УРОВЕНЬ ТЕХНИКИ
[001] Данное изобретение в целом относится к скважинной дальнометрии, а более конкретно, к визуализации траекторий бурения соседних стволов скважин с использованием периодических измерений и определения местоположений, в которых выполняются дополнительные периодические измерения.
[002] Добычу углеводородов, таких как нефть и газ, как правило, осуществляют из подземных пластов, которые могут располагаться на суше или на шельфе. В некоторых случаях работы по извлечению углеводородов из подземных пластов могут включать бурение второй скважины в непосредственной близости от первого ствола скважины. В зависимости от варианта применения, стволы скважин могут пересекаться или не пересекаться. Например, в первом стволе скважины может возникнуть фонтанирование (т. е. неконтролируемый выброс углеводородов из ствола скважины), что может потребовать бурение второго разгрузочного ствола скважины, целенаправленно пересекающего первый ствол скважины на некоторой глубине. В качестве другого примера, при использовании технологии гравитационного дренирования при закачке пара (ГДЗП) необходимо пробурить два практически параллельных ствола скважины таким образом, чтобы они не пересекались. Поэтому было бы желательно во время бурения получать информацию о местоположениях двух скважин относительно друг друга. Для этого во время бурения могут выполняться периодические измерения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[003] Для более полного понимания данного изобретения, а также его отличительных признаков и преимуществ была сделана ссылка на последующее описание, которое приводится в сочетании с прилагаемыми графическими материалами, на которых:
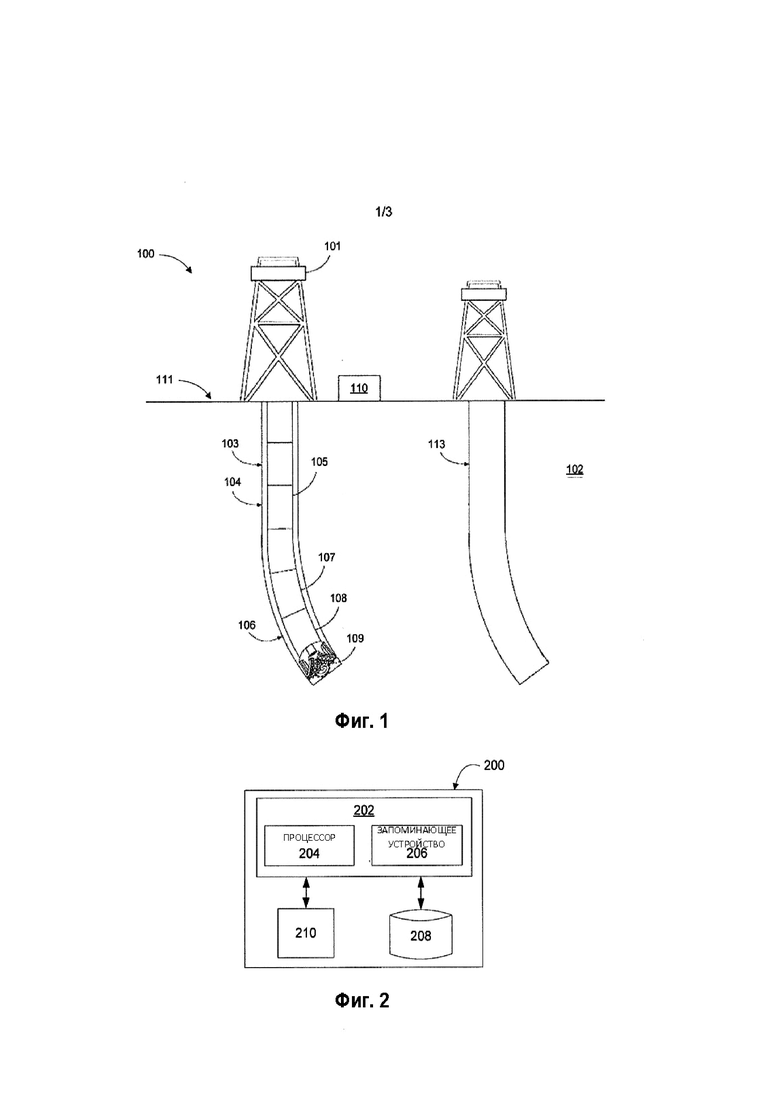
[004] На Фиг. 1 проиллюстрирован пример буровой системы в соответствии с вариантами реализации данного изобретения;
[005] На Фиг. 2 проиллюстрирована структурная схема приведенной в качестве примера вычислительной системы для использования в буровой системе, проиллюстрированной на Фиг. 1, в соответствии с вариантами реализации данного изобретения;
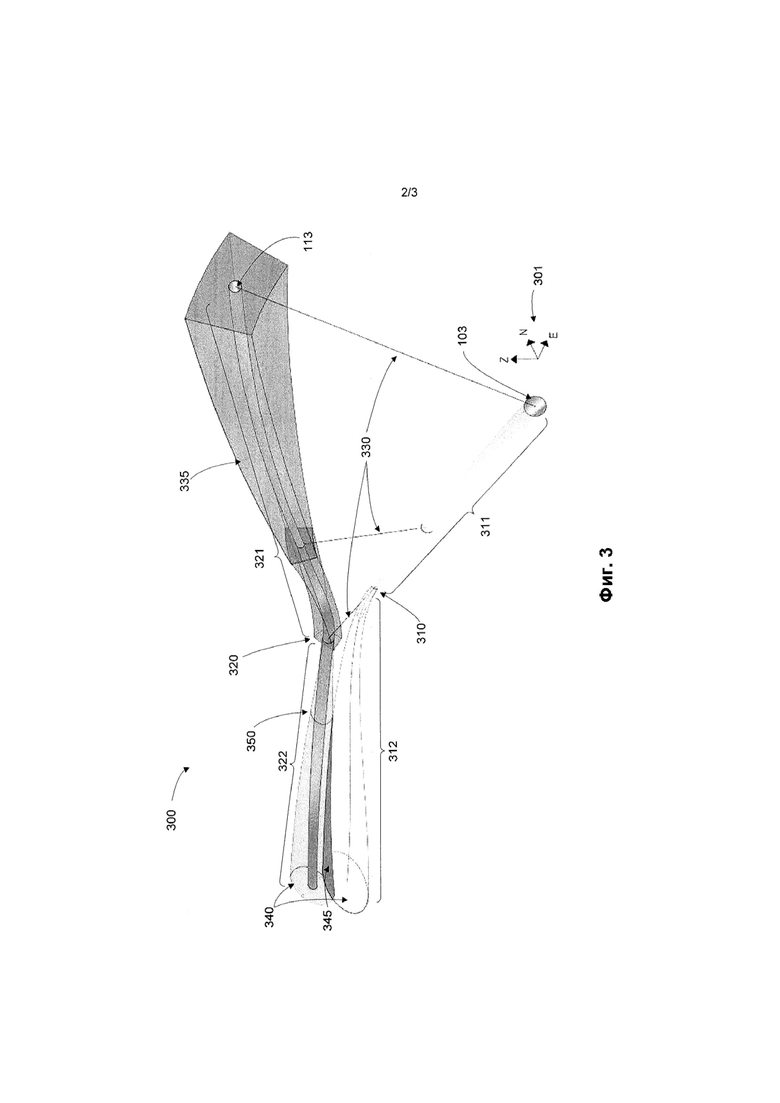
[006] На Фиг. 3 проиллюстрирован пример визуализации соответствующих местоположений стволов скважин, как проиллюстрировано на Фиг. 1, основанной на периодических измерениях в соответствии с вариантами реализации данного изобретения; и
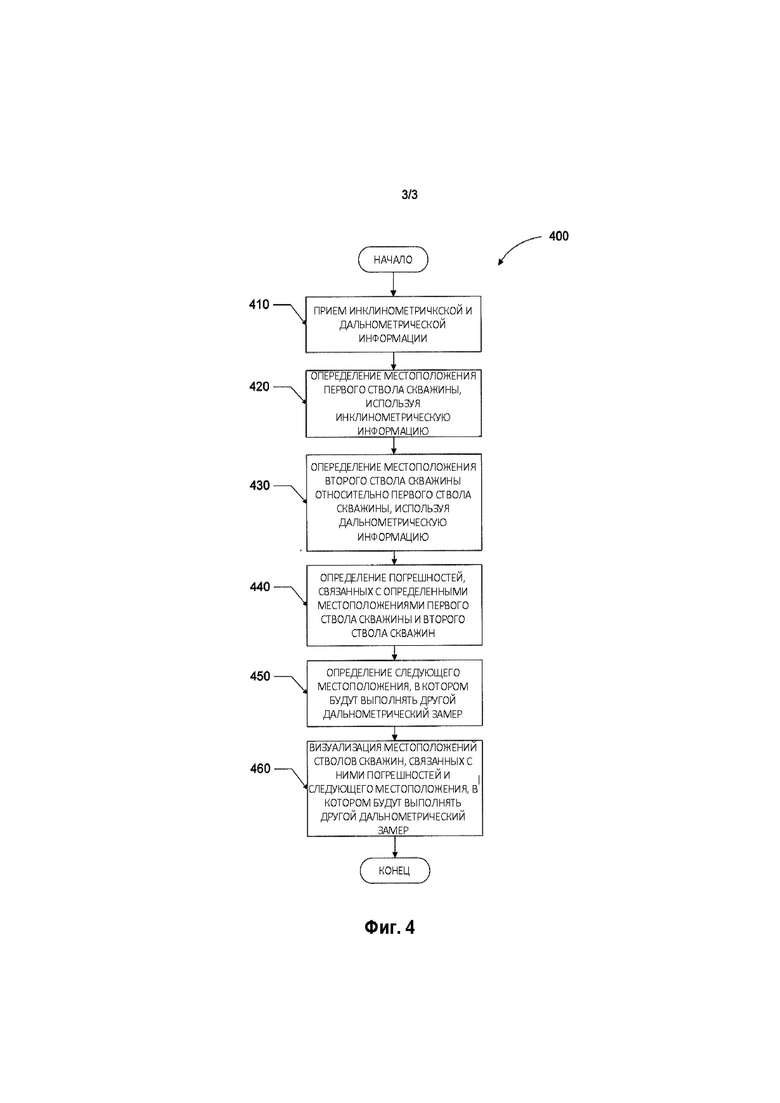
[007] На Фиг. 4 проиллюстрирован пример способа определения следующего местоположения, в котором выполняют измерение дальности в соответствии с вариантами реализации данного изобретения.
[008] Несмотря на то, что варианты реализации данного изобретения были изображены и описаны, а также изложены посредством ссылки на примеры вариантов реализации изобретения, данные ссылки не ограничивают и не подразумевают такое ограничение изобретения. Раскрываемый объект изобретения допускает значительную модификацию, изменение и эквиваленты по форме и функции, что будет очевидно для специалистов в данной области техники, извлекающих пользу из данного описания. Изображенные и описанные варианты реализации данного изобретения являются примерами и не ограничивают объем изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[001] В данном описании изобретения рассмотрены системы и способы визуализации соответствующих местоположений соседних скважин в трех измерениях, основанной на измерениях, выполненных на разных глубинах. Это может быть достигнуто благодаря использованию результатов инклинометрии и/или дальнометрии. Инклинометрические измерения могут выполняться вблизи устья скважины (например, на поверхности буровой системы) и могут обеспечивать данные, которые могут способствовать определению положения ствола скважины в трех измерениях относительно пласта. Результаты инклинометрии могут быть получены от таких инструментов, как акселерометры или гироскопы, расположенных в различных местоположениях вблизи ствола скважины. С другой стороны, результаты дальнометрии могут быть приняты в одной из двух скважин и могут обеспечивать данные, которые могут помочь в определении положений двух скважин относительно друг друга. Результаты дальнометрии могут быть получены от магнитных или электромагнитных средств измерения, расположенных в различных местоположениях внутри ствола скважины.
[002] Визуализация соответствующих местоположений скважин может содержать как полученную ранее траекторию (например, основанную на полученных ранее результатах дальнометрии), так и проектируемую последующую траекторию (основанную на текущей траектории бурения). В конкретных вариантах реализации изобретения местоположение второго ствола скважины может быть определено с использованием результатов дальнометрии и/или результатов инклинометрии. Соответственно, в визуализации могут быть определены и отображены диапазоны погрешности измерений (либо результатов дальнометрии, либо инклинометрии). В некоторых вариантах реализации изобретения в визуализации для каждой проектируемой траектории ствола скважины могут быть определены и представлены показатели неопределенности (например, посредством конусов и эллипсов), основываясь на моделях неопределенности, таких как модель на основе эллипса неопределенности Вольфа и де Вардта. При использовании проектируемых траекторий, включающих определенные показатели неопределенности, могут быть определены и отображены в визуализации зоны возможного пересечения скважин. Кроме того, при использовании проектируемых траекторий могут быть определены и отображены в визуализации глубины, на которых выполняются дополнительные измерения при инклинометрических измерениях. По мере выполнения дополнительных инклинометрических измерений и/или измерений дальности могут быть обновлены каждые из определенных и/или отображенных данных (например, траектории или диапазоны погрешности).
[003] Благодаря обеспечению трехмерной визуализации и определению местоположений, в которых выполняются дополнительные дальнометрические замеры, данное изобретение в значительной степени облегчает понимание оператором бурового оборудования степени воздействия текущего направленного бурения ствола скважины на второй ствол скважины и обеспечения нового подхода к определению момента времени, когда может потребоваться выполнение еще одного дальнометрического замера. Данное изобретение также в значительной степени содействует объединению в одну визуализацию неопределенности дальнометрии и неопределенности инклинометрии. Таким образом, данное изобретение может обеспечить более точную и сжатую визуализацию соответствующих местоположений и траекторий множества смежных стволов скважин.
[004] С целью облегчения понимания данного изобретения приводятся следующие примеры некоторых из вариантов реализации изобретения. Следующие примеры не следует воспринимать в качестве ограничения или определения объема изобретения. Варианты реализации данного изобретения и их преимущества можно лучше понять со ссылкой на Фиг. 1-4, на которых одинаковые числовые обозначения используются для указания одинаковых и соответствующих элементов.
[005] На Фиг. 1 проиллюстрирована типовая буровая система 100 в соответствии с вариантами реализации данного изобретения. Буровая система 100 содержит буровую установку 101 на поверхности 111, расположенную над стволом 103 скважины, который находится в пределах подземного пласта 102. В некоторых вариантах реализации изобретения с буровой установкой 101 с помощью бурильной колонны 105 может быть соединен буровой снаряд 104. В других вариантах реализации изобретения буровой снаряд 104 может быть соединен с буровой установкой 101, например, с использованием кабеля или каната. Буровой снаряд 104 может содержать компоновку низа бурильной колонны (КНБК) 106. КНБК 106 может содержать буровое долото 109, узел управления направлением бурения 108, а также прибор для КВБ/ИВБ (каротажа во время бурения/измерения во время бурения) 107. Блок управления 110, расположенный на поверхности 111, может содержать процессор и запоминающее устройство (например, вычислительное устройство 200, проиллюстрированное на Фиг. 2) и выполнен с возможностью обмена данными с элементами компоновки низа бурильной колонны 106, расположенными в приборе для КВБ/ИВБ 107 и узле управления направлением бурения 108. Блок управления 110 выполнен с возможностью приема данных и передачи управляющих сигналов на КНБК 106. Кроме того, для тех же целей в скважине внутри КНБК 106 могут быть расположены по меньшей мере один процессор и запоминающее устройство. Прибор для КВБ/ИВБ 107 выполнен с возможностью выполнения каротажа пласта 102 как во время бурении ствола скважины 103, так и после окончания бурения ствола скважины для получения информации о текущих подземных работах. Например, прибор для КВБ/ИВБ выполнен с возможностью каротажа траектории ствола скважины 103 во время буровых работ, при этом выполняя периодические дальнометрические замеры для определения относительного местоположения ствола скважины 113 или определения одной или более характеристик пласта 102 (например, удельного электрического сопротивления пласта, твердости и/или типа). Узел управления направлением бурения 108 может содержать забойный двигатель, приводящий в действие буровое долото 109 и вращаемый во время буровых работ вместе с буровым долотом 109. Забойный двигатель может быть винтовым забойным двигателем, в котором для приведения в действие бурового долота 109 используется гидравлическая энергия бурового раствора. В соответствии с вариантом реализации данного изобретения, КНБК 106 может содержать дополнительную невращающуюся часть. Дополнительная невращающаяся часть КНБК 106 может содержать любой из компонентов КНБК 106, кроме забойного двигателя и бурового долота 109. Например, дополнительная невращающаяся часть может содержать утяжеленную бурильную трубу, прибор для КВБ/ИВБ 107, переводник долота, стабилизаторы бурильной колонны, ударные освобождающие инструменты и переводные муфты. В некоторых вариантах реализации изобретения узел управления направлением бурения 108 выполнен с возможностью отклонения бурового долота 109 для бурения под углом к стволу скважины 103. Для поддержания осевого положения бурового долота 109 относительно ствола скважины 103 может потребоваться информация об угловом положении бурового долота 109 относительно ствола скважины 103.
[006] Как проиллюстрировано на Фиг. 1, ствол скважины 103 может находиться в относительной близости к стволу скважины 113. Ствол скважины 113 может быть существующим стволом скважины для углеводородной эксплуатационной скважины или может быть стволом скважины, который пробуривают одновременно со стволом скважины 103 с помощью буровой системы, аналогичной буровой установке 101, а также ее компонентов 103-109. В конкретных вариантах реализации ствол скважины 103 может быть пробурен таким образом, чтобы он пересекался со стволом скважины 113 в определенной точке. Например, ствол скважины 113 может быть существующей скважиной, в которой наблюдается фонтанирование или другая проблема, при этом ствол скважины 103 может быть пробурен в качестве разгрузочной скважины, пересекающей ствол скважины 113. В других вариантах реализации изобретения ствол скважины 103 может быть пробурен таким образом, чтобы избежать пересечения со стволом скважины 113. Например, стволы скважин 103 и 113 могут быть сдвоенными или параллельными скважинами для использования во время бурения в технологии ГДЗП (гравитационного дренирования при закачке пара).
[007] К Фиг. 1 могут быть сделаны изменения, дополнения или опущения, не выходя за пределы объема данного изобретения. Например, на Фиг. 1 проиллюстрированы компоненты буровой системы 100 в конкретной конфигурации. Однако может использоваться любая соответствующая конфигурация компонентов буровой установки для бурения углеводородной скважины. Кроме того, хотя это не проиллюстрировано на Фиг. 1, будет очевидно, что ствол скважины 113 может содержать один или более компонентов буровой установки (например, для вариантов реализации изобретения, в которых ствол скважины 113 пробуривают одновременно со стволом скважины 103) или компонентов для извлечения углеводородов (например, для вариантов реализации изобретения, в которых ствол скважины 113 является углеводородной эксплуатационной скважиной).
[008] На Фиг. 2 проиллюстрирована структурная схема приведенной в качестве примера вычислительной системы 200 для использования в буровой системе 100, проиллюстрированной на Фиг. 1, в соответствии с вариантами реализации данного изобретения. Вычислительная система 200 или ее компоненты могут быть расположены на поверхности (например, в блоке управления 110), в скважине (например, в КНБК 106 и/или приборе для КВБ/ИВБ 107), или в некоторой комбинации обоих местоположений (например, некоторые компоненты могут быть размещены на поверхности, в то время как некоторые другие компоненты могут быть размещены в скважине, причем поверхностные компоненты соединены со скважинными компонентами с возможностью связи).
[009] Вычислительная система 200 может быть выполнена с возможностью визуализации соответствующих местоположений первого ствола скважины и соседнего второго ствола скважины, основываясь на периодических измерениях (например, результатах дальнометрии и/или инклинометрии) в соответствии с принципами данного изобретения. Например, в некоторых вариантах реализации изобретения вычислительная система 200 может быть выполнена с возможностью формирования визуализации, аналогичной визуализации 300 на Фиг. 3. Кроме того, вычислительная система 200 может быть выполнена с возможностью определения местоположения, в котором во время бурения будет выполняться следующее периодическое измерение дальности. Например, вычислительная система 200 может использоваться для реализации этапов способа, описанного ниже применительно к Фиг. 4.
[0010] В конкретных вариантах реализации изобретения вычислительная система 200 может содержать модуль скважинной дальнометрии 202. Модуль скважинной дальнометрии 202 может содержать любые соответствующие компоненты. Например, в некоторых вариантах реализации изобретения модуль скважинной дальнометрии 202 может содержать процессор 204. Процессор 204 может содержать, например, микропроцессор, микроконтроллер, цифровой сигнальный процессор (DSP), интегральную схему специального назначения (ASIC) или любую другую цифровую или аналоговую схему, выполненную с возможностью интерпретации и/или выполнения программных команд и/или обработки данных. В некоторых вариантах реализации изобретения процессор 204 может быть соединен с возможностью связи с запоминающим устройством 206. Процессор 204 может быть выполнен с возможностью интерпретации и/или выполнения программных команд или других данных, полученных и сохраненных в памяти 206. Программные команды или другие данные могут представлять собой часть программного обеспечения 208 для реализации одного или более способов, описанных в данной заявке. Запоминающее устройство 206 может содержать любую систему, устройство или прибор, выполненные с возможностью удержания и/или размещения одного или более модулей памяти; например, запоминающее устройство 206 может содержать постоянное запоминающее устройство, оперативную память, полупроводниковую память или дисковую память. Каждый модуль памяти может содержать любую систему, устройство или прибор, выполненные с возможностью хранения программных команд и/или данных в течение периода времени (например, машиночитаемый энергонезависимый носитель). Например, команды из программного обеспечения 208 могут быть получены и сохранены в памяти 206 для выполнения процессором 204.
[0011] В конкретных вариантах реализации изобретения модуль скважинной дальнометрии 202 выполнен с возможностью связи с одним или более мониторов 210 так, чтобы информация, обрабатываемая модулем скважинной дальнометрии 202 могла передаваться операторам бурового и каротажного оборудования. Например, модуль скважинной дальнометрии 202 выполнен с возможностью передачи результатов дальнометрии, инклинометрии или других измерений от прибора для КВБ/ИВБ 107 к монитору 210. В качестве другого примера, модуль скважинной дальнометрии 202 выполнен с возможностью формирования одной или более визуализаций стволов скважин и соответствующих им траекторий, аналогичных визуализации 300, проиллюстрированной на Фиг. 3.
[0012] К Фиг. 2 могут быть сделаны изменения, дополнения или опущения, не выходя за пределы объема данного изобретения. Например, на Фиг. 2 проиллюстрирована конкретная конфигурация компонентов вычислительной системы 200. Однако, может использоваться любая конфигурации компонентов. Например, компоненты вычислительной системы 200 могут быть реализованы в виде физических или логических компонентов. Кроме того, в некоторых вариантах реализации изобретения функции, связанные с компонентами вычислительной системы 200, могут быть реализованы в виде схем или компонентов для специального использования. В других вариантах реализации изобретения функции, связанные с компонентами вычислительной системы 200, могут быть реализованы в виде конфигурируемых схем или компонентов общего назначения. Например, компоненты вычислительной системы 200 могут быть реализованы посредством конфигурируемых команд компьютерной программы.
[0013] На Фиг. 3 проиллюстрирован пример визуализации 300 соответствующих местоположений стволов скважин 103 и 113 на Фиг. 1 на основании периодических измерений в соответствии с вариантами реализации данного изобретения. В частности, на Фиг. 3 проиллюстрирован перспективный вид ствола скважины 103 и ствола скважины 113 при рассмотрении двух стволов скважин сверху вниз от поверхности и с отклонением влево. В некоторых вариантах реализации изобретения оператор буровой системы во время буровых работ может вращать, масштабировать, или иным образом манипулировать визуализацией для получения любой требуемой перспективы. В некоторых вариантах реализации изобретения для облегчения понимания оператором буровой системы относительных ориентаций и положений двух скважин относительно некоторого ориентира (например, поверхности) может быть предусмотрен указатель ортогональной системы координат 301, как проиллюстрировано на Фиг. 3. Визуализация 300 содержит предыдущие траектории 311 и 321 стволов скважины 103 и 113, соответственно, а также последующие траектории 312 и 322 стволов скважины 103 и 113, соответственно. Предыдущие траектории 311 и 321 могут представлять путь соответствующих стволов скважин в пласте 102 на глубинах выше текущей глубины одного или обоих стволов скважин (например, текущей глубины 310 ствола скважины 103 или текущей глубины 320 ствола скважины 113), в то время как последующие траектории 312 и 322 могут представлять путь соответствующих стволов скважин в пласте 102 на глубинах ниже текущей глубины одного или обоих стволов скважин. Например, в вариантах реализации изобретения, в которых ствол скважины 103 должен быть разгрузочной скважиной для существующего ствола скважины 113, последующая траектория 312 ствола скважины 103 может представлять проектируемую траекторию ствола скважины 103 при текущих условиях управления направлением бурения для ствола скважины 103, в то время как последующая траектория 322 ствола скважины 113 может представлять прогнозируемый путь существующей скважины 113, основываясь на результатах инклинометрии и/или дальнометрии. В качестве другого примера, в вариантах реализации изобретения, в которых ствол скважины 103 и ствол скважины 113 пробуривают одновременно, последующая траектория 312 ствола скважины 103 может отображать проектируемый путь ствола скважины 103, основанный на измерениях, таких как инклинометрические измерения и дальнометрические замеры, в то время как последующая траектория 322 ствола скважины 113 может представлять проектируемый путь ствола скважины 113, основанный на текущих условиях управления направлением бурения и/или результатах инклинометрии или дальнометрии.
[0014] Визуализация 300 содержит три результата дальнометрии 330, выполненной из ствола скважины 310 на различных глубинах, которые могут указывать на предполагаемое расстояние между первым стволом скважины 310 и вторым стволом скважины 320. В некоторых вариантах реализации изобретения визуализация 300 может содержать указания глубин, на которых выполнялись дальнометрические замеры (не показано на Фиг. 3). Каждый из результатов дальнометрии 330 может быть связан с погрешностью дальнометрии, которая может указывать на уровень доверительной вероятности результатов дальнометрии применительно к расстоянию и/или направлению, определенным посредством дальнометрии 330. В некоторых вариантах реализации изобретения в визуализации 300 может быть указана погрешность дальнометрии (на Фиг. 3 проиллюстрирована в виде затененной части, окружающей предыдущую траекторию 321 ствола скважины 320, называемого в данной заявке окном погрешности дальнометрии 335). В конкретных вариантах реализации изобретения на основании погрешности дальнометрии могут быть определены минимальное и максимальное значения, связанные с расстоянием до второго ствола скважины из первого ствола скважины. В некоторых вариантах реализации изобретения может быть определен диапазон, связанный с направлением на второй ствол скважины из первого ствола скважины. Как проиллюстрировано на Фиг. 3, первая дуга в окне погрешности дальнометрии 335 указывает определенное минимальное расстояние до второго ствола скважины, а верхняя дуга окна погрешностей дальнометрии 335 указывает определенное максимальное расстояние до второго ствола скважины. Левая и правая стороны окна погрешности дальнометрии 335 отображают определенный диапазон погрешности определения направления до второго ствола скважины. В конкретных вариантах реализации изобретения окно погрешности дальнометрии 335 может представлять собой плоскость в пласте, через которую может проходить второй ствол скважины. Размер окна погрешности дальнометрии 335 может определяться точностью дальнометрии и может изменяться для каждого диапазона измерений, выполненных во время бурения (например, из-за различия свойств пласта на различных глубинах).
[0015] В конкретных вариантах реализации изобретения для обозначения в визуализации 300 одного или более свойств пласта ствол скважины 103 и/или ствол скважины 113 может быть затенен, окрашен или помечен иным образом. Данные указания могут помочь оператору буровой системы при определении возможных причин определенной погрешности дальнометрии. Например, первый ствол скважины 310 может быть затенен на разных глубинах, указанных в визуализации 300 для обозначения удельного электрического сопротивления пласта, типа пласта или прочности пласта. В качестве другого примера, в буровой системе для ГДЗП (гравитационного дренирования при закачке пара) первый ствол скважины 310 может быть окрашен для обозначения конкретных сегментов, в которых между первым стволом скважины 310 и вторым стволом скважины 320 имеется достаточный зазор, и/или сегментов, в которых первый ствол скважины 310 находится слишком близко ко второму стволу скважины 320, которые могут помочь оператору буровой установки должным образом выполнить управление направлением бурения ствола скважины для работ по извлечению углеводородов при ГДЗП, а также предотвратить нежелательные пересечения.
[0016] В вариантах реализации изобретения, в которых в визуализации 300 отображается окно погрешности дальнометрии 335, значения окна погрешности для промежуточных глубин могут быть определены с помощью методов интерполяции. Подразумевается, что для определения и визуализации окна погрешности дальнометрии 335 в визуализации 300 может использоваться любой подходящий способ. Например, для корректировки размера окна погрешности по сравнению с размером ствола скважины 113 наряду с методом линейного масштабирования может использоваться метод минимальной кривизны. К визуализации затем может быть добавлена трехмерная перспектива для того, чтобы предметы, расположенные дальше, казались меньше, а предметы, расположенные ближе, казались больше.
[0017] В конкретных вариантах реализации изобретения визуализация 300 также может содержать представление погрешности для последующих траекторий 312 и 322. Например, для определения диапазона погрешности в последующих траекториях 312 и 322, могут использоваться модели погрешности на основе кумулятивного эффекта результатов инклинометрии (например, модель на основе эллипса неопределенности Вольфа и де Вардта). Этот диапазон погрешности может быть проиллюстрирован на визуализации с коническим или эллиптическим затенением, как проиллюстрировано на Фиг. 3, причем коническое затенение находится вокруг последующих траекторий 312 и 322 (называемое в данной заявке окно погрешности инклинометрии 340). В некоторых вариантах реализации изобретения окно погрешности инклинометрии 340 может начинаться с нулевой погрешности на текущих глубинах 310 и 320 и расширяться по мере увеличения глубины, как проиллюстрировано на Фиг. 3, или может начинаться со значения погрешности дальнометрии, определенного для текущих глубин 310 и 320 и расширяться от этого значения по мере увеличения глубины (например, окно погрешности инклинометрии 340 начнется в конце окна погрешности дальнометрии 335). В некоторых вариантах реализации изобретения определенные погрешность дальнометрии и погрешность инклинометрии могут быть объединены в точке перехода и вблизи нее (т. е. на глубине 320) между двумя моделями так, чтобы максимальная погрешность, определяемая для каждой в любом направлении, использовалась для представления области неопределенности (т.е., окна погрешности инклинометрии 340) от точки перехода. Например, форма окна погрешности инклинометрии 340 может переходить из сегментов кольцевой формы (как проиллюстрировано на визуализации 300 в виде окна погрешности дальнометрии 335) в сегмент эллиптической формы (как проиллюстрировано на визуализации 300 в виде окна погрешности инклинометрии 340) в интервале глубин, поскольку эллипс погрешности увеличивается в размерах относительно погрешности дальнометрии, в то время как глубина увеличивается за пределы точки перехода между погрешностью дальнометрии и погрешностью инклинометрии. В конкретных вариантах реализации изобретения визуализация 300 может дополнительно содержать представление, в котором окно погрешности инклинометрии 340 для стволов скважины 103 и 113 пересекаются (в данной заявке называется областью пересечения 345), что может указывать на потенциальную область пересечения двух стволов скважин.
[0018] В конкретных вариантах реализации изобретения визуализация 300 может обновляться по мере продолжения процесса бурения. Например, предыдущие траектории 311 и 321 и последующие траектории 312 и 322 могут обновляться по мере продолжения дальнейшего бурения пласта (т. е. по мере изменения текущих глубин 310 и 320). Последующие траектории 312 и 322 могут быть обновлены, по мере изменения направления бурения стволов скважин 103 или 113. Кроме того, окно погрешности дальнометрии 335 и окна погрешности инклинометрии 340 могут изменяться по мере продолжения процесса бурения и/или получения дополнительных результатов измерений. Это может включать сброс исходной точки (либо до нуля, либо до последнего значения в окне погрешности дальнометрии 335) окон погрешности инклинометрии 340 каждый раз при изменении текущей глубины 310 и 320 или каждый раз при выполнении дополнительных измерений. Кроме того, по мере изменения окна погрешности инклинометрии 340 соответственно может изменяться отображаемая область пересечения 345.
[0019] Как дополнительно описано ниже со ссылкой на Фиг. 4, последующая глубина, на которой будут выполнять следующее измерение дальности 330, может быть определена на основе одного или более факторов (например, основываясь на текущем местоположении стволов скважин и проектируемых траекторий стволов скважин), и может быть отображена в визуализации как следующая глубина измерения 350.
[0020] В конкретных вариантах реализации изобретения в визуализации 300 могут быть сформированы и отображены предупреждения. Например, для оператора буровой системы может формироваться предупреждение на основании определенной следующей глубины измерения 350, например, в случае приближения текущей глубины бурения 310 к следующей глубине измерения 350. В некоторых вариантах реализации изобретения в случае продвижения оператором мимо рекомендованной следующей глубины измерения 350, буровая система может приостановить бурение до момента выполнения дополнительных измерений. В качестве другого примера, предупреждение может быть сформировано на основании последующих траекторий 312 и 322, например, когда траектории указывают на возможность отклонения стволов скважин 103 и 113 за пределы целевого диапазона пространственного разноса (который также может быть отображен в визуализации 300, аналогично тому, как на Фиг. 3 отображена область пересечения 345).
[0021] К Фиг. 3 могут быть сделаны изменения, дополнения или опущения, не выходя за пределы объема данного изобретения. Например, кроме описанных, визуализация может содержать другие указатели, такие как указатели глубины или указатели свойств пласта. Кроме того, формы, затенение или цвета элементов в визуализации 300 могут зависеть от технологии бурения или ожидаемых результатов. Например, в случае, когда пересечение между стволами скважин 103 и 113 не требуется (например, в технологии ГДЗП), область пересечения 350 может быть окрашена в красный цвет, а в случае, когда требуется пересечение между стволами скважины 103 и 113 (например, в случае разгрузочной скважины), окрашена в зеленый цвет.
[0022] На Фиг. 4 проиллюстрирован пример способа 400 для определения следующего местоположения для выполнения дальнометрического замера в соответствии с вариантами реализации данного изобретения. Способ начинается с этапа 410, на котором принимают инклинометрическую и дальнометрическую информацию. Информация может быть принята вычислительной системой, такой как вычислительная система 200, проиллюстрированная на Фиг. 2, и может быть принята из любой системы для инклинометрии и дальнометрии, соответственно. Например, для получения информации о пласте 102, проиллюстрированном на Фиг. 1, результаты инклинометрии могут приниматься на поверхности ствола скважины с использованием акселерометров или гироскопов, а затем могут передаваться для обработки в блок управления 110. Дальнометрия в пласте может выполняться из первого ствола скважины, например, с помощью электромагнитных сигналов.
[0023] С помощью принятой инклинометрической информации на этапе 420 может быть определено местоположение первого ствола скважины внутри пласта. Подобным образом, с помощью принятой дальнометрической информации на этапе 430 может быть определено местоположение второго ствола скважины внутри пласта. В некоторых вариантах реализации изобретения местоположение второго ствола может определяться относительно первого ствола скважины. В некоторых вариантах реализации изобретения принятая инклинометрическая информация может также использоваться для определения местоположения в пласте второго ствола скважины. Местоположения первого и второго стволов скважин могут содержать предыдущие траектории соответствующих стволов скважин (например, проиллюстрированные на визуализации на Фиг. 3 как предыдущие траектории 311 и 321), или длину пути соответствующего ствола скважины через пласт до текущей глубины. В некоторых вариантах реализации изобретения местоположения первого и второго стволов скважины могут содержать последующие траектории соответствующих стволов скважин (например, проиллюстрированных на визуализации на Фиг. 3 как последующие траектории 312 и 322). В некоторых вариантах реализации последующие траектории могут быть спроектированы как незавершенные стволы скважин (например, разгрузочную скважину пробуривают до пересечения с фонтанирующей скважиной), а также на основании текущей глубины, предыдущей траектории и/или текущего угла направленного бурения буровой системы. В некоторых вариантах реализации изобретения последующие траектории также могут прогнозироваться для существующего ствола скважины (например, фонтанирующей скважины при бурении разгрузочной скважины) и могут основываться на инклинометрических измерениях.
[0024] На этапе 440 определяют погрешности, связанные с определенными местоположениями первого ствола скважины и второго ствола скважины. Погрешности могут быть связаны с предыдущей траекторией соответствующего ствола скважины, последующей траекторией соответствующей скважины или с обеими траекториями. Например, погрешность предыдущей траектории второго ствола скважины может содержать погрешность вычисления дальности. Погрешность вычисления дальности может быть обусловлена, например, используемым оборудованием для дальнометрии или свойствами пласта. Пример погрешности дальнометрии приводится на Фиг. 3 со ссылкой на окно погрешности дальнометрии 335. В качестве другого примера, погрешность предыдущей или последующей траектории ствола скважины может содержать погрешность вычисления дальности. Ошибка вычисления при инклинометрических измерениях может быть обусловлена, например, используемым оборудованием для инклинометрии или свойствами пласта. Пример погрешности вычислений при инклинометрических измерениях приводится на Фиг. 3 со ссылкой на окно погрешности 340 для ствола скважины 113. В конкретных вариантах реализации изобретения погрешности, связанные с последующими траекториями ствола скважины, могут быть обусловлены кумулятивной моделью, такой как модель на основе эллипса неопределенности Вольфа и де Вардта.
[0025] На этапе 450 определяют следующее местоположение, в котором выполняют другое измерение дальности. Следующее определенное местоположение может основываться на местоположении первого ствола скважины, местоположении второго ствола скважины, определенных погрешностях, связанных с соответствующими местоположениями первого и второго стволов скважин или их комбинации. В некоторых вариантах реализации изобретения определенное местоположение, в котором будет выполняться другое измерение дальности, может основываться на определенном местоположении возможного пересечения первого и второго стволов скважин. Местоположение возможного пересечения может быть определено на основании местоположения первого ствола скважины, местоположения второго ствола скважины, определенных погрешностей, связанных с соответствующими местоположениями первого ствола скважины и второго ствола скважины или их комбинации. Например, местоположение возможного пересечения может быть определено посредством вычисления последующих траекторий двух соответствующих стволов скважин, а затем посредством дополнительного вычисления с учетом определенных погрешностей относительно этих последующих местоположений. На Фиг. 3 последующие траектории 312 и 322 могут иметь связанные с ними окна погрешностей 340, при этом местоположение возможного пересечения может быть определено посредством пересечения окон погрешностей (проиллюстрировано на Фиг. 3 в виде области пересечения 345). Определенное местоположение, в котором будет выполняться другое измерение дальности, может находиться вблизи определенного местоположения возможного пересечения и для предотвращения возможного пересечения между стволами скважин может находиться в скважине до определенного местоположения возможного пересечения.
[0026] На этапе 460 визуализируют местоположения первого и второго стволов скважин. Визуализация может быть аналогична визуализации 300, проиллюстрированной на Фиг. 3, с определенным перспективным видом и может содержать любую подходящую визуализацию аспекта первого ствола скважины или второго ствола скважины. Например, визуализация может содержать предыдущие и последующие траектории стволов скважин. В качестве другого примера, визуализация может содержать указатель оси в качестве ориентира на перспективном виде визуализации. В некоторых вариантах реализации изобретения может быть изменен перспективный вид визуализации. Например, визуализация может быть увеличена или повернута оператором буровой системы. Кроме того, визуализация может периодически обновляться. Например, как описано ниже, визуализация может обновляться по мере накопления дополнительных данных, таких как информация дополнительных измерений дальности или инклинометрии.
[0027] В конкретных вариантах реализации изобретения второе измерение дальности может выполняться рядом с местоположением, определенным на этапе 450 (не показано на Фиг. 4). В некоторых вариантах реализации изобретения это также может включать выполнение дополнительных инклинометрических измерений. С помощью новой информации измерений дальности и/или инклинометрии, полученной при новых измерениях, могут быть обновлены соответствующие местоположения первого и второго стволов скважины, а также могут быть повторены этапы способа 400. Например, может быть определено новое местоположение, в котором будет выполняться другое измерение дальности и, следовательно, может быть обновлена соответствующая информация в визуализации.
[0028] В конкретных вариантах реализации изобретения до или после любых этапов 410-460 может формироваться одно или более предупреждений. Предупреждения могут быть основаны на информации, собранной или определенной посредством буровой системы. Например, предупреждения могут указывать на следующее местоположение, в котором можно выполнить другое измерение дальности, определенное на этапе 450, которое может быть основано на местоположениях или погрешностях, связанных с соответствующими стволами скважин. По мере приближения буровой системы к определенному местоположению (например, система находится в пределах 100 метров от определенного местоположения), может быть сформировано предупреждение для указания оператору на возможную необходимость выполнить другое измерение дальности. В качестве другого примера, предупреждения могут указывать на близость буровой системы к определенному местоположению возможного пересечения. Например, предупреждение может быть сформировано во время размещения буровой системы в пределах 200 метров от местоположения возможного пересечения для предупреждения оператора о возможном пересечении с другой скважиной.
[0029] К способу 400 могут быть сделаны изменения, дополнения или опущения, не выходя за пределы объема данного изобретения. Например, этапы могут выполняться в другом порядке, чем это описано, при этом некоторые этапы могут выполняться одновременно. Кроме того, каждый отдельный этап может включать дополнительные этапы, не выходя за пределы объема данного изобретения.
[0030] Следующие примеры приводятся для иллюстрации одного или более вариантов реализации данного изобретения. В одном варианте реализации изобретения система дальнометрии содержит процессор, запоминающее устройство и модуль скважинной дальнометрии. Модуль скважинной дальнометрии выполнен с возможностью приема инклинометрической информации в ответ на сигнал инклинометрических измерений и определения в пласте местоположения первого ствола скважины, основываясь на инклинометрической информации. Модуль скважинной дальнометрии также выполнен с возможностью приема первой дальнометрической информации в ответ на первый дальнометрический сигнал, переданный из первого ствола скважины на первой глубине в первом стволе скважины, и определения в пласте местоположения второго ствола скважины и погрешности местоположения второго ствола скважины, связанной с определением в пласте местоположения второго ствола скважины, на основании первой дальнометрической информации. Модуль скважинной дальнометрии выполнен с дополнительной возможностью определения второй глубины в первом стволе скважины, на которой передается второй дальнометрический сигнал, используя местоположение первого ствола скважины, местоположение второго ствола скважины и погрешность местоположения второго ствола скважины.
[0031] В одном или более аспектах описанной системы местоположение второго ствола скважины дополнительно основывается на принятой инклинометрической информации, и погрешность местоположения второго ствола скважины дополнительно основывается на принятой инклинометрической информации. В одном или более аспектах описанной системы определенное местоположение первого ствола скважины содержит предыдущую траекторию первого ствола скважины в пласте, а определенное местоположение второго ствола скважины содержит предыдущую траекторию второго ствола скважины в пласте. В одном или более аспектах описанной системы определенное местоположение второго ствола скважины дополнительно содержит последующую траекторию второго ствола скважины в пласте, при этом модуль скважинной дальнометрии дополнительно выполнен с возможностью определения последующей траектории первого ствола скважины на основании местоположения в пласте первого ствола скважины и текущего угла направленного бурения первого ствола скважины. В одном или более аспектах описанной системы модуль скважинной дальнометрии дополнительно выполнен с возможностью определения погрешности местоположения первого ствола скважины, связанной с последующей траекторией первого ствола скважины, причем погрешность местоположения второго ствола скважины содержит первую часть и вторую часть, при этом первая часть связана с предыдущей траекторией второго ствола скважины, а вторая часть связана с последующей траекторией второго ствола скважины. В одном или более аспектах описанной системы модуль скважинной дальнометрии дополнительно выполнен с возможностью определения местоположения в пласте, в котором может произойти пересечение первого ствола скважины и второго ствола скважины, используя погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины. В одном или более аспектах описанной системы модуль скважинной дальнометрии дополнительно выполнен с возможностью определения погрешности местоположения первого ствола скважины и погрешности местоположения второго ствола скважины, используя модель на основе эллипса неопределенности Вольфа и де Вардта.
[0032] В одном или более аспектах описанной системы модуль скважинной дальнометрии дополнительно выполнен с возможностью приема второй дальнометрической информации в ответ на второй дальнометрический сигнал, переданный из первого ствола скважины вблизи определенной второй глубины в первом стволе скважины, обновления местоположения второго ствола скважины на основании первой дальнометрической информации, обновления погрешности местоположения второго ствола скважины на основании первой дальнометрической информации и определения обновленного местоположения второго ствола скважины и обновленной погрешности местоположения второго ствола скважины, третьей глубины в первом стволе скважины, на которой передается третий дальнометрический сигнал, используя обновленное местоположение первого ствола скважины. В одном или более аспектах описанной системы модуль скважинной дальнометрии дополнительно выполнен с возможностью формирования одного или более предупреждений.
[0033] В одном или более аспектах описанной системы модуль скважинной дальнометрии дополнительно выполнен с возможностью формирования трехмерной визуализации, содержащей определенные местоположения первого ствола скважины и второго ствола скважины. В одном или более аспектах описанной системы визуализация дополнительно содержит погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины. В одном или более аспектах описанной системы визуализация дополнительно содержит указатель оси. В одном или более аспектах описанной системы, в которой модуль скважинной дальнометрии дополнительно выполнен с возможностью изменения перспективного вида визуализации. В одном или более аспектах описанной системы модуль скважинной дальнометрии дополнительно выполнен с возможностью периодического обновления визуализации.
[0034] В другом варианте реализации изобретения способ определения местоположений, в которых выполняют дальнометрические замеры в стволе скважины, включает этапы приема инклинометрической информации в ответ на сигнал инклинометрических измерений и определения в пласте местоположения первого ствола скважины на основании инклинометрической информации. Способ также включает этапы приема первой дальнометрической информации в ответ на первый дальнометрический сигнал, переданный из первого ствола скважины на первой глубине в первом стволе скважины, и определения в пласте местоположения второго ствола скважины и погрешности местоположения второго ствола скважины, связанной с определением местоположения в пласте второго ствола скважины, на основании первой дальнометрической информации. Способ также включает этап определения второй глубины в первом стволе скважины, на которой передается второй дальнометрический сигнал, используя местоположение первого ствола скважины, местоположение второго ствола скважины и погрешность местоположения второго ствола скважины.
[0035] В одном или более аспектах описанного способа местоположение второго ствола скважины дополнительно основывается на принятой инклинометрической информации, и погрешность местоположения второго ствола скважины дополнительно основывается на принятой инклинометрической информации. В одном или более аспектах описанного способа определенное местоположение первого ствола скважины содержит предыдущую траекторию первого ствола скважины в пласте, а определенное местоположение второго ствола скважины содержит предыдущую траекторию второго ствола скважины в пласте. В одном или более аспектах описанного способа определенное местоположение второго ствола скважины дополнительно содержит последующую траекторию второго ствола скважины в пласте, при этом модуль скважинной дальнометрии дополнительно выполнен с возможностью определения последующей траектории первого ствола скважины на основании местоположения в пласте первого ствола скважины и текущего угла направленного бурения первого ствола скважины. В одном или более аспектах описанного способа модуль скважинной дальнометрии дополнительно выполнен с возможностью определения погрешности местоположения первого ствола скважины, связанной с последующей траекторией первого ствола скважины, причем погрешность местоположения второго ствола скважины содержит первую часть и вторую часть, при этом первая часть связана с предыдущей траекторией второго ствола скважины, а вторая часть связана с последующей траекторией второго ствола скважины. В одном или более аспектах описанного способа модуль скважинной дальнометрии дополнительно выполнен с возможностью определения местоположения в пласте, в котором может произойти пересечение первого ствола скважины и второго ствола скважины, используя погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины. В одном или более аспектах описанного способа модуль скважинной дальнометрии дополнительно выполнен с возможностью определения погрешности местоположения первого ствола скважины и погрешности местоположения второго ствола скважины, используя модель на основе эллипса неопределенности Вольфа и де Вардта.
[0036] В одном или более аспектах описанного способа модуль скважинной дальнометрии дополнительно выполнен с возможностью приема второй дальнометрической информации в ответ на второй дальнометрический сигнал, переданный из первого ствола скважины вблизи определенной второй глубины в первом стволе скважины, обновления местоположения второго ствола скважины на основании первой дальнометрической информации, обновления погрешности местоположения второго ствола скважины на основании первой дальнометрической информации, и определения третьей глубины в первом стволе скважины, на которой передается третий дальнометрический сигнал, используя обновленное местоположение первого ствола скважины, обновленное местоположение второго ствола скважины и обновленной погрешности местоположения второго ствола скважины. В одном или более аспектах описанного способа способ дополнительно включает формирование одного или более предупреждений.
[0037] В одном или более аспектах описанного способа способ дополнительно включает этап формирования трехмерной визуализации, содержащей определенные местоположения первого ствола скважины и второго ствола скважины. В одном или более аспектах описанного способа визуализация дополнительно содержит погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины. В одном или более аспектах описанного способа визуализация дополнительно содержит указатель оси. В одном или более аспектах описанного способа способ дополнительно включает этап изменения перспективного вида визуализации. В одном или более аспектах описанного способа способ дополнительно включает этап периодического обновления визуализации.
[0038] В другом варианте реализации изобретения машиночитаемый носитель содержит команды, которые при выполнении процессором заставляют процессор принимать инклинометрическую информацию в ответ на сигнал инклинометрических измерений и определять местоположение в пласте первого ствола скважины на основании инклинометрической информации. Также, команды при выполнении процессором могут заставлять процессор принимать первую дальнометрическую информацию в ответ на первый дальнометрический сигнал, переданный из первого ствола скважины на первой глубине в первом стволе скважины, и определять местоположение второго ствола скважины в пласте и погрешности местоположения второго ствола скважины, связанной с определением местоположения в пласте второго ствола скважины, на основании первой дальнометрической информации. Команды при выполнении процессором могут дополнительно заставлять процессор определять вторую глубину в первом стволе скважины, на которой передается второй дальнометрический сигнал, используя местоположение первого ствола скважины, местоположение второго ствола скважины и погрешность местоположения второго ствола скважины.
[0039] В одном или более аспектах описанного машиночитаемого носителя местоположение второго ствола скважины дополнительно основывается на принятой инклинометрической информации, и погрешность местоположения второго ствола скважины дополнительно основывается на принятой инклинометрической информации. В одном или более аспектах описанного машиночитаемого носителя определенное местоположение первого ствола скважины содержит предыдущую траекторию первого ствола скважины в пласте, а определенное местоположение второго ствола скважины содержит предыдущую траекторию второго ствола скважины в пласте. В одном или более аспектах описанного машиночитаемого носителя определенное местоположение второго ствола скважины дополнительно содержит последующую траекторию второго ствола скважины в пласте, при этом носитель дополнительно содержит команды, которые при выполнении процессором заставляют процессор определять последующую траекторию первого ствола скважины на основании местоположения первого ствола скважины в пласте и текущего угла направленного бурения первого ствола скважины. В одном или более аспектах описанного машиночитаемого носителя носитель дополнительно содержит команды, которые при выполнении процессором заставляют процессор определять погрешности местоположения первого ствола скважины, связанной с последующей траекторией первого ствола скважины, причем погрешность местоположения второго ствола скважины содержит первую часть и вторую часть, при этом первая часть связана с предыдущей траекторией второго ствола скважины, и вторая часть связана с последующей траекторией второго ствола скважины. В одном или более аспектах описанного машиночитаемого носителя носитель дополнительно содержит команды, которые при выполнении процессором заставляют процессор определять местоположение в пласте, в котором может произойти пересечение первого ствола скважины и второго ствола скважины, используя погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины. В одном или более аспектах описанного машиночитаемого носителя носитель дополнительно содержит команды, которые при выполнении процессором заставляют процессор определять погрешности местоположения первого ствола скважины и погрешности местоположения второго ствола скважины, используя модель на основе эллипса неопределенности Вольфа и де Вардта.
[0040] В одном или более аспектах описанного машиночитаемого носителя осуществляют прием второй дальнометрической информации в ответ на второй дальнометрический сигнал, переданный из первого ствола скважины вблизи определенной второй глубины в первом стволе скважины, обновление местоположения второго ствола скважины на основании первой дальнометрической информации, обновление погрешности местоположения второго ствола скважины на основании первой дальнометрической информации и определение обновленного местоположения второго ствола скважины и обновленной погрешности местоположения второго ствола скважины, третьей глубины в первом стволе скважины, на которой передается третий дальнометрический сигнал, используя обновленное местоположение первого ствола скважины. В одном или более аспектах описанного машиночитаемого носителя носитель дополнительно содержит команды, которые при выполнении процессором заставляют процессор формировать предупреждения.
[0041] В одном или более аспектах описанного машиночитаемого носителя носитель дополнительно содержит команды, которые при выполнении процессором заставляют процессор формировать трехмерную визуализацию, содержащую определенные местоположения первого ствола скважины и второго ствола скважины. В одном или более аспектах описанного машиночитаемого носителя визуализация дополнительно содержит погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины. В одном или более аспектах описанного машиночитаемого носителя визуализация дополнительно содержит указатель оси. В одном или более аспектах описанного машиночитаемого носителя носитель дополнительно содержит команды, которые при выполнении процессором заставляют процессор изменять перспективный вид визуализации. В одном или более аспектах описанного машиночитаемого носителя носитель дополнительно содержит команды, которые при выполнении процессором заставляют процессор периодически обновлять визуализацию.
[0042] В данной заявке были описаны иллюстративные варианты реализации изобретения. Для ясности, в данном описании могут быть изложены не все особенности фактической реализации. Разумеется, следует иметь в виду, что при разработке любого такого фактического варианта реализации изобретения для достижения конкретных целей реализации могут быть приняты многочисленные специфичные для реализации решения, которые могут изменяться от одного варианта реализации изобретения к другому. Кроме того, следует иметь в виду, что такой процесс разработки может быть сложным и продолжительным, тем не менее, эта разработка будет рутинным мероприятием для специалистов в данной области техники, использующих преимущества ознакомления с данным описанием.
[0043] Термины «соединять» или «соединяет», применяемые в данной заявке, предназначены для обозначения либо косвенного, либо прямого соединения. Таким образом, если первое устройство соединено со вторым устройством, такое соединение может быть осуществлено через прямое соединение или через косвенное электрическое или механическое соединение посредством других устройств и соединений. Следует также понимать, что термины «буровое оборудование» или «буровая система» не ограничивают применение оборудования и способов, описанных с применением указанных терминов, только бурением нефтяной скважины. Указанные термины, как правило, также охватывают бурение скважин природного газа или углеводородных скважин. Кроме того, такие скважины могут быть использованы для добычи, наблюдения или закачивания применительно к извлечению углеводородов или других материалов из-под земли. Также это может быть применимо для (помимо углеводородных) геотермальных скважин, предназначенных для создания источника тепловой энергии.
[0044] Для облегчения понимания данного изобретения приводятся примеры некоторых из вариантов реализации изобретения. Данные примеры не следует воспринимать в качестве ограничения или определения объема изобретения. Варианты реализации данного изобретения могут быть применены для горизонтальных, вертикальных, отклоненных, многоствольных, соединяемых с помощью U-образных труб, пересекающихся, обходных (выбуриваемых около прихваченного на средней глубине скважинного инструмента, с врезанием в ствол скважины ниже) или других криволинейных стволов скважин в подземном пласте любого типа. Некоторые варианты могут быть применимы, например, для каротажных данных, полученных при кабельном, канатном каротаже и каротаже во время бурения/измерениях во время бурения (КВБ/ИВБ). Некоторые варианты реализации изобретения могут быть применимы для шельфовых и/или глубоководных скважин. Варианты реализации, описанные ранее относительно одного применения, не являются ограничивающими.
[0045] Следовательно, данное изобретение в значительной степени соответствует достижению описанных и свойственных результатов и преимуществ. Конкретные варианты реализации изобретения, описанные ранее, являются иллюстративными, так как данное изобретение может быть модифицировано и реализовано другими, но эквивалентными способами, понятными специалистам в данной области техники, у которых есть возможность ознакомиться с данным описанием. Кроме того, описанные в контексте данного изобретения подробности конструкции или дизайна не предполагают ограничения, за исключением описанных ниже в формуле изобретения. Таким образом, следует понимать, что конкретные иллюстративные варианты реализации изобретения, описанные ранее, могут быть изменены или модифицированы, при этом все такие изменения находятся в пределах объема и сущности данного изобретения. Кроме того, термины в формуле изобретения использованы в их простом, обычном значении, если обратное явным образом не указано заявителем.
Изобретение относится к направленному бурению скважин. В частности, предложена система скважинной дальнометрии, содержащая процессор, запоминающее устройство и модуль скважинной дальнометрии. Модуль скважинной дальнометрии выполнен с возможностью приема инклинометрической информации в ответ на сигнал инклинометрических измерений и определения местоположения в пласте первого ствола скважины. Модуль скважинной дальнометрии выполнен с дополнительной возможностью приема первой дальнометрической информации в ответ на первый дальнометрический сигнал и определения местоположения второго ствола скважины в пласте, а также погрешности местоположения второго ствола скважины, связанной с определением местоположения в пласте второго ствола скважины на основании первой дальнометрической информации. Модуль скважинной дальнометрии также выполнен с возможностью определения, используя местоположение первого ствола скважины, местоположение второго ствола скважины и погрешность местоположения второго ствола скважины, следующего местоположения для передачи второго дальнометрического сигнала. Предложенное изобретение обеспечивает более точную и сжатую визуализацию соответствующих местоположений и траекторий множества смежных стволов скважин. 3 н. и 39 з.п. ф-лы, 4 ил.
1. Система скважинной дальнометрии, содержащая:
процессор;
запоминающее устройство; и
модуль скважинной дальнометрии, выполненный с возможностью:
приема инклинометрической информации в ответ на сигнал инклинометрического измерения;
определения местоположения первого ствола скважины в пласте на основании инклинометрической информации;
приема первой дальнометрической информации в ответ на первый дальнометрический сигнал, переданный из первого ствола скважины на первой глубине в первом стволе скважины;
определения местоположения второго ствола скважины в пласте на основании первой дальнометрической информации;
определения погрешности местоположения второго ствола скважины, связанной с определением местоположения второго ствола скважины в пласте на основании первой дальнометрической информации; и
определения, используя местоположение первого ствола скважины, местоположение второго ствола скважины и погрешность местоположения второго ствола скважины, второй глубины в первом стволе скважины для передачи второго дальнометрического сигнала.
2. Система по п. 1, в которой местоположение второго ствола скважины дополнительно основывается на принятой инклинометрической информации, а также погрешность местоположения второго ствола скважины дополнительно основывается на принятой инклинометрической информации.
3. Система по п. 1, отличающаяся тем, что:
определенное местоположение первого ствола скважины содержит предыдущую траекторию первого ствола скважины в пласте; и
определенное местоположение второго ствола скважины содержит предыдущую траекторию второго ствола скважины в пласте.
4. Система по п. 3, в которой:
определенное местоположение второго ствола скважины дополнительно содержит последующую траекторию второго ствола скважины в пласте; и
модуль скважинной дальнометрии дополнительно выполнен с возможностью определения последующей траектории первого ствола скважины на основании местоположения первого ствола скважины в пласте и текущего угла отклонения первого ствола скважины.
5. Система по п. 4, в которой:
модуль скважинной дальнометрии дополнительно выполнен с возможностью определения погрешности местоположения первого ствола скважины, связанной с последующей траекторией первого ствола скважины; и
погрешность местоположения второго ствола скважины содержит первую часть и вторую часть, при этом первая часть связана с предыдущей траекторией второго ствола скважины, а вторая часть связана с последующей траекторией второго ствола скважины.
6. Система по п. 5, в которой модуль скважинной дальнометрии дополнительно выполнен с возможностью определения местоположения в пласте, в котором может произойти пересечение первого ствола скважины и второго ствола скважины, используя погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины.
7. Система по п. 5, в которой модуль скважинной дальнометрии дополнительно выполнен с возможностью определения погрешности местоположения первого ствола скважины и погрешности местоположения второго ствола скважины, используя модель на основе эллипса неопределенности Вольфа и де Вардта.
8. Система по п. 1, в которой модуль скважинной дальнометрии дополнительно выполнен с возможностью:
приема второй дальнометрической информации в ответ на второй дальнометрический сигнал, переданный из первого ствола скважины вблизи определенной второй глубины в первом стволе скважине;
обновления местоположения второго ствола скважины на основании первой дальнометрической информации;
обновления погрешности местоположения второго ствола скважины на основании первой дальнометрической информации; и
определения, используя обновленное местоположение первого ствола скважины, обновленное местоположения второго ствола скважины и обновленную погрешность местоположения второго ствола скважины, третьей глубины в первом стволе скважины для передачи третьего дальнометрического сигнала.
9. Система по любому из пп. 1-8, в которой модуль скважинной дальнометрии дополнительно выполнен с возможностью формирования одного или более предупредительных сигналов.
10. Система по любому из пп. 1-8, в которой модуль скважинной дальнометрии дополнительно выполнен с возможностью формирования трехмерной визуализации, содержащей определенные местоположения первого ствола скважины и второго ствола скважины.
11. Система по п. 10, в которой визуализация дополнительно содержит погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины.
12. Система по п. 10, в которой визуализация дополнительно содержит указатель оси.
13. Система по п. 10, в которой модуль скважинной дальнометрии дополнительно выполнен с возможностью изменения перспективного вида визуализации.
14. Система по п. 10, в которой модуль скважинной дальнометрии дополнительно выполнен с возможностью периодического обновления визуализации.
15. Способ определения местоположений, в которых выполняют дальнометрические замеры в стволе скважины, включающий этапы, в которых:
принимают инклинометрическую информацию в ответ на сигнал инклинометрических измерений;
определяют местоположение первого ствола скважины в пласте на основании инклинометрической информации;
принимают первую дальнометрическую информацию в ответ на первый дальнометрический сигнал, переданный из первого ствола скважины на первой глубине в первом стволе скважины;
определяют местоположение второго ствола скважины в пласте на основании первой дальнометрической информации;
определяют погрешность местоположения второго ствола скважины, связанную с определением местоположения второго ствола скважины в пласте на основании первой дальнометрической информации; и
определяют, используя местоположение первого ствола скважины, местоположение второго ствола скважины и погрешность местоположения второго ствола скважины, вторую глубину в первом стволе скважины для передачи второго дальнометрического сигнала.
16. Способ по п. 15, в котором местоположение второго ствола скважины дополнительно основывается на принятой инклинометрической информации, и погрешность местоположения второго ствола скважины дополнительно основывается на принятой инклинометрической информации.
17. Способ по п. 15, отличающийся тем, что:
определенное местоположение первого ствола скважины содержит предыдущую траекторию первой скважины в пласте; и
определенное местоположение второго ствола скважины содержит предыдущую траекторию второй скважины в пласте.
18. Способ по п. 17, в котором:
определенное местоположение второго ствола скважины дополнительно содержит последующую траекторию второго ствола скважины в пласте; и
указанный способ дополнительно включает этап, в котором определяют последующую траекторию первого ствола скважины на основании местоположения первой скважины в пласте и текущего угла отклонения первого ствола скважины.
19. Способ по п. 18, в котором:
указанный способ дополнительно включает этап, в котором определяют погрешность местоположения первого ствола скважины, связанную с последующей траекторией первого ствола скважины; и
погрешность местоположения второго ствола скважины содержит первую часть и вторую часть, при этом первая часть связана с предыдущей траекторией второго ствола скважины, и вторая часть связана с последующей траекторией второго ствола скважины.
20. Способ по п. 19, дополнительно включающий этап, в котором определяют местоположение, где может произойти пересечение первого ствола скважины и второго ствола скважины в пласте, используя погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины.
21. Способ по п. 19, дополнительно включающий этап, в котором определяют погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины, используя модель на основе эллипса неопределенности Вольфа и де Вардта.
22. Способ по п. 15, дополнительно включающий следующие этапы, в которых:
принимают вторую дальнометрическую информацию в ответ на второй дальнометрический сигнал, переданный из первого ствола скважины вблизи определенной второй глубины в первом стволе скважины;
обновляют местоположение второго ствола скважины на основании первой дальнометрической информации;
обновляют погрешность местоположения второго ствола скважины на основании первой дальнометрической информации; и
определяют, используя обновленное местоположение первого ствола скважины, обновленное местоположение второго ствола скважины и обновленную погрешность местоположения второго ствола скважины, третью глубину в первом стволе скважины для передачи третьего дальнометрического сигнала.
23. Способ по любому из пп. 15-22, дополнительно включающий этап, в котором формируют один или более предупредительных сигналов.
24. Способ по любому из пп. 15-22, дополнительно включающий этап, в котором формируют трехмерную визуализацию, содержащую определенные местоположения первого ствола скважины и второго ствола скважины.
25. Способ по п. 24, в котором визуализация дополнительно содержит погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины.
26. Способ по п. 24, в котором визуализация дополнительно содержит указатель оси.
27. Способ по п. 24, дополнительно включающий этап, в котором изменяют перспективный вид визуализации.
28. Способ по п. 24, дополнительно включающий этап, в котором периодически обновляют визуализацию.
29. Машиночитаемый носитель, содержащий команды, которые при выполнении процессором заставляют процессор:
принимать инклинометрическую информацию в ответ на сигнал инклинометрических измерений;
определять местоположение первого ствола скважины в пласте на основании инклинометрической информации;
принимать первую дальнометрическую информацию в ответ на первый дальнометрический сигнал, переданный из первого ствола скважины на первой глубине в первой скважине;
определять местоположение второго ствола скважины в пласте на основании первой дальнометрической информации;
определять погрешность местоположения второго ствола скважины, связанную с определением местоположения второго ствола скважины в пласте на основании первой дальнометрической информации; и
определять, используя местоположение первого ствола скважины, местоположение второго ствола скважины и погрешность местоположения второго ствола скважины, вторую глубину в первом стволе скважины для передачи второго дальнометрического сигнала.
30. Машиночитаемый носитель по п. 29, в котором местоположение второго ствола скважины дополнительно основывается на принятой инклинометрической информации, и погрешность местоположения второго ствола скважины дополнительно основывается на принятой инклинометрической информации.
31. Машиночитаемый носитель по п. 29, отличающийся тем, что:
определенное местоположение первого ствола скважины содержит предыдущую траекторию первой скважины в пласте; и
определенное местоположение второго ствола скважины содержит предыдущую траекторию второй скважины в пласте.
32. Машиночитаемый носитель по п. 31, в котором:
определенное местоположение второго ствола скважины дополнительно содержит последующую траекторию второго ствола скважины в пласте; и
носитель дополнительно содержит команды, которые при выполнении процессором заставляют процессор определять последующую траекторию первого ствола скважины на основании местоположения первого ствола скважины в пласте и текущего угла отклонения первого ствола скважины.
33. Машиночитаемый носитель по п. 32, в котором:
носитель дополнительно содержит команды, которые при выполнении процессором заставляют процессор определять погрешность местоположения первого ствола скважины, связанную с последующей траекторией первого ствола скважины; и
погрешность местоположения второго ствола скважины содержит первую часть и вторую часть, при этом первая часть связана с предыдущей траекторией второго ствола скважины, и вторая часть связана с последующей траекторией второго ствола скважины.
34. Машиночитаемый носитель по п. 33, дополнительно содержащий команды, которые при выполнении процессором заставляют процессор определять местоположение в пласте, используя погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины, в котором может произойти пересечение первого ствола скважины и второго ствола скважины.
35. Машиночитаемый носитель по п. 33, дополнительно содержащий команды, которые при выполнении процессором заставляют процессор определять погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины, используя модель на основе эллипса неопределенности Вольфа и де Вардта.
36. Машиночитаемый носитель по п. 29, дополнительно содержащий команды, которые при выполнении процессором заставляют процессор:
принимать вторую дальнометрическую информацию в ответ на второй дальнометрический сигнал, переданный из первого ствола скважины вблизи определенной второй глубины в первом стволе скважины;
обновлять местоположение второго ствола скважины, основываясь на первой дальнометрической информации;
обновлять погрешность местоположения второго ствола скважины на основании первой дальнометрической информации; и
определять, используя обновленное местоположение первого ствола скважины, обновленное местоположение второго ствола скважины и обновленную погрешность местоположения второго ствола скважины, третью глубину в первом стволе скважины для передачи третьего дальнометрического сигнала.
37. Машиночитаемый носитель по любому из пп. 29-36, дополнительно содержащий команды, которые при выполнении процессором заставляют процессор формировать предупреждающие сигналы.
38. Машиночитаемый носитель по любому из пп. 29-36, дополнительно содержащий команды, которые при выполнении процессором заставляют процессор создавать трехмерную визуализацию, содержащую определенные местоположения первого ствола скважины и второго ствола скважины.
39. Машиночитаемый носитель по п. 38, в котором визуализация дополнительно содержит погрешность местоположения первого ствола скважины и погрешность местоположения второго ствола скважины.
40. Машиночитаемый носитель по п. 38, в котором визуализация дополнительно содержит указатель оси.
41. Машиночитаемый носитель по п. 38, дополнительно содержащий команды, которые при выполнении процессором заставляют процессор изменять перспективный вид визуализации.
42. Машиночитаемый носитель по п. 38, дополнительно содержащий команды, которые при выполнении процессором заставляют процессор периодически обновлять визуализацию.
| WO 2014089402 A2, 12.06.2014 | |||
| Способ поиска ствола скважины на заданной глубине | 1985 |
|
SU1276795A1 |
| Способ определения расстояния между выработкой и скважиной | 1990 |
|
SU1774158A1 |
| ОПРЕДЕЛЕНИЕ РАССТОЯНИЯ МАГНИТНЫМИ СРЕДСТВАМИ ПРИ БУРЕНИИ ПАРАЛЛЕЛЬНЫХ СКВАЖИН | 2007 |
|
RU2436924C2 |
| US 20110133741 A1, 09.06.2011 | |||
| US 20080041626 A1, 21.02.2008 | |||
| WO 2010059263 A1, 27.05.2010. | |||

