ по п. 7, дополнительно включающий этап, на котором осуществляют выбор предварительно заданного порога несоответствия на основании свойств прибора для дальнометрии и требований точности для измерения по меньшей мере одного параметра ствола скважины каждого из первого ствола скважины и второго ствола скважины.
12. Способ по п. 1, в котором этап, на котором прибор для дальнометрии располагают в удаленном местоположении, включает этап, на котором осуществляют размещение прибора для дальнометрии на бурильной колонне внутри третьего ствола скважины, при этом этап, на котором осуществляют измерение по меньшей мере одного параметра ствола скважины, включает этап, на котором осуществляют измерение расстояния по меньшей мере до одного из первого и второго стволов скважин от приемников, при этом способ дополнительно включает этап, на котором осуществляют направленное бурение третьего ствола скважины в предварительно заданном взаиморасположении по отношению к по меньшей мере одному из первого и второго стволов скважин.
13. Способ по п. 12, отличающийся тем, что предварительно заданное взаиморасположение может включать по меньшей мере одно из параллельного взаиморасположения, взаиморасположения без пересечения, взаиморасположения с пересечением и взаиморасположения с боковым ответвлением.
14. Способ формирования ствола скважины в геологическом пласте, включающий:
этап, на котором осуществляют идентификацию первого ствола скважины в геологическом пласте вдоль первой траектории;
этап, на котором осуществляют возбуждение первого электрического тока вдоль первой траектории в первом стволе скважины и второго электрического тока вдоль второй траектории во втором стволе скважины;
этап, на котором осуществляют бурение третьего ствола скважины вдоль третьей траектории, имеющей предварительно заданное взаиморасположение относительно первой траектории;
этап, на котором осуществляют регистрацию принятого магнитного поля в третьем стволе скважины;
этап, на котором осуществляют определение на основании принятого магнитного поля количества стволов скважин, вносящих вклад в принятое магнитное поле;
этап, на котором осуществляют определение местоположения первого ствола скважины на основании количества стволов скважин, определенных как те, которые вносят вклад в принятое магнитное поле; и
этап, на котором осуществляют коррекцию направления бурения второго ствола скважины для поддержания третьей траектории в предварительно заданном взаиморасположении относительно первой траектории.
15. Способ по п. 14, отличающийся тем, что этап, на котором осуществляют определение количества стволов скважин, вносящих вклад в магнитное поле, включает:
этап, на котором осуществляют предположение о количестве стволов скважин для определения предполагаемого количества стволов скважин;
этап, на котором осуществляют вычисление по меньшей мере одного набора параметров для предполагаемого количества стволов скважин, которые будут создавать принимаемое магнитное поле;
этап, на котором осуществляют определение магнитного поля прямой модели для каждого набора параметров, вычисленного для предполагаемого количества стволов скважин;
этап, на котором осуществляют выбор набора параметров из по меньшей мере одного набора параметров, для которого разность между принятым магнитным полем и магнитным полем прямой модели является наименьшей; и
этап, на котором осуществляют определение того, что разность между принятым магнитным полем и магнитным полем прямой модели для выбранного набора параметров меньше, чем предварительно заданный порог несоответствия.
16. Способ по п. 15, отличающийся тем, что определенное местоположение первого ствола скважины является параметром в выбранном наборе параметров.
17. Способ по п. 14, дополнительно включающий:
этап, на котором осуществляют предположение о количестве стволов скважин, которое должно быть определено на основании принятого магнитного поля; и
этап, на котором осуществляют размещение прибора для дальнометрии, имеющего Nrec одноосных приемников, где Nrec по меньшей мере в пять раз больше, чем предполагаемое количество стволов скважин.
18. Способ по п. 14, отличающийся тем, что предварительно заданное взаиморасположение является в общем параллельным взаиморасположением, при этом один из первого и третьего стволов скважин является менее глубоким, чем другой из первого и третьего стволов скважин, так что первый и второй стволы скважин вместе образуют ГДЗП-пару.
19. Система для определения местоположения нескольких стволов скважин, содержащая:
постоянное запоминающее устройство, в котором хранится набор команд, эти команды включают команды для принятия принимаемого магнитного поля в качестве входных данных, команды для определения на основании принятого магнитного поля количества стволов скважин, вносящих вклад в принятое магнитное поле, и команды для определения по меньшей мере одного параметра каждого ствола скважины, определенного как того, который вносит вклад в принятое магнитное поле; и
процессор для выполнения этого набора команд.
20. Система по п. 19, отличающаяся тем, что набор команд для определения количества стволов скважин, вносящих вклад в принятое магнитное поле, содержит инструкции для:
предположения о количестве стволов скважин, вносящих вклад в принятое магнитное поле, для определения предполагаемого количества стволов скважин;
вычисления по меньшей мере одного набора параметров для предполагаемого количества стволов скважин, которые будут создавать принимаемое магнитное поле;
определения магнитного поля прямой модели для каждого набора параметров, вычисленного для предполагаемого количества стволов скважин;
выбора набора параметров из по меньшей мере одного набора параметров, для которого разность между принятым магнитным полем и магнитным полем прямой модели является наименьшей; и
определения того, меньше ли разность между принятым магнитным полем и магнитным полем прямой модели для выбранного набора параметров, чем предварительно заданный порог несоответствия.
21. Система по п. 19, дополнительно содержащая бурильную колонну и прибор для дальнометрии, который несет бурильная колонна, при этом прибор для дальнометрии содержит приемник, выполненный с возможностью регистрации и измерения принятого магнитного поля, и при этом прибор для дальнометрии связан с процессором с возможностью обмена информацией.
22. Система по п. 21, отличающаяся тем, что прибор для дальнометрии дополнительно содержит передатчик, выполненный с возможностью генерирования электромагнитного зондирующего сигнала, который вызывает протекание тока в электропроводных объектах, внешних по отношению к передатчикам, чтобы тем самым генерировать принимаемое магнитное поле.
23. Система по п. 21, дополнительно содержащая передатчик, размещенный независимо от прибора для дальнометрии в первом стволе скважины ГДЗП-пары стволов скважин, при этом бурильная колонна размещена во втором стволе скважины ГДЗП-пары.
| СПОСОБ И СИСТЕМА ДЛЯ ТОЧНОГО НАПРАВЛЕНИЯ БУРЕНИЯ ДВОЙНЫХ СКВАЖИН | 2005 |
|
RU2386810C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ БУРЕНИЯ ВТОРОЙ СКВАЖИНЫ С ЕЕ ПРОХОЖДЕНИЕМ ВБЛИЗИ ПЕРВОЙ СКВАЖИНЫ (ВАРИАНТЫ) | 2010 |
|
RU2515930C2 |
| US 5218301 A1, 08.06.1993 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

