ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к авиационной технике, в частности к средствам и способам для перемещения грузов и/или пассажиров по воздуху, воде и/или суше, а именно к транспортному средству, транспортной системе с таким транспортным средством и способу перемещения такого транспортного средства.
УРОВЕНЬ ТЕХНИКИ
В настоящее время широко распространены пилотируемые и беспилотные летательные аппараты с различными конструкциями и движителями, используемые в уровне техники для транспортировки грузов и/или пассажиров по воздуху, воде и/или суше. В частности, известны самолеты, вертолеты, планеры, аэростаты, легковые, автомобили, грузовики, мотоциклы, корабли, паромы, баржи, пароходы и иные виды воздушных, наземных или водных судов, которые способны осуществлять транспортировку грузов и/или пассажиров.
Преимуществами воздушного транспорта в сравнении с наземными и водными видами транспорта являются относительно более высокая скорость и отсутствие необходимости учета физических барьеров (реки, горы, леса, наземные строения и сооружения, трафик наземных транспортных средств, пешеходный трафик и т.п.) при построении маршрута следования такого транспортного средства. Однако, широкое применение воздушных транспортных средств имеет существенные ограничения в городских условиях. В частности, самолеты и вертолеты требуют строительства соответственно самолетных и вертолетных взлетно-посадочных площадок, которые занимают существенную площадь. Кроме того, габаритные размеры взлетно-посадочных площадок для воздушных транспортных средств существенно превышают габаритные размеры парковочных площадок, используемых для парковки наземных транспортных средств, способных перевозить соизмеримый по весу и объему груз и/или соизмеримое количество пассажиров. Например, минимальная площадь посадочной площадки для вертолета Ми-8, вмещающего до 24 пассажиров, составляет более 400 м2, а площадь парковки стандартного пассажирского автобуса с вместимостью 50-100 человек составляет менее 30 м2. Для вертолета Robinson R-44 с вместимостью до четырех человек (1 пилот и 3 пассажира) площадь посадочной площадки должна составлять не менее 225 м2, при этом площадь стандартного парковочного места для легкового автомобиля вместимостью до девяти человек составляет менее 14 м2.
Таким образом, для массового внедрения воздушного транспорта в городской среде совершенствование конструкций воздушных транспортных средств является актуальной задачей.
В патентной заявке США №20160272314 (далее US 20160272314), опубликованной 22 сентября 2016 года, описано транспортное средство в виде летающего автомобиля, содержащее фюзеляж, складные поворотные авиационные электродвигатели, обеспечивающие возможность вертикального взлета, и складные крылья. Транспортное средство согласно US 20160272314 в парковочном состоянии может иметь габаритные размеры, сопоставимые с обычным автомобилем. Однако, транспортное средство согласно US 20160272314 имеет ограниченную грузоподъемность и ограниченный запас хода, в связи с чем его конструкция не является универсальной и безопасной для применения указанного транспортное средство в городских условиях. В случае выхода из строя одного из авиационных двигателей в транспортном средстве согласно US 20160272314 не предусмотрена возможность осуществления безопасной посадки. Несмотря на то, что в US 20160272314 и указано, что транспортное средство согласно US 20160272314 может быть снабжено аварийным парашютом, возможность своевременного раскрытия парашюта и возможность обеспечения безопасной управляемой посадки такого транспортного средства вызывают сомнения, в особенности в пределах городской черты или в условиях плотной застройки.
Из патента США №9845150 (далее US 9845150), опубликованного 19 декабря 2017 года, известно транспортное средство, содержащее фюзеляж, на котором установлены горизонтально ориентированные несущие винты, вертикально ориентированные винты и складные крылья. Транспортное средство согласно US 9845150 выполнено с возможностью вертикального взлета аналогично вертолету с последующим раскладыванием крыльев и преобразованием в гибрид самолета и вертолета. Количество несущих винтов в транспортном средстве согласно US 9845150 может быть выбрано с запасом для обеспечения безопасной посадки в случае выхода из строя или поломки одного или нескольких из указанных несущих винтов. Горизонтально ориентированные несущие винты, установленные в транспортном средстве согласно US 9845150 вдоль фюзеляжа в несколько рядов, снижают габаритные размеры и повышают надежность такого транспортного средства в сравнении, например, с вертолетом, который обычно содержит всего один горизонтально ориентированный несущий винт, ометаемая площадь которого существенно превышает габаритные размеры фюзеляжа. Недостатками транспортного средства согласно US 9845150 являются ограниченный запас хода, а также ограниченная и не масштабируемая грузоподъемность.
В патенте США №10759286 (далее US 10759286), опубликованном 01 сентября 2020 года, который следует рассматривать в качестве наиболее близкого аналога (прототипа) настоящего изобретения, раскрыто транспортное средство, входящее в состав системы транспортировки пассажиров и содержащее фюзеляж, снабженный модулем стыковки, обеспечивающим возможность разъемной стыковки беспилотного летательного аппарата (несущего дрона) к фюзеляжу, который позволяет перемещать указанное транспортное средство по воздуху. Креме того, система транспортировки пассажиров, раскрытая в US 10759286, содержит специализированные аэровокзалы, приспособленные для приземления транспортных средств согласно US 10759286, зарядки несущих дронов, переподключения (замены) несущих дронов, посадки/высадки пассажиров и т.п. модуль стыковки в транспортном средстве согласно US 10759286 позволяет масштабировать грузоподъемность этого транспортного средства, в частности благодаря возможности разъемной стыковки несущих дронов с различной мощностью и грузоподъемностью к фюзеляжу этого транспортного средства. Однако транспортное средство согласно US 10759286 имеет ограниченный запас хода, что требует остановок на маршруте следования, которые по меньшей мере необходимы для осуществления отстыковки несущих дронов от фюзеляжа для их последующей зарядки и присоединения заряженных дронов к фюзеляжу, что в конечном итоге приводит повышению продолжительности рейса такого транспортного средства в соответствии с указанным маршрутом следования и, следовательно, отсрочивает момент прибытия такого транспортного средства в пункт назначения в соответствии с указанным маршрутом следования. Кроме того, выход из строя, поломка или преждевременная разрядка одного или более несущих дронов при перемещении транспортного средства согласно US 10759286 по маршруту следования может привести к падению этого транспортного средства на землю, так что транспортное средство согласно US 10759286 имеет повышенный уровень аварийности.
Таким образом, основной недостаток известных транспортных средств, в том числе транспортного средства согласно US 10759286, заключается в повышенном уровне аварийности и чрезмерной длительности перемещения до пункта назначения, в особенности при протяженном маршруте следования такого транспортного средства.
Таким образом, очевидна потребность в дальнейшем совершенствовании известных транспортных средств, в частности для снижения уровня аварийности таких транспортных средств и ускорения их прибытия в пункт назначения.
Следовательно, техническая проблема, решаемая настоящим изобретением, состоит в создании транспортного средства, в котором по меньшей мере частично устранен хотя бы один из обозначенных выше недостатков известного транспортного средства, заключающихся повышенном уровне аварийности и чрезмерной длительности перемещения до пункта назначения, ограниченной грузоподъемности и существенных габаритных размерах.
РАСКРЫТИЕ
Задача настоящего изобретения состоит в создании транспортного средства, решающего по меньшей мере одну из обозначенных выше проблем известного уровня техники, а также в расширении арсенала средств для транспортировки пассажиров и/или грузов.
Поставленная задача решена в первом аспекте настоящего изобретения благодаря тому, что предложенное транспортное средство содержит фюзеляж, снабженный одним или более модулями хранения, по меньшей мере в одном из которых размещены беспилотные летательные аппараты, и по меньшей мере одним модулем стыковки, выполненным каждый с возможностью разъемного взаимодействия по меньшей мере с одним из указанных беспилотных летательных аппаратов с обеспечением возможности его соединения с фюзеляжем для перемещения указанного транспортного средства, и
модуль управления, выполненный с возможностью выдачи управляющих команд по меньшей мере на один из указанных беспилотных летательных аппаратов с обеспечением возможности его выпуска из модуля хранения для взаимодействия с одним из указанных модулей стыковки.
Кроме того, поставленная задача решена во втором аспекте настоящего изобретения благодаря тому, что предложенная транспортная система содержит: (i) транспортное средство согласно первому аспекту настоящего изобретения; (ii) беспилотные летательные аппараты, используемые указанным транспортным средством; (iii) парковочные станции, выполненные с возможностью хранения дополнительных беспилотных летательных аппаратов; и (iv) сервер, выполненный с возможностью управления работой указанных дополнительных беспилотных летательных аппаратов на указанных парковочных станциях и соединенный с возможностью обмена данными с модулем управления транспортного средства с обеспечением возможности приема от него данных о маршруте следования транспортного средства; при этом модуль управления дополнительно выполнен с возможностью направления запроса по меньшей мере на одну из указанных парковочных станций, соответствующую указанному маршруту следования, для предоставления по меньшей мере одного дополнительного летательного аппарата в заданной географической области, соответствующей указанному маршруту следования, а
сервер дополнительно выполнен с возможностью приема координат транспортного средства от модуля управления в реальном времени с обеспечением возможности направления по меньшей мере одного дополнительного летательного аппарата из указанной парковочной станции в ответ на указанный запрос в момент времени, в который близость транспортного средства к указанной географической области в соответствии с указанным маршрутом следования соответствует пороговому значению, для взаимодействия указанного дополнительного летательного аппарата с модулем стыковки Кроме того, поставленная задача решена в третьем аспекте настоящего изобретения благодаря тому, что предложенная транспортная система содержит: (i) транспортные средства согласно первому аспекту настоящего изобретения; (ii) группы беспилотных летательных аппаратов, используемые каждая одним из указанных транспортных средств; (iii) сервер, соединенный с возможностью обмена данными с модулем управления каждого из указанных транспортных средств с обеспечением возможности приема от него данных о маршруте следования транспортного средства и возможности приема от него координат транспортного средства в реальном времени; при этом (a) каждый из беспилотных летательных аппаратов в каждом из указанных транспортных средств дополнительно выполнен с возможностью выдачи данных о запасе хода на модуль управления в ответ на запрос модуля управления, соответствующий указанному беспилотному летательному аппарату; (b) модуль управления в каждом из указанных транспортных средств дополнительно выполнен с возможностью определения количества свободных зарядных мест в модуле хранения указанного транспортного средства, в которых обеспечена возможность восполнения запаса хода беспилотных летательных аппаратов, с обеспечением возможности выдачи данных о свободных зарядных местах модуля хранения на сервер, установления количества разряженных беспилотных летательных аппаратов указанного транспортного средства, запас хода которых меньше порогового значения, на основании указанных данных о запасе хода, и выдачи запроса на сервер на предоставление дополнительных летательных аппаратов в количестве, соответствующем по меньшей мере части от указанного установленного количества разряженных беспилотных летательных аппаратов транспортного средства, а (c) сервер в ответ на указанный запрос на предоставление дополнительных летательных аппаратов дополнительно выполнен с возможностью установления другого транспортного средства из указанных транспортных средств, положение которого соответствует координатам указанного транспортного средства и в модуле хранения которого количество свободных зарядных мест соответствует количеству разряженных беспилотных летательных аппаратов указанного транспортного средства, или установления по меньшей мере двух других транспортных средств из указанных транспортных средств, положение каждого из которых соответствует координатам указанного транспортного средства и в модулях хранения которых суммарное количество свободных зарядных мест соответствует количеству разряженных беспилотных летательных аппаратов указанного транспортного средства, и дополнительно выполнен с возможностью выдачи управляющих инструкций на модуль управления указанного транспортного средства с обеспечением возможности направления указанных разряженных беспилотных летательных аппаратов под управлением модуля управления указанного транспортного средства к указанным свободным зарядным местам каждого установленного другого транспортного средства или перехвата управления указанными разряженными беспилотными летательными аппаратами с обеспечением возможности их направления к указанным свободным зарядным местам каждого установленного другого транспортного средства.
Кроме того, поставленная задача решена в четвертом аспекте настоящего изобретения благодаря тому, что предложенная транспортная система содержит: (i) транспортные средства согласно первому аспекту настоящего изобретения; (ii) группы беспилотных летательных аппаратов, используемые каждая одним из указанных транспортных средств; (iii) сервер, соединенный с возможностью обмена данными с модулем управления каждого из указанных транспортных средств с обеспечением возможности приема от него данных о маршруте следования транспортного средства, координат транспортного средства в реальном времени и данных о количестве незадействованных беспилотных летательных аппаратов транспортного средства в модуле хранения, которые не потребуются указанному транспортному средству при перемещении в соответствии со своим маршрутом следования; при этом (a) каждый из беспилотных летательных аппаратов в каждом из указанных транспортных средств дополнительно выполнен с возможностью выдачи данных о запасе хода на модуль управления в реальном времени; (b) модуль управления в каждом из указанных транспортных средств дополнительно выполнен с возможностью установления количества недостающих заряженных беспилотных летательных аппаратов из группы беспилотных летательных аппаратов транспортного средства, соответствующей указанному транспортному средству, для обеспечения запаса хода для указанного транспортного средства, позволяющего продолжить перемещение указанного транспортного средства до следующей остановки в соответствии с маршрутом следования транспортного средства, на основании данных о запасе хода, соответствующих указанному транспортному средству, и данных о целевом количестве заряженных беспилотных летательных аппаратов, позволяющем перемещать указанное транспортное средство между остановками в соответствии с его маршрутом следования, установления наличия свободных стыковочных мест в модуле стыковки указанного транспортного средства, в которых обеспечена возможность соединения беспилотных летательных аппаратов с фюзеляжем, в количестве, соответствующем указанному установленному количеству недостающих заряженных беспилотных летательных аппаратов, с обеспечением возможности выдачи данных о свободных стыковочных местах модуля стыковки на сервер, выдачи на сервер запроса на предоставление дополнительных летательных аппаратов в количестве, соответствующем по меньшей мере части от указанного установленного количества недостающих заряженных беспилотных летательных аппаратов; а (c) сервер в ответ на указанный запрос на предоставление дополнительных летательных аппаратов дополнительно выполнен с возможностью установления другого транспортного средства из указанных транспортных средств, положение которого соответствует координатам указанного транспортного средства и количество незадействованных беспилотных летательных аппаратов которого соответствует указанному количеству недостающих заряженных беспилотных летательных аппаратов, или установления по меньшей мере двух других транспортных средств из указанных транспортных средств, положение каждого из которых соответствует координатам указанного транспортного средства и суммарное количество незадействованных беспилотных летательных аппаратов которых соответствует указанному количеству недостающих заряженных беспилотных летательных аппаратов, и дополнительно выполнен с возможностью выдачи управляющих инструкций на модуль управления каждого установленного другого транспортного средства с обеспечением возможности направления каждого из незадействованных беспилотных летательных аппаратов под управлением модуля управления указанного другого транспортного средства к одному из указанных свободных стыковочных мест в модуле стыковки или перехвата управления незадействованными беспилотными летательными аппаратами с обеспечением возможности направления каждого из них к одному из указанных свободных стыковочных мест в модуле стыковки.
Кроме того, поставленная задача решена в пятом аспекте настоящего изобретения благодаря тому, что предложенная транспортная система содержит: (i) транспортное средство согласно первому аспекту настоящего изобретения, дополнительно снабженное модулем определения местоположения, выполненным с возможностью определения географических координат транспортного средства в реальном времени; (ii) беспилотные летательные аппараты, используемые указанным транспортным средством; и (iii) парковочные станции, каждая из которых выполнена с возможностью хранения дополнительных беспилотных летательных аппаратов и с возможностью управления работой указанных дополнительных беспилотных летательных аппаратов, причем указанные парковочные станции дополнительно выполнены с возможностью обмена данными с модулем управления транспортного средства с обеспечением возможности приема от него данных о маршруте следования транспортного средства; при этом модуль управления дополнительно выполнен с возможностью направления запроса по меньшей мере на одну из указанных парковочных станций для предоставления по меньшей мере одного дополнительного беспилотного летательного аппарата в географической области, соответствующей указанному маршруту следования, а указанная по меньшей мере одна парковочная станция в ответ на указанный запрос обеспечивает возможность направления указанного по меньшей мере одного дополнительного летательного аппарата в момент времени, в который близость транспортного средства к указанной географической области в соответствии с указанным маршрутом следования соответствует пороговому значению, для взаимодействия каждого из указанных дополнительных летательных аппаратов с модулем стыковки транспортного средства.
Кроме того, поставленная задача решена в шестом аспекте настоящего изобретения благодаря тому, что предложенная транспортная система содержит: (i) транспортное средство согласно первому аспекту настоящего изобретения; (ii) беспилотные летательные аппараты, используемые указанным транспортным средством; (iii) парковочные станции, выполненные с возможностью хранения дополнительных беспилотных летательных аппаратов; и (iv) сервер, выполненный с возможностью управления работой указанных дополнительных беспилотных летательных аппаратов на указанных парковочных станциях и соединенный с возможностью обмена данными с модулем управления транспортного средства; при этом модуль управления дополнительно выполнен с возможностью направления запроса на сервер для предоставления по меньшей мере одного дополнительного летательного аппарата, а сервер дополнительно выполнен с возможностью выявления по меньшей мере одной из указанных парковочных станций, соответствующей указанному запросу, с обеспечением возможности направления по меньшей мере одного дополнительного летательного аппарата из указанных выявленных парковочных станций в момент времени, в который близость транспортного средства к указанным выявленным парковочным станциям соответствует пороговому значению, для взаимодействия каждого из указанных дополнительных летательных аппаратов с модулем стыковки транспортного средства.
Кроме того, поставленная задача решена в седьмом аспекте настоящего изобретения благодаря тому, что предложенная транспортная система содержит: (i) транспортное средство согласно первому аспекту настоящего изобретения; (ii) беспилотные летательные аппараты, используемые указанным транспортным средством; и (iii) парковочные станции, каждая из которых выполнена с возможностью хранения дополнительных беспилотных летательных аппаратов и с возможностью управления работой указанных дополнительных беспилотных летательных аппаратов, причем указанные парковочные станции дополнительно выполнены с возможностью обмена данными с модулем управления транспортного средства; при этом модуль управления дополнительно выполнен с возможностью направления запроса по меньшей мере на одну из указанных парковочных станций для предоставления по меньшей мере одного дополнительного беспилотного летательного аппарата, а указанная по меньшей мере одна парковочная станция дополнительно в ответ на указанный запрос обеспечивает возможность направления указанного по меньшей мере одного дополнительного летательного аппарата в момент времени, в который близость транспортного средства к этой парковочной станции соответствует пороговому значению, для взаимодействия каждого из указанных дополнительных летательных аппаратов с модулем стыковки транспортного средства.
Кроме того, поставленная задача решена в восьмом аспекте настоящего изобретения благодаря тому, что предложенный способ перемещения транспортного средства согласно первому аспекту настоящего изобретения включает этапы, согласно которым: (i) выдают управляющие команды на беспилотные летательные аппараты; (ii) направляют указанные беспилотные летательные аппараты к модулю стыковки транспортного средства с обеспечением взаимодействия с ним для присоединения указанных направленных беспилотных летательных аппаратов к фюзеляжу транспортного средства; и (iii) приводят в действие, посредством модуля управления транспортного средства, указанные присоединенные беспилотные летательные аппараты с обеспечением перемещения транспортного средства.
Транспортное средство согласно первому аспекту настоящего изобретения, транспортная система согласно второму аспекту настоящего изобретения, транспортная система согласно третьему аспекту настоящего изобретения, транспортная система согласно четвертому аспекту настоящего изобретения и способ перемещения транспортного средства согласно пятому аспекту настоящего изобретения обеспечивают каждый технический результат, заключающийся в повышении безопасности эксплуатации транспортного средства. Транспортное средство согласно первому аспекту настоящего изобретения, транспортная система согласно второму аспекту настоящего изобретения, транспортная система согласно третьему аспекту настоящего изобретения, транспортная система согласно четвертому аспекту настоящего изобретения, транспортная система согласно пятому аспекту настоящего изобретения, транспортная система согласно шестому аспекту настоящего изобретения, транспортная система согласно седьмому аспекту настоящего изобретения и способ перемещения транспортного средства согласно восьмому аспекту настоящего изобретения обеспечивают каждый дополнительный технический результат, заключающийся в повышении использования транспортного средства для доставки груза и/или пассажира в пункт назначения, в частности за счет возможности беспосадочного перемещения транспортного средства до пункта назначения.
Транспортное средство согласно первому аспекту настоящего изобретения, транспортная система согласно второму аспекту настоящего изобретения, транспортная система согласно третьему аспекту настоящего изобретения, транспортная система согласно четвертому аспекту настоящего изобретения, транспортная система согласно пятому аспекту настоящего изобретения, транспортная система согласно шестому аспекту настоящего изобретения, транспортная система согласно седьмому аспекту настоящего изобретения и способ перемещения транспортного средства согласно восьмому аспекту настоящего изобретения обеспечивают каждый еще один дополнительный технический результат, заключающийся в расширении арсенала средств для транспортировки полезной нагрузки (например, грузов и/или пассажиров).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые приведены для обеспечения лучшего понимания сущности настоящего изобретения, составляют часть настоящего документа и включены в него для иллюстрации нижеописанных вариантов реализации и аспектов настоящем изобретении. Прилагаемые чертежи в сочетании с приведенным ниже описанием служат для пояснения сущности настоящего изобретения. На чертежах:
на фиг. 1 схематично показан вид сбоку первого иллюстративного варианта реализации транспортного средства согласно настоящему изобретению;
на фиг. 2 схематично показан вид сбоку второго иллюстративного варианта реализации транспортного средства согласно настоящему изобретению;
на фиг. 3a схематично показан вид сбоку третьего иллюстративного варианта реализации транспортного средства согласно настоящему изобретению с модулем стыковки в сложенном состоянии;
на фиг. 3b схематично показан вид сбоку третьего иллюстративного варианта реализации транспортного средства согласно настоящему изобретению с модулем стыковки в развернутом состоянии;
на фиг. 4 схематично показан вид сбоку четвертого иллюстративного варианта реализации транспортного средства согласно настоящему изобретению;
на фиг. 5 показана структурная схема транспортной системы, в состав которой входит транспортное средство согласно любому из вариантов реализации настоящего изобретения; и
на фиг. 6 показан один из вариантов реализации способа перемещения транспортного средства.
ОСУЩЕСТВЛЕНИЕ
Ниже со ссылкой на прилагаемые чертежи описаны некоторые примеры возможных вариантов реализации настоящего изобретения, при этом не следует считать, что приведенное ниже описание определяет или ограничивает объем настоящего изобретения.
В приведенном ниже описании хорошо известные функции или конструкции не описаны подробно, поскольку это может завуалировать неважными сведениями сущность настоящего изобретения.
Следует понимать, что в приведенном далее описании термины, такие как «первый», «второй», «верхний», «нижний», «боковой», «передний», «задний» и т.п., использованы исключительно для удобства, при этом их не следует толковать как ограничительные термины. В частности, в контексте настоящего изобретения, если в описании настоящего документа явно не указано иное, термины «первый», «второй», «третий» или т.п. использованы для того, чтобы отличать друг от друга элементы, компоненты, части, узлы, модули, блоки, варианты реализации или т.п., к которым они относятся, а не для целей описания какой-либо конкретной взаимосвязи между ними. Так, например, следует иметь в виду, что использование терминов «первая группа» беспилотных летательных аппаратов и «вторая группа» беспилотных летательных аппаратов не подразумевает какого-либо порядка, отнесения к определенному типу, хронологии, иерархии или ранжирования групп беспилотных летательных аппаратов во множестве беспилотных летательных аппаратов, равно как и их использование (само по себе) не исключает, что дополнительно могут существовать «третья группа» беспилотных летательных аппаратов, «четвертая группа» беспилотных летательных аппаратов и т.п. В дальнейшем, как указано здесь в других контекстах, упоминание «первой группы» и «второй группы» в настоящей документы не исключает возможности того, что в состав этих групп входят одинаковые элементы. Так, например, в некоторых случаях беспилотные летательные аппараты в «первой группе» беспилотных летательных аппаратов и «второй группе» беспилотных летательных аппаратов могут совпадать по конструкции, а в других случаях могут и отличаться по конструкции.
Следует понимать при упоминании объекта в единственном числе возможно и наличие множества таких объектов и наоборот, если явно не указано иное или иное явным образом не следует из контекста.
Грамматические связи выражают любые или все альтернативные и объединенные сочетания связанных пунктов, предложений, слов и т.п., если только явно не указано иное или иное явным образом не следует из контекста. Таким образом следует понимать, что термин «или» в целом означает «и/или» и т.п.
Перечисление диапазонов значений в данном документе не является ограничением, поскольку ссылается в индивидуальном порядке на любые или все значения, попадающие в диапазон, если иное не указано в данном документе, при этом каждое отдельное значение в таком диапазоне включено в описание так, как если бы оно было отдельно приведено в данном документе.
Слова «приблизительно», «примерно» или т.п. в сочетании с числовым значением следует толковать как указывающие на возможное отклонение, которое по мнению специалиста в области техники обеспечивало бы надлежащее функционирование для решения необходимой задачи. Диапазоны значений и/или числовые значения приведены в данном документе исключительно в качестве примеров и не ограничивают объем описанных вариантов реализации.
Все примеры, приведенные в данном документе, или по меньшей мере часть из них, равно как и соответствующие слововыражения («например», «такой как», «в частности» или т.п.), по существу использованы для улучшения понимания сущности настоящего изобретения и обеспечения полноты раскрытия настоящего изобретения, однако эти слововыражения не накладывают каких-либо ограничений на варианты реализации настоящего изобретения, для описания которых они использованы в настоящем документе, в частности не ограничивают практические варианты реализации элементов, компонентов, частей, узлов, модулей, блоков, устройств, средств и/или т.п., используемых для раскрытия особенностей конструкции и функционирования настоящего изобретения.
В описании данного документа применены следующие термины и определения.
Термин «иллюстративный» означает неограничивающий пример, вариант или иллюстрацию. Аналогичным образом, термины «например» и «в качестве примера», использованные в данном документе, задают перечни из одного или более неограничивающих примеров, вариантов или иллюстраций. Как использовано в данном документе, схема «выполнена с возможностью» осуществлять функцию во всех случаях, когда эта схема содержит необходимые аппаратные средства и код (если какой-либо код необходим) для осуществления функции независимо от того, является ли исполнение этой функции заблокированным или запрещенным (например, посредством заданной оператором настройки, заводской настройки и т.п.).
В контексте настоящего изобретения термин «соответствие» и его производные (т.е. прилагательное, глагол, наречие) не обязательно означает точную согласованность или точное равенство в чем-либо, чему-либо или между чем-либо в каком-либо отношении, а может подразумевать отхождение или отклонение от указанного равенства в заданных пределах. Например, термин «соответствующие координаты», если из описания настоящего документа явно не следует иное, означает не только, что эти координаты могут быть точно равны друг другу или могут точно совпадать, но и подразумевает, что указанное равенство или совпадение координат может быть установлено с некоторой погрешностью (например, с погрешностью работы GPS-системы) или в рамках заданной географической области, окружающей точную географическую точку или область, на которую указывают эти координаты, или точное географическое место, на которое указывают эти координаты.
В контексте настоящего изобретения термин «беспилотный летательный аппарат» (БПЛА), если из описания настоящего документа явно не следует иное, относится к беспилотной машине или беспилотному транспортному средству, которое выполнено с возможностью полета или которое способно осуществлять перемещение по воздуху в автоматическом режиме, т.е. без участия человека или внешних источников управления, или способно осуществлять перемещение по воздуху в полуавтоматическом режиме, т.е. получать по меньшей мере часть управляющих команд от человека (например, пилота, оператора и т.п.) или внешнего источника (например, сервера управления) по заданным каналам связи. Неограничивающими примерами БПЛА являются различные мультироторные БПЛА (например, мультикоптерные дроны), однороторные БПЛА (например, беспилотный вертолет), гибридные БПЛА (например, дроны с роторами и крыльями) и т.п.
В контексте настоящего изобретения термин «фюзеляж», если из описания настоящего документа явно не следует иное, относится к корпусу транспортного средства, при этом тип, форма, габаритные размеры, конструктивные особенности и материал такого корпуса никак конкретно не ограничены.
В контексте настоящего изобретения термин «модуль», если из описания настоящего документа явно не следует иное, относится к функциональному элементу или совокупности функциональных элементов устройства в виде детали, узла, блока или др. сборочной единицы, которая выполняет определенные технические функции, обеспечивающие выполнение функций устройства. Модуль в целом может быть реализован на практике с использованием сочетания известных конструктивных элементов, сочетания известных конструктивных элементов и известных аппаратных средств, сочетания известных конструктивных элементов и известных программно-аппаратных средств или сочетания известных аппаратных средств и известных программных средств. Так, например, модуль стыковки выполнен с возможностью разъемного взаимодействия по меньшей мере с одним беспилотным летательным аппаратам, при этом модуль стыковки может быть реализован с использованием сочетания известных конструктивных элементов, сочетания известных конструктивных элементов и аппаратных средств, сочетания конструктивных элементов и программно-аппаратных средств или сочетания аппаратных средств и программных средств. Модуль управления может быть реализован с использованием программно-аппаратных средств. Модуль хранения для хранения беспилотных летательных аппаратов обеспечивает возможность размещения беспилотных летательных аппаратов внутри него и/или на фюзеляже и может быть реализован с использованием сочетания известных конструктивных элементов, сочетания известных конструктивных элементов и аппаратных средств, сочетания конструктивных элементов и программно-аппаратных средств или сочетания аппаратных средств и программных средств. В контексте настоящего изобретения модуль управления может представлять собой физическое устройство, аппарат или множеством модулей, выполненных с использованием аппаратного обеспечения, например, с помощью, интегральной схемы специального назначения (ASIC) или программируемой логической интегральной схемы (FPGA), или же комбинации аппаратного и программного обеспечения, например, с помощью микропроцессорной системы и набора инструкций, реализующих функциональные возможности модуля управления, которые (при выполнении) трансформируют микропроцессорную систему в устройство или систему специального назначения (например, автопилот). Кроме того, каждый из модулей или по меньшей мере один из них также может быть реализован в виде комбинации аппаратного и программного обеспечения, при этом одни функциональные возможности, описанные в настоящем документе в отношении одного из модулей, могут быть реализованы только за счет аппаратного обеспечения, а другие функциональные возможности, описанные в настоящем документе в отношении того же самого модуля или иного модуля, могут быть реализованы путем аппаратного обеспечением в сочетании с программным обеспечением.
В контексте настоящего изобретения термин «навигационная команда», если из описания настоящего документа явно не следует иное, относится к инструкции для направления транспортного средства. Навигационные команды могут быть представлены или обеспечены системой управления полетом как цифровые или аналоговые данные инструкций или сигналы. Навигационные команды могут быть первоначально сгенерированы, без ограничения, автопилотом, пилотом (как локально, так и удаленно) и/или системой обхода препятствий. Навигационные команды могут быть сообщены, например, модулю управления или системе управления направлением перемещения.
В контексте настоящего изобретения термин «ручное управление», если из описания настоящего документа явно не следует иное, относится не только к управлению исключительно с помощью рук человека, но и с помощью ног, пальцев, голоса, зрачков человека или их любого подходящего сочетания. Таким образом, в контексте настоящего изобретения термин «орган ручного управления» относится по меньшей мере к одному из следующего: кнопки, рычаги, джойстики, тумблеры, педали, сенсорный экран, сенсоры для управления жестами, сканеры для отслеживания движения зрачков, микрофон и т.п.
В контексте настоящего изобретения термин «зарядное устройство», если из описания настоящего документа явно не следует иное, относится к устройству для восполнения запаса хода транспортного средства или беспилотного летательного аппарата путем подзарядки его аккумуляторной батареи и/или путем восполнения его запаса топлива.
В контексте настоящего изобретения термин «база данных», если из описания настоящего документа явно не следует иное, подразумевает под собой любой структурированный набор данных, не зависящий от конкретной структуры, программного обеспечения по управлению базой данных, аппаратного обеспечения компьютера, на котором данные хранятся, используются или иным образом оказываются доступны для использования. База данных может находиться на том же оборудовании, выполняющем процесс, который сохраняет или использует информацию, хранящуюся в базе данных, или же она может находиться на отдельном оборудовании, например, выделенном сервере или множестве серверов.
В контексте настоящего изобретения термин «стопа», если из описания настоящего документа явно не следует иное, означает ряд предметов, уложенных один на другой. В частности, термин «стопа беспилотных летательных аппаратов» относится к совокупности беспилотных летательных аппаратов разного или одинакового размера, уложенных друг на друга по вертикали по одному или партиями.
В контексте настоящего изобретения термин «стыковочное место», если из описания настоящего документа явно не следует иное, означает участок поверхности или область пространства, в которой осуществляется сцепление беспилотного летательного аппарата с тяговым сцепным элементом.
В контексте настоящего изобретения термин «парковочная станция», если из описания настоящего документа явно не следует иное, означает неподвижную или подвижную конструкцию, приспособленную для размещения в ней беспилотных летательных аппаратов и/или транспортных средств.
В контексте настоящего изобретения термин «сервер» относится к вычислительному оборудованию, исполняющему компьютерную программу для обеспечения возможности получения запросов (например, от других вычислительных устройств) по сети связи, возможности выполнения или обработки таких запросов и/или возможности отправки таких запросов по сети связи (например, на другие вычислительные устройства). Вычислительное оборудование, исполняющее компьютерную программу, может представлять собой, без ограничения, один физический компьютер или одну физическую компьютерную систему. В контексте настоящего изобретения использование термина «сервер» не означает, что каждая вычислительная задача (например, полученные инструкции или команды) или любая иная конкретная задача будут получены, выполнены или послужат причиной выполнения одним и тем же сервером (т.е. одним и тем же программным и/или аппаратным обеспечением), что означает, что любое количество элементов программного обеспечения или аппаратного обеспечения может быть вовлечено в получение/отправку, выполнение или может послужить причиной для выполнения любой задачи или запроса, или последствий любой задачи или запроса, при этом все это программное и аппаратное обеспечение может быть реализовано в виде одного или нескольких серверов.
Транспортное устройство
На фиг. 1-4 схематично показаны виды сбоку иллюстративных вариантов реализации транспортного средства согласно настоящему изобретению. Следует отметить, что транспортное средство 100-1, показанное на фиг. 1, транспортное средство 100-2, показанное на фиг. 2, транспортное средство 100-3, показанное на фиг. 3a и 3b, и транспортное средство 100-4, показанное на фиг. 4, в целом имеют схожее или аналогичное конструктивное исполнение, в связи с чем схожие или идентичные конструктивные/функциональные элементы, входящие в состав этих транспортных средств 100-1, 100-2, 100-3, 100-4, обозначены соответственно на фиг. 1, 2, 3a и 3b, 4 с использованием одних и тех же ссылочных номеров. Для удобства повествования транспортные средства 100-1, 100-2, 100-3, 100-4, показанные соответственно на фиг. 1, 2, 3a и 3b, 4, обозначены ниже использованием ссылочного номера (100).
Как показано на фиг. 1-4, транспортное средство 100 содержит корпус, кузов или фюзеляж 102 любого типа, который может иметь любые подходящие форму и габаритные размеры, которые придают в уровне техники любому известному транспортному средству, и который может быть выполнен из любого подходящего материала, известного в уровне техники и используемого для изготовления корпуса транспортного средства. Таким образом, тип, форма, габаритные размеры и материал фюзеляжа 102 в транспортном средстве 100 никак конкретно не ограничены в рамках настоящего изобретения. Фюзеляж 102, показанный на фиг. 1-4, имеет форму, схожую с корпусом вертолета, однако специалисту в данной области техники должно быть очевидно, что фюзеляж 102 может иметь любую другую форму, похожую на любое другое транспортное средство, например на самолет, шаттл, легковой автомобиль, грузовик, автобус, мотоцикл, катер, корабль, вагон, локомотив или любое другое транспортное средство, известное в уровне техники.
Фюзеляжа 102 может содержать каркас или несущую раму, на которой закреплена обшивка, в которой могут быть выполнены различные дверные проемы, иллюминаторы и т.п. и который может быть дополнительно снабжен оперением, крылом, крыльями, винтом, силовой установкой и/или т.п. в зависимости от конкретного варианта исполнения фюзеляжа 102.
Фюзеляж 102, показанный на фиг. 1-4, может быть выполнен из металла, пластика, композитного материала (например, из композитных сэндвич-панелей), алюминиевого материала (например, из алюминиевых сэндвич-панелей), титанового материала (например, из сэндвич-панелей из титана) или любого иного подходящего материала, известного в уровне техники, в том числе с использованием любого подходящего сочетания перечисленных материалов (например, сэндвич панель из титана с алюминиевым сотовым сердечником). Материал изготовления фюзеляжа 102 в транспортном средстве 100 никак конкретно не ограничен в настоящем изобретении.
В одном из вариантов реализации настоящего изобретения фюзеляж 102 может представлять собой экзоскелет или иную несущую конструкцию, которая может быть прикреплена по меньшей мере к одному из пилота, пассажира и предмета груза или надета по меньшей мере на одного из них.
Как показано на фиг. 1-4, фюзеляж 102 также снабжен шасси 116, которое по сути представляет собой систему опор, необходимую по меньшей мере для взлета, посадки и стоянки транспортного средства на земле, палубе, воде или поверхности иного физического объекта. Шасси 116 может иметь полозковый тип (см. фиг. 1, 4), колесный тип (см. фиг. 2) или поплавковый тип (см. фиг. 3a-3b). Кроме того, шасси 116 могут иметь тип лодки или любой другой тип, известный в уровне техники. Тип, форма, габаритные размеры и материал шасси 116 в транспортном средстве 100 никак конкретно не ограничены в рамках настоящего изобретения.
Следует отметить, что шасси 116 в зависимости от его конкретного варианта исполнения по сути может обеспечивать (i) управляемость транспортного средства 100 при разбеге, пробеге, рулении, разворотах, буксировке, маневрировании по взлетно-посадочной полосе; (ii) восприятие статического нагружения от веса при стоянке транспортного средства 100; (iii) амортизацию динамических нагрузок, возникающих при посадке транспортного средства 100 (в том числе аварийной), рулении и разбеге; (iv) поглощение поступательной энергии торможения транспортного средства 100 при маневрировании и торможение при стоянке; и/или (v) уборку, выпуск и фиксацию выпущенного или убранного положения в полете.
В одном из вариантов реализации настоящего изобретения транспортное средство 100 может и не быть снабжено шасси 116 вообще. В одной из разновидностей такого варианта реализации настоящего изобретения днище фюзеляжа 102 может быть снабжено амортизирующей подложкой (не показана) из упругого материала (например, из резины), которая может быть скреплена с указанным днищем с его наружной стороны.
В другом варианте реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен по меньшей мере одним крылом (не показано), которое может быть выполнено за одно целом с фюзеляжем 102, может быть прикреплено к фюзеляжу 102 с его наружной стороны или по меньшей мере частично вделано или встроено в фюзеляж 102, при этом указанное крыло может первоначально находиться в сложенном состоянии или задвинутом состоянии (исходное положение) и может быть выполнено с возможностью его развертывания соответственно в разложенное или выдвинутое состояние (рабочее положение) под управлением нижеописанного модуля управления транспортного средства 100. Следует отметить, что количество крыльев, которыми может быть снабжен фюзеляж 102, может быть подобрано с учетом массогабаритных показателей и конструкционных особенностей фюзеляжа 102 для создания дополнительной подъемной силы в полете и снижения нагрузки на нижеописанные беспилотные летательные аппараты 200, используемые для перемещения транспортного средства 100 по воздуху, суше и/или воде. Следует также отметить, что по меньшей мере одно из крыльев, которыми может быть снабжен фюзеляж 102, может быть выполнено складным, телескопическим, выдвижным или т.п. для снижения габаритных размеров транспортного средства 100 в парковочном положении, при этом развертывание указанного крыла может осуществляться под управлением нижеописанного модуля управления транспортного средства 100 при взлете транспортного средства 100 или в процессе перемещения транспортного средства 100.
В ином варианте реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен крыльями для создания дополнительной подъемной силы в полете и по меньшей мере одним авиационным двигателем (не показан), а предпочтительно двумя авиационными двигателями, для обеспечения возможности перемещения транспортного средства 100 по воздуху (в том числе в аварийной ситуации, например в случае повреждения, выхода из строя и/или полной разрядки большей части нижеописанных беспилотных летательных аппаратов, используемых для перемещения транспортного средства 100 по воздуху) или повышения скорости перемещения транспортного средства 100 по воздуху (т.е. обеспечение возможности работы авиационных двигателей в дополнение к нижеописанным беспилотным летательным аппаратам, используемым для перемещения транспортного средства 100 по воздуху в стандартной ситуации). Следует отметить, что в качестве каждого такого авиационного двигателя может быть использован, например, винтовой двигатель, реактивный двигатель, комбинированный авиационный двигатель или любой другой подходящий авиационный двигатель, известный в уровне техники. Следует также отметить, что в случае использования в транспортном средстве 100 двух авиационных двигателей их конструкции и/или типы могут совпадать или отличаться друг от друга. Каждый такой авиационный двигатель, которым может быть дополнительно снабжен фюзеляж 102 в транспортном средстве 100, может работать под управлением нижеописанного модуля управления, который может выдавать управляющие команды на драйвер управления двигателем с обеспечением возможности запуска, остановки или изменения режима работы указанного двигателя (изменение рабочих параметров двигателя).
В некотором другом варианте реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен по меньшей мере одним несущим винтом (не показан) или винтовым движителем любого иного типа, известного в уровне техники, для обеспечения возможности перемещения транспортного средства 100 по воздуху (в том числе в аварийной ситуации, например в случае повреждения, выхода из строя и/или полной разрядки большей части нижеописанных беспилотных летательных аппаратов, используемых для перемещения транспортного средства 100 по воздуху) или повышения скорости перемещения транспортного средства 100 по воздуху (т.е. обеспечение возможности работы несущего винта или винтового движителя в дополнение к нижеописанным беспилотным летательным аппаратам, используемым для перемещения транспортного средства 100 по воздуху в стандартной ситуации). Кроме того, в данном варианте реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может дополнительно содержать силовую установку (не показана), которая может быть образована, например, из одного или двух турбовальных двигателей и которая может быть функционально соединена с каждым из несущих винтов транспортного средства 100 с обеспечением возможности подачи на них мощности для приведения их в действие. Каждая такая силовая установка транспортного средства 100, функционально соединенная с несущими винтами, которыми может быть дополнительно снабжен фюзеляж 102, с обеспечением передачи на них приводного усилия, может работать под управлением нижеописанного модуля управления, который может выдавать управляющие команды на драйвер управления силовой установкой с обеспечением возможности запуска, остановки или изменения режима работы указанной силовой установки (изменение рабочих параметров силовой установки), с обеспечением возможности изменения состояния этих несущих винтов.
В некотором ином варианте реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен по меньшей мере одним движителем любого типа, известного в уровне техники, для обеспечения возможности перемещения транспортного средства 100 по воздуху, суше и/или воде в зависимости от конкретного варианта исполнения транспортного средства 100. В частности, фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен активным движителем (например, парусом для создания движущей силы за счет энергии ветра), реактивным движителем, в том числе гидро-реактивным движителем для создания движущей силы за счет реакции отбрасываемых назад масс воды (например, автоматизированным гребным веслом, гребным колесом, гребным винтом, крыльчатым или водометным движителем) или воздушно-реактивным движителем для создания движущей силы за счет реакции отбрасываемых назад воздушных масс (например, воздушным винтом), или любым другим подходящим движителем, известным в уровне техники.
В некоторых вариантах реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен колесами (не показаны), которые могут быть установлены со стороны днища фюзеляжа 102, и силовой установкой, образованной из одного или более двигателей и функционально соединенной по меньшей мере с одним из указанных колес с обеспечением возможности его привода для перемещения транспортного средства 100 по поверхности земли или поверхности иного наземного объекта (например, по дороге, взлетно-посадочной полосе или т.п.), при этом в качестве каждого из указанных двигателей, образующих силовую установку, может быть использован, например, двигатель внутреннего сгорания или электродвигатель, питаемый от источника питания (например, аккумуляторной батареи), размещенного в фюзеляже 102. В таких вариантах реализации настоящего изобретения силовая установка транспортного средства 100, функционально соединенная с колесами, которыми может быть дополнительно снабжен фюзеляж 102, с обеспечением передачи на них приводного усилия, может работать под управлением нижеописанного модуля управления, который может выдавать управляющие команды на драйвер управления силовой установкой с обеспечением возможности запуска, остановки или изменения режима работы указанной силовой установки (изменение рабочих параметров силовой установки) с обеспечением возможности изменения состояния этих колес.
В других вариантах реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен датчиками (не показаны) для измерения параметров полета транспортного средства 100, а модуль управления (не показан) может быть соединен с возможностью обмена данными с указанными измерительными датчиками и с внешним источником управления (например, с сервером 300) с обеспечением возможности выдачи указанных измеренных параметров полета транспортного средства на внешний источник управления и дополнительно выполнен с возможностью приема от внешнего источника управления управляющих инструкций в ответ на указанные параметры полета транспортного средства с обеспечением возможности генерирования и выдачи своих управляющих команд с учетом указанных управляющих инструкций от внешнего источника управления. Следует отметить, что в качестве датчиков для измерения параметров полета транспортного средства 100 могут быть использованы, например, барометрические высотометры, индикаторы воздушной скорости и числа Маха, вариометры, приемники воздушного давления, централизованные системы воздушных сигналов, манометры, тахометры, термометры, системы управления движителями, авиагоризонты, курсовые приборы и автоматы углов атаки и сигнализации перегрузок.
В иных вариантах реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен датчиками для измерения параметров состояния фюзеляжа транспортного средства 100, а модуль управления может быть соединен с возможностью обмена данными с указанными измерительными датчиками и с внешним источником управления (например, с сервером 300) с обеспечением возможности выдачи указанных измеренных параметров состояния фюзеляжа транспортного средства на внешний источник управления и дополнительно выполнен с возможностью приема от внешнего источника управления управляющих инструкций в ответ на указанные параметры состояния фюзеляжа транспортного средства с обеспечением возможности генерирования и выдачи своих управляющих команд с учетом указанных управляющих инструкций от внешнего источника управления. Следует отметить, что в качестве датчиков для измерения параметров состояния фюзеляжа 102 в транспортном средстве 100 могут быть использованы, например, датчики вибрации, тензорезисторы, датчики силы и т.п.
Как показано на фиг. 1-4, фюзеляж 102 в транспортном средстве 100 ограничивает или задает внутреннее пространство 114, в котором в части, соответствующей кабине транспортного средства 100, установлено кресло 112 пилота, в котором может быть размещен пилот (не показан), способный управлять транспортным средством 100 с использованием приборной панели (не показана) и органов управления (не показаны), которые также могут быть размещены в указанной кабине. Кроме того, во внутреннем пространстве 114, ограниченном фюзеляжем 102, помимо пилота также могут быть размещены по меньшей мере один пассажир, по меньшей мере один предмет багажа пассажира и/или по меньшей мере один предмет груза, при этом указанные пилот, пассажиры, предметы груза и предметы багажа пассажиров могут быть размещены на соответствующих местах в общем внутреннем пространстве 114 или могут быть размещены каждая в отдельной зоне, ограниченной одной или более перегородками, или отдельном отсеке, ограниченном одной или более перегородками.
В одном из вариантов реализации настоящего изобретения кресло 112 пилота может быть размещено в кабине пилота (не показана) в транспортном средстве 100, отделенной перегородкой от остальной части внутреннего пространства 114, которая в свою очередь может быть разделена другой перегородкой на пассажирский отсек, в котором могут быть установлены одно или более пассажирских кресел для размещения в них пассажиров, и багажный или грузовой отсек, в котором может быть размещен груз (в частности, один или более предметов груза) и/или пассажирский багаж (в частности, один или более предметов багажа пассажиров), при этом указанные предметы груза, предметы багажа пассажиров и/или пассажирские кресла могут быть размещены или закреплены на дне или полу фюзеляжа 102. В одной из разновидностей данного варианта реализации настоящего изобретения в пассажирском отсеке вместо пассажирских кресел могут быть предусмотрены: (i) поручни, установленные на боковых стенках и/или полу фюзеляжа 102 для размещения пассажиров сидя или стоя на полу фюзеляжа 102; (ii) кушетки, кровати или скамейки, закрепленные на полу фюзеляжа 102 для размещения на них пассажиров в положении сидя или лежа; (iii) специализированные места для размещения инвалидов в положении сидя или лежа; (iv) специализированные места для размещения инвалидных колясок, используемых людьми с инвалидностью; (v) специализированные места для размещения детских колясок, используемых малолетним детьми; (v) специализированные места для размещения детских люлек, используемых младенцами; и (при необходимости) их сопровождающих; и/или (vi) специализированные места для размещения медицинских каталок для транспортировки больных, используемых лежачими больными. Следует отметить, что количество пассажиров в пассажирском отсеке может составлять от одного человека до нескольких десятков или даже сотен человек без введения каких-либо ограничений, при этом указанное количество пассажиров по сути ограничено лишь площадью пассажирского отсека в пределах внутреннего пространства 114. В другой разновидности данного варианта реализации настоящего изобретения в грузовом отсеке может быть предусмотрена не только возможность размещения груза и/или пассажирского багажа на полу фюзеляжа 102 и возможность из закрепления там с помощью стандартных крепежных средств, известных в уровне технике, но и могут быть дополнительно предусмотрены полки, подвесы, ящики и прочие несущие средства, закрепленные на полу и/или боковых стенках фюзеляжа 102 и позволяющие размещать дополнительные предметы груза и/или предметы багажа пассажиров в грузовом отсеке. Еще в одной разновидности данного варианта реализации настоящего изобретения места для пассажирского багажа, в том числе полки, подвесы, ящики и прочие несущие средства для размещения предметов багажа пассажиров, могут быть предусмотрены только в пассажирском отсеке в дополнение к вышеописанным вариантам средств для размещения пассажиров в указанном пассажирском отсеке. Для специалиста в данной области техники должно быть очевидно, что предметы груза и/или предметы багажа пассажиров могут быть по меньшей мере частично закреплены или зафиксированы и с наружной стороны фюзеляжа 102 с использованием подходящих крепежных средств, известных в уровне техники (например, с помощью специального навесного оборудование закрытого типа, используемого в самолетах, автомобилях, мотоциклах, вертолетах, велосипедах и т.п.). Следует отметить, что вышеописанные кабина пилота, пассажирский отсек и грузовой отсек в транспортном средстве 100 могут быть выполнены в целом аналогично соответствующим отсекам самолетов, вертолетов, автобусов, автомобилей, кораблей, катеров и т.п.
В другом варианте реализации настоящего изобретения кресло 112 пилота может быть размещено в кабине пилота (не показана) в транспортном средстве 100, отделенной перегородкой от остальной части внутреннего пространства 114, в которой в свою очередь на дне или полу фюзеляжа 102 могут быть размещены или закреплены пассажиры (например, в пассажирских креслах), предметы груза и предметы багажа пассажиров. Кроме того, возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве 114 могут быть размещены только пилот и пассажиры; возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве 114 могут быть размещены только пилот и груз; возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве 114 могут быть размещены только пассажиры и груз; возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве 114 могут быть размещены только пассажиры; возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве 114 может быть размещен только пилот в кресле 112 пилота; и возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве 114 может быть размещен только груз.
Следует отметить, что органы управления (не показаны), которые могут быть установлены во внутреннем пространстве 114, ограниченном фюзеляжем 102, в транспортном средстве, показанном на фиг. 1-4, по сути позволяют управлять транспортным средством 100 в полуавтоматическом режиме (т.е. сочетание ручного управления с помощью пилота и автоматического управления с помощью автопилота) и обеспечивают возможность ручного ввода пилотом, находящимся в кресле 112 пилота и отслеживающим показания приборов на приборной панели (не показана), по меньшей мере одной управляющей команды. Органы управления (не показаны) соединены с возможностью обмена данными с нижеописанным модулем управления (не показан) с обеспечением возможности выдачи каждой из указанных управляющих команд пилота в указанный модуль управления, при этом некоторые из указанных управляющих команд пилота могут по сути заменять соответствующие управляющие команды модуля управления, генерируемые модулем управления (не показан) при управлении транспортным средством 100 в автоматическом режиме (т.е. режиме автопилота). В одном из вариантов реализации настоящего изобретения может быть не предусмотрено участие пилота в процессе управления транспортным средством 100, в связи с чем вышеописанные приборная панель (не показана), органы управления (не показаны) и кресло 112 пилота могут отсутствовать во внутреннем пространстве 114, а управление транспортным средством 100 может быть реализовано фактически полностью в автоматическом режиме (т.е. режиме автопилота) с помощью нижеописанного модуля управления (не показан). В другом варианте реализации настоящего изобретения вышеописанные органы управления (не показаны) и/или вышеописанная приборная панель (не показана) могут входить в состав нижеописанного модуля управления, что позволяет этому модулю управления одновременно обеспечивать возможность ручного управления транспортным средством 100 с помощью пилота и возможность автоматического управления транспортным средством 100 в режиме автопилота.
Как показано на фиг. 1-4, фюзеляж 102 в транспортном средстве 100 также снабжен модулем 104 хранения, выполненным с возможностью съемного размещения (хранения или парковки) в нем нижеописанных беспилотных летательных аппаратов 200 в количестве, соответствующем заданной вместимости этого модуля 104 хранения, и модулем 106 стыковки, выполненным с возможностью разъемного взаимодействия по меньшей мере с одним из беспилотных летательных аппаратов 200, размещенных в модуле 104 хранения, с обеспечением возможности его пристыковки к фюзеляжу 102 или возможности его соединения с фюзеляжем 102, что обеспечивает возможность перемещения транспортного средства 100 по воздуху, воде и/или суше при приведении в действие или включении указанных беспилотных летательных аппаратов 200, пристыкованных к фюзеляжу 102 или соединенных с фюзеляжем 102.
В одном из вариантов реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть снабжен двумя и более одинаковыми или разными модулями 104 хранения, выполненными каждый с возможностью размещения в нем нижеописанных беспилотных летательных аппаратов 200, и двумя и более модулями 106 стыковки, выполненными каждый с возможностью разъемного взаимодействия по меньшей мере с одним из беспилотных летательных аппаратов 200, размещенных в любом из указанных модулей 104 хранения, с обеспечением возможности его пристыковки или присоединения к фюзеляжу 102, что обеспечивает возможность перемещения транспортного средства 100 по воздуху, воде и/или суше при приведении в действие или включении указанных беспилотных летательных аппаратов 200, пристыкованных или присоединенных к фюзеляжу 102.
Кроме того, фюзеляж 102 в транспортном средстве 100, показанном на фиг. 1-2, содержит модуль управления (не показан), который выполнен с возможностью выдачи управляющих команд по меньшей мере на один из беспилотных летательных аппаратов 200, хранящихся в модуле 104 хранения, что позволяет высвободить или выпустить указанный беспилотный летательный аппарат 200 из модуля 104 хранения с обеспечением возможности его направления к модулю 106 стыковки под управлением модуля управления (не показан) для взаимодействия с модулем 106 стыковки, в результате которого этот беспилотный летательный аппарат 200 оказывается соединенным с фюзеляжем 102, при этом указанные управляющие команды на выпуск беспилотного летательного аппарата 200 из модуля 104 хранения могут быть сгенерированы модулем управления (не показан) перед взлетом транспортного средства 100, после посадки транспортного средства 100, нахождении транспортного средства 100 на месте стоянки или остановке (например, на парковочной станции 400) или в процессе перемещения транспортного средства 100 по воздуху, воде и/или суше. Кроме того, модуль управления (не показан) дополнительно выполнен с возможностью выдачи управляющих навигационных команд по меньшей мере на один из беспилотных летательных аппаратов 200, соединенных с фюзеляжем 102, что позволяет вывести указанный беспилотный летательный аппарат 200 из взаимодействия с модулем 106 стыковки с обеспечением возможности его отстыковки от фюзеляжа 102 с обеспечением возможности его направления к модулю 104 хранения под управлением модуля управления (не показан) для размещения в модуле 104 хранения в свободном для размещения месте.
Следует отметить, что модуль 104 хранения для хранения беспилотных летательных аппаратов может быть выполнен в виде одиночного модуля хранения, выполненного с возможностью размещения в нем нижеописанных беспилотных летательных аппаратов 200, или группы из нескольких модулей хранения, совпадающих или отличающихся по конструкции и выполненных каждый с возможностью размещения в нем нижеописанных беспилотных летательных аппаратов 200.
В одном из вариантов реализации настоящего изобретения фюзеляж 102 может быть снабжен одним и более модулями 104 хранения, по меньшей мере в одном из которых могут быть предварительно размещены беспилотные летательные аппараты 200, а остальные модули 104 хранения из указанных моделей 104 хранения могут оставаться свободными и доступными для размещения в них беспилотных летательных аппаратов 200. В одной из разновидностей данного варианта реализации настоящего изобретения по меньшей мере один из модулей 104 хранения, которыми снабжен фюзеляж 102 и в которых предварительно размещены беспилотные летательные аппараты 200, может быть полностью заполнен беспилотными летательными аппаратами 200 (т.е. нет свободных слотов или мест для размещения дополнительных беспилотных летательных аппаратов 200), а по меньшей мере один другой из указанных модулей 104 хранения, в которых предварительно размещены беспилотные летательные аппараты 200, может быть частично заполнен беспилотными летательными аппаратами 200 (т.е. имеются свободные слоты или места для размещения в них беспилотных летательных аппаратов 200). Таким образом, в рамках данного варианта реализации настоящего изобретения возможен случай, когда фюзеляж 102 в транспортном средстве 100 может быть снабжен только двумя модулями 104 хранения, один из которых может быть полностью или частично заполнен беспилотными летательными аппаратами 200 и другой из которых может быть вообще не заполнен или частично заполнен беспилотными летательными аппаратами 200.
В другом варианте реализации настоящего изобретения фюзеляж 102 может быть снабжен одним и более модулями 104 хранения, однако ни в одном из указанных моделей 104 хранения предварительно не размещены беспилотные летательные аппараты 200, при этом беспилотные летательные аппараты 200, необходимые для перемещения транспортного средства 100, могут быть автоматические направлены к одному или более модулей 106 стыковки, входящих в состав этого транспортного средства 100, с обеспечением их соединения с фюзеляжем 102 этого транспортного средства 100 в ответ на соответствующий запрос, сгенерированный модулем управления этого транспортного средства 100, и/или пилотом, управляющим этим транспортным средством 100 с помощью нижеописанных органов управления и ввода управляющих команд, и/или нижеописанным сервером 300, и/или одной из нижеописанных парковочных станций 400, и/или модулем управления другого транспортного средства 100 и/или пилотом другого транспортного средства 100.
Еще в одном варианте реализации настоящего изобретения модуль 106 стыковки в транспортном средстве 100 может быть предварительно введен во взаимодействие по меньшей мере с одним беспилотным летательным аппаратом 200, т.е. с фюзеляжем 102 может быть предварительно соединен по меньшей мере один беспилотный летательный аппарат 200.
В ином варианте реализации настоящего изобретения модуль 106 стыковки может быть снабжен на постоянной основе по меньшей мере одним беспилотным летательным аппаратом 200, введенным взаимодействие с модулем 106 стыковки без возможности выхода из взаимодействия с ним при перемещении транспортного средства 100, при этом такой беспилотный летательный аппарат 200 может быть электрически соединен с одним из нижеописанных зарядных устройств, которыми может быть снабжен модуль 104 хранения, или может быть электрически соединен с нижеописанным источником питания (не показан), которым может быть снабжен фюзеляж 102.
В некоторых вариантах реализации настоящего изобретения фюзеляж 102 может представлять собой каркас (т.е. остов из скрепленных между собой несущих конструктивных элементов, который не снабжен ни крышей, ни стенами, ни полом), на котором смонтированы или установлены вышеописанные модуль управления (не показан), модуль 106 стыковки, модуль 104 хранения БЛА, сиденья или кресла для пассажиров, сиденье или кресло для пилота, и/или места для багажа.
Следует также отметить, что нижеописанные беспилотные летательные аппараты 200 могут как входить в состав транспортного средства 200, так и не входить в состав этого транспортного средства, при этом модуль 104 хранения в транспортном средстве 100 может быть адаптирован или приспособлен для размещения в нем беспилотных летательных аппаратов 200 с различными модификациями и габаритами, известными в уровне техники, и модуль 106 стыковки в транспортном средстве 100 также может быть адаптирован или приспособлен для взаимодействия с беспилотными летательными аппаратами 200 с различными модификациями и габаритами, известными в уровне техники.
Неограничивающими примерами средств для обеспечения разъемного взаимодействия беспилотного летательного аппарата 200 с модулем 106 стыковки являются следующие соединительные элементы, которыми должен быть снабжен модуль 106 стыковки в соответствующих стыковочных местах: различные подходящие механические соединительные или крепежные средства (кронштейны, захваты, крепежи, монтажные пазы, зацепы, крюки, защелки и т.д.), электромеханические средства под управлением модуля управления (например, электромеханические средства стыковки для стыковки ответным пристыковываемым элементом, электромеханические средства захвата для захвата ответного захватываемого элемента, или т.п.), электромагнитные средства под управлением модуля управления, магнитные средства, вакуумные захваты под управлением модуля управления и/или т.д. Следует отметить, что если модуль 104 хранения снабжен любым соединительным элементом из вышеперечисленных механических соединительных или крепежных средств, электромеханических средств, электромагнитных средств, магнитных средств и вакуумных захватов для разъемного взаимодействия с беспилотным летательным аппаратом 200, то сам беспилотный летательный аппарат 200 должен быть снабжен ответными соединительными средствами подходящего типа, обеспечивающими возможность формирования разъемного соединения с соответствующими соединительными средствами, использованными в указанном модуле 106 стыковки.
Модуль управления (не показан), входящий в состав каждого из транспортных средств 100, показанных на фиг. 1-4, может представлять собой совокупность аппаратных и программных средств, обеспечивающих выполнение заданных функциональных возможностей, описанных в данном документе. В частности, модуль управления (не показан) в транспортном средстве 100 может представлять собой процессорное или вычислительное устройство, получающее доступ к управляющим программным инструкциям с обеспечением их исполнения для осуществления релевантных функциональных возможностей, описанных в данном документе.
Кроме того, модуль управления (не показан) в транспортном средстве 100 может получать доступ к управляющим программным инструкциям с обеспечением их исполнения для осуществления (i) дистанционного управления нижеописанными беспилотными летательными аппаратами 200 в полностью автоматическом режиме (автопилот), (ii) осуществления управления беспилотными летательными аппаратами 200 в полуавтоматическом режиме, предусматривающем получение по меньшей части управляющих команд от пилота, который вводит их посредством по меньшей мере одного из устройств ввода команд, входящих в состав органов управления в кабине пилота, или (iii) осуществления управления беспилотными летательными аппаратами 200 в автоматическом режиме при получении по меньшей части управляющих команд от внешнего источника управления (например, от нижеописанного сервера 300, одной из нижеописанных парковочных станций 400, модуля управления другого транспортного средства 100, спутника, диспетчерской вышки и/или т.п.) по каналу беспроводной передачи данных, установленному между модулем управления транспортного средства 100 и указанным внешним источником управления.
Таким образом, транспортное средство 100 может быть направлено или перемещено, посредством модуля управления этого транспортного средства 100, в конкретную географическую область как в автоматическом режиме (автопилот без вмешательства пилота) в ответ на управляющие команды указанного модуля управления или одного из вышеописанных внешних источников управления, так и в полуавтоматическом режиме (автопилот с вмешательством пилота) в ответ на управляющие команды пилота, введенные им с помощью нижеописанных органов управления транспортного средства 100. Другими словами, возможен случай, когда решение о направлении или перемещении транспортного средства 100 в конкретную географическую область может быть принято пилотом этого транспортного средства 100, который может ввести соответствующую управляющую команду в модуль управления транспортного средства 100 с помощью нижеописанных органов управления транспортного средства 100, при этом указанная географическая область может находиться радом с одной или более из нижеописанных парковочных станций 400 и/или радом с одним или более других транспортных средств 100.
Модуль управления (не показан) в транспортном средстве 100 может содержать один или несколько интерфейсов передачи данных для отправки и/или получения сигналов/команд/запросов/инструкций. Следует отметить, что сами интерфейсы передачи данных, базы данных и иное аппаратное обеспечение могут либо входить в состав модуля управления, либо могут быть реализованы в виде отдельных модулей или блоков, соединенных с модулем управления с возможностью обмена данными.
В одном из вариантов реализации настоящего изобретения модуль управления (не показан) в транспортном средстве 100 может быть соединен по сети связи с внешним источником управления с обеспечением возможности обмена с ним данными. В частности, модуль управления (не показан) в транспортном средстве 100 может быть выполнен с возможностью получения или приема управляющих команд или инструкций по меньшей мере от одного внешнего источника управления, которые могут представлять собой каждый, например, нижеописанные беспилотные летательные аппараты 200, нижеописанный сервер 300 (см. фиг. 5), парковочные станции 400 (см. фиг. 5), независимое устройство дистанционного управления, функциональное соединенное с возможностью обмена данными с модулем управления, или т.п., так что модуль связи может выдавать свои управляющие команды, описанные в данном документе, в ответ на управляющие инструкции, полученные этим модулем управления по меньшей мере от одного внешнего источника управления, с которым модуль управления предварительно запрограммирован обмениваться данными или с которым модуль управления предварительно запрограммирован устанавливать связь.
Кроме того, модуль управления (не показан) в транспортном средстве 100 может иметь доступ к одной или нескольким локальным или удаленным базам данных (не показаны), измерительным устройствам или датчикам (не показаны), установленным с внешней и внутренней сторон фюзеляжа 102, беспилотным летательным аппаратам 200 и/или внешним источникам управления (например, к серверу 300 или парковочным станциям 400).
Модулю управления (не показан) могут быть первоначально сообщены по меньшей мере следующие данные, используемые модулем управления при осуществлении своих функций: (a) маршрут следования транспортного средства 100 со всеми целевыми промежуточными остановками до пункта назначения, включая географические координаты каждой из указанных остановок и пункта назначения, а также длительность или продолжительность каждой из указанных промежуточных остановок; (b) первоначальный снаряженный вес или первоначальная снаряженная масса транспортного средства 100, который по сути является суммой весов или масс по меньшей мере следующих компонентов транспортного средства 100: фюзеляж 200 и прочие конструктивные элементы транспортного средства 100, шасси 116, силовая установка (не показана) и связанные с ней функциональные элементы и системы, различное бортовое оборудование (не показано), различное снаряжение (включая пилота, багаж пилота, жидкости и газы, бытовое снаряжение, служебное снаряжение, снаряжение для багажа и груза и т.п.); и (c) первоначальный вес полезной нагрузки, который по сути является суммой весов по меньшей мере следующих объектов в транспортном средстве 100: пассажиры, багаж пассажиров, грузы (включая грузовые контейнеры и поддоны), дополнительные элементы снаряжения (включая специальное аварийно-спасательное снаряжение в виде лодок, плота, спасательных жилетов, аварийных пайков, ружей и/или т.п.) и топливо (при наличии); (d) плановый измененный вес полезной нагрузки на каждой из целевых промежуточных остановок в соответствии с маршрутом следования. Следует отметить, что вышеуказанные данные могут быть сообщены модулю управления путем их ввода вручную пилотом с обеспечением их записи в локальную базу данных, путем их передачи в виде пакета данных от внешнего источника управления по каналу беспроводной передачи данных, установленному между модулем управления и этим внешним источником связи, или могут быть получены модулем связи из удаленного хранилища данных, к которому модуль связи имеет доступ, в ответ на запрос модуля связи, или т.п.
Следует отметить, в одном из вариантов реализации настоящего изобретения модуль 104 хранения может представлять собой неподвижную конструкцию, которая выполнена с возможностью размещения на ней или в ней нижеописанных беспилотных летательных аппаратов 200 и которая может быть (i) закреплена на фюзеляже 102 с его внешней стороны, (ii) полностью установлена или закреплена в фюзеляже 102 во внутреннем пространстве 114 и выполнена открытой по меньшей мере частично во внешнюю среду, окружающую фюзеляж 102 (например, с помощью подходящего отверстия, выполненного в фюзеляже 102 в месте, соответствующем открытой части такой конструкции), или (iii) частично вделана или встроена в тело фюзеляжа 102 с обеспечением доступа к ней с внешней стороны фюзеляжа 102. В другом варианте реализации настоящего изобретения модуль 104 хранения может представлять собой подвижную конструкцию, которая находится под управлением модуля управления (не показан), выполнена с возможностью размещения на ней или в ней нижеописанных беспилотных летательных аппаратов 200 и может быть (i) закреплена на фюзеляже 102 с его внешней стороны с возможностью ее по меньшей мере частичного развертывания, раскладывания или раздвижения под управлением модуля управления с обеспечением возможности ее возврата в первоначальное состояние под управлением модуля управления после размещения беспилотных летательных аппаратов 200, (ii) полностью установлена или закреплена в фюзеляже 102 во внутреннем пространстве 114 с возможностью ее выдвижения из фюзеляжа 102 и/или возможностью ее развертывания за пределами фюзеляжа 102 под управлением модуля управления с обеспечением возможности ее возврата в первоначальное состояние под управлением модуля управления после размещения беспилотных летательных аппаратов 200, или (iii) частично вделана или встроена в тело фюзеляжа 102 с возможностью ее по меньшей мере частичного развертывания, раскладывания, раздвижения или выдвижения под управлением модуля управления с обеспечением возможности ее возврата в первоначальное состояние под управлением модуля управления после размещения беспилотных летательных аппаратов 200. Еще в одном варианте реализации настоящего изобретения модуль 104 хранения может представлять собой неподвижную конструкцию, которая может быть закреплена на фюзеляже 102 с его внешней стороны, закреплена внутри фюзеляжа 102 или частично вделана/встроена в тело фюзеляжа 102, при этом доступ к свободным местам для размещения беспилотных летательных аппаратов 200 или к самим беспилотным летательным аппаратам 200 может быть обеспечен под управлением модуля управления путем, например, открытия заграждающей или покрывающей конструкции, которая предотвращает возможность доступа к модулю 104 хранения с внешней стороны фюзеляжа 102 и которая может представлять собой, например, (i) люк, дверцу или створки, выполненные в теле фюзеляжа 102, либо (ii) люк, дверцу или створки, выполненные в корпусе, окружающем или охватывающем модуль 104 хранения, либо (iii) сочетание вышеперечисленного (т.е. сочетание (i) с (ii)). В некотором другом варианте реализации настоящего изобретения модуль 104 хранения может представлять собой подвижную конструкцию, которая может быть закреплена на фюзеляже 102 с его внешней стороны, закреплена внутри фюзеляжа 102 или частично вделана или встроена в тело фюзеляжа 102, при этом возможность приведения в действие модуля 104 хранения с обеспечением его развертывания, раздвижения, раскладывания или выдвижения с последующим возвратом в первоначальное положение может быть обеспечена под управлением модуля управления путем, например, открытия заграждающей или покрывающей конструкции, которая предотвращает возможность перемещения модуля 104 хранения в сторону от фюзеляжа 102 и которая может представлять собой, например, (i) люк, дверцу или створки, выполненные в теле фюзеляжа 102, либо (ii) люк, дверцу или створки, выполненные в защитном корпусе, окружающем или охватывающем модуль 104 хранения, либо (iii) элемент или пластину, закрепленную на фюзеляже 102 и предотвращающую возможность осуществления операции развертывания, раздвижения, раскладывания или выдвижения модуля 104 хранения, либо (iv) сочетание вышеперечисленного (т.е. сочетание (i), (ii) и (iii)). В некотором ином варианте реализации настоящего изобретения модуль 104 хранения может представлять собой неподвижную конструкцию, которая может быть жестко закреплена на фюзеляже 102 с его внешней стороны или частично вделана/встроена в тело фюзеляжа 102 и которая может быть закрыта заграждающей или покрывающей конструкцией (например, внешним чехлом, кожухом или защитным корпусом), предотвращающей доступ с внешней стороны фюзеляжа 102 к свободным местам модуля 104 хранения для размещения беспилотных летательных аппаратов 200 или к самим беспилотным летательным аппаратам 200 в модуле 104 хранения и находящейся под управлением модуля управления, при этом доступ к такому модулю 104 хранения может быть обеспечен путем, например, открытия, раскрытия, распахивания, смещения, сдвигания или удаления указанной заграждающей или покрывающей конструкции под управлением модуля управления с обеспечением возможности ее последующего возврата в первоначальное положение под управлением модуля управления после размещения беспилотных летательных аппаратов 200.
Следует также отметить, в одном из вариантов реализации настоящего изобретения модуль 106 стыковки может представлять собой неподвижную конструкцию, которая выполнена с возможностью взаимодействия с ней нижеописанных беспилотных летательных аппаратов 200 и которая может быть (i) закреплена на фюзеляже 102 с его внешней стороны, или (ii) частично вделана или встроена в тело фюзеляжа 102 с обеспечением доступа к ней с внешней стороны фюзеляжа 102. В другом варианте реализации настоящего изобретения модуль 106 стыковки может представлять собой подвижную конструкцию, которая находится под управлением модуля управления (не показан), которая выполнена с возможностью взаимодействия с ней нижеописанных беспилотных летательных аппаратов 200 и которая может быть (i) закреплена на фюзеляже 102 с его внешней стороны с возможностью ее по меньшей мере частичного развертывания, раскладывания или раздвижения под управлением модуля управления с обеспечением возможности ее возврата в первоначальное состояние под управлением модуля управления, (ii) полностью установлена или закреплена в фюзеляже 102 во внутреннем пространстве 114 с возможностью ее по меньшей мере частичного выдвижения из фюзеляжа 102 и/или возможностью ее развертывания за пределами фюзеляжа 102 под управлением модуля управления с обеспечением возможности ее возврата в первоначальное состояние под управлением модуля управления, или (iii) частично вделана или встроена в тело фюзеляжа 102 с возможностью ее по меньшей мере частичного развертывания, раскладывания, раздвижения или выдвижения под управлением модуля управления с обеспечением возможности ее возврата в первоначальное состояние под управлением модуля управления. Еще в одном варианте реализации настоящего изобретения модуль 106 стыковки может представлять собой неподвижную конструкцию, которая может быть закреплена на фюзеляже 102 с его внешней стороны, закреплена внутри фюзеляжа 102 или частично вделана/встроена в тело фюзеляжа 102, при этом доступ к свободным стыковочным местам для взаимодействия с ними беспилотных летательных аппаратов 200 с обеспечением их соединения с фюзеляжем может быть обеспечен под управлением модуля управления путем, например, открытия заграждающей или покрывающей конструкции, которая предотвращает возможность доступа к модулю 106 стыковки с внешней стороны фюзеляжа 102 и которая может представлять собой, например, (i) люк, дверцу или створки, выполненные в теле фюзеляжа 102, либо (ii) люк, дверцу или створки, выполненные в корпусе, окружающем или охватывающем модуль 106 стыковки, либо (iii) сочетание вышеперечисленного (т.е. сочетание (i) с (ii)). В некотором другом варианте реализации настоящего изобретения модуль 104 хранения может представлять собой подвижную конструкцию, которая может быть закреплена на фюзеляже 102 с его внешней стороны, закреплена внутри фюзеляжа 102 или частично вделана/встроена в тело фюзеляжа 102, при этом возможность приведения в действие модуля 106 стыковки с обеспечением его развертывания, раздвижения, раскладывания или выдвижения может быть обеспечена под управлением модуля управления путем, например, открытия заграждающей или покрывающей конструкции, которая предотвращает возможность перемещения модуля 106 стыковки в сторону от фюзеляжа 102 и которая может представлять собой, например, (i) люк, дверцу или створки, выполненные в теле фюзеляжа 102, либо (ii) люк, дверцу или створки, выполненные в защитном корпусе, окружающем или охватывающем модуль 106 стыковки, либо (iii) элемент или пластину, закрепленную на фюзеляже 102 и предотвращающую возможность осуществления операции развертывания, раздвижения, раскладывания или выдвижения модуля 106 стыковки, либо (iv) сочетание вышеперечисленного (т.е. сочетание (i), (ii) и (iii)). В некотором ином варианте реализации настоящего изобретения модуль 106 стыковки может представлять собой неподвижную конструкцию, которая может быть жестко закреплена на фюзеляже 102 с его внешней стороны или частично вделана/встроена в тело фюзеляжа 102 и которая может быть закрыта заграждающей или покрывающей конструкцией (например, внешним чехлом, кожухом или защитным корпусом), предотвращающей доступ с внешней стороны фюзеляжа 102 к свободным стыковочным местам в модуле 106 стыковки для взаимодействия с ними беспилотных летательных аппаратов 200 с обеспечением их соединения с фюзеляжем 102 и находящейся под управлением модуля управления, при этом доступ к такому модулю 106 стыковки может быть обеспечен путем, например, открытия, раскрытия, распахивания, смещения, сдвигания или удаления указанной заграждающей или покрывающей конструкции под управлением модуля управления с обеспечением возможности ее последующего возврата в первоначальное положение под управлением модуля управления (по мере необходимости).
Кроме того, фюзеляж 102 в транспортном средстве 100, показанном на фиг. 1-4, снабжен источником питания (не показан), который представляет собой одну или более аккумуляторных батарей и который может быть установлен на фюзеляже 102 или внутри него, а модуль 104 хранения снабжен одним или более зарядными устройствами (не показаны), электрически соединенными каждый с указанным источником питания и обеспечивающими каждый возможность подключения к нему по меньшей мере одного из беспилотных летательных аппаратов 200, размещенных в модуле 104 хранения, с обеспечением возможности его подзарядки или дозарядки. Следует отметить, что каждое из зарядных устройств (не показаны) в модуле 104 хранения представляет собой беспроводное зарядное устройство, проводное зарядное устройство или зарядную док-станцию. В одном из вариантов реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может содержать два и более отдельных или электрически связанных между собой источников питания, каждый из которых содержит одну или более аккумуляторных батарей. В другом варианте реализации настоящего изобретения каждый источник питания (не показан) может представлять собой по меньшей мере одно из группы, содержащей: генератор на основе двигателя внутреннего сгорания, генератор на основе водородного двигателя, солнечную батарею и любой иной подходящий источник энергии, известный в уровне техники расположенный внутри или на фюзеляже 102. Еще в одном варианте реализации настоящего изобретения источник питания (не показан) может быть выполнен с возможностью его подключения к внешнему источнику питания (не показан), например к электрической сети. Таким образом, при размещении беспилотных летательных аппаратов 200 в модуле 104 хранения каждый из них может быть электрически соединен с одним из источников питания транспортного средства 100 посредством соответствующего зарядного устройства (не показано), электрически соединенного с указанным источником питания, с обеспечением зарядки указанного беспилотного летательного аппарата 200. Кроме того, любой из источников питания, входящих в состав транспортного средства 100, может быть использован и для подачи питания на модуль управления, различные датчики и измерительные устройства, используемые в транспортном средстве 100 и описанные в данном документе, и на иные подвижные и/или электронные компоненты, используемые в транспортном средстве 100 и описанные в данном документе, однако специалисту в данной области техники должно быть очевидно, что указанные компоненты могут иметь каждый свой источник питания, установленный внутри их корпуса.
В одном из вариантов реализации настоящего изобретения по меньшей мере одно из зарядных устройств (не показаны), которыми может быть снабжен модуль 104 хранения в транспортном средстве 100, может быть гидравлически соединено с помощью насоса, соединенного гидравлической линией с резервуаром или емкостью с топливом с возможностью забора топлива из указанной емкости, с обеспечением возможности подачи указанного забранного объема топлива в топливный бак беспилотного летательного аппарата 200, гидравлически соединенный с работающим на топливе двигателем беспилотного летательного аппарата 200, для восполнения запаса его хода (в частности, благодаря по меньшей мере частичному восполнения объема топлива в топливном баке беспилотного летательного аппарата 200).
Беспилотные летательные аппараты 200, входящие в разъемное взаимодействие каждый с одним из модулей 106 стыковки с обеспечением соединения с фюзеляжем 102, представляют собой каждый отдельное беспилотное транспортное средство, способное перемещаться по воздуху по управлением модуля управления транспортного средства 100 или под управлением внешнего источника управления (например, сервера 300 или парковочной станции 400), который может выдавать управляющие навигационные команды или инструкции на модуль управления полетом для управления полетом указанного беспилотного транспортного средства 200. Каждый из беспилотных летательных аппаратов 200 содержит один или более бортовых источников питания, в качестве каждого из которых может быть использована аккумуляторная батарея, солнечная батарея, водородный топливный элемент, топливный элемент любого иного подходящего типа, известного в уровне техники, генератор на основе двигателя внутреннего сгорания, генератор на основе воздушно-реактивного двигателя, генератор на основе водородного двигателя или т.п.
Управление полетом каждого из беспилотных летательных аппаратов 200 может быть осуществлено, например, с использованием стандартных программно-аппаратных средств, используемых в уровне технике для управления подобными беспилотными летательными аппаратами 200 и поставляемых вместе с такими беспилотными летательными аппаратами 200. В частности, в качестве беспилотных летательных аппаратов 200 могут быть использованы имеющиеся на рынке беспилотные летательные аппараты 200 любого типа и любой модификации, снабженные встроенной функцией автопилота и/или встроенной функцией дистанционного ручного или автоматического управления. В одном из вариантов реализации каждый из беспилотных летательных аппаратов 200 может управлять оператором, который может находиться непосредственно внутри фюзеляжа 102 или который может осуществлять дистанционное управление из иной локации, например из мобильного или стационарного пункта управления полетом беспилотных летательных аппаратов.
Кроме того, каждый из беспилотных летательных аппаратов 200 также содержит раму/каркас/корпус, по меньшей мере один винтовой движитель, электрически соединенный с источником питания для приведения его в действие с обеспечением перемещения беспилотного летательного аппарата 200 по воздуху и по меньшей мере одно из следующих средств беспроводной связи: радиоантенна КВ диапазона, радиоантенна УКВ диапазона, радиоантенна СВЧ диапазона, модуль оптической связи, модуль спутниковой связи полудуплекс/симплекс, модуль сотовой связи 2G/3G/4G/LTE/5G, сетевая беспроводная связь между несколькими беспилотными летательными аппаратами и/или ретрансляторами и т.п.
Кроме того, каждый из беспилотных летательных аппаратов 200 может дополнительно содержать по меньшей мере один из следующих сенсоров: сенсор обнаружения препятствий (лидар, УЗ-датчик, ИК-сенсор, радар, видеосенсор и т.п.), сенсор позиционирования (гиросенсор, GPS, Глонасс, радар и т.п.). Кроме того, каждый из беспилотных летательных аппаратов 200 может дополнительно содержать датчик уровня заряда батареи, выполненный с возможностью определения запаса заряда батареи беспилотного летательного аппарата 200. Кроме того, модуль управления полетом беспилотного транспортного средства, установленный в каждом беспилотном летательном аппарате 200, содержит процессор, который электрически соединен с бортовым источником питания, соединен с возможностью обмена данными с сенсорами беспилотного летательного аппарата 200, соединен с возможностью обмена данными со средствами беспроводной связи беспилотного летательного аппарата 200 и соединен с винтовыми движителями беспилотного летательного аппарата 200 с возможностью управления их работой, при этом указанный процессор выполнен с возможностью выполнения машиночитаемых управляющих команд или навигационных команд в автоматическом режиме или по меньшей мере частично на основе команд, принимаемых от оператора или иного внешнего источника управления по меньшей мере по одному каналу беспроводной связи.
Кроме того, каждый из беспилотных летательных аппаратов 200 может дополнительно содержать по меньшей мере одно средство для разъемного взаимодействия с модулем 106 стыковки, по меньшей мере одно средство для разъемного механического соединения указанного беспилотного летательного аппарата 200 по меньшей мере с одним другим беспилотным летательным аппаратом 200, средство для обеспечения последовательного или параллельного электрического соединения указанного беспилотного летательного аппарата 200 по меньшей мере с одним другим беспилотным летательным аппаратом 200 с возможностью отсоединения от него и/или средство для обеспечения разъемного электрического соединения аккумуляторной батареи указанного беспилотного летательного аппарата 200 с зарядным устройством модуля 104 хранения в зависимости от конкретного варианта реализации настоящего изобретения.
Неограничивающими примерами средств для обеспечения разъемного взаимодействия беспилотного летательного аппарата 200 с модулем 106 стыковки являются следующие соединительные элементы, выполненные на теле беспилотного летательного аппарата 200: различные подходящие механические соединительные или крепежные средства (кронштейны, захваты, крепежи, монтажные пазы, зацепы, крюки, защелки и т.д.), электромеханические средства под управлением модуля управления (например, электромеханические средства стыковки для стыковки ответным пристыковываемым элементом, электромеханические средства захвата для захвата ответного стыковочного элемента, или т.п.), электромагнитные средства под управлением модуля управления, вакуумные захваты под управлением модуля управления и/или т.д. Следует отметить, что если беспилотный летательный аппарат 200 снабжен любым соединительным элементом из вышеперечисленных механических соединительных или крепежных средств, электромеханических средств, электромагнитных средств, магнитных средств и вакуумных захватов для разъемного взаимодействия с модулем 106 стыковки, то сам модуль 106 стыковки в соответствующем стыковочном месте должен быть снабжен ответными соединительными средства подходящего типа, обеспечивающими возможность формирования разъемного соединения с соответствующими соединительными средствами, использованными в указанном беспилотном летательном аппарате 200.
Как показано на фиг. 1-4, модуль 106 стыковки, которым снабжен фюзеляж 102, представляет собой стыковочную конструкцию, частично вделанную или встроенную в фюзеляж 102, и содержит тяговые сцепные элементы 108, каждый из которых выполнен с возможностью разъемного сцепления по меньшей мере с одним из беспилотных летательных аппаратов 200 или с возможностью захвата по меньшей мере одного из беспилотных летательных аппаратов 200, при этом беспилотный летательный аппарат 200, который может быть сцеплен с соответствующим тяговым сцепным элементом 108, может представлять собой (i) беспилотный летательный аппарат 200, выпущенный из модуля 104 хранения, в котором он был размещен в транспортном средстве 100, (ii) беспилотный летательный аппарат 200, направленный из парковочной станции 400 к указанному модулю 106 стыковки, или (iii) беспилотный летательный аппарат 200, выпущенный из модуля 104 хранения другого транспортного средства 100. Для обеспечения сцепления беспилотного летательного аппарата 200 с тяговым сцепным элементом 108 этот беспилотный летательный аппарат 200 должен подлететь к свободному стыковочному месту, которое может представлять собой (a) конкретный участок поверхности модуля 106 стыковки, (b) конкретную область пространства вокруг модуля 106 стыковки или над ним, (c) область пространства вокруг тягового сцепного элемента 108 или (d) область пространства над тяговым сцепным элементом 108 или около него. Беспилотный летательный аппарат 200, находящийся в целевом стыковочном месте, вводят во взаимодействие с модулем 106 стыковки путем его сцепления с тяговым сцепным элементом 108, соответствующим указанному стыковочному месту. Перед осуществлением взлета транспортного средства 100 последовательно осуществляют по меньшей мере следующие операции: (1) выпускают первую группу беспилотных летательных аппаратов 200 из модуля 104 хранения; (2) направляют указанную первую группу беспилотных летательных аппаратов 200, выпущенную из модуля 104 хранения, к свободным стыковочным местам модуля 106 стыковки, каждое из которых соответствует одному из беспилотных летательных аппаратов 200 в указанной первой группе; (3) при нахождении указанных беспилотных летательных аппаратов 200 в соответствующих стыковочных местах модуля 106 стыковки вводят каждый из этих беспилотных летательных аппаратов 200 в сцепление с соответствующим одним из тяговых сцепных элементов 108 с обеспечением соединения с фюзеляжем 102; и (4-1) обеспечивают взлет или подъем в воздух фюзеляжа 102, соединенного тяговыми сцепными элементами 108 с соответствующими беспилотными летательными аппаратами 200, с обеспечением перемещения транспортного средства 100 по воздуху на заданной высоте полета, регулируемой модулем управления или (4-2) обеспечивают перемещение фюзеляжа 102, соединенного тяговыми сцепными элементами 108 с соответствующими беспилотными летательными аппаратами 200, с обеспечением перемещения транспортного средства 100 по воздуху, воде и/или суше. Аналогичным образом осуществляется операция ввода по меньшей мере одного беспилотного летательного аппарата 200 во взаимодействие с модулем 106 сцепления путем их его сцепления с соответствующим свободным тяговым сцепным элементом 108 для обеспечения соединения этого беспилотного летательного аппарата 200 с фюзеляжем 102 при перемещении транспортного средства 100 по воздуху, воде и/или суше, что по сути приводит к получению второй группы беспилотных летательных аппаратов 200, соединенных с фюзеляжем 102, при этом количество беспилотных летательных аппаратов 200 в этих первой и второй группах может совпадать или различаться. Следует отметить, что к беспилотным летательным аппаратам 200, которые могут войти в сцепление с каждым тяговым сцепным элементом 108, могут относиться беспилотные летательные аппараты 200, выпущенные из модуля 104 стыковки, беспилотные летательные аппараты 200 из парковочных станций 400, беспилотные летательные аппараты 200 из модулей 104 стыковки других транспортных средств 100 и/или любые иные беспилотные летательные аппараты, которые могут быть направлены к транспортному средству 100 в рамках предлагаемой технологии, описанной в данном документе.
В одном из вариантов реализации настоящего изобретения модуль 100 управления в транспортном средстве 100 может быть связан посредством беспроводной и/или проводной сетью передачи данных с множеством беспилотных летательных аппаратов 200, соединенных с фюзеляжем 102 транспортного средства 100 посредством модуля 106 стыковки, при этом при проводном подключении соответствующие тяговые сцепные элементы 108 могут быть дополнительно снабжены соответствующими проводными каналами передачи данных, а сцепные механизмы 110 могут быть дополнительно снабжены соответствующими разъемами для подключения и обмена данными с беспилотными летательными аппаратами 200.
Для вывода по меньшей мере одного беспилотного летательного аппарата из соединения с фюзеляжем 102 при перемещении транспортного средства 100 по воздуху, воде и/или суше (например, в полете) или после остановки транспортного средства 100 (например, после его приземления или посадки) осуществляют по меньшей мере следующие операции: (1) указанный беспилотный летательный аппарат 200 расцепляют или выводят из сцепления с соответствующим тяговым сцепным элементом 108 в соответствующем стыковочном месте модуля 106 стыковки, что приводит к выводу этого беспилотного летательного аппарата 200 из взаимодействия с модулем 106 стыковки; и (2) направляют отцепленный беспилотный летательный аппарат 200 к модулю 104 хранения с обеспечением его размещения в свободном для размещения месте в модуле 104 хранения для зарядки с помощью зарядного устройства, соответствующего указанному свободному для размещения месте.
Таким образом, посредством модуля 106 стыковки к фюзеляжу 102 могут быть присоединены беспилотные летательные аппараты 200 в количестве, необходимом для обеспечения достаточной подъемной силы для перемещения транспортного средства 100 с полезной нагрузкой по воздуху, воде и/или суше. К каждому тяговому сцепному элементу 108 может быть подключен или прицеплен один беспилотный летательный аппарат 200 или группа из нескольких беспилотных летательных аппаратов 200.
В одном из вариантов реализации настоящего изобретения по меньшей мере два из беспилотных летательных аппаратов 200, которые должны быть соединены с фюзеляжем 102, могут быть выполнены с возможностью механического соединения друг с другом с образованием составного беспилотного летательного аппарата, выполненного с возможностью разъемного взаимодействия по меньшей мере с одним из модулей 106 стыковки. Таким образом, один из вышеописанных беспилотных летательных аппаратов 200, соединенных с фюзеляжем 102 перед взлетом транспортного средства 100, во время перемещения транспортного средства 100 по воздуху, воде и/или суше (например, во время его полета) или после остановки транспортного средства 100 (например, после его посадки или приземления), может представлять собой составной беспилотный летательный аппарат (не показан), образованный из нескольких беспилотных летательных аппаратов 200, механически соединенных между собой. Следует отметить, что беспилотные летательные аппараты 200, образующие такой составной беспилотный летательный аппарат (не показан), могут быть механически соединенных друг с другом в горизонтальной плоскости и/или вертикальной плоскости с образованием летательной конструкции из соединенных между собой беспилотных летательных аппаратов 200, имеющей любые форму и геометрические размеры, подходящие для взаимодействия такого составного беспилотного летательного аппарата (не показан) по меньшей мере с одним из модулей 106 стыковки и подходящие для свободного перемещения такого составного беспилотного летательного аппарата (не показан) по воздуху, воде и/или суше. Так, составной беспилотный летательный аппарат может представлять собой конструкцию в виде зонта или парашюта, образованную из соединенных между собой беспилотных летательных аппаратов 200, при этом такой составной беспилотный летательный аппарат (не показан) может реагировать на управляющие команды или инструкции как единое целое, т.е. работа беспилотных летательных аппаратов 200 в таком составном беспилотном летательном аппарате может быть синхронизирована (например, с помощью модуля управления транспортного средства 100, парковочной станции 400 или сервера 600). Кроме того, беспилотные летательные аппараты 200, образующие такой составной беспилотный летательный аппарат (не показан), могут быть электрически соединены друг с другом с образованием единой схемы питания и составного источника питания (например, может быть образован из аккумуляторных батарей соединяемых между собой беспилотных летательных аппаратов 200), подающего питание или питающего все указанные беспилотные летательные аппараты 200 по существу одновременно, что позволяет говорить о запасе хода не каждого такого беспилотного летательного аппарата 200 в отдельности, а о запасе хода составного беспилотного летательного аппарата (не показан) в целом. Следует также отметить, процесс взаимного механического соединения беспилотных летательных аппаратов 200 может быть начат или запущен в ответ на управляющие команды, выданные модулем управления транспортного средства 100 или сервером 600 на указанные беспилотные летательные аппараты 200. Следует отметить, что взаимное механическое соединение между беспилотными летательными аппаратами 200, образующими составной беспилотный летательный аппарат (не показан), может быть реализовано как непосредственно между корпусами или телами соединяемых беспилотных летательных аппаратов 200, так и посредством соединительной конструкции, которая может быть выполнена, например, в виде стационарной конструкции, жестко скрепленной с фюзеляжем 102 (например, с использованием крепежных средств, известных в уровне техники, или с использованием по меньшей мере одного из модулей 106 стыковки) или частично вделанной в него или которая может быть выполнена в виде раздвижной, выдвижной или развертываемой по воздуху, воде и/или суше, выполненной с возможностью соединения с фюзеляжем 102 с использованием меньшей мере одного из модулей 106 стыковки. Следует также отметить, что вышеописанный составной беспилотный летательный аппарат (не показан) может быть образован из беспилотных летательных аппаратов 200, выпущенных из модуля 104 хранения того же самого транспортного средства 100, беспилотных летательных аппаратов 200, выпущенных из модулей 104 хранения по меньшей мере одного другого транспортного средства 100, и/или беспилотных летательных аппаратов 200, направленных к транспортному средству 100 по меньшей мере из одной парковочной станции 400. В одной из разновидностей данного варианта реализации настоящего изобретения составной перемещение транспортного средства 100 может осуществлять составной беспилотный летательный аппарат (не показан), соединенный с фюзеляжем 102 в этом транспортном средстве 100, при этом при разрядке указанный составной беспилотный летательный аппарат (не показан) может быть заменен на другой (заряженный) составной беспилотный летательный аппарат в процессе перемещения транспортного средства 100 по воздуху, воде и/или суше или же при остановке транспортного средства 100 (например, при его посадке или приземлении, в том числе в соответствии с его маршрутом следования). При замене разряженного составного беспилотного летательного аппарата (не показан) на заряженный составной беспилотный летательный аппарат беспилотные летательные аппараты 200, входящие в состав составного беспилотного летательного аппарата (не показан), отсоединенного от фюзеляжа 102, могут быть направлены в модуль 104 хранения того же самого транспортного средства 100, модуль 104 хранения другого транспортного средства 100 и/или по меньшей мере на одной из парковочных станций 400.
Количество беспилотных летательных аппаратов 200, соединенных с фюзеляжем 102 перед взлетом транспортного средства 100, во время перемещения транспортного средства 100 по воздуху, воде и/или суше (например, во время его полета) или после остановки транспортного средства 100 (например, после его посадки или приземления), может составлять от двух и более единиц, при этом в отдельных вариантах реализации настоящего изобретения количество беспилотных летательных аппаратов 200, соединенных с фюзеляжем 102, может составлять несколько единиц, несколько десятков единиц или даже несколько сотен единиц. Для обеспечения требуемой грузоподъемности может быть использовано множество беспилотных летательных аппаратов 200 с одинаковой грузоподъемностью или разной грузоподъемностью, однако суммарная грузоподъемность, обеспечиваемая этими беспилотными летательными аппаратами 200, должна соответствовать указанной требуемой грузоподъемности. Беспилотные летательные аппараты 200, соединяемые с фюзеляжем 102, могут как совпадать, так и отличаться по конструкции.
В одном из вариантов реализации настоящего изобретения по меньшей мере один из беспилотных летательных аппаратов 200, размещенных в модуле 104 хранения в транспортном средстве 100, может быть снабжен тяговым сцепным элементом 108, выполненным с возможностью разъемного взаимодействия с модулем 106 стыковки.
В другом варианте реализации настоящего изобретения модуль 106 стыковки может быть размещен с внешней стороны фюзеляжа 102 с обеспечением возможности разъемного сцепления множества беспилотных летательных аппаратов 200 с соответствующими тяговыми сцепными элементами, что обеспечивает их соединение с фюзеляжем 102. Отдельные тяговые сцепные элементы 108 в транспортном средстве 100 могут по меньшей мере частично находиться внутри фюзеляжа 102, при этом они могут быть выдвинуты или вытянуты из фюзеляжа 102 с использованием соответственно выдвижного или вытягивающего механизма, находящегося под управлением модуля управления.
В ином варианте реализации настоящего изобретения модуль 106 стыковки может иметь два и более стыковочных мест, обеспечивающих возможность по существу одновременного размещения в них беспилотных летательных аппаратов 200, которые необходимо соединить с фюзеляжем 102, с последующим по существу одновременным сцеплением с соответствующими тяговыми сцепными элементами 108 и, следовательно, последующим по существу одновременным взлетом вместе с этими тяговыми сцепными элементами 108.
В некотором ином варианте реализации настоящего изобретения модуль 106 стыковки может иметь только одно стыковочное место, так что модуль 106 стыковки может быть выполнен с возможностью единовременного размещения только одного беспилотного летательного аппарата 200 в стыковочном месте модуля 106 стыковки для сцепления с тяговым сцепным элементом 108 и последующим взлетом вместе с этим тяговым сцепным элементом 108, при этом в указанном стыковочном месте модуля 106 стыковки могут быть последовательно размещены второй и последующие беспилотные летательные аппараты 200, каждый из которых в дальнейшем будет прицеплен к свободному тяговому сцепному элементу 108 с последующим взлетом вместе с этим тяговым сцепным элементом 108. В данном варианте реализации настоящего изобретения отсоединение одного или нескольких беспилотных летательных аппаратов 200 от фюзеляжа 102 может быть осуществлено как в обратном порядке путем последовательного размещения отсоединяемых беспилотных летательных аппаратов 200 в стыковочном месте, так и иным образом. В частности, специалисту в данном области техники должно быть очевидно, что для отцепления беспилотного летательного аппарата 200 от тягового сцепного элемента 108 не обязательно может требоваться размещение беспилотного летательного аппарата 200 в стыковочном месте модуля 106 стыковки, при этом указанный беспилотный летательный аппарат 200 может быть отцеплен от тягового сцепного элемента 108 при нахождении последнего в вытянутом состоянии, а возврат тягового сцепного элемента 108 в исходное положение может осуществляться модулем 106 стыковки после отцепления беспилотного летательного аппарата 200 от тягового сцепного элемента 108, например с использованием возвратной пружины, возвратных электромеханических средств, возвратных электромагнитных средств и т.п.
В других вариантах реализации настоящего изобретения модуль 106 стыковки может быть выполнен с возможностью единовременного размещения двух и более беспилотных летательных аппаратов в стыковочном месте для прицепления всех к одному и тому же свободному тяговому сцепному элементу 108 или прицепления каждого к одному из свободных тяговых сцепных элементов 108. Таким образом, в этих вариантах реализации настоящего изобретения предусмотрена возможность единовременного размещения двух или более беспилотных летательных аппаратов 200 в стыковочном месте с последующим их сцеплением с одним тяговым сцепным элементом 108 или соответствующими тяговыми сцепными элементами 108 и совместным взлетом. Кроме того, в этих вариантах реализации настоящего изобретения в стыковочном месте модуля 106 стыковки могут быть последовательно размещены следующие два или более беспилотных летательных аппаратов 200, которые в дальнейшем будут сцеплены все с одним и тем же свободным тяговым сцепным элементом 108 или сцеплены каждый с одним из свободных тяговых сцепных элементов 108 и, следовательно, будут осуществлять совместный взлет. Отцепление одного или нескольких беспилотных летательных аппаратов 200 может осуществляться как в обратном порядке путем последовательного размещения в стыковочном месте, так и иным образом. В частности, для специалиста в данной области техники должно быть очевидно, что для отцепления беспилотного летательного аппарата 200 от тягового сцепного элемента 108 не обязательно может требоваться размещение беспилотного летательного аппарата 200 в стыковочном месте модуля 106 стыковки, поскольку беспилотный летательный аппарат 200 может быть отцеплен от тягового сцепного элемента 108 при нахождении этого тягового сцепного элемента 108 в вытянутом состоянии, а возврат тягового сцепного элемента 108 в исходное положение может осуществляться модулем 106 стыковки после отцепления беспилотного летательного аппарата 200 от тягового сцепного элемента 108, например с использованием возвратной пружины, возвратных электромеханических средств, возвратных электромагнитных средств и т.п.
Иллюстративные примеры неограничивающих вариантов исполнения тяговых сцепных элементов 108 описаны далее со ссылкой на фиг. 1, 2, 3a, 3b и 4.
Как показано на фиг. 1-2, тяговый сцепной элемент 108 может быть выполнен с возможностью изменения длины или степени его выпуска/выдвижения.
Как показано на фиг. 1, модуль 106 стыковки по меньшей мере частично вделан или встроен в фюзеляж 102 и содержит тяговые сцепные элементы 108, снабженные каждый сцепным механизмом 110 и выполненные каждый с возможностью разъемного сцепления по меньшей мере с одним из беспилотных летательных аппаратов 200 с обеспечением вытягивания указанного тягового сцепного элемента 108 из фюзеляжа 102. Другими словами, в транспортном средстве 100, показанном на фиг. 1, каждый тяговый сцепной элемент 108 может быть выполнен вытяжным.
В одном из вариантов реализации настоящего изобретения модуль 106 стыковки в транспортном средстве 100, показанном на фиг. 1, может дополнительно содержать устройство регулировки длины выпуска тягового сцепного элемента или устройство блокировки и разблокировки выпуска тягового сцепного элемента, которое может регулировать или задавать длину выпуска тягового сцепного элемента 108 и которое может находиться под управлением модуля управления (не показан), при этом беспилотный летательный аппарат 200, после его прицепления к тяговому сцепному элементу 108, может быть выполнен с возможностью взлета и вытягивания тягового сцепного элемента 108 на заданную длину, установленную с помощью указанного устройства блокировки и разблокировки выпуска тягового сцепного элемента. За счет возможности задания или изменения длины выпуска тягового сцепного элемента 108 беспилотные летательные аппараты 200, введенные во взаимодействие с модулем 106 сцепления, могут быть расположены на разном расстоянии от фюзеляжа 102, а после отцепления каждого беспилотного летательного аппарата 200 от тягового сцепного элемента 108 последний может быть возвращен в свое исходное положение с помощью возвратного механизма, установленного в модуле 16 стыковки, и, следовательно, станет снова доступным в стыковочном месте для прицепления к нему другого беспилотного летательного аппарата 200 (т.е. получит статус свободного тягового сцепного элемента 108).
Как показано на фиг. 2, модуль 106 стыковки по меньшей мере частично вделан или встроен в фюзеляж 102 и содержит тяговые сцепные элементы 108, снабженные каждый сцепным механизмом 110 и выполненные с возможностью выдвижения из фюзеляжа 102 с обеспечением возможности разъемного сцепления по меньшей мере с одним из беспилотных летательных аппаратов 200, при этом модуль управления может быть дополнительно выполнен с возможностью управления выдвижением указанных тяговых сцепных элементов 108 в модуле 106 стыковки. Другими словами, в транспортном средстве 100, показанном на фиг. 1, тяговый сцепной элемент 108 может быть выполнен выдвижным.
В одном из вариантов реализации настоящего изобретения модуль 106 стыковки в транспортном средстве 100, показанном на фиг. 2, может дополнительно содержать устройство регулировки длины выпуска тягового сцепного элемента или устройство блокировки и разблокировки выпуска тягового сцепного элемента, которое может регулировать или задавать длину выпуска тягового сцепного элемента 108 и которое может находиться под управлением модуля управления (не показан). За счет возможности задания или изменения длины выпуска тягового сцепного элемента 108 беспилотные летательные аппараты 200, после их прицепления к тяговому сцепному элементу 108, могут взлетать с обеспечением выдвижения этого тягового сцепного элемента 108 на заданную длину, ограниченную устройством блокировки и разблокировки выпуска тягового сцепного элемента, из фюзеляжа 102. В одном из вариантов реализации в транспортном средстве 100, показанном на фиг. 2, выдвигаемый тяговый сцепной элемент 108 может поднимать, посредством устройства блокировки и разблокировки выпуска тягового сцепного элемента, беспилотный летательный аппарат 200 в заданное положение относительно фюзеляжа 102 (т.е. в положение, удаленное от фюзеляжа 102 на заданное расстояние), а после отцепления каждого беспилотного летательного аппарата 200 от тягового сцепного элемента 108 последний может быть возвращен в свое исходное положение с помощью того же устройства блокировки и разблокировки выпуска тягового сцепного элемента и, следовательно, станет снова доступным в стыковочном месте для прицепления к нему другого беспилотного летательного аппарата 200 (т.е. получит статус свободного тягового сцепного элемента 108).
В другом варианте реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100, показанном на фиг. 2, может быть дополнительно снабжен устройством обнаружения (не показано), выполненным с возможностью выявления или обнаружения в области действия по меньшей мере одного из беспилотных летательных аппаратов, который должен быть пристыкован к соответствующему одному из тяговых сцепных элементов 108. В таком варианте реализации настоящего изобретения устройство обнаружения (не показано) может быть дополнительно соединено с модулем управления (не показан) с возможностью выдачи на него данных об обнаруженных беспилотных летательных аппаратах, попавших в поле зону его действия, а модуль управления в свою очередь может быть дополнительно обеспечивает возможность приведения (например, посредством выдвигающего механизма, управляемого модулем управления) в действие по меньшей мере одного из выдвижных тяговых сцепных элементов 8 в ответ на указанные данные об обнаруженных беспилотных летательных аппаратах с обеспечением возможности выдвижения указанного приведенного в действие тягового сцепного элемента 108 из фюзеляжа 102. Следует отметить, что в данном варианте реализации настоящего изобретения в качестве устройства обнаружения может быть использована фотокамера, видеокамера, лидар, радар, ИК-сенсор, УЗ-датчик, RFID-метка и т.п. Следует отметить, что в данном варианте реализации настоящего изобретения к беспилотным летательным аппаратам 200, которые может обнаружить устройство обнаружения (не показано) в свой зоне действия, могут относиться беспилотные летательные аппараты 200, выпущенные из модуля 104 стыковки, беспилотные летательные аппараты 200 из парковочных станций 400, беспилотные летательные аппараты 200 из модулей 104 стыковки других транспортных средств 100 и/или любые иные беспилотные летательные аппараты, которые могут быть направлены к транспортному средству 100 в рамках предлагаемой технологии, описанной в данном документе. В одной из разновидностей данного варианта реализации настоящего изобретения устройство обнаружения может быть выполнено в виде устройства фиксации изображений, выполненного с возможностью фиксации изображений в поле обзора в реальном времени с обеспечением возможности выявления в указанном поле обзора по меньшей мере одного из беспилотных летательных аппаратов, который должен быть пристыкован к соответствующему одному из тяговых сцепных элементов 108, и возможности выдачи на модуль управления данных о выявленных беспилотных летательных аппаратах, попавших в поле обзора указанного устройства фиксации изображений, при этом в качестве такого устройства фиксации изображений может быть использована фотокамера, видеокамера, видеорегистратор, видеорадар и т.п.
Как показано на фиг. 3a и 3b, модуль 106 стыковки по меньшей мере частично вделан или встроен в фюзеляж 102 и представляет собой выдвижную сцепную конструкцию, снабженную тяговыми сцепными элементами 108, снабженными каждый сцепным механизмом 110 и выполненными каждый с возможностью их разъемного сцепления по меньшей мере с одним из беспилотных летательных аппаратов 200, при этом указанная выдвижная сцепная конструкция выполнена с возможностью ее по меньшей мере частичного выдвижения из фюзеляжа 102 под управлением модуля управления с обеспечением возможности высвобождения тяговых сцепных элементов 108 в зависимости от степени выдвижения. Другими словами, чем больше степень выдвижения выдвижной сцепной конструкции в транспортном средстве 100, показанном на фиг. 3a и 3b, тем большее количество свободных тяговых сцепных элементов 108 оказываются доступными для прицепления к ним беспилотных летательных аппаратов 200. Модуль управления в транспортном средстве 100, показанном на фиг. 3a и 3b, дополнительно выполнен с возможностью управления работой выдвижной сцепной конструкции посредством выдвигающего механизма, управляемого модулем управления, что обеспечивает возможность регулирования степени ее выдвижения.
После полного выдвижения выдвижной сцепной конструкции, показанного на фиг. 3a, эта выдвижная сцепная конструкция может быть дополнительно выполнена с возможностью ее по меньшей мере частичного развертывания с обеспечением возможности удаления высвобожденных тяговых сцепных элементов 108 друг от друга на расстояние, зависящее от степени развертывания, что улучшает доступ к указанным тяговым сцепным элементам 108 для сцепления с ними беспилотных летательных аппаратов 200, при этом модуль управления дополнительно выполнен с возможностью управления развертыванием указанной сцепной конструкции посредством развертывающего механизма, управляемого модулем управления, что позволяет модулю управления регулировать степень развертывания сцепной конструкции в диапазоне от частично развернутой до полностью развернутой или возвращать эту сцепную конструкцию из развернутого состояния обратно в сложенное состояние, в котором она находится при ее полном или частичном выдвижении из фюзеляжа 102. В частности, на фиг. 3b выдвижная сцепная конструкция показана в полностью развернутом виде.
В одном из вариантов реализации настоящего изобретения после полного выдвижения выдвижной сцепной конструкции, показанного на фиг. 3a, эта выдвижная сцепная конструкция может быть дополнительно выполнена с возможностью ее по меньшей мере частичного раздвижения с обеспечением возможности удаления высвобожденных тяговых сцепных элементов 108 друг от друга на расстояние, зависящее от степени раздвижения, что улучшает доступ к указанным тяговым сцепным элементам 108 для сцепления с ними беспилотных летательных аппаратов 200, при этом модуль управления дополнительно выполнен с возможностью управления раздвижением указанной сцепной конструкции посредством раздвигающего механизма, управляемого модулем управления, что позволяет модулю управления регулировать степень раздвижения сцепной конструкции в диапазоне от частично раздвинутой до полностью раздвинутой или возвращать эту сцепную конструкцию из раздвинутого состояния обратно в сложенное или сомкнутое состояние, в котором она находится при ее полном или частичном выдвижении из фюзеляжа 102. Следует отметить, что конструкция раздвижного механизма, используемого для раздвижения сцепной конструкции, никак конкретно не ограничена, при этом этот раздвижной механизм может представлять собой, например, шарнирную конструкцию, по существу схожую со складным зонтом, обеспечивающую компактность в сложенном или сомкнутом состоянии и выполненную с возможностью трансформации в объемную каркасную конструкцию, снабженную множеством тяговых сцепных элементов 108 для прицепления к ним беспилотных летательных аппаратов 200, при этом взаимное положение беспилотных летательных аппаратов 200 друг относительно друга может обеспечиваться не только системой их позиционирования, но и конструкцией тягового сцепного элемента 108. Модуль 106 стыковки может быть выполнен с возможностью регулирования длины и ширины раздвижения тягового сцепного элемента 108 при изменении его состояния из сложенного или сомкнутого состояния в разложенное или раздвинутое состояние, а также может содержать одно или несколько промежуточных положений для различных конфигураций подключения беспилотных летательных аппаратов 200.
Как показано на фиг. 4, фюзеляж 102 снабжен двумя модулями 106 стыковки, вделанными или встроенными в фюзеляж 102. В частности, фюзеляж 102 в транспортном устройстве 100, показанном на фиг. 4, содержит модуль 106-1 стыковки, выполненный аналогично модулю 106 стыковки, показанному на фиг. 1, и содержит модуль 106-2 стыковки, выполненный аналогично модулю 106 стыковки, показанному на фиг. 2. В частности, фюзеляж 102 в транспортном устройстве 100, показанном на фиг. 4, содержит множество тяговых сцепных элементов 108, содержащее первую группу тяговых сцепных элементов 108-1 и вторую группу тяговых сцепных элементов 108-2 (см. фиг. 4), в каждой из которой тяговые сцепные элементы 108 снабжены каждый сцепным механизмом 110.
В одном из вариантов реализации настоящего изобретения в транспортном устройстве 100, показанном на фиг. 4, длина тяговых сцепных элементов 108-1 из первой группы в полностью выпущенном состоянии меньше длины тяговых сцепных элементов 108-2 из второй группы в полностью развернутом или раздвинутом состоянии, что по сути позволяет соединить беспилотные летательные аппараты 200 с фюзеляжем 102 таким образом, что они находятся на разных уровнях по высоте относительно фюзеляжа 102 или удалены от фюзеляжа на разные расстояния. В одной из разновидностей данного варианта реализации настоящего изобретения в транспортном устройстве 100, показанном на фиг. 4, количество и/или конструкция тяговых сцепных элементов 108-1 из первой группы и тяговых сцепных элементов 108-2 могут совпадать друг с другом.
Следует отметить, что каждый тяговый сцепной элемент 108 в модулях 106 стыковки, показанных на фиг. 1-4, может содержать один или более сцепных механизмов 110, каждый из которых выполнен с возможностью разъемного соединения с одним или несколькими беспилотными летательными аппаратами 200. Неограничивающими примерами сцепного механизма 110 могут являться различные подходящие механические соединительные или крепежные средства (кронштейны, захваты, крепежи, монтажные пазы, зацепы, крюки, защелки и т.д.), электромеханические средства под управлением модуля управления (например, электромеханические средства стыковки для стыковки ответным пристыковываемым элементом, электромеханические средства захвата для захвата ответного захватываемого элемента, или т.п.), электромагнитные средства под управлением модуля управления, магнитные средства, вакуумные захваты под управлением модуля управления и/или т.д. Сцепной механизм 110 выполнен с возможностью взаимодействия (т.е. присоединения, прикрепления, примагничивания и т.п.) к соответствующей ответной крепежной части, которой должен быть снабжен беспилотный летательный аппарат 200, для обеспечения разъемного соединения между беспилотным летательным аппаратом 200 и модулем 106 стыковки. В контексте настоящего изобретения сцепной механизм 110, средство для разъемного соединения и средство разъемного крепления могут совпадать по конструкции и/или по меньшей мере частично отличаться. В одном из вариантов реализации настоящего изобретения сцепной механизм 110 может представлять собой универсальный сцепной механизм, образованный в виде комбинации одного или нескольких из механических крепежных средств, электромеханических средств, электромагнитных средств, магнитных средств и/или вакуумных средств крепления или захватов, при этом такой универсальный сцепной механизм может быть выполнен с возможностью разъемного соединения с различными видами средств разъемного соединения, которыми могут быть снабжены различные беспилотные летательные аппараты 200.
Следует отметить, что тяговый сцепной элемент 108 может быть выполнен в виде троса (см. фиг. 1), один конец которого жестко связан с модулем 106 стыковки на фюзеляже 102, а на другом конце которого установлен сцепной механизм 110, выполненный с возможностью разъемного сцепления с беспилотным летательным аппаратом 200. Кроме того, тяговый сцепной элемент 108 может быть выполнен и в виде телескопического стержня (см. фиг. 2), один конец которого жестко связан с модулем 106 стыковки на фюзеляже 102, а на другом конце которого установлен сцепной механизм 110, выполненный с возможностью разъемного сцепления с беспилотным летательным аппаратом 200. В одном из вариантов реализации настоящего изобретения тяговый сцепной элемент 108 может быть выполнен в виде раздвижной многозвенной конструкции, выполненной с возможностью изменения своих геометрической формы и габаритных размеров.
В другом варианте реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть снабжен двумя и более модулями 106 стыковки, размещенными на расстоянии друг от друга, и может быть снабжен двумя и более датчиками веса (не показаны), а модуль управления (не показан) может быть выполнен с возможностью установления распределения полезной нагрузки в фюзеляже 102 на основании показаний указанных тензодатчиков и дополнительно выполнен с возможностью выдачи управляющих инструкций на беспилотные летательные аппараты 200 с обеспечением возможности взаимодействия с соответствующими модулями 106 стыковки в зависимости от установленного распределения полезной нагрузки в фюзеляже 106. В одной из разновидностей данного варианта реализации настоящего изобретения тензодатчики (не показаны), которыми может быть снабжен фюзеляж 102, могут быть выполнены, например, на полу, стенке или иной конструктивной части фюзеляжа 102, а на шасси, которым может быть снабжен фюзеляж 102. В другой разновидности данного варианта реализации настоящего изобретения тензодатчики (не показаны), которыми может быть снабжен фюзеляж 102, могут быть вделаны или встроены в пассажирские кресла, кресло пилота, полки для груза, коробки или ящики для груза и/или т.п. Следует отметить, что в качестве каждого из датчиков веса (не показаны) может быть использован датчик веса любого типа, в частности тензометрический датчик или датчик силы, выполненный с возможностью измерения веса, на основе любого иного подходящего физического принципа, например оптический датчик силы или пьезоэлектрический датчик силы.
В ином варианте реализации настоящего изобретения модуль 106 стыковки в транспортном средстве 100 может представлять собой стыковочную конструкцию, содержащую посадочные площадки (не показаны), при этом каждый из тяговых сцепных элементов 108 может быть установлен на одной из указанных посадочных площадок, а модуль управления (не показан) может быть дополнительно выполнен с возможностью управления работой каждого из указанных тяговых сцепных элементов 108 с обеспечением возможности приведения его в действие при размещении беспилотного летательного аппарата 200 на указанной посадочной площадке, соответствующей указанному тяговому сцепному элементу 108, или в зоне или области стыковки, соответствующей указанной посадочной площадке.
В некотором другом варианте реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен роботизированным манипулятором (не показан), находящимся под управлением модуля управления (не показан) и выполненным с возможностью захвата по меньшей мере одного из беспилотных летательных аппаратов 200 с обеспечением возможности размещения каждого из указанных захваченных беспилотных летательных аппаратов 200 на одной из указанных посадочных площадок. В одной из разновидностей данного варианта реализации фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен устройством фиксации изображений (не показана), выполненным с возможностью фиксации изображений в поле обзора в реальном времени с обеспечением возможности выявления по меньшей мере одного из беспилотных летательных аппаратов 200, выпущенных из модуля 104 хранения, в указанном поле обзора и дополнительно соединенным с модулем управления (не показан) с возможностью выдачи на него данных о выявленных беспилотных летательных аппаратах, а модуль управления может быть дополнительно выполнен с возможностью приведения в действие роботизированного манипулятора (не показан) в ответ на указанные данные о выявленных беспилотных летательных аппаратах с обеспечением возможности захвата по меньшей мере одного из указанных выявленных беспилотных летательных аппаратов 200. Следует отметить, что в данном варианте реализации настоящего изобретения в качестве такого устройства фиксации изображений может быть использована фотокамера, видеокамера, видеорегистратор, видеорадар или т.п. Следует также отметить, что в данном варианте реализации настоящего изобретения к беспилотным летательным аппаратам 200, захватываемых роботизированным манипулятором, могут относиться беспилотные летательные аппараты 200, выпущенные из модуля 104 стыковки, беспилотные летательные аппараты 200 из парковочных станций 400, беспилотные летательные аппараты 200 из модулей 104 стыковки других транспортных средств 100 и/или любые иные беспилотные летательные аппараты, которые могут быть направлены к транспортному средству 100 в рамках предлагаемой технологии, описанной в данном документе.
Еще в одном варианте реализации настоящего изобретения модуль стыковки в транспортном средстве 100 может представлять собой захват (не показан), находящийся под управлением модуля управления (не показан), при этом фюзеляж 102 может быть дополнительно снабжен устройством фиксации изображений (не показано), выполненным с возможностью фиксации изображений в поле обзора в реальном времени с обеспечением возможности выявления по меньшей мере одного из беспилотных летательных аппаратов 200 в указанном поле обзора и дополнительно соединенным с модулем управления с возможностью выдачи на него данных о выявленных беспилотных летательных аппаратах, а модуль управления в свою может быть дополнительно выполнен с возможностью приведения в действие захвата в ответ на указанные данные о выявленных беспилотных летательных аппаратах с обеспечением возможности разъемного захвата указанного выявленного беспилотного летательного аппарата 200. Следует отметить, что в данном варианте реализации настоящего изобретения в качестве такого устройства фиксации изображений может быть использована фотокамера, видеокамера, видеорегистратор, видеорадар или т.п. Следует также отметить, что в данном варианте реализации настоящего изобретения к беспилотным летательным аппаратам 200, захватываемых роботизированным манипулятором, могут относиться беспилотные летательные аппараты 200, выпущенные из модуля 104 стыковки, беспилотные летательные аппараты 200 из парковочных станций 400, беспилотные летательные аппараты 200 из модулей 104 стыковки других транспортных средств 100 и/или любые иные беспилотные летательные аппараты, которые могут быть направлены к транспортному средству 100 в рамках предлагаемой технологии, описанной в данном документе.
Как показано на фиг. 1, модуль 104 хранения для хранения беспилотных летательных аппаратов представляет собой стойку, закрепленную на фюзеляже 102 с его внешней стороны и выполненную с возможностью съемного насаживания на нее беспилотных летательных аппаратов 200 в последовательном порядке (т.е. по очереди или друг за другом), в результате чего насаженные на стойку беспилотные летательные аппараты 200 оказываются расположенными друг над другом по вертикали с образованием стопы (пачка из беспилотных летательных аппаратов 200, уложенных друга на друга по вертикали с обеспечением их взаимного последовательного скрепления или без него). Следует отметить, что стойка представляет собой трубку или стержень с любой формой поперечного сечения, на который могут быть надеты или насажены друг за другом беспилотные летательные аппараты 200, которые необходимо разместить в модуле 104 хранения, при этом в корпусе или теле таких насаживаемых на стойку беспилотных летательных аппаратов 200 должно быть выполнено сквозное отверстие, форма и размеры которого должны соответствовать стойке в ее поперечном размере, или должен быть предусмотрен кольцеобразный кронштейн для обеспечения возможности прохождения стойки через тело каждого беспилотного летательного аппарата 200 при его насаживании на стойку. Например, стойка может представлять собой профиль с круглым сечением, на который могут быть последовательно надеты или насажены беспилотные летательные аппараты 200. Беспилотные летательные аппараты 200 могут быть удалены или сняты со стойки путем выполнения вышеописанных операций, связанных с насаживанием беспилотных летательных аппаратов 200 на стойку, в обратном порядке. В частности, для удаления или снятия беспилотных летательных аппаратов 200 со стойки, показанной на фиг. 1, для их последующего направления в целевое место беспилотные летательные аппараты 200 могут осуществить последовательный взлет (т.е. по одному, начиная с самого верхнего по вертикали беспилотного летательного аппарата 200, или по группе из функционально соединенных между собой беспилотных летательных аппаратов 200, начиная с самой верхней по вертикале группы таких беспилотных летательных аппаратов 200) с обеспечением выхода из взаимодействия со стойкой при достижении высоты полета, превышающей длину стойки, и с последующим вылетом из модуля 104 хранения (т.е. за пределы модуля 104 хранения на расстояние от него, достаточное для вылета из модуля 104 хранения каждого следующего беспилотного летательного аппарата).
В одном из вариантов реализации настоящего изобретения модуль 104 хранения для хранения беспилотных летательных аппаратов в транспортном средстве 100, показанном на фиг. 1, может содержать по меньшей мере одну дополнительную стойку (не показана), установленную на фюзеляже 102 и выполненную с возможностью съемного насаживания на нее беспилотных летательных аппаратов 200 в последовательном порядке (т.е. по очереди или друг за другом), при этом основная стойка и дополнительная стойка могут иметь габаритные размеры, форму, конструкцию и/или профили, совпадающие друг с другом или отличающиеся друг от друга. В другом варианте реализации настоящего изобретения модуль 104 хранения может содержать две и более стоек, при этом габаритные размеры, форма, конструкция и/или профили таких стоек могут как совпадать, так и отличаться друг от друга. В частности, разные стойки могут быть предназначены как для хранения просто большего количества беспилотных летательных аппаратов 200, так и для хранения беспилотных летательных аппаратов 200 разных модификаций и/или разных габаритных размеров.
Как показано на фиг. 2, модуль 104 хранения для хранения беспилотных летательных аппаратов представляет собой открытую площадку, расположенную на фюзеляже 102 и выполненную с возможностью последовательного (т.е. по очереди или друг за другом) размещения на ней беспилотных летательных аппаратов 200, в результате чего размещаемые на площадке беспилотные летательные аппараты 200 оказываются расположенными друг над другом по вертикали с образованием стопы. Следует отметить, что площадка, показанная на фиг. 2, может быть оборудована, например, крепежным средством (не показано) для съемного закрепления одного или нескольких беспилотных летательных аппаратов 200 на указанной площадке, при этом указанное крепежное может быть реализовано, например, в виде механического крепежного средства, электромеханического средства, электромагнитного средства, магнитного средства, вакуумного захвата или т.п.
В некоторых неограничивающих вариантах реализации настоящего изобретения беспилотные летательные аппараты 200 могут содержать аналогичные разъемные крепления на своих корпусах для разъемного соединения беспилотных летательных аппаратов 200 друг с другом. В таких вариантах реализации настоящего изобретения первый беспилотный летательный аппарат 200 может приземлиться на площадку с обеспечением его закрепления на этой площадке, а второй беспилотный летательный аппарат 200 может приземляться на первый беспилотный летательный аппарат 200 и закрепляться на нем и т.д. с обеспечением последовательного соединения множества таких беспилотных летательных аппаратов 200 на одной и той же площадке. Для выпуска или высвобождения беспилотных летательных аппаратов 200 из такой площадки беспилотные летательные аппараты 200 могут последовательно или поочередно отсоединяться от площадки, начиная с самого верхнего беспилотного летательного аппарата 200, путем выхода из взаимодействия с крепежными средствами площадки и осуществления взлета на высоту полета, находящуюся за пределами площадки. В одной из разновидностей данного варианта реализации настоящего изобретения для выпуска или высвобождения беспилотных летательных аппаратов 200 из такой площадки беспилотные летательные аппараты 200 могут одновременно группой осуществить взлет на высоту полета, находящуюся за пределами площадки, с последующим отсоединением друг от друга в воздухе с получением отдельных или независимых беспилотных летательных аппаратов 200.
Как показано на фиг. 3a и 3b, модуль 104 хранения для хранения беспилотных летательных аппаратов представляет собой модуль хранения с выдвижной площадкой, размещенный внутри фюзеляжа 102 и выполненный таким образом, что он обеспечивает возможность посадки беспилотных летательных аппаратов 200 на указанную площадку с внешней стороны фюзеляжа 102, возможность взлета беспилотных летательных аппаратов 200 с указанной площадки с вылетом за пределы фюзеляжа 102, а также возможность размещения совершивших посадку беспилотных летательных аппаратов 200 внутри фюзеляжа 102 и возможность извлечения ранее размещенных беспилотных летательных аппаратов 200 из фюзеляжа 102. Следует отметить, что модуль хранения с выдвижной площадкой в транспортном средстве, показанном на фиг. 3a и 3b, может представлять собой отсек или группу отсеков для временного хранения множества беспилотных летательных аппаратов 200. Каждая такая выдвижная площадка может быть использована для приземления на нее или размещения на ней одного беспилотного летательного аппарата 200 с обеспечением возможности его последующего размещения внутри модуля хранения 104 или может обеспечивать возможность поочередного приземления и размещения нескольких беспилотных летательных аппаратов 200 в модуле хранения 104. Извлечение беспилотных летательных аппаратов 200 из модуля хранения с выдвижной площадкой может осуществляться в обратном порядке, а именно может быть начато с извлечения выдвижной площадки с беспилотным летательным аппаратом 200 из фюзеляжа 102 и взлетом последнего с этой извлеченной площадки.
В одном из вариантов реализации настоящего изобретения модуль 104 хранения для хранения беспилотных летательных аппаратов может представлять собой модуль хранения в виде емкости с проемом, размещенный внутри фюзеляжа 102 и имеющий размер указанного проема, обеспечивающий возможность прохождения через него беспилотных летательных аппаратов 200. В данном варианте реализации настоящего изобретения размещение беспилотных летательных аппаратов 200 в модуле 104 хранения и их извлечение из модуля 104 хранения может быть осуществлено в автоматическом режиме за счет сенсоров, системы позиционирования и системы управления и приводов/двигателей каждого беспилотного летательного аппарата 200 соответственно. Так, например, модуль 104 хранения может представлять собой емкость с проемом, в который могут залетать беспилотные летательные аппараты 200 с последующим размещением внутри емкости, при этом указанная емкость может быть образована, например, внутренним пространством фюзеляжа 102. Кроме того, в качестве альтернативы модуль 104 хранения может представлять собой отдельную емкость установленную внутри фюзеляжа 102 или на нем.
В другом варианте реализации настоящего изобретения модуль 104 хранения в транспортном средстве 100 может представлять собой стыковочную стойку, закрепленную на фюзеляже 102 и выполненную с возможностью съемного насаживания на нее беспилотных летательных аппаратов 200 с образованием стопы, при этом фюзеляж 102 может быть дополнительно снабжен роботизированным манипулятором (не показан), находящимся под управлением модуля управления (не показан) и выполненным с возможностью разъемного захвата одного из беспилотных летательных аппаратов 200 с обеспечением возможности его насаживания на стыковочную стойку. Следует отметить, что в данном варианте реализации настоящего изобретения к беспилотным летательным аппаратам 200, захватываемых роботизированным манипулятором (не показан), могут относиться беспилотные летательные аппараты 200, выпущенные из модуля 104 стыковки, беспилотные летательные аппараты 200 из парковочных станций 400, беспилотные летательные аппараты 200 из модулей 104 стыковки других транспортных средств 100 и/или любые иные беспилотные летательные аппараты, которые могут быть направлены к транспортному средству 100 в рамках предлагаемой технологии, описанной в данном документе. В одной из разновидностей данного варианта реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен устройством обнаружения (не показано), выполненным с возможностью обнаружения по меньшей мере одного из беспилотных летательных аппаратов 200, которые должны быть соединены с фюзеляжем 102, в зоне действия и дополнительно соединенным с модулем управления с возможностью выдачи на него данных об обнаруженных беспилотных летательных аппаратах, при этом модуль управления может быть дополнительно выполнен с возможностью приведения в действие роботизированного манипулятора в ответ на указанные данные об обнаруженных беспилотных летательных аппаратах с обеспечением возможности последовательного захвата каждого из указанных выявленных беспилотных летательных аппаратов 200. Следует отметить, что в данном варианте реализации настоящего изобретения в качестве устройства обнаружения может быть использована фотокамера, видеокамера, лидар, радар, ИК-сенсор, УЗ-датчик, RFID-метка и т.п. В другой разновидности данного варианта реализации настоящего изобретения устройство обнаружения может быть выполнено в виде устройства фиксации изображений (не показано), выполненного с возможностью фиксации изображений в поле обзора в реальном времени с обеспечением возможности выявления в указанном поле обзора по меньшей мере одного из беспилотных летательных аппаратов, который должен быть пристыкован к соответствующему одному из тяговых сцепных элементов 108, и возможности выдачи на модуль управления данных о выявленных беспилотных летательных аппаратах, попавших в поле обзора указанного устройства фиксации изображений, при этом в качестве такого устройства фиксации изображений может быть использована фотокамера, видеокамера, видеорегистратор, видеорадар и т.п.
Еще в одном варианте реализации настоящего изобретения модуль управления (не показан) может быть дополнительно выполнен с возможностью приема в реальном времени данных об уровне заряда батареи от каждого из беспилотных летательных аппаратов 200, соединенных с фюзеляжем 102, с обеспечением возможности замены по меньшей мере одного из указанных беспилотных летательных аппаратов 200 по меньшей мере на один из беспилотных летательных аппаратов 200, размещенных в модуле 104 хранения, в случае, если запас заряда каждого заменяемого беспилотного летательного аппарата 200 ниже заданного порогового значения. В частности, возможны случаи, в которых будет выявлено, что только один беспилотный летательный аппарат 200 имеет запас заряда ниже заданного порогового значения, при этом данный разряженный беспилотный летательный аппарат 200 может быть заменен на один или более (например, на один, два, три и т.д.) беспилотных летательных аппаратов 200, размещенных в модуле 104 хранения. Кроме того, возможны случаи, в которых будет выявлено, что только два или более беспилотных летательных аппаратов 200 имеют каждый запас заряда ниже заданного порогового значения, при этом эти разряженные беспилотные летательные аппараты 200 могут быть заменены на один или более (например, на один, два, три, четыре, пять, шесть и т.д.) беспилотных летательных аппаратов 200, размещенных в модуле 104 хранения, или каждый из этих разряженных беспилотных летательных аппаратов 200 может быть заменен на один или более (например, на один, два, три, четыре, пять, шесть и т.д.) беспилотных летательных аппаратов 200, размещенных в модуле 104 хранения. Следует отметить, что количество размещенных в модуле 104 хранения беспилотных летательных аппаратов 200, на которое будет заменен один такого разряженный беспилотный летательный аппарат 200 может зависеть, например, от мощности, запаса хода, модели, размера, типа и т.п., характеризующих указанные беспилотных летательных аппаратов 200 из модуля 104 хранения.
В ином варианте реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть выполнен с возможность размещения в нем полезной нагрузки, при этом пол фюзеляжа 120 может быть снабжен по меньшей мере одним датчиком силы, выполненным с возможностью измерения веса полезной нагрузки, а модуль управления (не показан) может быть соединен с указанным тензодатчиком с возможностью приема от него результата измерения веса полезной нагрузки и может обеспечивать возможность выпуска беспилотных летательных аппаратов 200 из модуля 104 хранения в количестве, зависящем от указанного измеренного веса полезной нагрузки и снаряженного веса транспортного средства 100. Следует отметить, что в качестве каждого из датчиков веса (не показаны) может быть использован датчик веса любого типа, в частности тензометрический датчик или датчик силы, выполненный с возможностью измерения веса, на основе любого иного подходящего физического принципа, например оптический датчик силы или пьезоэлектрический датчик силы.
В некотором другом варианте реализации настоящего изобретения модуль управления (не показан) может быть выполнен с возможностью получения данных об изменении веса полезной нагрузки в фюзеляже 102 на каждой из остановок в соответствии с заданным маршрутом следования и дополнительно выполнен с возможностью приема в реальном времени данных о заряде батареи от каждого из беспилотных летательных аппаратов 200, соединенных с фюзеляжем 102, и каждого из беспилотных летательных аппаратов 200, размещенных в модуле 104 хранения, при этом модуль управления может быть дополнительно выполнен с возможностью выявления географической точки или области в соответствии с маршрутом следования, в которой количество беспилотных летательных аппаратов 200 с запасом хода, позволяющим продолжать перемещение транспортного средства 100 по воздуху, воде и/или суше (например, продолжать осуществлять полет) или после остановки транспортного средства 100 (например, после его посадки или приземления) с указанной измененной полезной нагрузкой, ниже порогового значения, и дополнительно выполнен с возможностью направления запроса по меньшей мере на одну из парковочных станций для хранения беспилотных летательных аппаратов (не показаны), соответствующую указанной выявленной географической точке ил области, для направления по меньшей мере одного дополнительного летательного аппарата (не показан) в указанную географическую точку или область с обеспечением возможности перехода указанного дополнительного летательного аппарата под управление модуля управления для взаимодействия с модулем 106 стыковки.
В некоторых вариантах реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен авиационным двигателем (не показан), находящимся под управлением модуля управления (не показан) и установленным на фюзеляже 102 с обеспечением возможности перемещения транспортного средства 100 по воздуху, воде и/или суше (в частности, для обеспечения возможности его полета), при этом модуль управления может быть дополнительно выполнен с возможностью приема в реальном времени данных о заряде батареи от каждого из беспилотных летательных аппаратов 200, присоединенных к фюзеляжу 102, и каждого из беспилотных летательных аппаратов 200, размещенных в модуле 104 хранения, и дополнительно выполнен с возможностью приведения в действие указанного авиационного двигателя при перемещении транспортного средства 100 в случае выявления, на основании указанных данных о заряде батареи, критического запаса хода для указанного транспортного средства 100, не позволяющего продолжать перемещение транспортного средства 100 в соответствии с маршрутом следования.
В некоторых иных вариантах реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен несущим винтом или движителем (не показаны), выполненным с возможностью перемещения транспортного средства 100 по воздуху, воде и/или суше при приведении его в действие, и может дополнительно содержать по меньшей мере один двигатель (не показан), находящийся под управлением модуля управления (не показан) и функционально соединенный с каждым из указанных несущих винтов или движителей с обеспечением приведения его в действие, при этом модуль управления может быть дополнительно выполнен с возможностью приема в реальном времени данных о заряде батареи от каждого из беспилотных летательных аппаратов 200, присоединенных к фюзеляжу 102, и каждого из беспилотных летательных аппаратов 200, размещенных в модуле 104 хранения, и дополнительно выполнен с возможностью приведения в действие указанного несущего винта или движителя при перемещении транспортного средства 100 в случае выявления, на основании указанных данных о заряде батареи, критического запаса хода для указанного транспортного средства 100, не позволяющего продолжать перемещение транспортного средства 100 в соответствии с маршрутом следования.
В некоторых иных вариантах реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен колесами и может содержать двигатель (не показан), функционально соединенный с колесами с возможностью их привода для перемещения транспортного средства 100, а модуль управления (не показан) может быть дополнительно соединен с указанным двигателем с возможностью приведения его в действие и может быть дополнительно выполнен с возможностью приема в реальном времени данных о заряде батареи от каждого из беспилотных летательных аппаратов 200, присоединенных к фюзеляжу 102, и каждого из беспилотных летательных аппаратов 200, размещенных в модуле 104 хранения, и с возможностью посадки транспортного средства 100 с обеспечением возможности приведения в действие указанного двигателя в случае выявления, на основании указанных данных о заряде батареи, критического запаса хода для указанного транспортного средства 100, не позволяющего продолжать перемещение транспортного средства 100 по воздуху, воде и/или суше в соответствии с маршрутом следования.
Транспортная система
На фиг. 5 схематически показана транспортная система 500, в состав которой могут входить одно или более транспортных средств 100 согласно любому из вышеописанных вариантов его реализации, беспилотные летательные аппараты 200 согласно любому из вышеописанных вариантов их реализации, сервер 300, одна или более парковочных станций 400 и сеть 600 связи, с которой соединены с возможностью обмена данными транспортное средство 100, беспилотные летательные аппараты 200, сервер 300 и парковочные станции 400.
Сеть 600 связи позволяет транспортному средству 100, беспилотным летательным аппаратам 200, серверу 300 и парковочным станциям 400 обмениваться друг с другом системными и/или рабочими данными, которые они используют для выполнения своих функций, описанных в данном документе. В качестве сети 600 связи может быть использована любая подходящая линия беспроводной связи, известная в уровне техники, например линия связи на основе технологии «WiFi», линия связи на основе технологии «2G», «3G», «4G» или «5G», сеть связи на основе технологии «LTE» или т.п.
В одном из вариантов реализации настоящего изобретения в состав транспортной системы 500 могут входить две и более сетей беспроводной связи, выполненных каждая аналогично вышеописанной сети 600 связи, для осуществления обмена данными между транспортными средствами 100, парковочными станциями 400, беспилотными летательными аппаратами 200 и сервером в режиме реального времени или в реальном времени.
Сервер 300, входящий в состав транспортной системы 500, показанной на фиг. 5, выполнен с возможностью получения и обработки данных от транспортных средств 100, беспилотных летательных аппаратов 200 и парковочных станций 400, и возможностью генерирования управляющих команд или инструкций, в том числе навигационных команд, на основании указанных полученных данных и результатов их обработки с обеспечением возможности выдачи или направления таких сгенерированных управляющих инструкций на по меньшей мере на одно из транспортных средств 100, на по меньшей мере на один из беспилотных летательных аппаратов 200 и/или на по меньшей мере на одну из парковочных станций 400, в том числе в ответ на запрос одного из указанных транспортных средств 100, беспилотных летательных аппаратов 200 и парковочных станций 400.
Стоит отметить, что в некоторых вариантах реализации настоящего изобретения протоколы передачи данных и/или технические средства, используемые для передачи данных между сервером 300, транспортными средствами 100, беспилотными летательными аппаратами 200 и парковочными станциями 400 могут по меньшей мере частично отличаться или совпадать. Кроме того, для обмена данными могут быть одновременно использованы один или более протоколов связи и соответствующих технических средств. В частности, в качестве примера, для передачи данных могут быть использованы одно или более средств связи из группы средств связи, содержащей: радиоантенны КВ диапазона, радиоантенны УКВ диапазона, радиоантенны СВЧ диапазона, модуль оптической связи, модуль спутниковой связи полудуплекс/симплекс, модуль сотовой связи 2G/3G/4G/LTE/5G, модуль сетевой беспроводной или проводной связи. В частности, сервер 300 может быть связан с парковочными станциями 400 по беспроводной или проводной сети передачи данных.
Сервер 300 в транспортной системе 500 представляет собой одиночный сервер, который может быть выполнен в виде, например, сервера Dell™ PowerEdge™, на котором может быть использована операционная система Ubuntu Server или Windows Server. В некоторых вариантах реализации настоящего изобретения сервер 300 может представлять собой любое другое подходящее аппаратное и/или прикладное программное, и/или системное программное обеспечение или их комбинацию. В других вариантах реализации настоящего изобретения функции сервера 300 могут быть разделены между несколькими компьютерными устройствами, например могут быть выполнены с помощью нескольких связанных между собой серверов. Кроме того, сервер 300 может иметь доступ по меньшей мере к одной безе данных по сети 600 связи или иным способом, в либо может содержать по меньшей мере одну локальную базу данных, хранящуюся на запоминающем устройстве сервера 300.
В отдельных вариантах реализации настоящего изобретения сервер 300 может быть выполнен с возможностью организации движения и обеспечением безопасности при перемещении транспортных средств 100. В частности, сервер 300 может быть выполнен с возможностью получения данных о текущем или планируемом местоположении по меньшей мере одного транспортного средства 100 и запроса на предоставление беспилотных летательных аппаратов 200. Кроме того, сервер 300 может быть выполнен с возможностью обработки запроса и направления по меньшей мере одного беспилотного летательного аппарата 200 в заданное местоположение конкретного транспортного средства 100 по меньшей мере из одной парковочной станции 400 и/или по меньшей мере из одного другого транспортного средства 100 для осуществления подключения указанных направленных беспилотных летательных аппаратов 200 к конкретному транспортному средству 100 с обеспечением восполнения запаса хода для обеспечения дальнейшего продвижения или перемещения транспортного средства 100 в соответствии с его маршрутом следования.
В других вариантах реализации настоящего изобретения сервер 300 может быть выполнен с возможностью получения данных о маршруте перемещения или следования транспортного средства 100; при этом сервер 300 может быть дополнительно выполнен с возможностью резервирования требуемого количества беспилотных летательных аппаратов 200 на отдельных парковочных станциях 400 по маршруту следования транспортного средства 100; в ответ на достижение транспортным средством 100 географической области, соответствующей по меньшей мере одной парковочной станции 400, сервер 300 может быть дополнительно выполнен с возможностью направления по меньшей мере одного беспилотного летательного аппарата 200 в заданное местоположение транспортного средства 100 с указанной по меньшей мере одной парковочной станции 400 с обеспечением подключения указанного направленного беспилотного летательного аппарата 200 к транспортному средству 100 для обеспечения запаса хода, позволяющего продолжить безостановочное перемещение транспортного средства 100 в соответствии с его маршрутом следования.
В иных вариантах реализации настоящего изобретения сервер 300 может быть дополнительно выполнен с возможностью получения данных о снаряженной массе транспортного средства 100 и/или полезной нагрузке транспортного средства 100 и с возможностью вычисления требуемого количества беспилотных летательных аппаратов 200 с последующим направлением указанного вычисленного количества беспилотных летательных аппаратов 200 в заданное местоположение транспортного средства 100 по меньшей мере из одной парковочной станции 400 и их подключением к этому транспортному средству 100 для восстановления или восполнения запаса хода для обеспечения дальнейшего перемещения транспортного средства 100 в соответствии с его маршрутом следования.
К беспилотным летательным аппаратам 200, входящим в состав транспортной системы 500, следует относить как беспилотные летательные аппараты 200, которые могут быть размещены в модулях 104 стыковки транспортных средств 100, входящих в состав транспортной системы 500, так и беспилотные летательные аппараты 200, размещенные в парковочных станциях 400 или на них, и любые иные беспилотные летательные аппараты 200, которые могут быть направлены к любому из транспортных средств 100 для размещения в его модуле 104 хранения или взаимодействия с его модулем 106 стыковки, при этом специалисту в данной области техники должно быть очевидно, что по меньшей мере часть беспилотных летательных аппаратов 200 в указанном множестве беспилотных летательных аппаратов 200, входящих в состав транспортной системы 500, могут иметь разные типы, модификации, конструкции, габариты, массы, силовые установки и/или т.п.
Парковочные станции 400, входящие в состав транспортной системы 500, показанной на фиг. 5, предназначены для размещения, хранения или парковки в них беспилотных летательных аппаратов 200. Следует отметить, что для осуществления перемещения транспортное средство 100 может вообще не задействовать парковочные станции 400, может задействовать всего одну парковочную станцию 400 (как показано на фиг. 5) или может задействовать две и более парковочных станций 400, которые географически удалены друг от друга или расположены на расстоянии друг от друга и которые находятся в пределах области, соответствующей по меньшей мере одной из географических точек по маршруту следования транспортного средства 100. Например, парковочные станции 400 могут быть расположены на расстоянии несколько сотен метров друг от друга или несколько километров друг от друга. Географическое расположение парковочных станций 400 должно обеспечивать возможность своевременной замены одного или нескольких беспилотных летательных аппаратов 200 при перемещении транспортного средства 100 в различных направлениях и на различные расстояния. Например, парковочные станции 400 могут быть расположены через каждые 10 км или через каждый 1 км и т.п. Для специалиста в данной области техники должно быть очевидно, что количество парковочных станций 400 и их взаимное расположение могут отличаться в зависимости от конкретных географических локаций. В частности, в крупных городах может быть востребовано большее количество парковочных станций 400 на меньшем расстоянии друг от друга, чем в небольших городах или между городами, а также в иных возможных локациях. Как показано на фиг. 5, парковочная станция 400 представляет собой стационарную конструкцию, снабженную отсеками для размещения в них беспилотных летательных аппаратов 200. В одном из вариантов реализации настоящего изобретения парковочная станция 400 может быть реализована в виде отдельно стоящего строения или может быть выполнена в виде корпуса, установленного на здании, сооружении или ином стационарном объекте. В другом варианте реализации настоящего изобретения парковочная станция 400 может быть реализована в виде специального корпуса или конструкции, приспособленной для размещения, хранения или парковки в ней одного или более беспилотных летательных аппаратов 200 и установленной на подвижной платформе, например в кузове грузовика, на пароме, самолете, аэростате или ином транспортном средстве, которое обеспечивает возможность изменения географического местоположения парковочной станции 400. Еще в одном варианте реализации настоящего изобретения парковочная станция 400 может быть реализована в виде подвижной конструкции или специального транспортного средства, кузов которого может быть приспособлен для размещения, хранения или парковки в нем одного или более беспилотных летательных аппаратов 200. Подвижные парковочные станции 400 могут перемещаться между различными географическими локациями с учетом наиболее востребованных маршрутов перемещения транспортных средств 100 и оптимизации возможных географических локаций для замены беспилотных летательных аппаратов 200, подключенных к одному или более транспортных средств 100.
Следует отметить, что в качестве дополнения транспортная система 500 может содержать парковочные станции (например, наземные стационарные, водные стационарные, воздушные стационарные, наземные подвижные, водные подвижные, воздушные подвижные и/или т.п.) для размещения на них транспортных средств, обеспечивающие парковки или временного хранения по меньшей мере одного транспортного средства 100.
В некоторых вариантах реализации настоящего изобретения парковочная станция 400, показанная на фиг. 5, может быть снабжена источником питания (не показан), который может представлять собой одну или более аккумуляторных батарей, генератор на основе двигателя внутреннего сгорания, генератор на основе водородного двигателя, солнечную батарею и любой иной подходящий источник энергии, известный в уровне техники, и снабжена одним или более зарядными устройствами (не показаны), электрически соединенными каждый с указанным источником питания и обеспечивающими каждое возможность подключения к нему по меньшей мере одного из беспилотных летательных аппаратов 200, размещаемых, помещаемых на хранение или паркуемых в парковочной станции 400, с обеспечением возможности подзарядки или дозарядки указанного беспилотного летательного аппарата 200. Следует отметить, что каждое из зарядных устройств (не показаны) парковочной станции 400 может представлять собой беспроводное зарядное устройство, проводное зарядное устройство или зарядную док-станцию. В одном из вариантов реализации настоящего изобретения парковочной станции 400 по меньшей мере одно из зарядных устройств (не показаны), которыми может быть снабжена парковочная станция 400 в транспортном средстве 100, может быть гидравлически соединено с помощью насоса, соединенного гидравлической линией с резервуаром или емкостью с топливом с возможностью забора этого топлива из указанной емкости, с обеспечением возможности подачи указанного забранного объема топлива в топливный бак беспилотного летательного аппарата 200, гидравлически соединенный с работающим на топливе двигателем беспилотного летательного аппарата 200, для восполнения запаса его хода (в частности, благодаря по меньшей мере частичному восполнению объема топлива в топливном баке беспилотного летательного аппарата 200).
На фиг. 5 для наглядности также показаны три ключевых положения, которые принимает транспортное средство 100 в процессе его перемещения по воздуху от начального пункта следования до следующего пункта следования (промежуточная остановка или конечный пункт следования) в соответствии с его маршрутом следования: положение взлета (крайнее правое изображение транспортного средства 100 на фиг. 5), соответствующее нахождению транспортного средства 100 в начальном пункте следования, положение полета (центральное изображение транспортного средства 100 на фиг. 5), соответствующее нахождению транспортного средства 100 в полете между пунктами следования, и положение посадки или приземления (крайнее левое изображение транспортного средства 100 на фиг. 5), соответствующее нахождению транспортного средства 100 в следующем пункте следования, который может являться конечным пунктом следования или промежуточной остановкой транспортного средства 100. Несмотря на то, что на фиг. 5 проиллюстрированы положения транспортного средства 100 при его перемещении по воздуху (т.е. в случае его полета), специалисту в данной области техники должно быть очевидно, что транспортное средство 100 будет по сути принимать схожие положения и в случае его перемещения по воде или суше, при этом начало движения транспортного средства 100 по воде или суше будет по сути соответствовать положению взлета, показанному на фиг. 5 справа, а завершение движения транспортного средства 100 по воде или суше будет по сути соответствовать положению посадки, показанному на фиг. 5 слева.
Как показано на фиг. 5, начальный пункт следования транспортного средства 100 в соответствии с его маршрутом следования соответствует условной географической точке A (географическое место или географическая область), а следующий пункт следования (промежуточная остановка или конечный пункт следования) соответствует условной географической точке Б (географическое место или географическая область). Расстояние между условными географическими точками А и Б может составлять от нескольких десятков метров до нескольких километров, десятков километров, сотен километров или даже тысяч километров. Как будет понятно специалисту из дальнейшего описания способ перемещения и конструкция транспортного средства 100 может предполагать длительный беспосадочный перелет, что может обеспечиваться за счет однократной или многократной (два и более раз) замены беспилотных летательных аппаратов 200 в полете и восполнения запаса хода транспортного средства 100 без необходимости его посадки вплоть до достижения пункта назначения.
Ниже описаны особенности работы или функционирования транспортного средства 100 в каждом из вышеописанных трех положений, проиллюстрированных на фиг. 5.
В положении взлета из модуля 104 хранения извлекают или выпускают беспилотные летательные аппараты 200 в количестве, необходимом для обеспечения перемещения транспортного средства, в частности в соответствии с заданным маршрутом следования. Беспилотные летательные аппараты 200, выпущенные из модуля 104 хранения, в автоматическом режиме летят к модулю 106 стыковки и затем последовательно по одному или группами размещаются в стыковочном месте модуля 106 стыковки с последующим сцеплением с тяговым сцепным элементом 108, что обеспечивает соединение этих беспилотных летательных аппаратов 200 с фюзеляжем 102.
Беспилотные летательные аппараты 200, соединенные с фюзеляжем, осуществляют совместный взлет под управлением модуля управления транспортного средства 100 и поднимают транспортное средство 100 в воздух. В отдельных вариантах реализации настоящего изобретения после взлета транспортного средства 100 или перед ним может быть дополнительно осуществлена установка складного/выдвижного крыла или складных/выдвижных крыльев в рабочее положение. В других вариантах реализации настоящего изобретения после взлета транспортного средства 100 или перед ним может быть дополнительно осуществлен запуск одного или более авиационных двигателей на транспортном средстве 100. После завершения этапа взлета транспортное средство 100 переходит в режим полета.
В положении полета при достижении транспортным средством 100 парковочной станции 400 на маршруте следования или достижении порогового значения запаса хода из парковочной станции 400 направляют по меньшей мере один подменный беспилотный летательный аппарат 200 к транспортному средству 100.
Далее, от фюзеляжа 102 отсоединяют по меньшей мере один беспилотный летательный аппарат 200 из беспилотных летательных аппаратов 200, соединенных с фюзеляжем 102 посредством модуля 106 стыковки и используемых для перемещения транспортного средства 100. Замена одного или более беспилотных летательных аппаратов 200, соединенных с фюзеляжем 102, может быть осуществлена как в случае исчерпания запаса хода (разрядки аккумулятора или исчерпания топлива), так и в случае выхода из строя одного или нескольких из указанных беспилотных летательных аппаратов 200, либо планово с учетом проложенного маршрута следования.
По меньшей мере один подменный беспилотный летательных аппарат 200, направленный от парковочной станции 400 к транспортному средству 100, размещают в стыковочном месте модуля 106 стыковки и сцепляют с тяговым сцепным элементом 108 в транспортном средстве 100. Разряженный беспилотный летательный аппарат 202, отсоединенный от фюзеляжа 102, направляют в модуль 104 хранения того же транспортного средства 100, в одну из парковочных станций 400 или модуль 104 хранения другого транспортного средства 100 для его последующей подзарядки и повторного использования.
Таким образом, на протяжении полета возможна многократная замена отдельных беспилотных летательных аппаратов 200 в транспортном средстве 100, в том числе возможна последовательная замена всех беспилотных летательных аппаратов 200, подключенных к транспортному средству 100 на этапе взлета, без необходимости в осуществлении вынужденной или незапланированной посадки транспортного средства 100 до момента достижения им пункта назначения, в котором предусмотрена плановая посадка. С учетом географического распределения парковочных станций 400 возможные маршруты следования и расстояния перемещения транспортного средства 100 могут быть практически неограниченны.
В случае, когда транспортное средство 100 летит через океан, парковочные станции 400 могут быть размещены на морских судах, кораблях, буях или т.п. для осуществления своевременной замены беспилотных летательных аппаратов 200 в транспортном средстве 100. При достижении пункта назначения транспортное средство 100 переходит в режим посадки.
В положении посадки осуществляют отключение дополнительных авиационных двигателей транспортного средства 100 (при наличии), осуществляют складывание крыла/крыльев (при наличии), а затем переходят к осуществлению процесса посадки или приземления транспортного средства 100 посредством беспилотных летательных аппаратов 200, подключенных к фюзеляжу 102 транспортного средства. Затем отсоединяют эти беспилотные летательные аппараты 200 от фюзеляжа 102 путем их вывода из взаимодействия с модулем 106 стыковки и автоматически направляют по меньшей мере частично в модуль 104 хранения транспортного средства 100, и/или по меньшей мере частично на одну из парковочных станций 400 и/или по меньшей мере частично в модуль 104 хранения другого транспортного средства 100 для последующей подзарядки и повторного использования указанных беспилотных летательных аппаратов 200.
После посадки блок питания (при его наличии) транспортного средства 100 может быть подключен к внешнему источнику питания для подзарядки беспилотных летательных аппаратов 200, размещенных в модуле 104 хранения. Затем транспортное средство 100 может снова перейти в режим взлета для продолжения перемещения в рамках того же самого маршрута следования транспортного средства 100 или для перемещения в соответствии с новым маршрутом следований.
В одном из вариантов реализации настоящего изобретения транспортная система 500 может содержать транспортное средство 100 согласно любому из вышеописанных вариантов его реализации, дополнительно снабженное модулем определения местоположения (например, GPS-система или любая иная система определения местоположения, известная в уровне техники), выполненным с возможностью определения географических координат транспортного средства 100 в реальном времени, беспилотные летательные аппараты 200, используемые транспортным средством 100, парковочные станции 400 (например, наземные стационарные, водные стационарные, воздушные стационарные, наземные подвижные, водные подвижные, воздушные подвижные и/или т.п.), выполненные с возможностью хранения подменных или дополнительных беспилотных летательных аппаратов 200, и сервер 300, выполненный с возможностью управления работой указанных дополнительных беспилотных летательных аппаратов 200 на указанных наземных парковочных станциях 400 и соединенный с возможностью обмена данными с модулем управления транспортного средства 100 с обеспечением возможности приема от него данных о маршруте следования, указывающих на точный или приблизительный маршрут следования транспортного средства 100. В таком варианте реализации настоящего изобретения модуль управления транспортного средства 100 может быть дополнительно выполнен с возможностью направления запроса на сервер 300 для предоставления по меньшей мере одного подменного или дополнительного летательного аппарата 200 в заданной географической точке или области, соответствующей указанному маршруту следования транспортного средства 100. Кроме того, в таком варианте реализации настоящего изобретения сервер 300 может быть дополнительно выполнен с возможностью приема координат транспортного средства 100 от модуля управления транспортного средства 100 в реальном времени для выявления по меньшей мере одной из указанных парковочных станций, соответствующих указанному запросу, с обеспечением возможности направления по меньшей мере одного дополнительного летательного аппарата 200 из указанных выявленных парковочных станций 400 в момент времени, в который близость транспортного средства 100 к указанной географической области соответствует пороговому значению, для взаимодействия каждого из указанных дополнительных летательных аппаратов 200 с модулем 106 стыковки транспортного средства 100. В одной из разновидностей данного варианта реализации настоящего изобретения модуль 104 хранения в транспортном средстве 100 может быть снабжен зарядным устройством (например, устройством для подачи электрической энергии, устройством для подачи жидкого или газообразного топлива и/или т.п.), а беспилотные летательные аппараты 200 транспортного средства 100 могут быть выполнены с возможностью последовательного функционального соединения друг с другом (например, электрически и/или посредством линии для подачи топлива) при размещении в указанном модуле 104 хранения с обеспечением возможности их подключения к указанному зарядному устройству (не показано) для их по существу одновременной зарядки (например, зарядки или дозарядки аккумуляторных батарей в таких беспилотных летательных аппаратах 200) и/или по существу одновременного восполнения их запаса хода (например, зарядки аккумуляторных батарей и/или дозаправки топливом топливных баков в таких беспилотных летательных аппаратах 200). Еще в одной разновидности данного варианта реализации настоящего изобретения сервер 300, входящий в состав транспортной системы 500, может обеспечивать возможность резервирования по меньшей мере одного дополнительного летательного аппарата на каждой из парковочных станций 400, выявленных сервером 300 в ответ на соответствующий запрос от модуля управления транспортного средства 100 на предоставление по меньшей мере одного дополнительного летательного аппарата 200, на заданный период времени в соответствии с указанным запросом. В иной разновидности данного варианта реализации настоящего изобретения модуль управления транспортного средства 100 может обеспечивать возможность направления по меньшей мере части из соединенных с фюзеляжем 102 беспилотных летательных аппаратов 200, запас хода которых в заданной географической области, которая соответствует маршруту следования транспортного средства 100 и которая относится к запросу транспортного средства 100 на предоставление по меньшей мере одного дополнительного летательного аппарата 200, меньше порогового значения, по меньшей мере на одну из парковочных станций 400, соответствующих указанной географической области. В некоторой другой разновидности данного варианта реализации настоящего изобретения каждая из парковочных станций 400, выявленных сервером 300 в ответ на соответствующий запрос от модуля управления транспортного средства 100 на предоставление по меньшей мере одного дополнительного летательного аппарата 200, может быть снабжена зарядными устройствами (например, устройством для подачи электрической энергии, устройством для подачи жидкого или газообразного топлива и/или т.п.) для зарядки беспилотных летательных аппаратов 200 или восполнения их запаса хода, модуль управления транспортного средства 100 может быть выполнен с возможностью выдачи данных о направленных беспилотных летательных аппаратах на сервер 300, а сервер 300 в свою очередь в ответ на указанные данные модуля управления транспортного средства может быть дополнительно выполнен с возможностью перехвата управления указанными направленными беспилотными летательными аппаратами 200 с обеспечением возможности подключения каждого из них к одному из зарядных устройств (не показаны) на парковочной станции 400, соответствующей указанному направленному беспилотному летательному аппарату 200, для подзарядки указанного перехваченного беспилотного летательного аппарата 200 (например, зарядки или дозарядки аккумуляторных батарей такого беспилотного летательного аппарата 200) или восполнения его запаса хода (например, зарядки их аккумуляторных батарей и/или дозаправки топливом их топливного бака). В некоторой иной разновидности данного варианта реализации настоящего изобретения модуль управления транспортного средства 100 может быть выполнен с возможностью получения данных об изменении веса полезной нагрузки в фюзеляже 102 на каждой из остановок в соответствии с маршрутом следования транспортного средства 100 и может быть дополнительно выполнен с возможностью определения количества беспилотных летательных аппаратов 200 для обеспечения запаса хода транспортного средства 100, позволяющего продолжать перемещение транспортного средства 100 (в частности, по воздуху, воде и/или суше) от указанной остановки до следующей остановки в соответствии с указанным маршрутом следования, с учетом указанного измененного веса полезной нагрузки и заданного снаряженного веса транспортного средства 100. В других разновидностях данного варианта реализации настоящего изобретения фюзеляж 102 в транспортном средстве 100 может быть дополнительно снабжен устройством обнаружения (например, фотокамера, видеокамера, лидар, радар, ИК-сенсор, УЗ-датчик, RFID-метка и т.п.), соединенным с возможностью обмена данными с модулем управления транспортного средства 100 и выполненным с возможностью обнаружения дополнительных летательных аппаратов 200 в зоне действия устройства обнаружения (не показано), а модуль управления транспортного средства 100 в ответ на указанные показания устройства обнаружения может обеспечивать возможность выхода из взаимодействия с модулем 106 стыковки беспилотных летательных аппаратов 200, запас хода которых ниже порогового значения, в количестве, соответствующем количеству указанных обнаруженных дополнительных летательных аппаратов 200, с обеспечением возможности их размещения в модуле 104 хранения того же самого транспортного средства 100, возможности их размещения в модуле 104 хранения другого транспортного средства 100 и/или возможности их направления по меньшей мере на одну из парковочных станций 400, соответствующих указанной географической области. В иных разновидностях данного варианта реализации настоящего изобретения каждая из парковочных станций 400 может быть дополнительно выполнена с возможностью размещения с обеспечением возможности хранения и/или зарядки в ней по меньшей мере одного транспортного средства 100 и с возможностью выдачи данных о свободных местах для размещения транспортных средств 100 на сервер 300 в ответ на запрос сервера 300; модуль управления транспортного средства 100 может быть выполнен с возможностью выдачи запроса на сервер 300 на остановку транспортного средства 100 в парковочной станции 400; сервер 300 в свою очередь в ответ на указанный запрос об остановке может быть дополнительно выполнен с возможностью направления запроса в парковочные станции 400, соответствующие координатам транспортного средства 100, для выявления по меньшей мере одной парковочной станции 400 со свободным местом для размещения транспортного средства 100, и выдачи управляющих инструкций на модуль управления транспортного средства 100 с обеспечением (i) возможности направления указанного транспортного средства 100 под управлением модуля управления транспортного средства 100 к одной из выявленных свободных парковочных станций 400 или (ii) возможности перехвата управления указанным транспортным средством 100 с обеспечением возможности его направления к одной из выявленных свободных парковочных станций 400, при этом для зарядки транспортного средства 100, размещенного в парковочной станции 400, может быть использовано зарядное устройство для зарядки транспортных средств, выполненное с возможностью функционального соединения с источником питания транспортного средства 100 для восполнения запаса хода транспортного средства 100, например путем восполнения заряда аккумуляторной батареи транспортного средства 100, восполнения топлива в топливном баке транспортного средства 100, восполнения рабочей среды (жидкой, твердой или газообразной), используемой в генераторе транспортного средства 100, работающем с использованием указанной рабочей среды, и/или т.п. В некоторых других разновидностях данного варианта реализации настоящего изобретения каждая из парковочных станций 400 может быть снабжена зарядными устройствами (например, устройством для подачи электрической энергии, устройством для подачи жидкого или газообразного топлива и/или т.п.) для зарядки беспилотных летательных аппаратов 200 (например, зарядки их аккумуляторных батарей) или восполнения их запаса хода (например, зарядки их аккумуляторных батарей и/или дозаправки топливом их топливного бака) и может быть выполнена с возможностью выдачи данных о свободных зарядных устройствах (не показаны) на сервер 300 в ответ на запрос сервера 300; модуль управления транспортного средства 100 может быть дополнительно выполнен с возможностью выдачи запроса на сервер 300 на подзарядку беспилотных летательных аппаратов 200 или восполнение их запаса хода; сервер 300 в свою очередь в ответ на указанный запрос о подзарядке или восполнении запаса хода может быть дополнительно выполнен с возможностью (1) направления запроса в свободную парковочную станцию 400 для выявления количества свободных зарядных устройств (не показаны) для подзарядки или восполнения запаса хода беспилотных летательных аппаратов 200 транспортного средства 100, и (2) выдачи управляющих инструкций на модуль управления транспортного средства 100 с обеспечением (i) возможности направления по меньшей мере одного из требующих подзарядки или восполнения запаса хода беспилотных летательных аппаратов 200 транспортного средства 100 под управлением модуля управления транспортного средства 100 к одному из выявленных свободных зарядных устройств (не показаны) при размещении транспортного средства 100 в указанной свободной парковочной станции 400 или (ii) возможности перехвата управления указанным требующим подзарядки или восполнения запаса хода беспилотным летательным аппаратом 200 с обеспечением возможности его направления к одному из выявленных свободных зарядных устройств (не показаны) при размещении транспортного средства 100 в указанной свободной парковочной станции 400. В некоторых иных разновидностях данного варианта реализации настоящего изобретения каждый из беспилотных летательных аппаратов 200 транспортного средства 100 может быть дополнительно выполнен с возможностью выдачи данных о запасе хода (в качестве альтернативы данных об уровне заряда батареи или данных о запасе топлива) на модуль управления транспортного средства 100 в ответ на запрос о восполнении запаса хода, выданный модулем управления транспортного средства 100 на сервер 300; а модуль управления транспортного средства 100 может быть дополнительно выполнен с возможностью установления количества разряженных беспилотных летательных аппаратов 200 транспортного средства 100, запас хода (в качестве альтернативы уровень заряда аккумуляторной батареи или запас топлива) которых меньше порогового значения, на основании указанных данных об уровне запасе хода, при этом указанный запрос о восполнении запаса хода предусматривает восполнение запаса хода по меньшей мере одного из указанных разряженных беспилотных летательных аппаратов 200 при размещении транспортного средства 100 в свободной парковочной станции 400. В отдельных разновидностях данного варианта реализации настоящего изобретения каждый из беспилотных летательных аппаратов 200 транспортного средства 100 может быть дополнительно выполнен с возможностью выдачи данных о запасе хода на модуль управления транспортного средства 100 в ответ на запрос о восполнении запаса хода, выданный модулем управления транспортного средства 100 на сервер 300; а модуль управления транспортного средства 100 может быть дополнительно выполнен с возможностью установления количества разряженных беспилотных летательных аппаратов 200 транспортного средства 100, запас хода которых меньше порогового значения (т.е. тех беспилотных летательных аппаратов 200, у которых аккумуляторная батарея полностью разряжена или имеет недостаточный уровень заряда, меньший заданного порогового значения, и/или у которых в топливном баке нет топлива или имеется недостаточный уровень топлива, меньший заданного порогового значения), на основании указанных данных о запасе хода, при этом указанный запрос о восполнении запаса хода предусматривает восполнение запаса хода по меньшей мере одного из указанных разряженных беспилотных летательных аппаратов 200 при размещении транспортного средства 100 в свободной парковочной станции 400. В различных других разновидностях данного варианта реализации настоящего изобретения модуль управления транспортного средства 100 может быть выполнен с возможностью генерирования запроса на восполнение запаса хода по меньшей мере одного дополнительного летательного аппарата 200, который должен быть выдан на сервер 300, в случае, если зарядные устройства транспортного средства 100 не способны зарядить по меньшей мере часть из указанных разряженных беспилотных летательных аппаратов 200, необходимую для продолжения перемещения транспортного 100 средства (в частности, по воздуху, воде и/или суше), за период времени, соответствующий плановой продолжительности остановки транспортного средства 100 в свободной парковочной станции 400, при этом указанный запрос на восполнение запаса хода предусматривает восполнение запаса хода указанной необходимой части разряженных беспилотных летательных аппаратов 200. В различных иных разновидностях данного варианта реализации настоящего изобретения модуль управления транспортного средства 100 может быть дополнительно выполнен с возможностью (i) определения количества недостающих заряженных беспилотных летательных аппаратов 200 транспортного средства 400 путем сравнения предварительно определенного количества беспилотных летательных аппаратов 200 транспортного средства 100, требуемых для продолжения перемещения транспортного средства 100 (в частности, по воздуху, воде и/или суше) до следующей плановой остановки транспортного средства 100 в соответствии с маршрутом следования транспортного средства 100, и количества беспилотных летательных аппаратов 200, заряженных на момент завершения указанного периода остановки, и (ii) выдачи запроса на сервер 300 на предоставление дополнительных летательных аппаратов 200 в количестве, соответствующем указанному определенному количеству недостающих заряженных беспилотных летательных аппаратов 200, по меньшей мере на период времени, соответствующий перемещению транспортного средства 100 до указанной следующей остановки.
В другом варианте реализации настоящего изобретения транспортная система 500 может содержать транспортное средство 100 согласно любому из вышеописанных вариантов его реализации, дополнительно снабженное модулем определения местоположения (например, GPS-система или любая иная система определения местоположения, известная в уровне техники), выполненным с возможностью определения географических координат транспортного средства 100 в реальном времени, беспилотные летательные аппараты 200, используемые транспортным средством 100, и парковочные станции 400 (например, наземные стационарные, водные стационарные, воздушные стационарные, наземные подвижные, водные подвижные, воздушные подвижные и/или т.п.), каждая из которых выполнена с возможностью хранения и/или зарядки дополнительных беспилотных летательных аппаратов 200 и с возможностью управления работой указанных дополнительных беспилотных летательных аппаратов 200, причем указанные парковочные станции 400 могут быть дополнительно выполнены с возможностью обмена данными с модулем управления транспортного средства 100 с обеспечением возможности приема от него данных о маршруте следования транспортного средства, указывающих на точный или приблизительный маршрут следования транспортного средства 100. Кроме того, в данном варианте реализации настоящего изобретения модуль управления транспортного средства 100 может быть дополнительно выполнен с возможностью направления запроса по меньшей мере на одну из парковочных станций 400 для предоставления по меньшей мере одного дополнительного беспилотного летательного аппарата 200 в географической области, соответствующей маршруту следования транспортного средства 100, а по меньшей мере одна парковочная станция 400 в ответ на запрос на предоставление по меньшей мере одного дополнительного беспилотного летательного аппарата может обеспечивать возможность направления по меньшей мере одного дополнительного летательного аппарата 200 в момент времени, в который близость транспортного средства 100 к географической области, соответствующей указанному запросу, в соответствии с указанным маршрутом следования соответствует пороговому значению, для взаимодействия каждого из указанных дополнительных летательных аппаратов 200 с модулем 106 стыковки транспортного средства 100.
В ином варианте реализации настоящего изобретения транспортная система 500 может содержать транспортное средство 100 согласно любому из вышеописанных вариантов его реализации, беспилотные летательные аппараты 200, используемые транспортным средством 100, и парковочные станции 400 (например, наземные стационарные, водные стационарные, воздушные стационарные, наземные подвижные, водные подвижные, воздушные подвижные и/или т.п.), которые могут быть выполнены с возможностью хранения и/или зарядки дополнительных беспилотных летательных аппаратов 200, и сервер 300, выполненный с возможностью управления работой указанных дополнительных беспилотных летательных аппаратов 200 на указанных парковочных станциях 400 и соединенный с возможностью обмена данными с модулем управления транспортного средства 100. Кроме того, в данном варианте реализации настоящего изобретения модуль управления транспортного средства 100 может быть дополнительно выполнен с возможностью направления запроса на сервер 300 для предоставления по меньшей мере одного дополнительного летательного аппарата 200, а сервер 300 в свою очередь может быть дополнительно выполнен с возможностью выявления по меньшей мере одной из парковочных станций 400, соответствующей указанному запросу на предоставление по меньшей мере одного дополнительного летательного аппарата, с обеспечением возможности направления по меньшей мере одного дополнительного летательного аппарата 200 из указанных выявленных парковочных станций 400 в момент времени, в который близость транспортного средства 100 к указанным выявленным парковочным станциям 400 соответствует пороговому значению, для взаимодействия каждого из указанных дополнительных летательных аппаратов 200 с модулем 106 стыковки транспортного средства 100.
Еще в одном варианте реализации настоящего изобретения транспортная система 500 может содержать транспортное средство 100 согласно любому из вышеописанных вариантов его реализации, беспилотные летательные аппараты 200, используемые транспортным средством 100, и парковочные станции 400 (например, наземные стационарные, водные стационарные, воздушные стационарные, наземные подвижные, водные подвижные, воздушные подвижные и/или т.п.), каждая из которых может быть выполнена с возможностью хранения и/или зарядки дополнительных беспилотных летательных аппаратов 200 и с возможностью управления работой указанных дополнительных беспилотных летательных аппаратов 200, причем указанные парковочные станции 400 могут быть дополнительно выполнены с возможностью обмена данными с модулем управления транспортного средства 100. Кроме того, в данном варианте реализации настоящего изобретения модуль управления транспортного средства 100 может быть дополнительно выполнен с возможностью направления запроса по меньшей мере на одну из парковочных станций 400 для предоставления по меньшей мере одного дополнительного беспилотного летательного аппарата 200, а указанная по меньшей мере одна парковочная станция 400 в ответ на указанный запрос может дополнительно обеспечивать возможность направления указанного по меньшей мере одного дополнительного летательного аппарата 200 в момент времени, в который близость транспортного средства 100 к этой парковочной станции 400 соответствует пороговому значению, для взаимодействия каждого из указанных дополнительных летательных аппаратов 200 с модулем 106 стыковки транспортного средства 100.
Согласно одному из вариантов реализации настоящего изобретения, транспортная система 500 может содержать транспортные средства 100 согласно любому из вышеописанных вариантов его реализации, дополнительно снабженные каждое модулем определения местоположения (например, GPS-система или любая иная система определения местоположения, известная в уровне техники), выполненным с возможностью определения географических координат указанного транспортного средства 100 в реальном времени, а также группы беспилотных летательных аппаратов 200, используемые каждая одним из указанных транспортных средств 100, и сервер 300, соединенный с возможностью обмена данными с модулем управления транспортного средства 100 каждого из указанных транспортных средств 100 с обеспечением возможности приема от него данных о маршруте следования транспортного средства, указывающих на конкретный или приблизительный маршрут следования транспортного средства 100, и возможности приема от него координат транспортного средства 100 в реальном времени. Кроме того, в данном варианте реализации настоящего изобретения каждый из беспилотных летательных аппаратов 200 в каждом из транспортных средств 100 может быть дополнительно выполнен с возможностью выдачи данных о запасе хода (в качестве альтернативы данных об уровне заряда батареи или данных о запасе топлива) на модуль управления транспортного средства 100 в ответ на запрос модуля управления транспортного средства 100, соответствующий указанному беспилотному летательному аппарату 200, а модуль управления в каждом из указанных транспортных средств 100 может быть дополнительно выполнен с возможностью (1) определения количества свободных зарядных мест в модуле 104 хранения указанного транспортного средства 100, в которых обеспечена возможность восполнения запаса хода беспилотных летательных аппаратов 200, с обеспечением возможности выдачи данных о свободных зарядных местах модуля 104 хранения на сервер 300, (2) установления количества разряженных беспилотных летательных аппаратов 200 указанного транспортного средства 200, запас хода (в качестве альтернативы уровень заряда аккумуляторной батареи или запас топлива) которых меньше порогового значения, на основании указанных данных о запасе хода, и (3) выдачи запроса на сервер 300 на предоставление дополнительных летательных аппаратов 200 в количестве, соответствующем по меньшей мере части от указанного установленного количества разряженных беспилотных летательных аппаратов 200 транспортного средства 100. Кроме того, в данном варианте реализации настоящего изобретения сервер 300 в ответ на указанный запрос на предоставление дополнительных летательных аппаратов 200 может быть дополнительно выполнен с возможностью (1-1) установления другого транспортного средства 100 из указанных транспортных средств 100, положение которого соответствует координатам указанного транспортного средства 100 и в модуле 104 хранения которого количество свободных зарядных мест соответствует количеству разряженных беспилотных летательных аппаратов 200 указанного транспортного средства 100, или (1-2) установления по меньшей мере двух других транспортных средств 100 из указанных транспортных средств 100, положение каждого из которых соответствует координатам указанного транспортного средства 100 и в модулях 104 хранения которых суммарное количество свободных зарядных мест соответствует количеству разряженных беспилотных летательных аппаратов 200 указанного транспортного средства 100, и (2) дополнительно выполнен с возможностью выдачи управляющих инструкций на модуль управления указанного транспортного средства 100 с обеспечением возможности (i) направления указанных разряженных беспилотных летательных аппаратов 200 под управлением модуля управления указанного транспортного средства 100 к указанным свободным зарядным местам каждого установленного другого транспортного средства 100 или (ii) перехвата управления указанными разряженными беспилотными летательными аппаратами 200 с обеспечением возможности их направления к указанным свободным зарядным местам каждого установленного другого транспортного средства 100. В одной из разновидностей данного варианта реализации настоящего изобретения каждое из зарядных мест модуля 104 хранения в каждом из транспортных средств 100, входящих в состав транспортной системы 500, может быть снабжено зарядным устройством (например, устройством для подачи электрической энергии, устройством для подачи жидкого или газообразного топлива и/или т.п.) для подзарядки (например, зарядки аккумуляторной батареи) и/или по восполнения запаса хода (например, зарядки аккумуляторной батареи и/или дозаправки топливом топливного бака) беспилотного летательного аппарата 200, а каждый из разряженных беспилотных летательных аппаратов 200 может быть выполнен с возможностью подключения к зарядному устройству (не показано) при размещении на свободном зарядном месте с обеспечением возможности восполнения его запаса хода и возможности возврата к указанному транспортному средству 100 в заряженном состоянии под управлением модуля управления указанного транспортного средства 100 или под управлением сервера 200. В другой разновидности данного варианта реализации настоящего изобретения каждое другое транспортное средство 100, устанавливаемое сервером 300 в ответ на запрос на предоставление дополнительных летательных аппаратов 200, может дополнительно соответствовать условию, согласно которому в момент завершения зарядки соответствующих разряженных беспилотных летательных аппаратов 200, указанное другое транспортное средство 100 в соответствии с его маршрутом следования может находиться в области местоположения транспортного средства 100, на которое должны вернуться указанные заряженные беспилотные летательные аппараты 200, или может быть наименее удалено от этого беспилотного летательного аппарата 200 (т.е. может находиться на минимально допустимом расстоянии от него). Еще в одной разновидности данного варианта реализации настоящего изобретения модуль управления транспортного средства 100 может быть дополнительно выполнен с возможностью выдачи управляющих команд на вернувшиеся беспилотные летательные аппараты 200 с обеспечением возможности взаимодействия по меньшей мере части из них с модулем 106 стыковки транспортного средства 100, возможности размещения по меньшей мере части из них в модуле 104 хранения транспортного средства 100 и/или возможности замены по меньшей мере части из беспилотных летательных аппаратов 200, соединенных с фюзеляжем 102 транспортного средства 100. В иной разновидности данного варианта реализации настоящего изобретения модуль управления транспортного средства 100 может быть дополнительно выполнен с возможностью выдачи управляющих команд на вернувшиеся беспилотные летательные аппараты 200 с обеспечением возможности взаимодействия по меньшей мере части из них с модулем 106 стыковки транспортного средства 100, возможности размещения по меньшей мере части из них в модуле 104 хранения транспортного средства 100 и/или возможности замены по меньшей мере части из беспилотных летательных аппаратов 200, соединенных с фюзеляжем 102 транспортного средства 100.
Согласно другому варианту реализации настоящего изобретения, транспортная система 500 может содержать транспортные средства 100 согласно любому из вышеописанных вариантов его реализации, дополнительно снабженные каждое модулем определения местоположения (например, GPS-система или любая иная система определения местоположения, известная в уровне техники), выполненным с возможностью определения географических координат указанного транспортного средства 100 в реальном времени, а также группы беспилотных летательных аппаратов 200, используемые каждая одним из указанных транспортных средств 100, и сервер 300, соединенный с возможностью обмена данными с модулем управления каждого из указанных транспортных средств 100 с обеспечением возможности приема от него данных о маршруте следования транспортного средства, указывающих на конкретный или приблизительный маршрут следования транспортного средства 100, координат транспортного средства 100 в реальном времени и данных о количестве незадействованных беспилотных летательных аппаратов 200 транспортного средства 100 в модуле 104 хранения, которые не потребуются указанному транспортному средству 100 при перемещении в соответствии со своим маршрутом следования. Кроме того, в данном варианте реализации настоящего изобретения каждый из беспилотных летательных аппаратов 200 в каждом из транспортных средств 100, входящих в состав транспортной системы 500, может быть дополнительно выполнен с возможностью выдачи данных о запасе хода на модуль управления транспортного средства 100 в ответ на запрос модуля управления транспортного средства 100, соответствующий указанному беспилотному летательному аппарату 200. Кроме того, в данном варианте реализации настоящего изобретения модуль управления в каждом из транспортных средств 100, входящих в состав транспортной системы 500, может быть дополнительно выполнен с возможностью (1) установления количества недостающих заряженных беспилотных летательных аппаратов 200 из группы беспилотных летательных аппаратов транспортного средства 100, соответствующей указанному транспортному средству 100, для обеспечения запаса хода для указанного транспортного средства 100, позволяющего продолжить перемещение указанного транспортного средства 100 (в частности, по воздуху, воде и/или суше) до следующей остановки в соответствии с маршрутом следования транспортного средства 100, на основании данных о запасе хода, соответствующих указанному транспортному средству 100, и данных о целевом количестве заряженных беспилотных летательных аппаратов 200, позволяющем перемещать указанное транспортное средство 100 между остановками в соответствии с его маршрутом следования, (2) установления наличия свободных стыковочных мест в модуле 106 стыковки указанного транспортного средства 100, в которых обеспечена возможность соединения беспилотных летательных аппаратов 200 с фюзеляжем 102, в количестве, соответствующем указанному установленному количеству недостающих заряженных беспилотных летательных аппаратов 200, с обеспечением возможности выдачи данных о свободных стыковочных местах модуля 106 стыковки на сервер 300, и (3) выдачи на сервер 300 запроса на предоставление дополнительных летательных аппаратов 200 в количестве, соответствующем по меньшей мере части от указанного установленного количества недостающих заряженных беспилотных летательных аппаратов 200. Кроме того, в данном варианте реализации настоящего изобретения сервер 300 в ответ на запрос на предоставление дополнительных летательных аппаратов 300, выдаваемый на сервер 300 посредством модуля управления транспортного средства 100, может быть дополнительно выполнен с возможностью (1-1) установления другого транспортного средства 100 из транспортных средств 100 в составе транспортной системы 500, положение которого соответствует координатам указанного транспортного средства 100 и количество незадействованных беспилотных летательных аппаратов 200 которого соответствует указанному количеству недостающих заряженных беспилотных летательных аппаратов 200, или (1-2) установления по меньшей мере двух других транспортных средств 100 из транспортных средств в составе транспортной системы 500, положение каждого из которых соответствует координатам транспортного средства 100 и суммарное количество незадействованных беспилотных летательных аппаратов 200 которых соответствует количеству недостающих заряженных беспилотных летательных аппаратов 200, а также может быть дополнительно выполнен с возможностью (2) выдачи управляющих инструкций на модуль управления каждого установленного другого транспортного средства 200 с обеспечением возможности (i) направления каждого из незадействованных беспилотных летательных аппаратов 200 под управлением модуля управления указанного другого транспортного средства 100 к одному из указанных свободных стыковочных мест в модуле 106 стыковки или (ii) перехвата управления незадействованными беспилотными летательными аппаратами 200 с обеспечением возможности направления каждого из них к одному из указанных свободных стыковочных мест в модуле 106 стыковки. В одной из разновидностей данного варианта реализации настоящего изобретения в случае, если количество свободных стыковочных мест в модуле 106 стыковки транспортного средства 100, не соответствует количеству недостающих заряженных беспилотных летательных аппаратов 200, то модуль управления указанного транспортного средства 100 может быть дополнительно выполнен с возможностью направления управляющих инструкций на соединенные с фюзеляжем беспилотные летательные аппараты 200, соответствующие по количеству недостающему количеству свободных стыковочных мест и имеющие наименьший запас хода (в качестве альтернативы уровень заряда батареи или запас топлива), с обеспечением возможности их размещения в модуле 104 хранения указанного транспортного средства 100.
Способ перемещения транспортного средства
На фиг. 6 показана блок-схема, иллюстрирующая основные операции способа 700 перемещения транспортного средства 100, при этом способ 700 перемещения транспортного средства, показанный на фиг. 6, может быть выполнен с использованием транспортного средства 100, выполненного в соответствии с любым вариантов реализации настоящего изобретения, описанных в данном документе, или транспортной системы 500, выполненной в соответствии с любым вариантов реализации настоящего изобретения, описанных в данном документе, в зависимости от конкретного варианта исполнения данного способа 700. В частности, способ 700 перемещения транспортного средства 100, показанный на фиг. 6, включает три основные операции или следующих три основных этапа 710, 720 и 730, при этом на этапе 710 выдают управляющие команды на беспилотные летательные аппараты 200; на этапе 720 в ответ на указанные управляющие команды направляют указанные беспилотные летательные аппараты 200 к модулю 106 стыковки транспортного средства 100 с обеспечением взаимодействия с ним для соединения указанных направленных беспилотных летательных аппаратов 200 с фюзеляжем 102 транспортного средства 100; и на этапе 730 приводят в действие, посредством модуля управления транспортного средства 100, указанные присоединенные беспилотные летательные аппараты 200 с обеспечением перемещения транспортного средства 100 (в частности, по воздуху, воде и/или суше). Следует отметить, что вышеописанные операции 710, 720 и 730 способа 700 могут быть осуществлены для старта или начала перемещения транспортного средства 100 (в частности, по воздуху, воде и/или суше), в том числе для начала перемещения транспортного средства 100 (например, для его взлета) после его остановки (например, после посадки или приземления) и/или могут быть осуществлены один или более раз (то есть весь способ 700 может быть последовательно осуществлен один и более раз) в процессе перемещения транспортного средства 100 (в частности, по воздуху, воде и/или суше).
В одном из вариантов реализации способа 700 перемещения транспортного средства 100, показанного на фиг. 6, он может включать еще один этап, согласно которому предварительно, т.е. перед до осуществления вышеописанного этапа 710, перемещают это транспортное средство 100 к парковочной станции 400 или другому транспортному средству 100, при этом управляющие команды выдают на беспилотные летательные аппараты 200, размещенные соответственно в указанной парковочной станции 400 или модуле 104 хранения указанного другого транспортного средства 100.
В другом варианте реализации в способе 700 перемещения транспортного средства 100, показанном на фиг. 6, при осуществлении вышеописанного этапа 710 управляющие команды выдают на беспилотные летательные аппараты 200, размещенные в модуле 104 хранения того же самого транспортного средства 100, и/или беспилотные летательные аппараты 200, размещенные по меньшей мере на одной парковочной станции 400, и/или беспилотные летательные аппараты 200, размещенные в модуле 104 хранения по меньшей мере одного другого транспортного средства 100.
Кроме того, способ 700 перемещения транспортного средства 100, показанный на фиг. 6, может включать следующие дополнительные операции или этапы, согласно которым: (i) дополнительно принимают, посредством модуля управления транспортного средства 100, данные о запасе хода (в качестве альтернативы данных об уровне заряда батареи или данных о запасе топлива) от каждого из беспилотных летательных аппаратов 200, перемещающих транспортное средство 100 (в частности, по воздуху, воде и/или суше), в реальном времени; (ii) выявляют, посредством модуля управления транспортного средства 100, разряженный беспилотный летательный аппарат 200, запас хода которого меньше порогового значения, в указанных беспилотных летательных аппаратах 200 на основании указанных данных о запасе хода при перемещении транспортного средства 100 (в том числе при перемещении транспортного средства 100 соответствии с маршрутом следования транспортного средства 100); (iii) направляют заряженный беспилотный летательный аппарат 200 к модулю 106 стыковки транспортного средства 100 для замены указанного разряженного беспилотного летательного аппарата 200; (iv) выдают, посредством модуля управления транспортного средства 100, управляющие команды на указанный разряженный беспилотный летательный аппарат 200 с обеспечением его вывода из взаимодействия с модулем 106 стыковки транспортного средства 100 для отстыковки от фюзеляжа 102 транспортного средства 100 и (v) выдают, посредством модуля управления транспортного средства 100, управляющие команды на указанный заряженный беспилотный летательный аппарат 200 с обеспечением взаимодействия с указанным модулем 106 стыковки транспортного средства 100 для соединения указанного заряженного беспилотного летательного аппарата 200 с фюзеляжем 102 транспортного средства 100.
Способ 700 перемещения транспортного средства 100, показанный на фиг. 6, может включать еще одну дополнительную операцию или еще один дополнительный этап, согласно которому направляют отстыкованный беспилотный летательный аппарат 200 в модуль 104 хранения данного транспортного средства 100, парковочную станцию 400 для хранения беспилотных летательных аппаратов 200 или модуль 104 хранения другого транспортного средства 100 с обеспечением восполнения запаса хода указанного беспилотного транспортного средства 200.
В одном из вариантов реализации в способе 700 перемещения транспортного средства 100, показанном на фиг. 6, заряженный беспилотный летательный аппарат 200, направляемый к модулю 106 стыковки данного транспортного средства 100, выпускают из модуля 104 хранения транспортного средства 100, или парковочной станции 400 для хранения беспилотных летательных аппаратов 200 или модуля 104 хранения другого транспортного средства 100.
В другом варианте реализации в способе 700 перемещения транспортного средства 100, показанном на фиг. 6, для остановки (в качестве альтернативы для приземления) транспортного средства 100 изменяют, посредством модуля управления транспортного средства 100, режим работы беспилотных летательных аппаратов 200, перемещающих указанное транспортное средство 100 (в частности, по воздуху, воде и/или суше), с обеспечением отключения, посредством модуля управления транспортного средства 100, указанных беспилотных летательных аппаратов 200 после остановки (в качестве альтернативы после приземления) транспортного средства 100.
Еще в одном варианте в способе 700 перемещения транспортного средства 100, показанном на фиг. 6, при остановке (в качестве альтернативы при приземлении) транспортного средства 100 беспилотные летательные аппараты 200, перемещающие указанное транспортное средство 100 (в частности, по воздуху, воде и/или суше), направляют, посредством модуля управления транспортного средства 100, по меньшей мере частично в модуль 104 хранения указанного транспортного средства 100, и/или по меньшей мере частично в одну или более парковочных станций 400 для хранения беспилотных летательных аппаратов 200, соответствующих месту или области остановки (в качестве альтернативы области или месту приземления) транспортного средства 100, и/или по меньшей мере частично в модули 104 хранения одного или более других транспортных средств 100, соответствующих области остановки (в качестве альтернативы области или месту приземления) транспортного средства 100, с обеспечением восполнения запаса хода соответствующих беспилотных летательных аппаратов 200 с последующим образованием соответствующего множества подзаряженных беспилотных летательных аппаратов 200.
В ином варианте в способе 700 перемещения транспортного средства 100, показанном на фиг. 6, (i) сообщают модулю управления транспортного средства 100 маршрут следования транспортного средства 100, снаряженный вес транспортного средства 100 и вес полезной нагрузки транспортного средства 100; (ii) определяют, посредством модуля управления транспортного средства 100, географическую область в соответствии с маршрутом следования транспортного средства 100, в которой запас хода транспортного средства 100, обеспечиваемый беспилотными летательными аппаратами 200 транспортного средства 100, соответствует предельному уровню, на основании указанных сообщенных модулю управления данных; и (iii) выдают, посредством модуля управления транспортного средства 100, запрос на сервер 300 для резервирования дополнительных или заменяющих беспилотных летательных аппаратов 200 для указанного транспортного средства 100 в одной или более парковочных станций 400 для хранения беспилотных летательных аппаратов 200, соответствующих указанной географической области, и/или модулях 104 хранения одного или более других транспортных средств 100, соответствующих указанной географической области, в количестве, обеспечивающем запас хода транспортного средства 100, позволяющий транспортному средству 100 по меньшей мере частично завершить или продлить свой маршрут следования.
В некотором ином варианте в способе 700 перемещения транспортного средства 100, показанном на фиг. 6, (i) сообщают модулю управления транспортного средства 100 маршрут следования транспортного средства 100 с координатами остановок, снаряженный вес транспортного средства 100 и вес полезной нагрузки транспортного средства 100 на каждом участке маршрута следования между двумя последовательными остановками; (ii) определяют, посредством модуля управления транспортного средства 100, географическую область по меньшей мере на одном из участков маршрута следования, в которой запас хода транспортного средства 100, обеспечиваемый беспилотными летательными аппаратами 200 транспортного средства 100, соответствует предельному уровню, на основании указанных сообщенных модулю управления данных; и (iii) выдают, посредством модуля управления транспортного средства 100, запрос на сервер 300 для резервирования дополнительных или заменяющих беспилотных летательных аппаратов 200 для указанного транспортного средства 100 в одной или более парковочных станций 400 для хранения беспилотных летательных аппаратов 200, соответствующих указанной географической области, и/или модулях 104 хранения одного или более других транспортных средств 100, соответствующих указанной географической области, в количестве, обеспечивающем запас хода транспортного средства 100, позволяющий транспортному средству 100 по меньшей мере частично завершить указанный участок своего маршрута следования.
В некотором другом варианте в способе 700 перемещения транспортного средства 100, показанном на фиг. 6, (i) сообщают модулю управления транспортного средства 100 маршрут следования транспортного средства 100 с координатами остановок, снаряженный вес транспортного средства 100 и вес полезной нагрузки транспортного средства 100 на каждом участке маршрута следования между двумя последовательными остановками; (ii) выявляют, посредством модуля управления транспортного средства 100, по меньшей мере один из участков маршрута следования транспортного средства 100, на котором количество беспилотных летательных аппаратов 200 транспортного средства 100 превышает расчетное количество, необходимое для завершения транспортным средством 100 указанного участка маршрута следования, с обеспечением выдачи на сервер 300 данных о количестве незадействованных беспилотных летательных аппаратов 200 на указанном участке маршрута следования транспортного средства 100; и (iii) в ответ на управляющие инструкции сервера 300 направляют по меньшей мере часть из указанных незадействованных беспилотных летательных аппаратов 200 в одну или более парковочных станций 400 для хранения беспилотных летательных аппаратов 200, соответствующих указанному участку маршрута следования, и/или в модули 106 стыковки одного или более других транспортных средств 100, соответствующих указанному участку маршрута следования транспортного средства 100.
Представленные иллюстративные варианты осуществления настоящего изобретения, примеры и описание служат лишь для обеспечения понимания сущности заявляемого изобретения и не являются ограничивающими. Иные возможные варианты осуществления настоящего изобретения, либо модификации или улучшения вышеописанных вариантов реализации настоящего изобретения будут ясны специалисту в данной области техники из представленного выше описания. Объем настоящего изобретения ограничен лишь прилагаемой формулой изобретения.
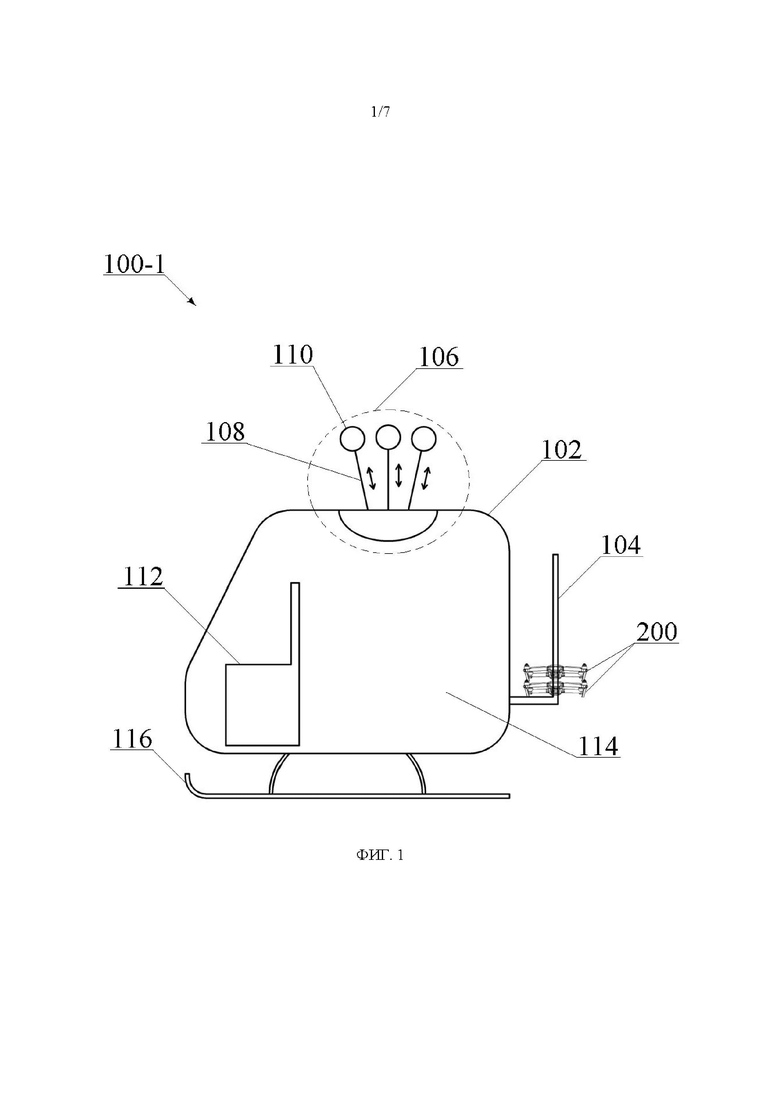
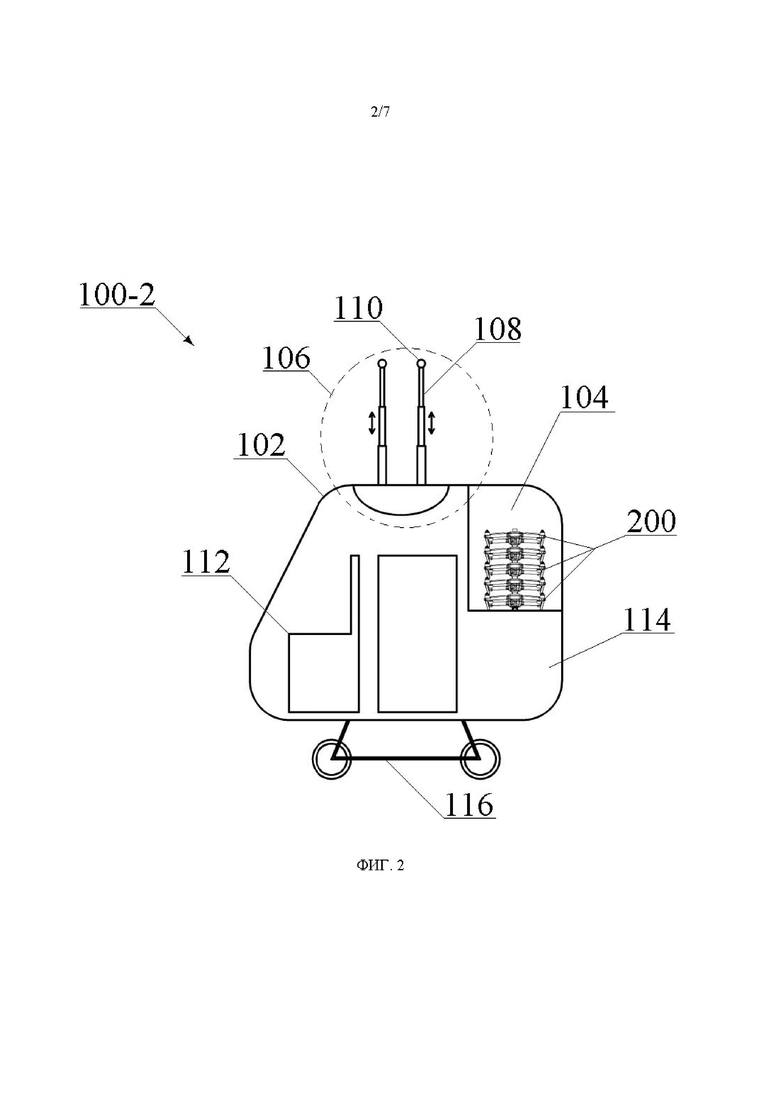
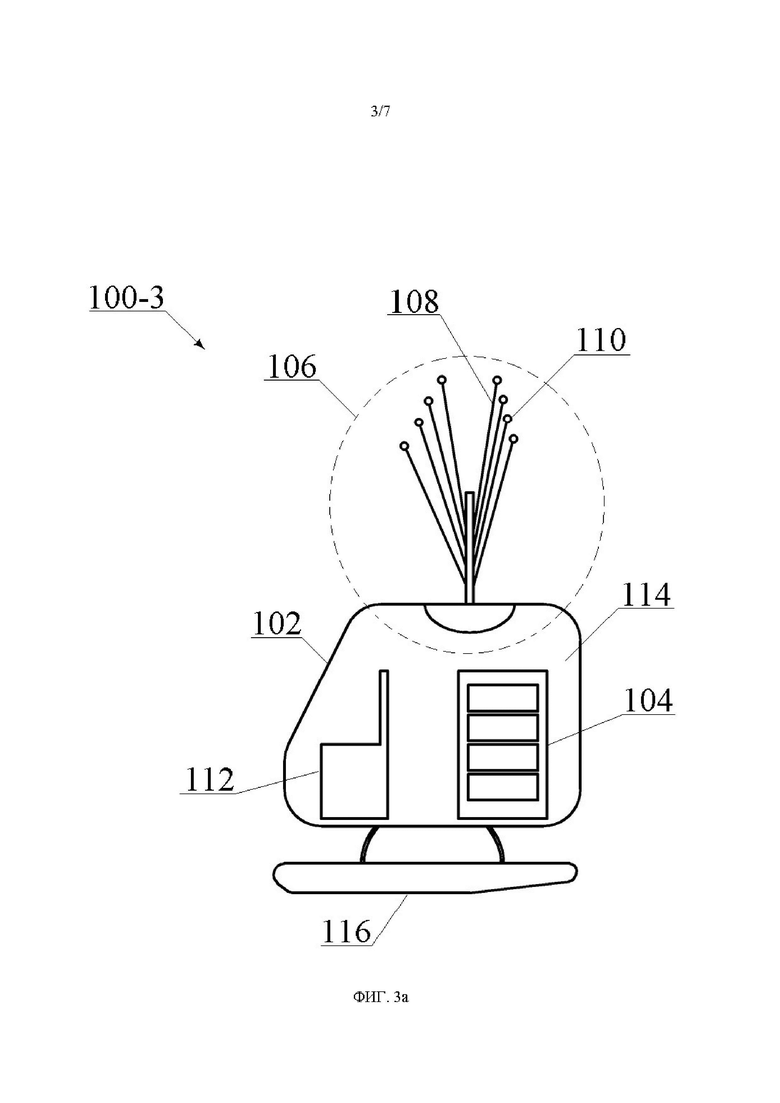
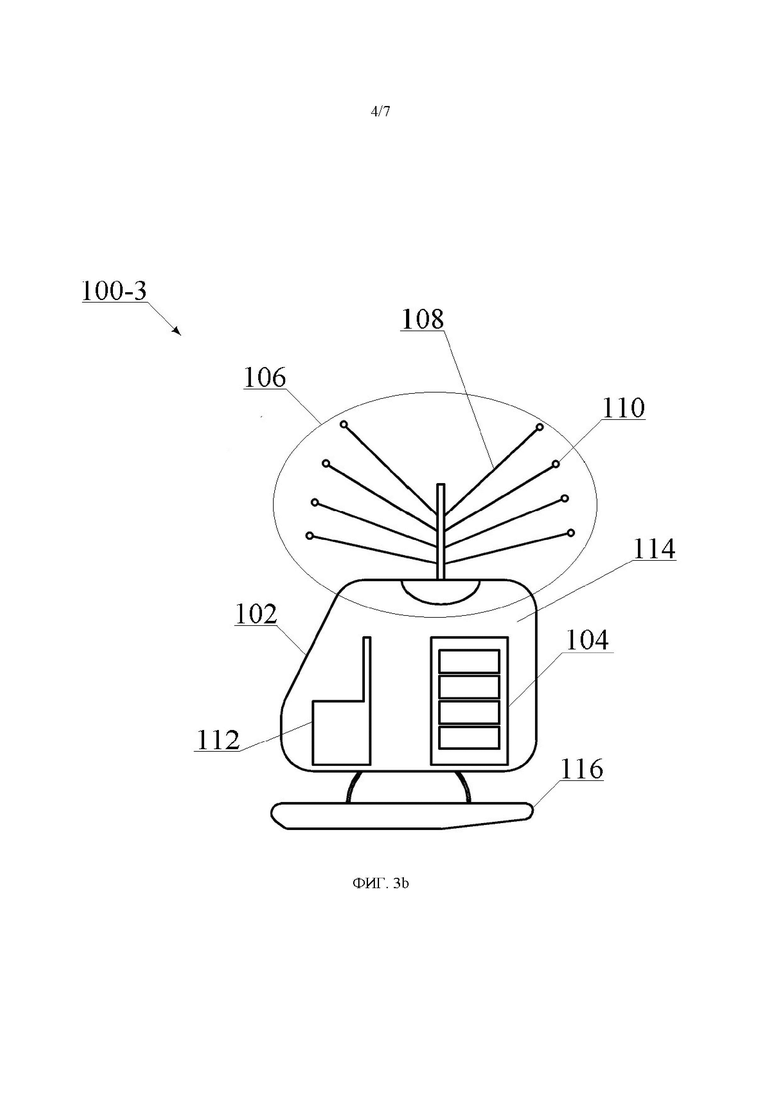
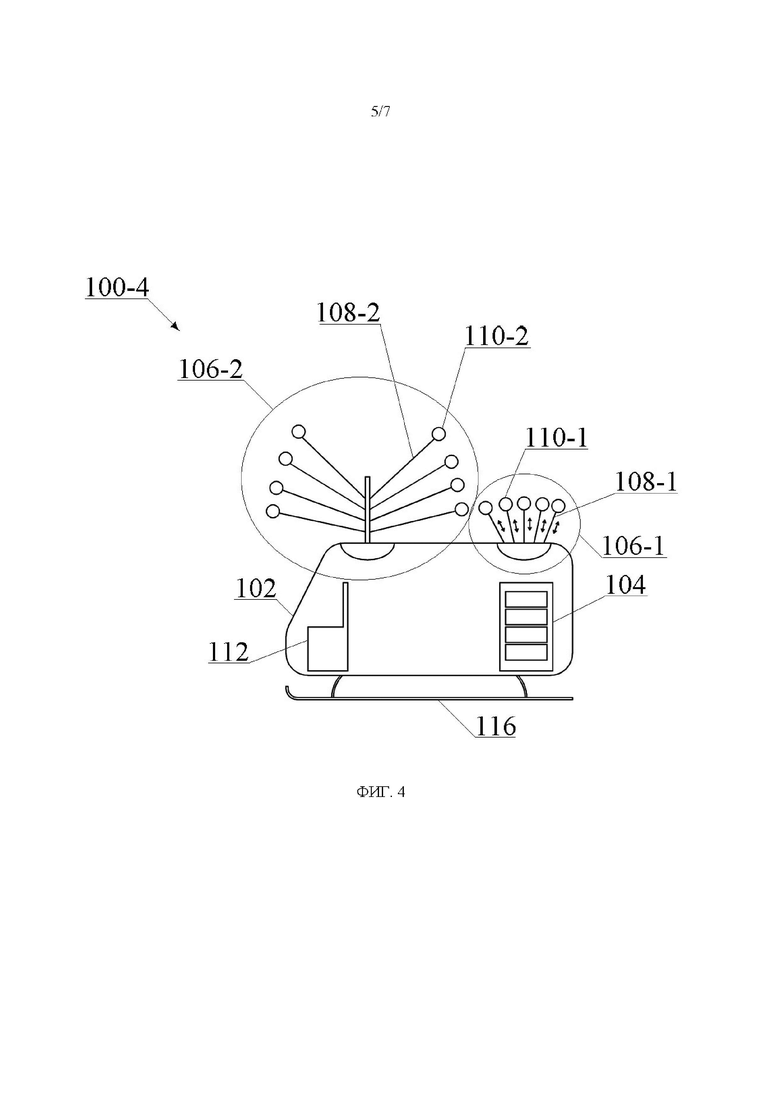
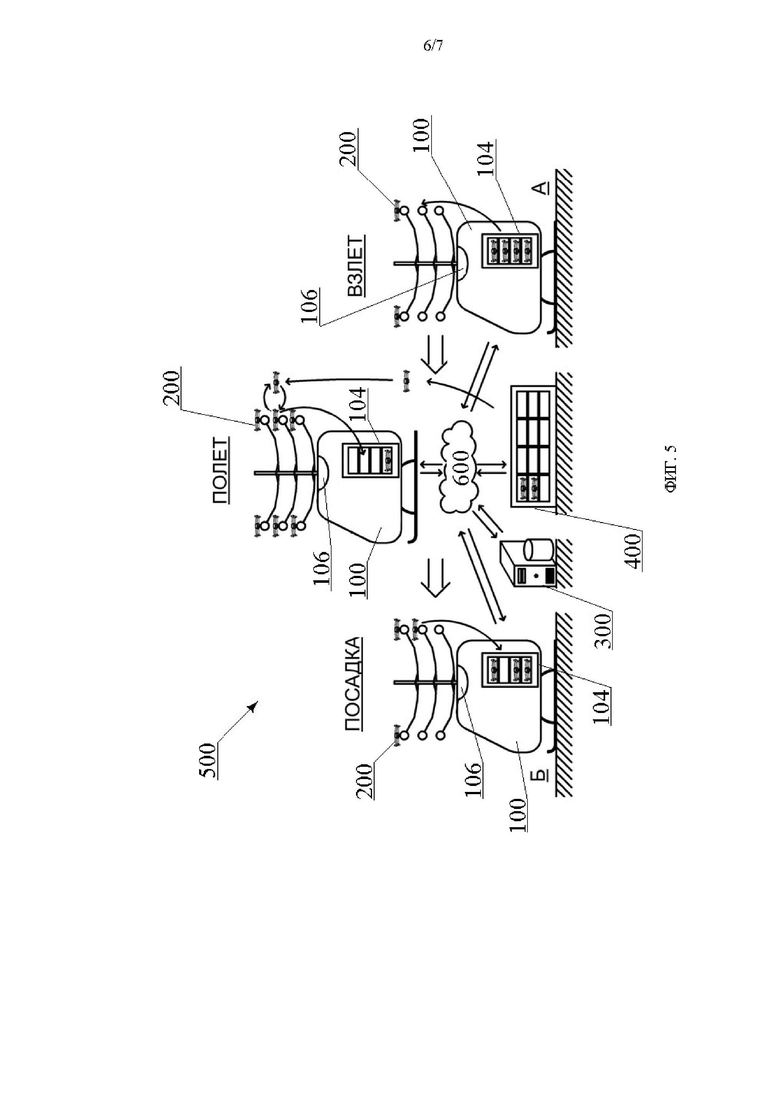
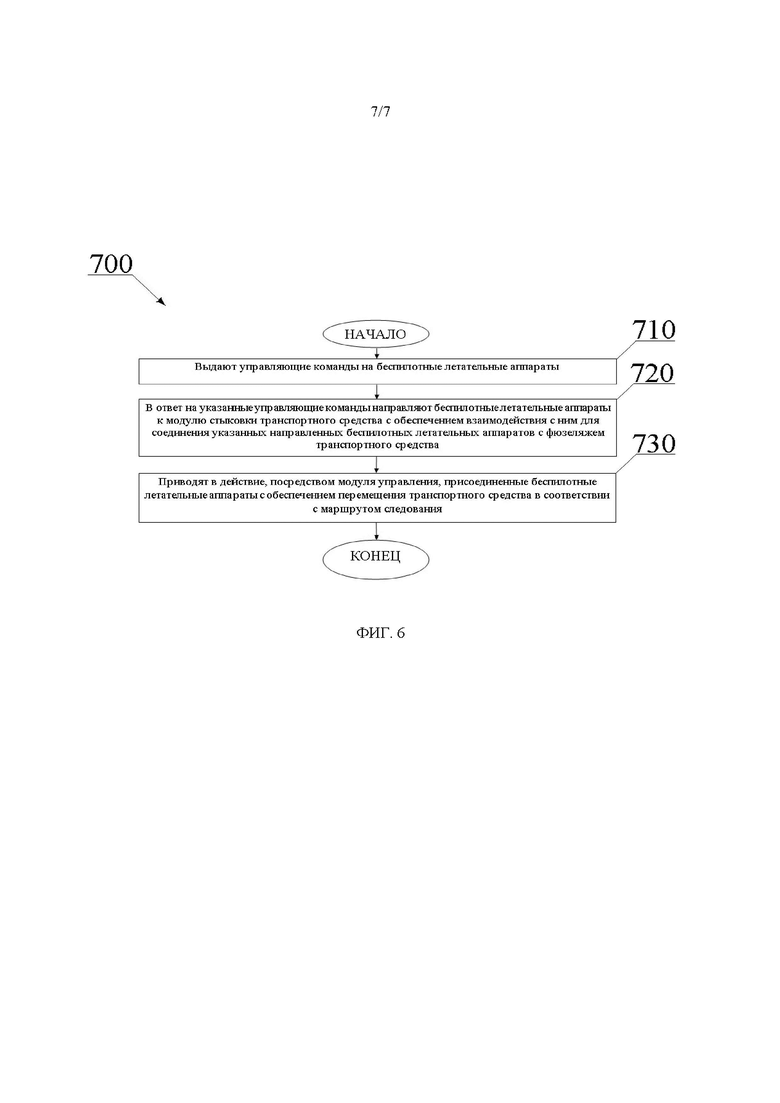
Настоящее изобретение относится к авиационной технике, а именно к транспортному средству, транспортной системе с таким транспортным средством и способу перемещения такого транспортного средства. Транспортное средство содержит фюзеляж, снабженный по меньшей мере одним модулем хранения, выполненным каждый с возможностью размещения в нем беспилотных летательных аппаратов, и по меньшей мере одним модулем стыковки, выполненным каждый с возможностью разъемного взаимодействия по меньшей мере с одним из указанных беспилотных летательных аппаратов с обеспечением возможности его соединения с фюзеляжем для перемещения указанного транспортного средства, и модуль управления, выполненный с возможностью выдачи управляющих команд по меньшей мере на один из указанных беспилотных летательных аппаратов с обеспечением возможности его выпуска из модуля хранения для взаимодействия с одним из указанных модулей стыковки. При этом фюзеляж выполнен с возможностью единовременного соединения с двумя и более беспилотными летательными аппаратами, а модуль управления дополнительно выполнен с возможностью приема в реальном времени данных о запасе хода от каждого из соединенных с фюзеляжем беспилотных летательных аппаратов с обеспечением возможности замены при перемещении транспортного средства по меньшей мере одного из указанных беспилотных летательных аппаратов по меньшей мере на один другой беспилотный летательный аппарат в случае, если запас хода указанного заменяемого беспилотного летательного аппарата ниже заданного порогового значения. Представлены также варианты транспортной системы, в состав каждой из которых входит упомянутое транспортное средство, и способ перемещения упомянутого транспортного средства. В результате повышается безопасность эксплуатации транспортного средства и снижается аварийность, достигается ускоренное прибытие транспортного средства в пункт назначения за счет обеспечения беспосадочного перелета, расширяется арсенал средств для транспортировки пассажиров и грузов. 8 н. и 61 з.п. ф-лы, 7 ил.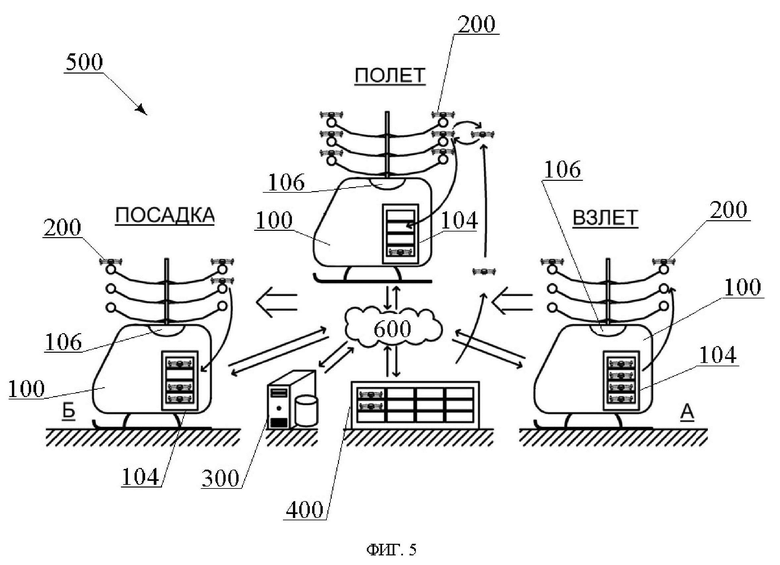
1. Транспортное средство, содержащее:
фюзеляж, снабженный одним или более модулями хранения, по меньшей мере в одном из которых размещены беспилотные летательные аппараты, и по меньшей мере одним модулем стыковки, выполненным каждый с возможностью разъемного взаимодействия по меньшей мере с одним из указанных беспилотных летательных аппаратов с обеспечением возможности его соединения с фюзеляжем для перемещения указанного транспортного средства, и
модуль управления, выполненный с возможностью выдачи управляющих команд по меньшей мере на один из указанных беспилотных летательных аппаратов с обеспечением возможности его выпуска из модуля хранения для взаимодействия с одним из указанных модулей стыковки;
фюзеляж выполнен с возможностью единовременного соединения с двумя и более беспилотными летательными аппаратами, а модуль управления дополнительно выполнен с возможностью приема в реальном времени данных о запасе хода от каждого из соединенных с фюзеляжем беспилотных летательных аппаратов с обеспечением возможности замены при перемещении транспортного средства по меньшей мере одного из указанных беспилотных летательных аппаратов по меньшей мере на один другой беспилотный летательный аппарат в случае, если запас хода указанного заменяемого беспилотного летательного аппарата ниже заданного порогового значения.
2. Транспортное средство по п. 1, в котором модуль управления дополнительно выполнен с возможностью выдачи управляющих команд по меньшей мере на один из беспилотных летательных аппаратов, соединенных с фюзеляжем, с обеспечением возможности его размещения в модуле хранения.
3. Транспортное средство по п. 1, в котором модуль управления дополнительно выполнен с возможностью выдачи управляющих команд по меньшей мере на один из беспилотных летательных аппаратов в модуле хранения с обеспечением возможности его выпуска из модуля хранения для взаимодействия с модулем стыковки при перемещении указанного транспортного средства по воздуху.
4. Транспортное средство по п. 2, в котором модуль управления соединен с возможностью обмена данными с внешним источником управления и дополнительно выполнен с возможностью приема от внешнего источника управления управляющих инструкций для выдачи указанных управляющих команд для беспилотных летательных аппаратов.
5. Транспортное средство по п. 2, в котором фюзеляж дополнительно снабжен измерительными датчиками для измерения параметров полета транспортного средства, а модуль управления соединен с возможностью обмена данными с указанными измерительными датчиками и внешним источником управления с обеспечением возможности выдачи указанных измеренных параметров полета транспортного средства на внешний источник управления и дополнительно выполнен с возможностью приема от внешнего источника управления управляющих инструкций в ответ на указанные параметры полета транспортного средства с обеспечением возможности выдачи указанных управляющих команд для беспилотных летательных аппаратов.
6. Транспортное средство по п. 2, в котором фюзеляж дополнительно снабжен датчиками для измерения параметров состояния фюзеляжа транспортного средства, а модуль управления соединен с возможностью обмена данными с указанными измерительными датчиками и внешним источником управления с обеспечением возможности выдачи указанных измеренных параметров состояния фюзеляжа транспортного средства на внешний источник управления и дополнительно выполнен с возможностью приема от внешнего источника управления управляющих инструкций в ответ на указанные параметры состояния фюзеляжа транспортного средства с обеспечением возможности выдачи указанных управляющих команд.
7. Транспортное средство по п. 3, в котором фюзеляж выполнен с возможностью размещения в нем полезной нагрузки и снабжен по меньшей мере одним датчиком веса, выполненным с возможностью измерения веса полезной нагрузки, а модуль управления соединен с указанным датчиком веса с возможностью приема от него результата измерения веса полезной нагрузки и обеспечивает возможность выпуска беспилотных летательных аппаратов из модуля хранения в количестве, зависящем от указанного измеренного веса полезной нагрузки и снаряженного веса транспортного средства.
8. Транспортное средство по п. 7, в котором фюзеляж снабжен двумя и более модулями стыковки, размещенными на расстоянии друг от друга, и снабжен двумя и более датчиками веса, а модуль управления выполнен с возможностью установления распределения полезной нагрузки в фюзеляже на основании показаний указанных датчиков веса и дополнительно выполнен с возможностью выдачи управляющих инструкций на указанные выпущенные беспилотные летательные аппараты для взаимодействия с указанными модулями стыковки в зависимости от установленного распределения полезной нагрузки в фюзеляже.
9. Транспортное средство по любому из пп. 1-8, в котором фюзеляж выполнен с возможностью размещения в нем пилота и содержит органы управления транспортным средством, обеспечивающие возможность ввода пилотом по меньшей мере одной из указанных управляющих команд для беспилотных летательных аппаратов и соединенные с возможностью обмена данными с модулем управления с обеспечением возможности выдачи указанной введенной управляющей команды в модуль управления транспортного средства.
10. Транспортное средство по любому из пп. 1, 2, в котором фюзеляж дополнительно снабжен по меньшей мере одним источником питания, а модуль хранения дополнительно снабжен по меньшей мере одним зарядным устройством, электрически соединенным с указанным источником питания и обеспечивающим возможность подключения к указанному источнику питания по меньшей мере одного из размещенных в модуле хранения беспилотных летательных аппаратов с обеспечением возможности восполнения запаса хода указанного беспилотного летательного аппарата.
11. Транспортное средство по п. 10, в котором каждое из указанных зарядных устройств представляет собой беспроводное зарядное устройство, проводное зарядное устройство или зарядную док-станцию.
12. Транспортное средство по п. 10, в котором указанный по меньшей мере один источник питания содержит каждый по меньшей мере одно из группы, содержащей: аккумуляторную батарею, генератор на основе двигателя внутреннего сгорания, генератор на основе водородного двигателя и солнечную батарею.
13. Транспортное средство по п. 1, в котором по меньшей мере один из указанных модулей стыковки представляет собой стыковочную конструкцию, снабженную по меньшей мере одним тяговым сцепным элементом, выполненным каждый с возможностью разъемного сцепления по меньшей мере с одним из беспилотных летательных аппаратов или с возможностью захвата по меньшей мере одного из беспилотных летательных аппаратов.
14. Транспортное средство по п. 13, в котором стыковочная конструкция содержит посадочные площадки, каждый из указанных тяговых сцепных элементов установлен на одной из указанных посадочных площадок, а модуль управления дополнительно выполнен с возможностью управления работой каждого из указанных тяговых сцепных элементов с обеспечением возможности приведения его в действие при размещении беспилотного летательного аппарата на посадочной площадке, соответствующей указанному тяговому сцепному элементу, или в области стыковки, соответствующей указанной посадочной площадке.
15. Транспортное средство по п. 14, в котором фюзеляж дополнительно снабжен роботизированным манипулятором, находящимся под управлением модуля управления и выполненным с возможностью захвата по меньшей мере одного из выпущенных беспилотных летательных аппаратов с обеспечением возможности размещения каждого из указанных захваченных беспилотных летательных аппаратов на одной из указанных посадочных площадок.
16. Транспортное средство по п. 15, в котором фюзеляж дополнительно снабжен устройством фиксации изображений, выполненным с возможностью фиксации изображений в поле обзора в реальном времени с обеспечением возможности выявления по меньшей мере одного из беспилотных летательных аппаратов в указанном поле обзора и дополнительно соединенным с модулем управления с возможностью выдачи на него данных о выявленных беспилотных летательных аппаратах, а модуль управления дополнительно выполнен с возможностью приведения в действие роботизированного манипулятора в ответ на указанные данные о выявленных беспилотных летательных аппаратах с обеспечением возможности захвата по меньшей мере одного из указанных выявленных беспилотных летательных аппаратов.
17. Транспортное средство по п. 1, в котором по меньшей мере один из указанных модулей стыковки представляет собой выдвижную сцепную конструкцию, снабженную тяговыми сцепными элементами, выполненными каждый с возможностью разъемного сцепления по меньшей мере с одним из выпущенных беспилотных летательных аппаратов, и выполненную с возможностью по меньшей мере частичного выдвижения из фюзеляжа с обеспечением возможности высвобождения тяговых сцепных элементов в зависимости от степени выдвижения, при этом модуль управления дополнительно выполнен с возможностью управления работой выдвижной сцепной конструкции с обеспечением возможности регулирования степени ее выдвижения.
18. Транспортное средство по п. 17, в котором указанная сцепная конструкция дополнительно выполнена с возможностью ее по меньшей мере частичного после полного выдвижения с обеспечением возможности удаления высвобожденных тяговых сцепных элементов друг от друга на расстояние, зависящее от степени развертывания, при этом модуль управления дополнительно выполнен с возможностью регулирования степени развертывания сцепной конструкции.
19. Транспортное средство по п. 17, в котором указанная сцепная конструкция дополнительно выполнена с возможностью ее по меньшей мере частичного раздвижения после полного выдвижения с обеспечением возможности удаления высвобожденных тяговых сцепных элементов друг от друга на расстояние, зависящее от степени раздвижения, при этом модуль управления дополнительно выполнен с возможностью регулирования степени раздвижения сцепной конструкции.
20. Транспортное средство по п. 1, в котором по меньшей мере один из указанных модулей стыковки по меньшей мере частично встроен в фюзеляж и содержит каждый по меньшей мере один тяговый сцепной элемент, выполненный каждый с возможностью выдвижения из фюзеляжа с обеспечением возможности разъемного сцепления по меньшей мере с одним из беспилотных летательных аппаратов, а модуль управления дополнительно выполнен с возможностью управления выдвижением указанных тяговых сцепных элементов в каждом из указанных модулей стыковки.
21. Транспортное средство по п. 20, в котором фюзеляж дополнительно снабжен устройством обнаружения, выполненным с возможностью обнаружения по меньшей мере одного из беспилотных летательных аппаратов в зоне действия устройства обнаружения и дополнительно соединенным с модулем управления с возможностью выдачи на него данных об обнаруженных беспилотных летательных аппаратах, а модуль управления дополнительно обеспечивает возможность приведения в действие по меньшей мере одного из выдвижных тяговых сцепных элементов в ответ на указанные данные об обнаруженных беспилотных летательных аппаратах с обеспечением выдвижения указанного, приведенного в действие тягового сцепного элемента из фюзеляжа.
22. Транспортное средство по п. 1, в котором по меньшей мере один из указанных модулей стыковки по меньшей мере частично встроен в фюзеляж и содержит каждый по меньшей мере один тяговый сцепной элемент, выполненный каждый с возможностью разъемного сцепления по меньшей мере с одним из беспилотных летательных аппаратов с обеспечением вытягивания указанного тягового сцепного элемента из фюзеляжа.
23. Транспортное средство по п. 1, в котором по меньшей мере один из указанных модулей хранения представляет собой стыковочную стойку, закрепленную на фюзеляже и выполненную с возможностью съемного насаживания на нее беспилотных летательных аппаратов с образованием стопы.
24. Транспортное средство по п. 23, в котором фюзеляж дополнительно снабжен роботизированным манипулятором, находящимся под управлением модуля управления и выполненным с возможностью разъемного захвата одного из беспилотных летательных аппаратов с обеспечением возможности его насаживания на стыковочную стойку.
25. Транспортное средство по п. 24, в котором фюзеляж дополнительно снабжен устройством обнаружения, выполненным с возможностью обнаружения по меньшей мере одного из выпущенных беспилотных летательных аппаратов в зоне действия устройства обнаружения и дополнительно соединенным с модулем управления с возможностью выдачи на него данных об обнаруженных беспилотных летательных аппаратах, а модуль управления дополнительно выполнен с возможностью приведения в действие роботизированного манипулятора в ответ на указанные данные об обнаруженных беспилотных летательных аппаратах с обеспечением возможности последовательного захвата каждого из указанных обнаруженных беспилотных летательных аппаратов.
26. Транспортное средство по п. 1, в котором по меньшей мере один из указанных модулей стыковки представляет собой захват, находящийся под управлением модуля управления, фюзеляж дополнительно снабжен устройством фиксации изображений, выполненным с возможностью фиксации изображений в поле обзора в реальном времени с обеспечением возможности выявления по меньшей мере одного из выпущенных беспилотных летательных аппаратов в указанном поле обзора и дополнительно соединенным с модулем управления с возможностью выдачи на него данных о выявленных беспилотных летательных аппаратах, а модуль управления дополнительно выполнен с возможностью приведения в действие захвата в ответ на указанные данные о выявленных беспилотных летательных аппаратах с обеспечением возможности разъемного захвата указанного выявленного беспилотного летательного аппарата.
27. Транспортное средство по п. 1, в котором фюзеляж дополнительно снабжен одним или более крыльями и/или дополнительно содержит по меньшей мере один авиационный двигатель, находящийся под управлением модуля управления и установленный на фюзеляже с обеспечением возможности перемещения транспортного средства по воздуху.
28. Транспортное средство по п. 27, в котором модуль управления дополнительно выполнен с возможностью приема в реальном времени данных о запасе хода от каждого из соединенных с фюзеляжем беспилотных летательных аппаратов и каждого из размещенных в модуле хранения беспилотных летательных аппаратов и дополнительно выполнен с возможностью приведения в действие указанного авиационного двигателя при перемещении транспортного средства по воздуху в случае выявления критического запаса хода для указанного транспортного средства, не позволяющего продолжать перемещение транспортного средства по воздуху в соответствии с маршрутом следования, на основании указанных данных о запасе хода.
29. Транспортное средство по п. 1, в котором фюзеляж дополнительно снабжен по меньшей мере одним несущим винтом или движителем, выполненным с возможностью перемещения транспортного средства по воздуху при приведении его в действие, и дополнительно содержит по меньшей мере один двигатель, находящийся под управлением модуля управления и функционально соединенный с каждым из указанных несущих винтов или движителей с обеспечением приведения его в действие.
30. Транспортное средство по п. 29, в котором модуль управления дополнительно выполнен с возможностью приема в реальном времени данных о запасе хода от каждого из соединенных с фюзеляжем беспилотных летательных аппаратов и каждого из размещенных в модуле хранения беспилотных летательных аппаратов и дополнительно выполнен с возможностью приведения в действие указанного несущего винта или движителя при перемещении транспортного средства по воздуху в случае выявления критического запаса хода для указанного транспортного средства, не позволяющего продолжать перемещение транспортного средства по воздуху в соответствии с маршрутом следования, на основании указанных данных о запасе хода.
31. Транспортное средство по п. 1, в котором фюзеляж снабжен колесами и содержит двигатель, функционально соединенный с колесами с возможностью их привода для перемещения транспортного средства, а модуль управления соединен с указанным двигателем с возможностью приведения его в действие.
32. Транспортное средство по п. 31, в котором модуль управления дополнительно выполнен с возможностью приема в реальном времени данных о запасе хода от каждого из соединенных с фюзеляжем беспилотных летательных аппаратов и каждого из размещенных в модуле хранения беспилотных летательных аппаратов и дополнительно выполнен с возможностью посадки транспортного средства с обеспечением возможности приведения в действие указанного двигателя в случае выявления критического запаса хода для указанного транспортного средства, не позволяющего продолжать перемещение транспортного средства по воздуху в соответствии с маршрутом следования, на основании указанных данных о запасе хода.
33. Транспортное средство по п. 1, в котором модуль управления выполнен с возможностью получения данных об изменении веса полезной нагрузки в фюзеляже на каждой из остановок в соответствии с заданным маршрутом следования и дополнительно выполнен с возможностью приема в реальном времени данных о запасе хода от каждого из соединенных с фюзеляжем беспилотных летательных аппаратов и каждого из размещенных в модуле хранения беспилотных летательных аппаратов, при этом модуль управления дополнительно выполнен с возможностью выявления географической области в соответствии с маршрутом следования, в которой количество беспилотных летательных аппаратов с запасом хода, позволяющим продолжать перемещение транспортного средства по воздуху с указанной измененной полезной нагрузкой, ниже порогового значения, и дополнительно выполнен с возможностью направления запроса по меньшей мере на одну из парковочных станций для хранения беспилотных летательных аппаратов, соответствующую указанной выявленной географической области, для направления по меньшей мере одного дополнительного беспилотного летательного аппарата в указанную географическую область с обеспечением возможности перехода указанного дополнительного беспилотного летательного аппарата под управление модуля управления для взаимодействия с модулем стыковки.
34. Транспортная система, содержащая:
транспортное средство по любому из пп. 1-33, дополнительно снабженное модулем определения местоположения, выполненным с возможностью определения географических координат транспортного средства в реальном времени,
беспилотные летательные аппараты, используемые указанным транспортным средством,
парковочные станции, выполненные с возможностью хранения дополнительных беспилотных летательных аппаратов, и
сервер, выполненный с возможностью управления работой указанных дополнительных беспилотных летательных аппаратов на указанных парковочных станциях и соединенный с возможностью обмена данными с модулем управления транспортного средства с обеспечением возможности приема от него данных о маршруте следования транспортного средства,
при этом модуль управления дополнительно выполнен с возможностью направления запроса на сервер для предоставления по меньшей мере одного дополнительного летательного аппарата в заданной географической области, соответствующей указанному маршруту следования, а
сервер дополнительно выполнен с возможностью приема координат транспортного средства от модуля управления транспортного средства в реальном времени для выявления по меньшей мере одной из указанных парковочных станций, соответствующих указанному запросу, с обеспечением возможности направления по меньшей мере одного дополнительного летательного аппарата из указанных выявленных парковочных станций в момент времени, в который близость транспортного средства к указанной географической области соответствует пороговому значению, для взаимодействия каждого из указанных дополнительных летательных аппаратов с модулем стыковки транспортного средства.
35. Транспортная система по п. 34, в которой модуль хранения снабжен зарядным устройством, а указанные беспилотные летательные аппараты транспортного средства выполнены с возможностью последовательного или параллельного электрического соединения друг с другом при размещении в указанном модуле хранения с обеспечением возможности их подключения к указанному зарядному устройству для одновременного восполнения их запаса хода.
36. Транспортная система по п. 34, в которой по меньшей мере один из указанных беспилотных летательных аппаратов транспортного средства снабжен тяговым сцепным элементом, выполненным с возможностью разъемного взаимодействия с модулем стыковки.
37. Транспортная система по п. 34, в которой по меньшей мере два из указанных беспилотных летательных аппаратов транспортного средства выполнены с возможностью механического соединения друг с другом с образованием составного беспилотного летательного аппарата, выполненного с возможностью разъемного взаимодействия по меньшей мере с одним из модулей стыковки.
38. Транспортная система по п. 37, в которой указанные взаимно соединяемые беспилотные летательные аппараты выполнены с возможностью механического соединения друг с другом в горизонтальной плоскости и/или вертикальной плоскости.
39. Транспортная система по любому из пп. 37, 38, в которой указанные взаимно соединяемые беспилотные летательные аппараты выполнены с возможностью механического соединения друг с другом в ответ на управляющие команды от модуля управления транспортного средства или сервера.
40. Транспортная система по п. 34, в которой сервер обеспечивает возможность резервирования указанного по меньшей мере одного дополнительного летательного аппарата на каждой из указанных парковочных станций на заданный период времени в соответствии с указанным запросом.
41. Транспортная система по п. 34, в которой модуль управления обеспечивает возможность направления по меньшей мере части из соединенных с фюзеляжем беспилотных летательных аппаратов, запас хода которых в указанной географической области меньше порогового значения, по меньшей мере на одну из парковочных станций, соответствующих указанной географической области.
42. Транспортная система по п. 40, в которой каждая из указанных парковочных станций снабжена зарядными устройствами для восполнения запаса хода беспилотных летательных аппаратов, модуль управления выполнен с возможностью выдачи данных о направленных беспилотных летательных аппаратах на сервер, а сервер в ответ на указанные данные модуля управления дополнительно выполнен с возможностью перехвата управления указанными направленными беспилотными летательными аппаратами с обеспечением возможности подключения каждого из них к одному из зарядных устройств на парковочной станции, соответствующей указанному направленному беспилотному летательному аппарату, для восполнения запаса хода указанного перехваченного беспилотного летательного аппарата.
43. Транспортная система по п. 34, в которой модуль управления выполнен с возможностью получения данных об изменении веса полезной нагрузки в фюзеляже на каждой из остановок в соответствии с маршрутом следования и дополнительно выполнен с возможностью определения количества беспилотных летательных аппаратов для обеспечения запаса хода транспортного средства, позволяющего продолжать перемещение транспортного средства от указанной остановки до следующей остановки в соответствии с указанным маршрутом следования, с учетом указанного измененного веса полезной нагрузки и заданного снаряженного веса транспортного средства.
44. Транспортная система по п. 34, в которой фюзеляж транспортного средства дополнительно снабжен устройством обнаружения, соединенным с возможностью обмена данными с модулем управления и выполненным с возможностью обнаружения указанных дополнительных летательных аппаратов в зоне действия устройства обнаружения, а модуль управления в ответ на указанные показания устройства обнаружения обеспечивает возможность выхода из взаимодействия с модулем стыковки беспилотных летательных аппаратов, запас хода которых ниже порогового значения, в количестве, соответствующем количеству указанных обнаруженных дополнительных летательных аппаратов, с обеспечением возможности их размещения в модуле хранения и/или возможности их направления по меньшей мере на одну из парковочных станций, соответствующих указанной географической области.
45. Транспортная система по п. 34, в которой
каждая из указанных парковочных станций дополнительно выполнена с возможностью размещения с обеспечением возможности хранения и/или зарядки в ней по меньшей мере одного транспортного средства и с возможностью выдачи данных о свободных местах для размещения транспортных средств на указанный сервер в ответ на запрос сервера,
модуль управления выполнен с возможностью выдачи запроса на сервер на остановку транспортного средства в парковочной станции,
сервер в ответ на указанный запрос об остановке дополнительно выполнен с возможностью
направления запроса в парковочные станции, соответствующие области местоположения транспортного средства, для выявления по меньшей мере одной парковочной станции со свободным местом для размещения транспортного средства, и
выдачи управляющих инструкций на модуль управления с обеспечением
возможности направления указанного транспортного средства под управлением модуля управления к одной из выявленных свободных парковочных станций или
возможности перехвата управления указанным транспортным средством с обеспечением возможности его направления к одной из выявленных свободных парковочных станций.
46. Транспортная система по п. 45, в которой
каждая из указанных парковочных станций снабжена зарядными устройствами для восполнения запаса хода беспилотных летательных аппаратов и выполнена с возможностью выдачи данных о свободных зарядных устройствах на указанный сервер в ответ на запрос сервера,
модуль управления дополнительно выполнен с возможностью выдачи запроса на сервер на восполнение запаса хода беспилотных летательных аппаратов,
сервер в ответ на указанный запрос о восполнении запаса хода дополнительно выполнен с возможностью
направления запроса в указанную свободную парковочную станцию для выявления количества свободных зарядных устройств для восполнения запаса хода беспилотных летательных аппаратов транспортного средства, и
выдачи управляющих инструкций на модуль управления с обеспечением
возможности направления по меньшей мере одного из требующих восполнения запаса хода беспилотных летательных аппаратов транспортного средства под управлением модуля управления к одному из выявленных свободных зарядных устройств при размещении транспортного средства в указанной свободной парковочной станции или
возможности перехвата управления указанным, требующим восполнения запаса хода беспилотным летательным аппаратом с обеспечением возможности его направления к одному из выявленных свободных зарядных устройств при размещении транспортного средства в указанной свободной парковочной станции.
47. Транспортная система по п. 46, в которой
каждый из беспилотных летательных аппаратов транспортного средства дополнительно выполнен с возможностью выдачи данных о запасе хода на модуль управления в ответ на запрос модуля управления,
модуль управления дополнительно выполнен с возможностью установления количества разряженных беспилотных летательных аппаратов транспортного средства, запас хода которых меньше порогового значения, на основании указанных данных о запасе хода,
при этом указанный запрос о восполнении запаса хода предусматривает восполнение запаса хода по меньшей мере одного из указанных разряженных беспилотных летательных аппаратов при размещении транспортного средства в указанной свободной парковочной станции.
48. Транспортная система по п. 47, в которой модуль управления выполнен с возможностью генерирования указанного запроса на восполнение запаса хода в случае, если зарядные устройства транспортного средства не способны восполнить запас хода по меньшей мере части из указанных разряженных беспилотных летательных аппаратов, необходимую для продолжения перемещения транспортного средства, за период времени, соответствующий плановой продолжительности остановки транспортного средства в указанной свободной парковочной станции, при этом указанный запрос на восполнение запаса хода предусматривает восполнение запаса хода указанной необходимой части разряженных беспилотных летательных аппаратов.
49. Транспортная система по п. 48, в которой модуль управления дополнительно выполнен с возможностью
определения количества недостающих заряженных беспилотных летательных аппаратов транспортного средства путем сравнения предварительно определенного количества беспилотных летательных аппаратов транспортного средства, требуемых для продолжения перемещения транспортного средства до следующей плановой остановки транспортного средства в соответствии с маршрутом следования, и количества беспилотных летательных аппаратов, заряженных на момент завершения указанного периода остановки, и
выдачи запроса на сервер на предоставление дополнительных летательных аппаратов в количестве, соответствующем указанному определенному количеству недостающих заряженных беспилотных летательных аппаратов, по меньшей мере на период времени, соответствующий перемещению транспортного средства до указанной следующей остановки.
50. Транспортная система, содержащая:
транспортные средства по любому из пп. 1-33, дополнительно снабженные каждое модулем определения местоположения, выполненным с возможностью определения географических координат указанного транспортного средства в реальном времени,
группы беспилотных летательных аппаратов, используемые каждая одним из указанных транспортных средств,
сервер, соединенный с возможностью обмена данными с модулем управления каждого из указанных транспортных средств с обеспечением возможности приема от него данных о маршруте следования транспортного средства и возможности приема от него координат транспортного средства в реальном времени, при этом
каждый из беспилотных летательных аппаратов в каждом из указанных транспортных средств дополнительно выполнен с возможностью выдачи данных о запасе хода на модуль управления в ответ на запрос модуля управления, соответствующий указанному беспилотному летательному аппарату,
модуль управления в каждом из указанных транспортных средств дополнительно выполнен с возможностью
определения количества свободных зарядных мест в модуле хранения указанного транспортного средства, в которых обеспечена возможность восполнения запаса хода беспилотных летательных аппаратов, с обеспечением возможности выдачи данных о свободных зарядных местах модуля хранения на сервер,
установления количества разряженных беспилотных летательных аппаратов указанного транспортного средства, запас хода которых меньше порогового значения, на основании указанных данных о запасе хода, и
выдачи запроса на сервер на предоставление дополнительных летательных аппаратов в количестве, соответствующем по меньшей мере части от указанного установленного количества разряженных беспилотных летательных аппаратов транспортного средства, а
сервер в ответ на указанный запрос на предоставление дополнительных летательных аппаратов дополнительно выполнен с возможностью
установления другого транспортного средства из указанных транспортных средств, положение которого соответствует координатам указанного транспортного средства и в модуле хранения которого количество свободных зарядных мест соответствует по меньшей мере частично количеству разряженных беспилотных летательных аппаратов указанного транспортного средства, или
установления по меньшей мере двух других транспортных средств из указанных транспортных средств, положение каждого из которых соответствует координатам указанного транспортного средства и в модулях хранения которых суммарное количество свободных зарядных мест соответствует количеству разряженных беспилотных летательных аппаратов указанного транспортного средства,
и дополнительно выполнен с возможностью выдачи управляющих инструкций на модуль управления указанного транспортного средства с обеспечением возможности
направления указанных разряженных беспилотных летательных аппаратов под управлением модуля управления указанного транспортного средства к указанным свободным зарядным местам каждого установленного другого транспортного средства или
перехвата управления указанными разряженными беспилотными летательными аппаратами с обеспечением возможности их направления к указанным свободным зарядным местам каждого установленного другого транспортного средства.
51. Транспортная система по п. 50, в которой каждое из зарядных мест модуля хранения в каждом из указанных транспортных средств снабжено зарядным устройством для восполнения запаса хода беспилотного летательного аппарата, а каждый из указанных разряженных беспилотных летательных аппаратов выполнен с возможностью подключения к зарядному устройству при размещении на свободном зарядном месте с обеспечением возможности восполнения его запаса хода и возможности возврата к указанному транспортному средству в заряженном состоянии под управлением модуля управления указанного транспортного средства или под управлением сервера.
52. Транспортная система по любому из пп. 50, 51, в которой каждое другое транспортное средство, устанавливаемое сервером в ответ на запрос на предоставление дополнительных летательных аппаратов, дополнительно соответствует условию, согласно которому в момент завершения процесса восполнения запаса хода соответствующих разряженных беспилотных летательных аппаратов указанное другое транспортное средство в соответствии с его маршрутом следования находится в области местоположения транспортного средства, на которое должны вернуться указанные заряженные беспилотные летательные аппараты.
53. Транспортная система по п. 52, в которой модуль управления дополнительно выполнен с возможностью выдачи управляющих команд на указанные вернувшиеся беспилотные летательные аппараты с обеспечением возможности взаимодействия по меньшей мере части из них с модулем стыковки транспортного средства, возможности размещения по меньшей мере части из них в модуле хранения транспортного средства и/или возможности замены по меньшей мере части из беспилотных летательных аппаратов, соединенных с фюзеляжем транспортного средства.
54. Транспортная система, содержащая:
транспортные средства по любому из пп. 1-33, дополнительно снабженные каждое модулем определения местоположения, выполненным с возможностью определения географических координат указанного транспортного средства в реальном времени,
группы беспилотных летательных аппаратов, используемые каждая одним из указанных транспортных средств,
сервер, соединенный с возможностью обмена данными с модулем управления каждого из указанных транспортных средств с обеспечением возможности приема от него данных о маршруте следования транспортного средства, координат транспортного средства в реальном времени и данных о количестве незадействованных беспилотных летательных аппаратов транспортного средства в модуле хранения, которые не потребуются указанному транспортному средству при перемещении в соответствии со своим маршрутом следования, при этом
каждый из беспилотных летательных аппаратов в каждом из указанных транспортных средств дополнительно выполнен с возможностью выдачи данных о запасе хода на модуль управления в реальном времени,
модуль управления в каждом из указанных транспортных средств дополнительно выполнен с возможностью
установления количества недостающих заряженных беспилотных летательных аппаратов из группы беспилотных летательных аппаратов транспортного средства, соответствующей указанному транспортному средству, для обеспечения запаса хода для указанного транспортного средства, позволяющего продолжить перемещение указанного транспортного средства до следующей остановки в соответствии с маршрутом следования транспортного средства, на основании данных о запасе хода, соответствующих указанному транспортному средству, и данных о целевом количестве заряженных беспилотных летательных аппаратов, позволяющем перемещать указанное транспортное средство между остановками в соответствии с его маршрутом следования,
установления наличия свободных стыковочных мест в модуле стыковки указанного транспортного средства, в которых обеспечена возможность соединения беспилотных летательных аппаратов с фюзеляжем, в количестве, соответствующем указанному установленному количеству недостающих заряженных беспилотных летательных аппаратов, с обеспечением возможности выдачи данных о свободных стыковочных местах модуля стыковки на сервер, и
выдачи на сервер запроса на предоставление дополнительных летательных аппаратов в количестве, соответствующем по меньшей мере части от указанного установленного количества недостающих заряженных беспилотных летательных аппаратов, а
сервер в ответ на указанный запрос на предоставление дополнительных летательных аппаратов дополнительно выполнен с возможностью
установления другого транспортного средства из указанных транспортных средств, положение которого соответствует координатам указанного транспортного средства и количество незадействованных беспилотных летательных аппаратов которого соответствует указанному количеству недостающих заряженных беспилотных летательных аппаратов, или
установления по меньшей мере двух других транспортных средств из указанных транспортных средств, положение каждого из которых соответствует координатам указанного транспортного средства и суммарное количество незадействованных беспилотных летательных аппаратов которых соответствует указанному количеству недостающих заряженных беспилотных летательных аппаратов,
и дополнительно выполнен с возможностью выдачи управляющих инструкций на модуль управления каждого установленного другого транспортного средства с обеспечением возможности
направления каждого из незадействованных беспилотных летательных аппаратов под управлением модуля управления указанного другого транспортного средства к одному из указанных свободных стыковочных мест в модуле стыковки или
перехвата управления незадействованными беспилотными летательными аппаратами с обеспечением возможности направления каждого из них к одному из указанных свободных стыковочных мест в модуле стыковки.
55. Транспортная система по п. 54, в которой в случае если количество свободных стыковочных мест в модуле стыковки транспортного средства не соответствует количеству недостающих заряженных беспилотных летательных аппаратов, то модуль управления указанного транспортного средства дополнительно выполнен с возможностью направления управляющих инструкций на выпущенные беспилотные летательные аппараты, соответствующие по количеству недостающему количеству свободных стыковочных мест и имеющие наименьший запас хода, с обеспечением возможности их размещения в модуле хранения указанного транспортного средства.
56. Транспортная система, содержащая:
транспортное средство по любому из пп. 1-33, дополнительно снабженное модулем определения местоположения, выполненным с возможностью определения географических координат транспортного средства в реальном времени,
беспилотные летательные аппараты, используемые указанным транспортным средством, и
парковочные станции, каждая из которых выполнена с возможностью хранения и/или зарядки дополнительных беспилотных летательных аппаратов и с возможностью управления работой указанных дополнительных беспилотных летательных аппаратов, причем указанные парковочные станции дополнительно выполнены с возможностью обмена данными с модулем управления транспортного средства с обеспечением возможности приема от него данных о маршруте следования транспортного средства,
при этом модуль управления дополнительно выполнен с возможностью направления запроса по меньшей мере на одну из указанных парковочных станций для предоставления по меньшей мере одного дополнительного беспилотного летательного аппарата в географической области, соответствующей указанному маршруту следования, а
указанная по меньшей мере одна парковочная станция в ответ на указанный запрос обеспечивает возможность направления указанного по меньшей мере одного дополнительного летательного аппарата в момент времени, в который близость транспортного средства к указанной географической области в соответствии с указанным маршрутом следования соответствует пороговому значению, для взаимодействия каждого из указанных дополнительных летательных аппаратов с модулем стыковки транспортного средства.
57. Транспортная система, содержащая:
транспортное средство по любому из пп. 1-33,
беспилотные летательные аппараты, используемые указанным транспортным средством,
парковочные станции, выполненные с возможностью хранения и/или зарядки дополнительных беспилотных летательных аппаратов, и
сервер, выполненный с возможностью управления работой указанных дополнительных беспилотных летательных аппаратов на указанных парковочных станциях и соединенный с возможностью обмена данными с модулем управления транспортного средства,
при этом модуль управления дополнительно выполнен с возможностью направления запроса на сервер для предоставления по меньшей мере одного дополнительного летательного аппарата, а
сервер дополнительно выполнен с возможностью выявления по меньшей мере одной из указанных парковочных станций, соответствующей указанному запросу, с обеспечением возможности направления по меньшей мере одного дополнительного летательного аппарата из указанных выявленных парковочных станций в момент времени, в который близость транспортного средства к указанным выявленным парковочным станциям соответствует пороговому значению, для взаимодействия каждого из указанных дополнительных летательных аппаратов с модулем стыковки транспортного средства.
58. Транспортная система, содержащая:
транспортное средство по любому из пп. 1-33,
беспилотные летательные аппараты, используемые указанным транспортным средством, и
парковочные станции, каждая из которых выполнена с возможностью хранения и/или зарядки дополнительных беспилотных летательных аппаратов и с возможностью управления работой указанных дополнительных беспилотных летательных аппаратов, причем указанные парковочные станции дополнительно выполнены с возможностью обмена данными с модулем управления транспортного средства,
при этом модуль управления дополнительно выполнен с возможностью направления запроса по меньшей мере на одну из указанных парковочных станций для предоставления по меньшей мере одного дополнительного беспилотного летательного аппарата, а
указанная по меньшей мере одна парковочная станция дополнительно в ответ на указанный запрос обеспечивает возможность направления указанного по меньшей мере одного дополнительного летательного аппарата в момент времени, в который близость транспортного средства к этой парковочной станции соответствует пороговому значению, для взаимодействия каждого из указанных дополнительных летательных аппаратов с модулем стыковки транспортного средства.
59. Способ перемещения транспортного средства по любому из пп. 1-33, включающий следующие этапы, согласно которым:
выдают управляющие команды на беспилотные летательные аппараты,
в ответ на указанные управляющие команды направляют указанные беспилотные летательные аппараты к модулю стыковки транспортного средства с обеспечением взаимодействия с ним для соединения указанных направленных беспилотных летательных аппаратов с фюзеляжем транспортного средства, и
приводят в действие, посредством модуля управления транспортного средства, указанные присоединенные беспилотные летательные аппараты с обеспечением перемещения транспортного средства,
принимают, посредством модуля управления, данные о запасе хода от каждого из беспилотных летательных аппаратов, перемещающих транспортное средство, в реальном времени,
выявляют, посредством модуля управления, разряженный беспилотный летательный аппарат, запас хода которого меньше порогового значения, в указанных беспилотных летательных аппаратах на основании указанных данных о запасе хода при перемещении транспортного средства,
направляют заряженный беспилотный летательный аппарат к модулю стыковки транспортного средства для замены указанного разряженного беспилотного летательного аппарата,
выдают, посредством модуля управления, управляющие команды на указанный разряженный беспилотный летательный аппарат с обеспечением его вывода из взаимодействия с модулем стыковки транспортного средства для отстыковки от фюзеляжа транспортного средства и
выдают, посредством модуля управления, управляющие команды на указанный заряженный беспилотный летательный аппарат с обеспечением взаимодействия с указанным модулем стыковки транспортного средства для соединения указанного заряженного беспилотного летательного аппарата с фюзеляжем транспортного средства.
60. Способ по п. 59, согласно которому дополнительно направляют указанный отстыкованный беспилотный летательный аппарат в модуль хранения данного транспортного средства, или парковочную станцию, или модуль хранения другого транспортного средства с обеспечением восполнения запаса хода указанного беспилотного транспортного средства.
61. Способ по п. 59, согласно которому указанный заряженный беспилотный летательный аппарат, направляемый к модулю стыковки данного транспортного средства, выпускают из модуля хранения транспортного средства, и/или парковочной станции, и/или модуля хранения другого транспортного средства.
62. Способ по любому из пп. 59-61, согласно которому для остановки транспортного средства изменяют, посредством модуля управления, режим работы беспилотных летательных аппаратов, перемещающих указанное транспортное средство, с обеспечением отключения, посредством модуля управления, указанных беспилотных летательных аппаратов после остановки транспортного средства.
63. Способ по любому из пп. 59-61, согласно которому при остановке транспортного средства беспилотные летательные аппараты, перемещающие указанное транспортное средство, направляют, посредством модуля управления, по меньшей мере частично в модуль хранения указанного транспортного средства, и/или по меньшей мере частично в одну или более парковочных станций, соответствующих области остановки транспортного средства, и/или по меньшей мере частично в модули хранения одного или более других транспортных средств, соответствующих области остановки транспортного средства, с обеспечением восполнения запаса хода соответствующих беспилотных летательных аппаратов с последующим образованием соответствующего множества подзаряженных беспилотных летательных аппаратов.
64. Способ по п. 63, согласно которому указанные подзаряженные беспилотные летательные аппараты направляют обратно к модулю стыковки транспортного средства с обеспечением возможности входа во взаимодействие с ним для стыковки с фюзеляжем транспортного средства.
65. Способ по любому из пп. 59-64, согласно которому
сообщают модулю управления транспортного средства маршрут следования транспортного средства, снаряженный вес транспортного средства и вес полезной нагрузки транспортного средства,
определяют, посредством модуля управления, географическую область в соответствии с маршрутом следования, в которой запас хода транспортного средства, обеспечиваемый беспилотными летательными аппаратами транспортного средства, соответствует предельному уровню, на основании указанных, сообщенных модулю управления данных, и
выдают, посредством модуля управления, запрос на сервер для резервирования дополнительных или заменяющих беспилотных летательных аппаратов для указанного транспортного средства в одной или более парковочных станций, соответствующих указанной географической области, и/или модулях хранения одного или более других транспортных средств, соответствующих указанной географической области, в количестве, обеспечивающем запас хода транспортного средства, позволяющий транспортному средству по меньшей мере частично завершить или продлить маршрут следования.
66. Способ по любому из пп. 59-64, согласно которому
сообщают модулю управления транспортного средства маршрут следования транспортного средства с координатами остановок, снаряженный вес транспортного средства и вес полезной нагрузки транспортного средства на каждом участке маршрута следования между двумя последовательными остановками,
определяют, посредством модуля управления, географическую область по меньшей мере на одном из участков маршрута следования, в которой запас хода транспортного средства, обеспечиваемый беспилотными летательными аппаратами транспортного средства, соответствует предельному уровню, на основании указанных, сообщенных модулю управления данных, и
выдают, посредством модуля управления, запрос на сервер для резервирования дополнительных или заменяющих беспилотных летательных аппаратов для указанного транспортного средства в одной или более парковочных станций, соответствующих указанной географической области, и/или модулях хранения одного или более других транспортных средств, соответствующих указанной географической области, в количестве, обеспечивающем запас хода транспортного средства, позволяющий транспортному средству по меньшей мере частично завершить указанный участок маршрута следования.
67. Способ по любому из пп. 59-64, согласно которому
сообщают модулю управления транспортного средства маршрут следования транспортного средства с координатами остановок, снаряженный вес транспортного средства и вес полезной нагрузки транспортного средства на каждом участке маршрута следования между двумя последовательными остановками,
выявляют, посредством модуля управления, по меньшей мере один из участков маршрута следования, на котором количество беспилотных летательных аппаратов транспортного средства превышает расчетное количество, необходимое для завершения транспортным средством указанного участка маршрута следования, с обеспечением выдачи на сервер данных о количестве незадействованных беспилотных летательных аппаратов на указанном участке маршрута следования транспортного средства, и
в ответ на управляющие инструкции сервера направляют по меньшей мере часть из указанных незадействованных беспилотных летательных аппаратов в одну или более парковочных станций, соответствующих указанному участку маршрута следования, и/или в модули стыковки одного или более других транспортных средств, соответствующих указанному участку маршрута следования.
68. Способ по п. 59, включающий этап, согласно которому предварительно перемещают указанное транспортное средство к парковочной станции или другому транспортному средству, при этом управляющие команды выдают на беспилотные летательные аппараты, размещенные соответственно в указанной парковочной станции или модуле хранения указанного другого транспортного средства.
69. Способ по п. 59, включающий этап, согласно которому управляющие команды выдают на беспилотные летательные аппараты, размещенные в модуле хранения того же самого транспортного средства, и/или беспилотные летательные аппараты, размещенные по меньшей мере на одной парковочной станции, и/или беспилотные летательные аппараты, размещенные в модуле хранения по меньшей мере одного другого транспортного средства.
| UA 99079 C2, 10.07.2012 | |||
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Комплекс беспилотных летательных средств на базе аэростатического летательного аппарата | 2018 |
|
RU2681966C1 |
| ПОПЛАВКОВЫЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 0 |
|
SU182345A1 |
| US 10286925 B2, 14.05.2019. | |||

