ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к летательным аппаратам, а в частности, к способу и устройству для управления летательным аппаратом. Более конкретно, настоящее изобретение относится к способу и устройству для более точного определения аэродинамических углов, используемых при управлении летательным аппаратом.
[002] Пилот, управляющий летательным аппаратом, принимает информацию о состоянии летательного аппарата. Эта информация используется для внесения изменений в полет летательного аппарата. Например, один тип принимаемой информации представляет собой угол атаки. Угол атаки влияет на величину подъемной силы, которую крыло сообщает летательному аппарату. Например, при увеличении угла атаки подъемная сила увеличивается до получения максимального коэффициента подъемной силы. Угол атаки при максимальном коэффициенте подъемной силы называют срывным углом атаки.
[003] При слишком большом увеличении угла атаки летательный аппарат может совершить сваливание. Углом, при котором летательный аппарат может совершить сваливание, является угол атаки, который больше срывного угла атаки. Угол атаки используется для предоставления информации в кабину экипажа и выдачи экипажу предупреждения, чтобы улучшить его информированность о состоянии самолета в отношении предельных значений рабочих характеристик.
[004] Вследствие этого, было бы желательным иметь способ и устройство, в которых учитывались бы по меньшей мере некоторые из проблем, описанных выше, а также другие возможные проблемы. Например, было бы желательным иметь способ и устройство, которые решают техническую проблему, связанную с определением аэродинамических углов с пониженным уровнем шума, выполняемым с необходимыми быстротой и точностью.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[005] Один вариант реализации раскрытия настоящего изобретения обеспечивает создание устройства, содержащего систему регистрации аэродинамических углов. Система регистрации аэродинамических углов вычисляет первую скорость изменения инерциального аэродинамического угла для летательного аппарата с использованием данных, принимаемых от инерциальной измерительной системы летательного аппарата. Кроме того, система регистрации аэродинамических углов вычисляет вторую скорость изменения измеряемого снаружи аэродинамического угла летательного аппарата. Кроме того, система регистрации аэродинамических углов вырабатывает отфильтрованный аэродинамический угол во время полета летательного аппарата с использованием первой скорости изменения инерциального аэродинамического угла и второй скорости изменения измеряемого снаружи аэродинамического угла. Кроме того, система регистрации аэродинамических углов изменяет вклад первой скорости изменения инерциального аэродинамического угла, используемого при выработке отфильтрованного аэродинамического угла, на основе разности между первой скоростью изменения инерциального аэродинамического угла и второй скоростью изменения измеряемого снаружи аэродинамического угла, обеспечивая возможность управления полетом летательного аппарата с использованием отфильтрованного аэродинамического угла.
[006] Другой вариант реализации раскрытия настоящего изобретения обеспечивает создание системы регистрации аэродинамических углов. Система регистрации аэродинамических углов содержит определитель первой скорости изменения, определитель второй скорости изменения, определитель ослабления, регулятор и фильтр. Определитель первой скорости изменения вычисляет первую скорость изменения инерциального аэродинамического угла летательного аппарата с использованием данных, принимаемых от инерциальной измерительной системы летательного аппарата, и отфильтрованного аэродинамического угла. Определитель второй скорости изменения вычисляет вторую скорость изменения измеряемого снаружи аэродинамического угла летательного аппарата. Определитель ослабления определяет значение ослабления на основе разности между первой скоростью изменения инерциального аэродинамического угла и второй скоростью изменения измеряемого снаружи аэродинамического угла, обеспечивая возможность управления полетом летательного аппарата с использованием отфильтрованного аэродинамического угла. Регулятор регулирует вклад первой скорости изменения инерциального аэродинамического угла с получением отрегулированного вклада. Фильтр вырабатывает отфильтрованный аэродинамический угол во время полета летательного аппарата с использованием отрегулированного вклада, полученного регулировкой регулятором, и измеряемого снаружи аэродинамического угла, обеспечивая возможность управления полетом летательного аппарата с использованием отфильтрованного аэродинамического угла.
[007] Еще один вариант реализации раскрытия настоящего изобретения обеспечивает создание способа обработки аэродинамических углов летательного аппарата. Вычисляют первую скорость изменения инерциального аэродинамического угла летательного аппарата с использованием данных, принимаемых от инерциальной измерительной системы летательного аппарата, и отфильтрованного аэродинамического угла. Далее вычисляют вторую скорость изменения измеряемого снаружи аэродинамического угла летательного аппарата. Отфильтрованный аэродинамический угол вырабатывают во время полета летательного аппарата с использованием первой скорости изменения инерциального аэродинамического угла и второй скорости изменения измеряемого снаружи аэродинамического угла. Вклад первой скорости изменения инерциального аэродинамического угла, используемого в выработанном отфильтрованном аэродинамическом угле, изменяют на основе разности между первой скоростью изменения инерциального аэродинамического угла и второй скоростью изменения измеряемого снаружи аэродинамического угла, обеспечивая возможность управления полетом летательного аппарата с использованием отфильтрованного аэродинамического угла.
[008] Указанные признаки и функции могут быть реализованы независимо в различных вариантах осуществления настоящего изобретения или могут быть скомбинированы с получением других вариантов осуществления изобретения, дополнительные подробности которых могут быть очевидными при обращении к последующему описанию и чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[009] Признаки иллюстративных вариантов реализации изобретения, обеспечивающие новизну по сравнению с уровнем техники, изложены в прилагаемой формуле изобретения. При этом иллюстративные варианты реализации изобретения, а также предпочтительный режим их применения, дополнительные цели и признаки будут лучше поняты из следующего подробного описания иллюстративного варианта реализации раскрытия настоящего изобретения при рассмотрении вместе с сопровождающими чертежами, на которых:
[0010] на ФИГ. 1 показана иллюстрация летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения;
[0011] на ФИГ. 2 показана иллюстрация блок-схемы среды регистрации аэродинамических углов в соответствии с иллюстративным вариантом реализации изобретения;
[0012] на ФИГ. 3 показана иллюстрация блок-схемы системы регистрации аэродинамических углов в соответствии с иллюстративным вариантом реализации изобретения;
[0013] на ФИГ. 4 показана иллюстрация системы фильтрации углов атаки в соответствии с иллюстративным вариантом реализации изобретения;
[0014] на ФИГ. 5 показана иллюстрация системы фильтрации углов бокового скольжения в соответствии с иллюстративным вариантом реализации изобретения;
[0015] на ФИГ. 6 показана иллюстрация определителя скорости изменения инерциального угла атаки в соответствии с иллюстративным вариантом реализации изобретения;
[0016] на ФИГ. 7 показана иллюстрация определителя скорости изменения инерциального угла бокового скольжения в соответствии с иллюстративным вариантом реализации изобретения;
[0017] на ФИГ. 8 показана иллюстрация углов атаки в соответствии с иллюстративным вариантом реализации изобретения;
[0018] на ФИГ. 9 показана иллюстрация углов бокового скольжения в соответствии с иллюстративным вариантом реализации изобретения;
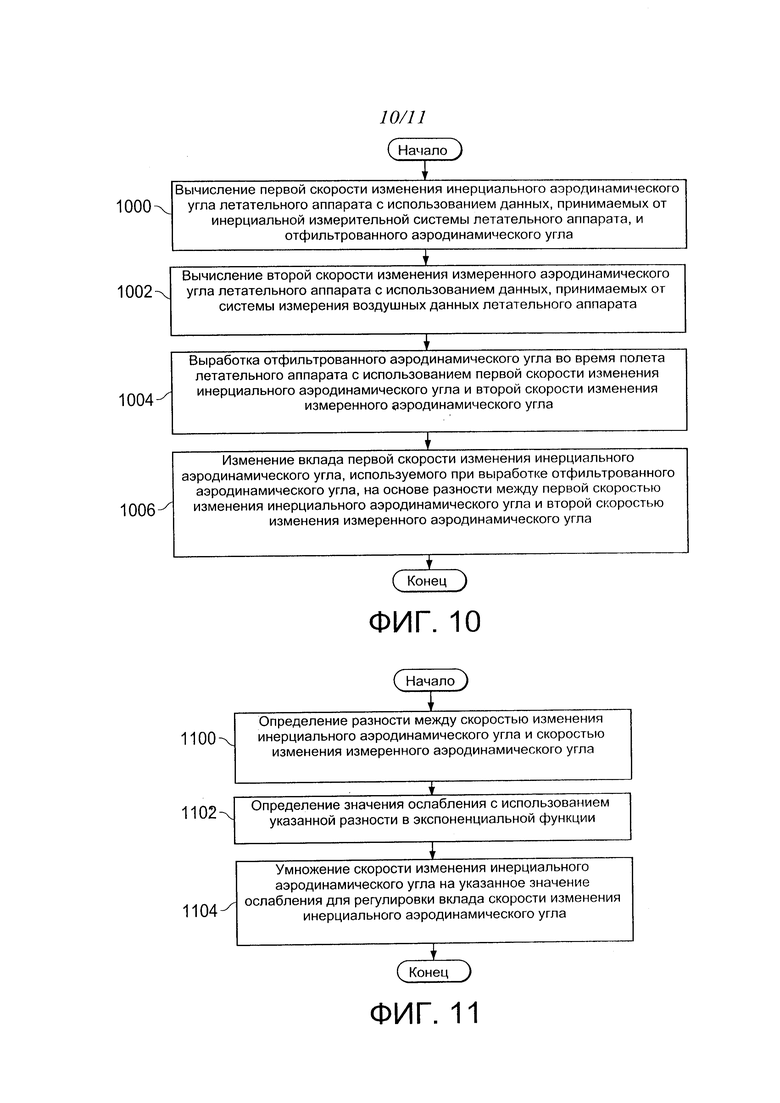
[0019] на ФИГ. 10 показана иллюстрация структурной схемы процесса обработки аэродинамических углов летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения;
[0020] на ФИГ. 11 показана иллюстрация структурной схемы процесса регулировки вклада скорости изменения инерциального аэродинамического угла в соответствии с иллюстративным вариантом реализации изобретения;
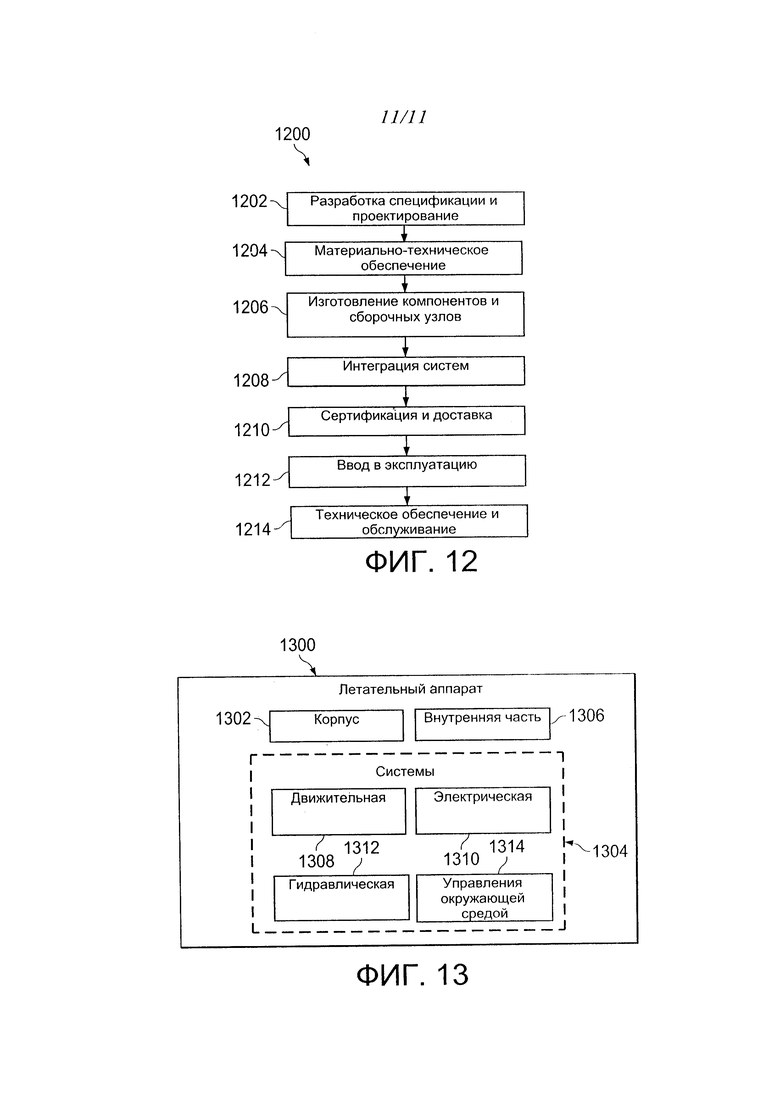
[0021] на ФИГ. 12 показана иллюстрация блок-схемы способа изготовления и обслуживания летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения; и
[0022] на ФИГ. 13 показана иллюстрация блок-схемы летательного аппарата, в котором может быть реализован иллюстративный вариант реализации изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0023] В иллюстративных вариантах реализации изобретения рассматриваются и учитываются одно или более различных соображений. Например, в иллюстративных вариантах реализации изобретения признается и учитывается, что известные фильтры аэродинамических углов, таких как угол атаки и угол бокового скольжения, не отфильтровывают шум от кратковременной турбулентности с одновременным реагированием на устойчивые порывы ветра с необходимыми быстротой и точностью для управления летательным аппаратом.
[0024] В иллюстративных вариантах реализации изобретения рассматривается и учитывается, что известные фильтры первого порядка с запаздыванием, используемые в настоящее время в летательном аппарате для определения углов атаки и углов бокового скольжения могут отфильтровывать шум от кратковременной турбулентности, но с задержкой реагируют на указание изменений этих углов, когда летательный аппарат сталкивается с устойчивыми порывами ветра. Запаздывание или задержка не могут обеспечить информацию об этих углах с быстротой и точностью, требующимися, чтобы автопилот и система управления полетом внесли необходимые изменения в полете летательного аппарата, или для включения системы сигнализации о приближении к сваливанию с необходимыми быстротой и точностью.
[0025] В иллюстративных вариантах реализации изобретения также рассматривается и учитывается, что используемые в настоящее время комплементарные фильтры могут обеспечить необходимое реагирование на кратковременную турбулентность посредством использования угла атаки, получаемого внутренним измерением. Однако фильтры этих типов не могут фиксировать быстрые изменения, например, от устойчивых порывов ветра.
[0026] Таким образом, иллюстративные варианты реализации изобретения обеспечивают создание способа и устройства для передачи данных об аэродинамических углах с уменьшением шума от кратковременной турбулентности и достаточно быстрым и точным реагированием на устойчивые порывы ветра. В одном иллюстративном примере первую скорость изменения инерциального аэродинамического угла летательного аппарата вычисляют с использованием данных, принимаемых от инерциальной измерительной системы летательного аппарата. Вычисляют вторую скорость изменения измеряемого снаружи аэродинамического угла летательного аппарата. Отфильтрованный аэродинамический угол вырабатывают во время полета летательного аппарата с использованием первой скорости изменения инерциального аэродинамического угла и второй скорости изменения измеряемого снаружи аэродинамического угла. Вклад первой скорости изменения инерциального аэродинамического угла, используемого при выработке отфильтрованного аэродинамического угла, изменяют на основе разности между первой скоростью изменения инерциального аэродинамического угла и второй скоростью изменения измеряемого снаружи аэродинамического угла, обеспечивая возможность управления полетом летательного аппарата с использованием отфильтрованного аэродинамического угла.
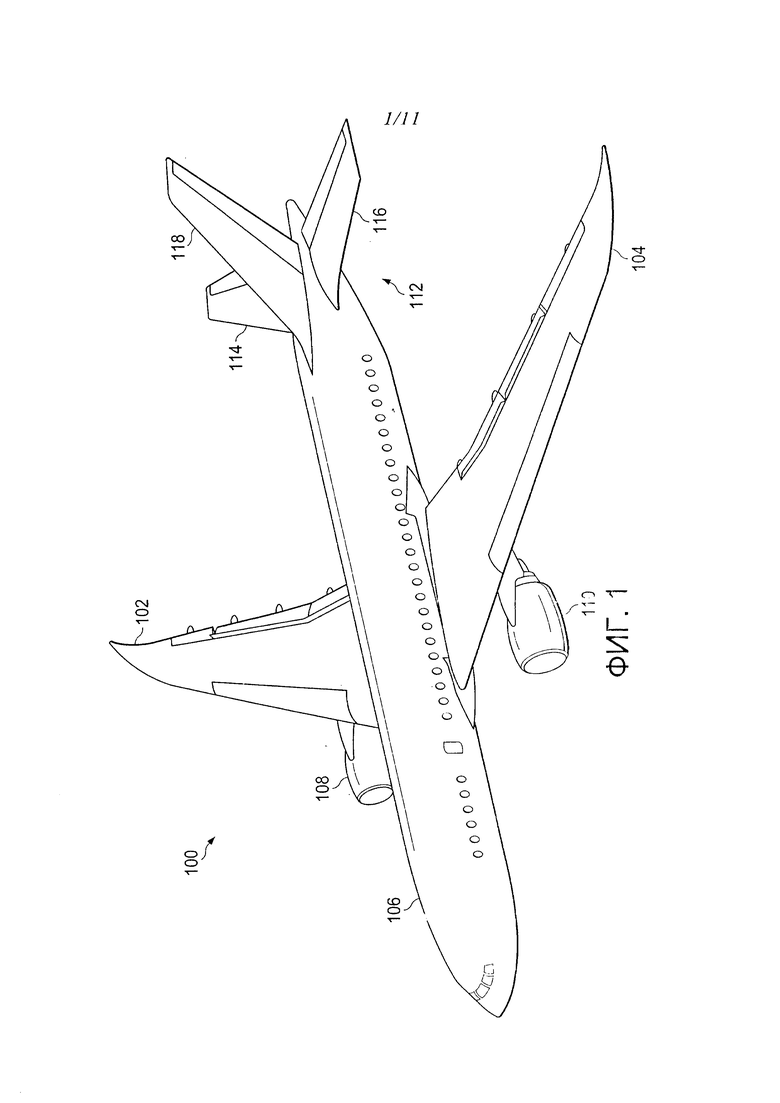
[0027] Далее со ссылкой на фигуры чертежей, и в частности, на ФИГ. 1 показан летательный аппарат в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере летательный аппарат 100 имеет крыло 102 и крыло 104, прикрепленные к корпусу 106. Летательный аппарат 100 включает в себя двигатель 108, прикрепленный к крылу 102, и двигатель 110, прикрепленный к крылу 104.
[0028] Корпус 106 имеет хвостовую часть 112. Горизонтальный стабилизатор 114, горизонтальный стабилизатор 116 и вертикальный стабилизатор 118 прикреплены к хвостовой части 112 корпуса 106.
[0029] Летательный аппарат 100 является примером летательного аппарата, в котором может быть реализована система регистрации аэродинамических углов в соответствии с иллюстративным вариантом реализации изобретения. Система регистрации аэродинамических углов предоставляет информацию об аэродинамических углах для использования различными системами обработки данных в летательном аппарате 100 таким образом, что это уменьшает шум и запаздывание при определении аэродинамических углов. Шум и запаздывание вызваны изменением ветра относительно летательного аппарата.
[0030] Шум может быть вызван кратковременной турбулентностью. Запаздывание при определении аэродинамического угла может быть вызвано устойчивым порывом ветра. В этом иллюстративном примере кратковременная турбулентность может возникать, когда летательный аппарат испытывает воздействие порыва ветра, имеющего величину примерно среднего ветра. Этот порыв ветра является непрерывным, но изменяется случайным образом во времени и пространстве. Средний ветер вычисляют посредством суммирования скорости ветра в точках выборки в течение периода времени, разделенного на количество точек выборки.
[0031] Как показано на чертежах, устойчивый порыв ветра представляет собой средний ветер, скорость которого изменяется с течением времени. Порыв ветра может внезапно или постепенно изменяться со временем и в пространстве вследствие сдвига ветра и градиентов температуры.
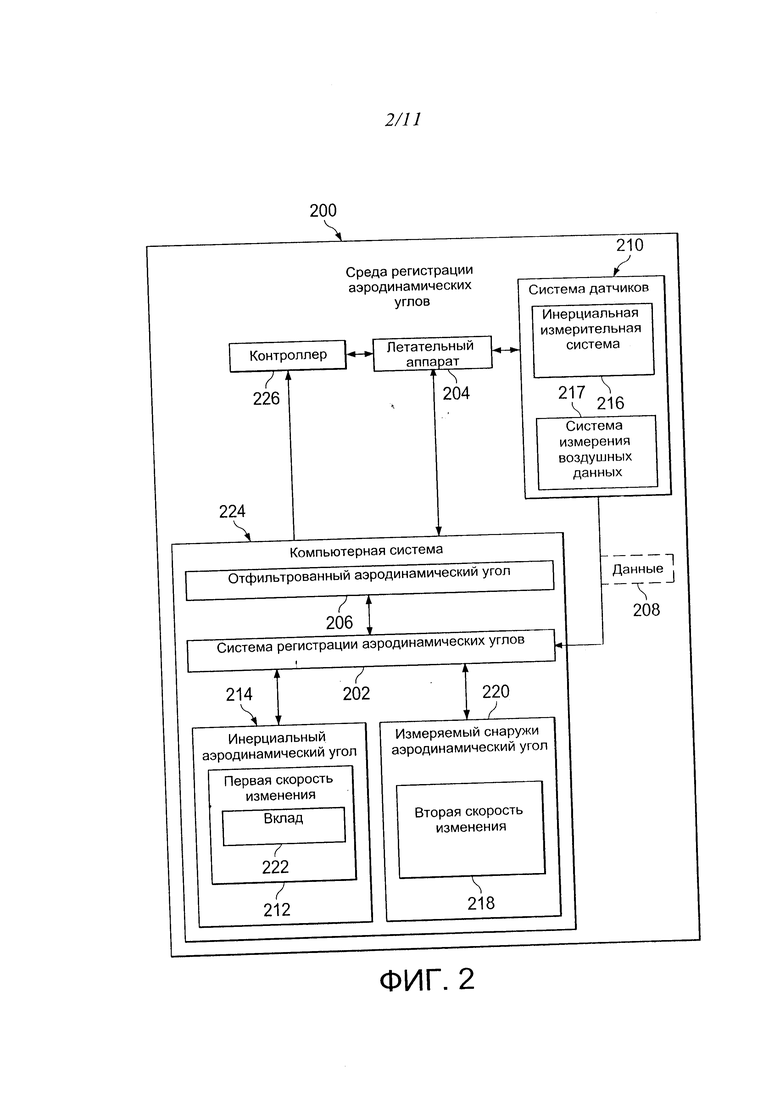
[0032] На ФИГ. 2 проиллюстрирована блок-схема среды регистрации аэродинамических углов в соответствии с иллюстративным вариантом реализации изобретения. В этом примере среда 200 регистрации аэродинамических углов включает в себя систему 202 регистрации аэродинамических углов, которая связана с летательным аппаратом 204.
[0033] Летательный аппарат 100 по ФИГ. 1 является примером физической реализации летательного аппарата 204. Летательный аппарат 204 выбран из одного такого устройства, как самолет, коммерческий самолет, летательный аппарат вертикального взлета и посадки, беспилотное воздушное транспортное средство, винтокрылый летательный аппарат или летательный аппарат какого-либо иного подходящего типа.
[0034] В этом иллюстративном примере система 202 регистрации аэродинамических углов определяет отфильтрованный аэродинамический угол 206 летательного аппарата 204 во время полета летательного аппарата 204. Аэродинамический угол представляет собой угол воздушного потока относительно летательного аппарата 204. Например, аэродинамический угол может быть выбран из одного такого угла, как угол атаки, угол бокового скольжения, или какого-либо другого угла, который представляет собой угол воздушного потока относительно летательного аппарата 204.
[0035] Отфильтрованный аэродинамический угол 206 является выходным сигналом, вырабатываемым системой 202 регистрации аэродинамических углов с использованием данных 208 от системы 210 датчиков в летательном аппарате 204. Как показано на чертежах, система 210 датчиков 210 может выполнять измерения с внешней стороны относительно летательного аппарата 204, внутренние измерения, касающиеся летательного аппарата 204 и среды, окружающей летательный аппарат 204.
[0036] Как показано на чертежах, система 202 регистрации аэродинамических углов вычисляет первую скорость изменения 212 инерциального аэродинамического угла 214 летательного аппарата 204 с использованием данных 208, принимаемых от инерциальной измерительной системы 216 в системе 210 датчиков летательного аппарата 204. Система 202 регистрации аэродинамических углов вычисляет вторую скорость изменения 218 измеряемого снаружи аэродинамического угла 220 летательного аппарата 204 с использованием данных 208, принимаемых от системы 217 измерения воздушных данных в системе 210 датчиков.
[0037] Система 202 регистрации аэродинамических углов вырабатывает отфильтрованный аэродинамический угол 206 во время полета летательного аппарата 204 с использованием первой скорости изменения 212 инерциального аэродинамического угла 214 и второй скорости изменения 218 измеряемого снаружи аэродинамического угла 220. Вклад 222 первой скорости изменения 212 инерциального аэродинамического угла 214, используемый при выработке отфильтрованного аэродинамического угла 206, изменяют на основе разности между первой скоростью изменения 212 инерциального аэродинамического угла 214 и второй скоростью изменения 218 измеряемого снаружи аэродинамического угла 220. Эти операции, выполняемые системой 202 регистрации аэродинамических углов, обеспечивают возможность управления полетом летательного аппарата 204 с использованием отфильтрованного аэродинамического угла 206.
[0038] Система 202 регистрации аэродинамических углов вычисляет первую скорость изменения 212 инерциального аэродинамического угла 214 летательного аппарата 204 с использованием данных 208, принимаемых от инерциальной измерительной системы 216 летательного аппарата 204, и изменяет вклад первой скорости изменения 212 инерциального аэродинамического угла 214 в отфильтрованный аэродинамический угол 206.
[0039] Отфильтрованный аэродинамический угол 206 используют в качестве сигнала обратной связи для динамической регулировки первой скорости изменения 212 инерциального аэродинамического угла 214. Вклад 222 первой скорости изменения 212 инерциального аэродинамического угла 214 может быть изменен для уменьшения воздействия по меньшей мере одного такого фактора, как устойчивый порыв ветра, кратковременная турбулентность, или какого-либо иного нежелательного воздействия.
[0040] Система 202 регистрации аэродинамических углов может быть реализована в программном обеспечении, аппаратных средствах, прошивке или их комбинации. Когда используется программное обеспечение, операции, выполняемые системой 202 регистрации аэродинамических углов, могут быть реализованы в программном коде, выполненном с возможностью запуска на аппаратных средствах, таких как процессорный блок. Когда используется прошивка, операции, выполняемые системой 202 регистрации аэродинамических углов, могут быть реализованы в программном коде и данных и сохранены в постоянной памяти для запуска в процессорном блоке. Когда используются аппаратные средства, аппаратные средства могут включать в себя схемы, которые работают для выполнения указанных операций в системе 202 регистрации аэродинамических углов.
[0041] В приведенных иллюстративных примерах аппаратные средства могут быть выполнены в виде, выбранном по меньшей мере из одного следующего средства: системы замыкания, интегральной схемы, специализированной интегральной схемы (ASIC), программируемого логического устройства или аппаратных средств какого-либо другого соответствующего типа, выполненных с возможностью выполнения множества операций. С программируемым логическим устройством, рассматриваемое устройство может быть выполнено с возможностью выполнения указанного множества операций. Конфигурация рассматриваемого устройства может быть изменена позднее, или оно может иметь постоянную конфигурацию для выполнения указанного множества операций. Программируемые логические устройства включают в себя, например, программируемый логический блок, программируемую матричную логическую схему, логическую матрицу с эксплуатационным программированием, программируемую пользователем вентильную матрицу и другие соответствующие аппаратные устройства. Кроме того, процессы могут быть реализованы в органических компонентах, встроенных в неорганические компоненты, и могут состоять целиком из органических компонентов, за исключением человека. Например, процессы могут быть реализованы в виде схем в органических полупроводниках.
[0042] В этом иллюстративном примере система 202 регистрации аэродинамических углов может быть расположена в компьютерной системе 224 в летательном аппарате 204. Компьютерная система 224 является физической аппаратной системой и включает в себя одну или более систем обработки данных. При наличии более чем одной системы обработки данных эти системы обработки данных находятся в связи друг с другом с использованием средства связи. Средство связи может представлять собой сеть. Системы обработки данных могут быть выбраны по меньшей мере из одного такого устройства, как компьютер, серверный компьютер, планшет, или какой-либо иной подходящей системы обработки данных.
[0043] Как показано на чертежах, контроллер 226 управляет полетом летательного аппарата 204 с использованием отфильтрованного аэродинамического угла 206. В одном иллюстративном примере представлены одно или более технических решений, которыми решается техническая проблема, связанная с определением аэродинамических углов с меньшим уровнем шума и с необходимыми быстротой и точностью. В результате, одно или более технических решений обеспечивают возможность получения технического результата, в котором шум уменьшен, а определение аэродинамического угла производят быстрее и точнее по сравнению с используемыми в настоящее время системами фильтрации. В одном или более технических решениях используется инерциальный аэродинамический угол и измеряемый снаружи аэродинамический угол, при этом регулируют вклады инерциального аэродинамического угла.
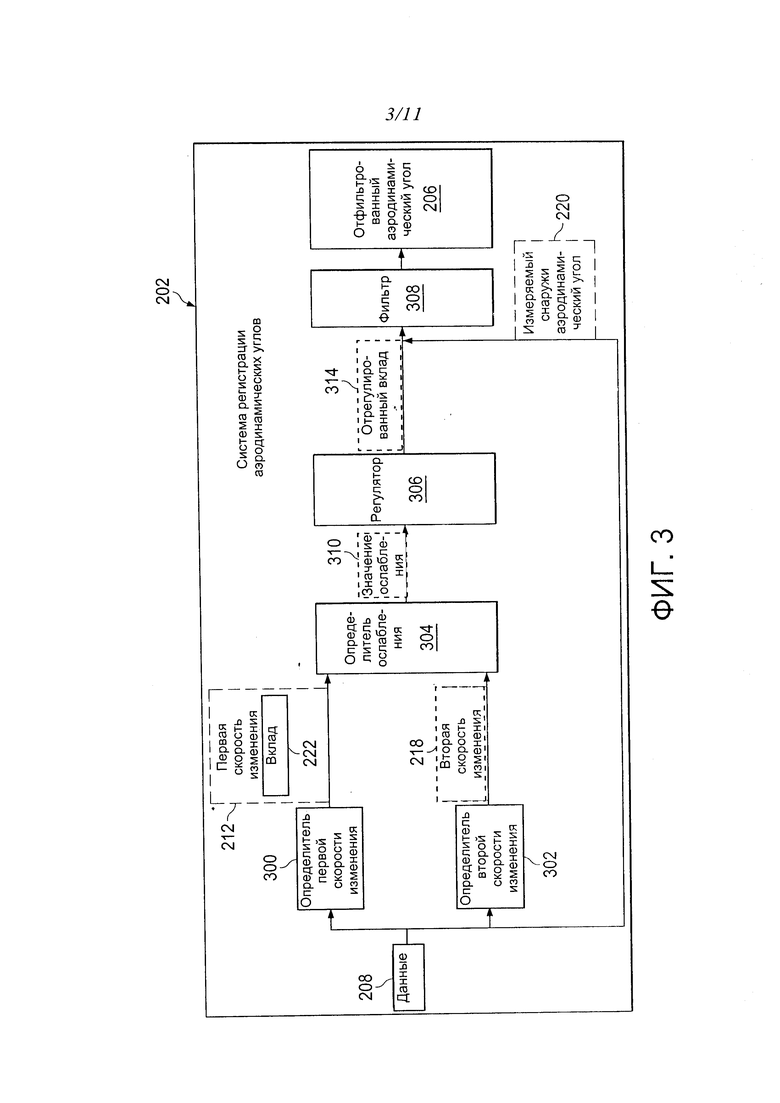
[0044] Далее на ФИГ. 3 схематически показана иллюстрация блок-схемы системы регистрации аэродинамических углов в соответствии с иллюстративным вариантом реализации изобретения. В приведенных иллюстративных примерах одинаковые ссылочные номера могут быть использованы более чем на одной фигуре чертежей. Такое повторное использование ссылочных номеров на различных чертежах представляет один и тот же элемент на разных фигурах чертежей.
[0045] В приведенном иллюстративном примере система 202 регистрации аэродинамических углов включает в себя ряд различных функциональных компонентов. Функциональные компоненты, показанные на этом чертеже, являются примером возможной реализации функциональных компонентов системы 202 регистрации аэродинамических углов. Как показано на чертежах, система 202 регистрации аэродинамических углов включает в себя определитель 300 первой скорости изменения, определитель 302 второй скорости изменения, определитель 304 ослабления, регулятор 306 и фильтр 308.
[0046] Определитель 300 первой скорости изменения вычисляет первую скорость изменения 212 инерциального аэродинамического угла 214 летательного аппарата 204 по ФИГ. 2 с использованием данных 208, принимаемых от инерциальной измерительной системы 216 по ФИГ. 2 летательного аппарата 204 и отфильтрованного аэродинамического угла 206. Определитель 302 второй скорости изменения вычисляет вторую скорость изменения 218 измеряемого снаружи аэродинамического угла 220 летательного аппарата 204.
[0047] В этом иллюстративном примере определитель 304 ослабления определяет значение 310 ослабления на основе разности между первой скоростью изменения 212 инерциального аэродинамического угла 214 по ФИГ. 2 и второй скоростью изменения 218 измеряемого снаружи аэродинамического угла 220, обеспечивая возможность управления полетом летательного аппарата 204 с использованием отфильтрованного аэродинамического угла 206.
[0048] Регулятор 306 регулирует вклад 222 первой скорости изменения 212 инерциального аэродинамического угла 214 с получением отрегулированного вклада 314. Фильтр 308 вырабатывает отфильтрованный аэродинамический угол 206 во время полета летательного аппарата 204 с использованием отрегулированного вклада 314, полученного регулировкой регулятором 306, и измеряемого снаружи аэродинамического угла 220, обеспечивая возможность управления полетом летательного аппарата 204 с использованием отфильтрованного аэродинамического угла 206. В этом примере фильтр 308 содержит фильтр с запаздыванием, в частности, фильтр первого порядка с запаздыванием.
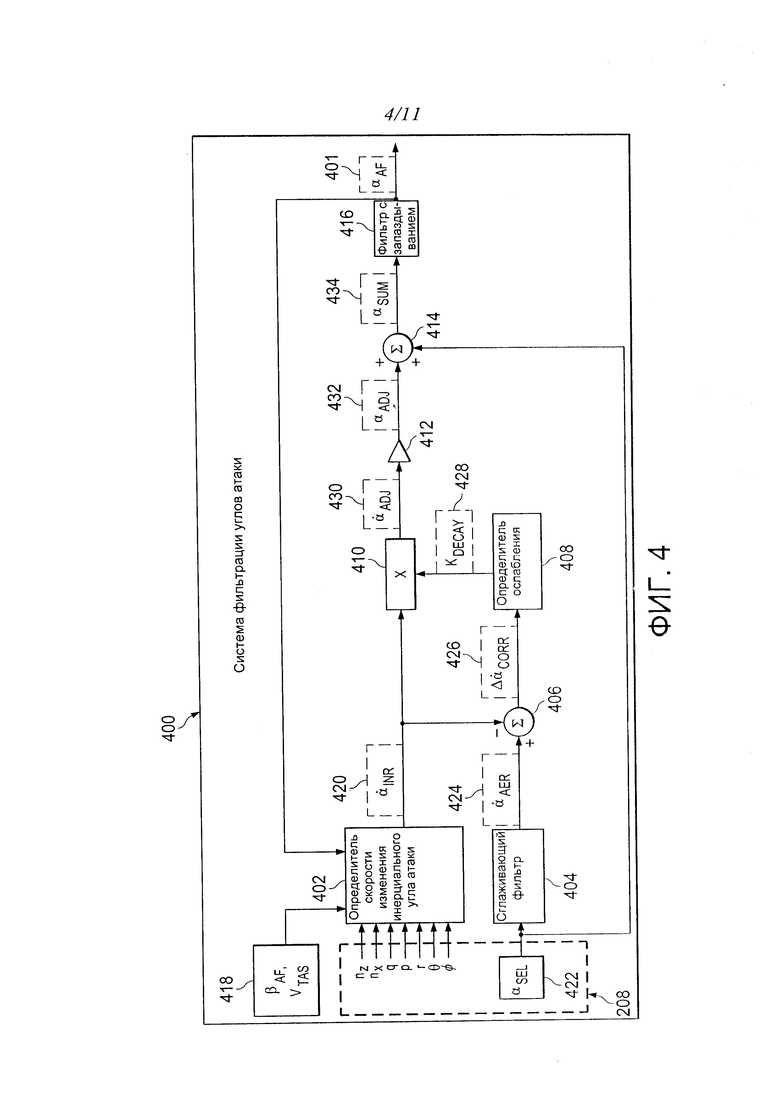
[0049] На ФИГ. 4 показана система фильтрации углов атаки в соответствии с иллюстративным вариантом реализации изобретения. Система 400 фильтрации углов атаки представляет собой систему фильтрации, размещенную в системе 202 регистрации аэродинамических углов по ФИГ. 2.
[0050] Система 400 фильтрации углов атаки включает в себя ряд различных компонентов, которые используются для вывода отфильтрованного угла атаки (αAF) 401. Как показано на чертежах, система 400 фильтрации углов атаки в системе 202 регистрации аэродинамических углов включает в себя определитель 402 скорости изменения инерциального угла атаки, сглаживающий фильтр 404, блок 406 вычитания, определитель 408 ослабления, умножитель 410, преобразователь 412, суммирующий блок 414 и фильтр 416 с запаздыванием.
[0051] Определитель 402 скорости изменения инерциального угла атаки принимает данные 208 от инерциальной измерительной системы 216 в системе 210 датчиков по ФИГ. 2. В этом примере данные 208 включают в себя nz, nx, q, р, r, θ и Ф. В этом показанном примере
nz и nх - коэффициенты нормальных и продольных нагрузок, соответственно, в связанной системе координат;
q, р и r - угловые скорости тангажа, крена и рыскания в градусах в секунду, соответственно, в связанной системе координат;
θ - угол тангажа в градусах и
Ф - угол крена в градусах.
[0052] Кроме того, определитель 402 скорости изменения инерциального угла атаки принимает вычисленные данные 418 летательного аппарата 204 по ФИГ. 2 в виде βAF и VTAS. В этом иллюстративном примере βAF представляет собой отфильтрованный угол бокового скольжения, и αAF представляет собой отфильтрованный угол атаки (αAF) 401, выдаваемый посредством этой реализации системы 202 регистрации аэродинамических углов. Как показано на чертежах, VTAS является истинной воздушной скоростью. Эти элементы данных вычисляют исходя из данных 208 или других данных, а не вырабатываются датчиками в системе 210 датчиков по ФИГ. 2.
[0053] С помощью этих входных значений определитель 402 скорости изменения инерциального угла атаки вычисляет скорость изменения  420 инерциального угла атаки, которая представляет собой скорость изменения инерциального угла атаки. Значение, выдаваемое определителем 402 скорости изменения инерциального угла атаки, является примером первой скорости изменения 212 инерциального аэродинамического угла 214 по ФИГ. 2. Как показано на чертежах, сглаживающий фильтр 404 является таким фильтром, который выполняет сглаживание и регистрацию скорости изменения измеряемого снаружи угла атаки. В этом примере сглаживающий фильтр 404 реализует следующее выражение:
420 инерциального угла атаки, которая представляет собой скорость изменения инерциального угла атаки. Значение, выдаваемое определителем 402 скорости изменения инерциального угла атаки, является примером первой скорости изменения 212 инерциального аэродинамического угла 214 по ФИГ. 2. Как показано на чертежах, сглаживающий фильтр 404 является таким фильтром, который выполняет сглаживание и регистрацию скорости изменения измеряемого снаружи угла атаки. В этом примере сглаживающий фильтр 404 реализует следующее выражение:
 , где
, где
s - параметр частоты в виде комплексного числа для преобразования Лапласа в фильтре, входным значением которого является измеряемый снаружи угол атаки (αSEL) 422, и
TWa - постоянная времени.
TWa выбирают так, чтобы обеспечить эффективное удаление высокочастотного шума, который не отражает движение самолета относительно неподвижных или движущихся воздушных масс.
[0054] В этом примере сглаживающий фильтр 404 принимает измеряемый снаружи угол атаки (αSEL) 422 в данных 208. Измеряемый снаружи угол атаки (αSEL) 422 представляет собой угол атаки, измеряемый от системы 217 измерения воздушных данных системы 210 датчиков снаружи летательного аппарата 204 по ФИГ. 2. Например, измеряемый снаружи угол атаки (αSEL) 422 может быть измерен с использованием датчика, такого как флюгерный датчик угла атаки, флюгарка датчика угла атаки или лидарной системы, в системе 217 измерения воздушных данных системы 210 датчиков по ФИГ. 2. Датчики этих типов выполняют измерения снаружи летательного аппарата на основе воздушного потока летательного аппарата для определения угла атаки.
[0055] Как показано на чертежах, сглаживающий фильтр 404 выдает скорость изменения  424 измеряемого снаружи угла атаки. В этом примере скорость изменения 424 измеряемого снаружи угла атаки является скоростью изменения измеряемого снаружи угла атаки (αSEL) 422.
424 измеряемого снаружи угла атаки. В этом примере скорость изменения 424 измеряемого снаружи угла атаки является скоростью изменения измеряемого снаружи угла атаки (αSEL) 422.
[0056] Вводы блока 406 вычитания соединены с выводами из определителя 402 скорости изменения инерциального угла атаки и сглаживающего фильтра 404. Как показано на чертежах, блок 406 вычитания принимает скорость изменения 420 инерциального угла атаки и скорость изменения  424 измеряемого снаружи угла атаки и вычитает скорость изменения
424 измеряемого снаружи угла атаки и вычитает скорость изменения  420 инерциального угла атаки из скорости изменения 424 измеряемого снаружи угла атаки. Блок 406 вычитания выдает разность
420 инерциального угла атаки из скорости изменения 424 измеряемого снаружи угла атаки. Блок 406 вычитания выдает разность  426.
426.
[0057] Вход определителя 408 ослабления соединен с выходом блока 406 вычитания. Определитель 408 ослабления выдает значение ослабления (KDecay) 428 с использованием разности (ΔαCORR) 426. В этом иллюстративном примере определитель 408 ослабления реализован с использованием следующего уравнения:

где FDecay является постоянной.
FDecay выбирают для учета порывов ветра, которые могут длиться достаточно долго, чтобы привести к тому, что значения скорости изменения  420 и инерциального угла атаки скорости изменения
420 и инерциального угла атаки скорости изменения  424 измеряемого снаружи угла атаки будут по существу противоположны друг другу. Порывы ветра таких типов являются устойчивыми порывами ветра. В этом иллюстративном примере значение ослабления (KDecay) 428 используют для регулировки вклада скорости изменения
424 измеряемого снаружи угла атаки будут по существу противоположны друг другу. Порывы ветра таких типов являются устойчивыми порывами ветра. В этом иллюстративном примере значение ослабления (KDecay) 428 используют для регулировки вклада скорости изменения  инерциального угла атаки 420 в систему 400 фильтрации углов атаки.
инерциального угла атаки 420 в систему 400 фильтрации углов атаки.
[0058] Регулировку вклада выполняют в умножителе 410. Вводы умножителя 410 соединены с выводами определителя 402 скорости изменения инерциального угла атаки и определителя 408 ослабления. Умножитель 410 умножает значение скорости изменения 420 инерциального угла атаки и значение ослабления (KDecay) 428. Умножитель 410 выдает отрегулированный вклад скорости изменения (αADJ) 430 инерциального угла атаки.
[0059] Как показано на чертежах, ввод преобразователя 412 соединен с умножителем 410. Преобразователь 412 преобразует указанную скорость в отрегулированный угол с использованием постоянной (Tcα) времени и выдает отрегулированный инерциальный угол атаки (αADJ) 432. Постоянную (Тсα) времени выбирают так, чтобы обеспечить эффективное удаление доли кратковременной турбулентности, которая может присутствовать в измеряемом снаружи угле атаки (αSEL) 422 фильтром 416 с запаздыванием. Функция постоянной (Тсα) времени в преобразователе 412 заключается в обеспечении компенсации любой задержки, которую фильтр 416 с запаздыванием может привнести в измеряемый снаружи угол атаки (αSEL) 422.
[0060] В этом иллюстративном примере суммирующий блок 414 имеет вход, соединенный с выходом преобразователя 412. Этот другой ввод суммирующего блока 414 принимает измеряемый снаружи угол атаки (αSEL) 422. Суммирующий блок 414 выдает суммарный угол атаки (αSUM) 434.
[0061] Фильтр 416 с запаздыванием также называется фильтром нижних частот, и его вход соединен с выходом суммирующего блока 414 для приема суммарного угла атаки (αSUM) 434. Фильтр 416 с запаздыванием реализует следующее выражение:
 , где
, где
s - параметр частоты в виде комплексного числа для преобразования Лапласа в фильтре, входным значением которого является суммарный угол атаки (αSUM) 434, а
Tcα - постоянная времени, которая также используется в преобразователе 412.
[0062] Как показано на чертежах, фильтр 416 с запаздыванием выдает отфильтрованный угол атаки (αAF) 401. В этом иллюстративном примере отфильтрованный угол атаки (αAF) 401 используют в контуре обратной связи в качестве входного сигнала, подаваемого в определитель 402 скорости изменения инерциального угла атаки.
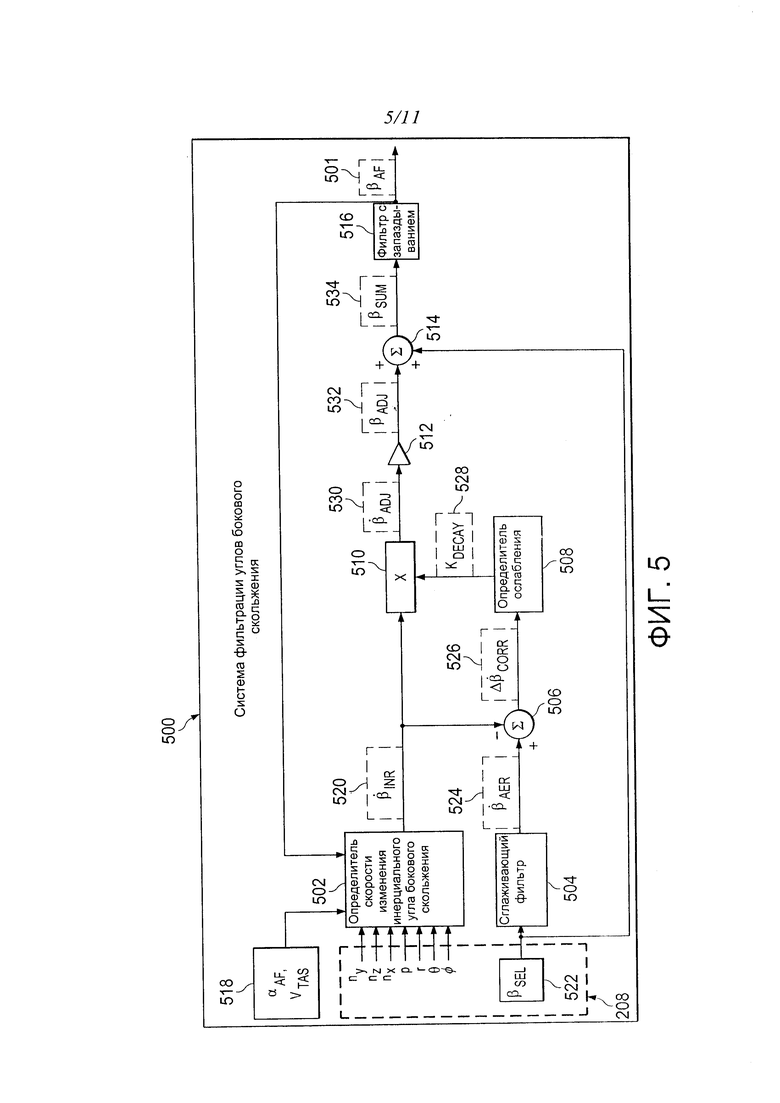
[0063] На ФИГ. 5 показана схема системы фильтрации углов бокового скольжения в соответствии с иллюстративным вариантом реализации изобретения. Система 500 фильтрации углов бокового скольжения представляет собой систему фильтрации в системе 202 регистрации аэродинамических углов по ФИГ. 2.
[0064] Система 500 фильтрации углов бокового скольжения включает в себя ряд различных компонентов, которые используются для вывода отфильтрованного угла бокового скольжения (βAF) 501. Как показано на чертежах, система 500 фильтрации углов бокового скольжения в системе 202 регистрации аэродинамических углов включает в себя определитель 502 скорости изменения инерциального угла бокового скольжения, сглаживающий фильтр 504, блок 506 вычитания, определитель 508 ослабления, умножитель 510, преобразователь 512, суммирующий блок 514 и фильтр 516 с запаздыванием.
[0065] Определитель 502 скорости изменения инерциального угла бокового скольжения принимает данные 208 от инерциальной измерительной системы 216 в системе 210 датчиков по ФИГ. 2. В этом примере данные 208 включают в себя nу, nz, nх, р, r, θ и Ф. В этом примере
ny, nz и nх - коэффициенты боковой, нормальной и продольной нагрузок, соответственно, в связанной системе координат;
р и r - угловые скорости крена и рыскания в градусах в секунду, соответственно, в связанной системе координат;
θ - угол тангажа в градусах и
Ф - угол крена в градусах.
[0066] Кроме того, определитель 502 скорости изменения инерциального угла бокового скольжения принимает вычисленные данные 518 летательного аппарата 204 по ФИГ. 2 в виде αAF и VTAS. В этом иллюстративном примере αΑF представляет собой отфильтрованный угол атаки 401 в системе 202 регистрации аэродинамических углов, как показано на ФИГ. 4. VTAS является истинной воздушной скоростью.
[0067] В этом примере отфильтрованный угол бокового скольжения (βAF) 501 представляет собой сигнал обратной связи от выхода системы 202 регистрации аэродинамических углов, как показано на чертежах. Кроме того, отфильтрованный угол бокового скольжения (βAF) 501 является одним из значений в вычисленных данных 418 по ФИГ. 4, которое представляет собой ввод в определитель 402 скорости изменения инерциального угла атаки по ФИГ. 4.
[0068] С помощью этих входных значений определитель 502 скорости изменения инерциального угла бокового скольжения вычисляет скорость изменения  520 инерциального угла бокового скольжения, которая представляет собой скорость изменения инерциального угла бокового скольжения. Это значение, выдаваемое определителем 502 скорости изменения инерциального угла бокового скольжения, является примером первой скорости изменения 212 инерциального аэродинамического угла 214 по ФИГ. 2.
520 инерциального угла бокового скольжения, которая представляет собой скорость изменения инерциального угла бокового скольжения. Это значение, выдаваемое определителем 502 скорости изменения инерциального угла бокового скольжения, является примером первой скорости изменения 212 инерциального аэродинамического угла 214 по ФИГ. 2.
[0069] Как показано на чертежах, сглаживающий фильтр 504 является таким фильтром, который выполняет сглаживание и регистрацию скорости изменения измеряемого снаружи угла бокового скольжения. В этом примере сглаживающий фильтр 504 реализует следующее выражение:
 , где
, где
s - параметр частоты в виде комплексного числа для преобразования Лапласа в фильтре, входным значением которого является измеряемый снаружи угол бокового скольжения, и
TWβ - постоянная времени.
TWβ выбирают так, чтобы обеспечить эффективное удаление высокочастотного шума, который не отражает движение самолета относительно неподвижных или движущихся воздушных масс.
[0070] В этом примере сглаживающий фильтр 504 принимает измеряемый снаружи угол бокового скольжения (βSEL) 522 в данных 208. Измеряемый снаружи угол бокового скольжения (βSEL) 522 представляет собой угол бокового скольжения, измеряемый от системы 217 измерения воздушных данных системы 210 датчиков снаружи летательного аппарата 204 по ФИГ. 2. Измеряемый снаружи угол бокового скольжения (βSEL) 522 может быть измерен с использованием датчика, такого как пара отверстий для измерения угла скольжения на основе перепада давления, флюгерный датчик угла скольжения или лидарной системы в системе 217 измерения воздушных данных системы 210 датчиков по ФИГ. 2. Датчики этих типов выполняют измерения снаружи летательного аппарата 204 на основе воздушного потока летательного аппарата для определения угла бокового скольжения.
[0071] Как показано на чертежах, сглаживающий фильтр 504 выдает скорость изменения  524 измеряемого снаружи угла бокового скольжения. В этом примере скорость изменения
524 измеряемого снаружи угла бокового скольжения. В этом примере скорость изменения  524 измеряемого снаружи угла бокового скольжения является скоростью изменения измеряемого снаружи угла бокового скольжения (βSEL) 522.
524 измеряемого снаружи угла бокового скольжения является скоростью изменения измеряемого снаружи угла бокового скольжения (βSEL) 522.
[0072] Вводы блока 506 вычитания соединены с выводами из определителя 502 скорости изменения инерциального угла бокового скольжения и сглаживающего фильтра 504. В частности, блок 506 вычитания принимает скорость изменения  520 инерциального угла бокового скольжения и скорость изменения
520 инерциального угла бокового скольжения и скорость изменения  524 измеряемого снаружи угла бокового скольжения и вычитает скорость изменения
524 измеряемого снаружи угла бокового скольжения и вычитает скорость изменения  520 инерциального угла бокового скольжения из скорости изменения
520 инерциального угла бокового скольжения из скорости изменения  524 измеряемого снаружи угла бокового скольжения. Блок 506 вычитания выдает разность
524 измеряемого снаружи угла бокового скольжения. Блок 506 вычитания выдает разность  526.
526.
[0073] Вход определителя 508 ослабления соединен с выходом блока 506 вычитания. Определитель 508 ослабления выдает значение ослабления (KDecay) 528. В этом примере определитель 508 ослабления реализует следующее уравнение:
 , где
, где
FDecay является постоянной.
FDecay выбирают для учета порывов ветра, которые могут длиться достаточно долго, чтобы привести к тому, что значения скорости изменения  520 инерциального угла бокового скольжения и скорости изменения
520 инерциального угла бокового скольжения и скорости изменения  524 измеряемого снаружи угла бокового скольжения будут по существу противоположны друг другу. Порывы ветра таких типов являются устойчивыми порывами ветра. В этом иллюстративном примере значение ослабления (KDecay) 528 используют для регулировки вклада скорости изменения
524 измеряемого снаружи угла бокового скольжения будут по существу противоположны друг другу. Порывы ветра таких типов являются устойчивыми порывами ветра. В этом иллюстративном примере значение ослабления (KDecay) 528 используют для регулировки вклада скорости изменения  520 инерциального угла бокового скольжения в систему 500 фильтрации углов бокового скольжения.
520 инерциального угла бокового скольжения в систему 500 фильтрации углов бокового скольжения.
[0074] Регулировку вклада выполняют в умножителе 510. Вводы умножителя 510 соединены с выводами определителя 502 скорости изменения инерциального угла бокового скольжения и определителя 508 ослабления.
Умножитель 510 выдает отрегулированный вклад скорости изменения  530 инерциального угла бокового скольжения.
530 инерциального угла бокового скольжения.
[0075] Как показано на чертежах, вход преобразователя 512 соединен с умножителем 510. Преобразователь 512 преобразует указанную скорость в отрегулированный угол с использованием постоянной (Тсβ) времени и выдает отрегулированный инерциальный угол (βADJ) 532 бокового скольжения. Постоянную (Тcβ) времени выбирают так, чтобы обеспечить эффективное удаление доли кратковременной турбулентности, которая может присутствовать в измеряемом снаружи угле бокового скольжения (βSEL) 522 посредством фильтра 516 с запаздыванием. Функция постоянной (Тсβ) времени в преобразователе 512 заключается в обеспечении компенсации любой задержки, которую фильтр 516 с запаздыванием может привнести в измеряемый снаружи угол бокового скольжения (βSEL) 522.
[0076] В этом иллюстративном примере суммирующий блок 514 имеет вход, соединенный с выходом преобразователя 512. Этот другой ввод суммирующего блока 514 принимает измеряемый снаружи угол бокового скольжения (βSEL) 522. Суммирующий блок 514 выдает суммарный угол бокового скольжения (βSUM) 534.
[0077] Фильтр 516 с запаздыванием также называется фильтром нижних частот. Фильтр 516 с запаздыванием реализует следующее выражение:
 , где
, где
s - параметр частоты в виде комплексного числа для преобразования Лапласа в фильтре, входным значением которого является суммарный угол бокового скольжения (βSUM) 534, а
 - постоянная времени, которая также используется в преобразователе 512.
- постоянная времени, которая также используется в преобразователе 512.
[0078] Как показано на чертежах, фильтр 516 с запаздыванием выдает отфильтрованный угол бокового скольжения (βAF) 501. В этом иллюстративном примере отфильтрованный угол бокового скольжения (βAF) 501 используют в контуре обратной связи в качестве входного сигнала, подаваемого в определитель 502 скорости изменения инерциального угла бокового скольжения.
[0079] Система 400 фильтрации углов атаки по ФИГ. 4 и система 500 фильтрации углов бокового скольжения являются примерами систем фильтрации, которые могут быть использованы в системе 202 регистрации аэродинамических углов по ФИГ. 2. Эти две системы фильтрации являются примерами адаптивных систем комплементарных фильтров, которые уменьшают шум и обеспечивают более быстрое реагирование на устойчивые порывы ветра по сравнению с используемыми в настоящее время системами фильтрации.
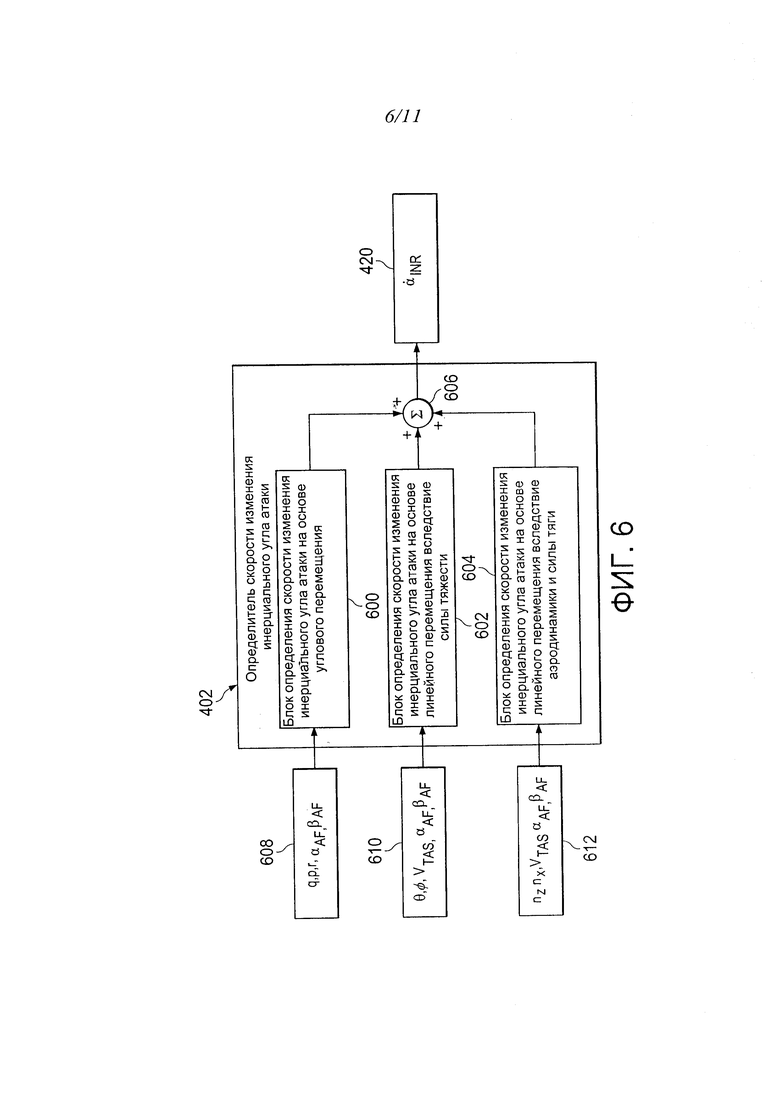
[0080] Далее на ФИГ. 6 показана схема определителя скорости изменения инерциального угла атаки в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере показана одна реализация определителя 402 скорости изменения инерциального угла атаки по ФИГ. 4. Как показано на чертежах, определитель 402 скорости изменения инерциального угла атаки включает в себя:
- блок 600 определения скорости изменения инерциального угла атаки на основе углового перемещения,
- блок 602 определения скорости изменения инерциального угла атаки на основе линейного перемещения вследствие силы тяжести,
- блок 604 определения скорости изменения инерциального угла атаки на основе линейного перемещения вследствие аэродинамики и силы тяги и
- суммирующий блок 606.
Эти различные составляющие определяют различные вклады и комбинируют их для вычисления скорости изменения 420 инерциального угла атаки.
[0081] В этом иллюстративном примере блок 600 определения скорости изменения инерциального угла атаки на основе углового перемещения определяет составляющую скорости изменения 420 инерциального угла атаки на основе углового перемещения летательного аппарата 204 по ФИГ. 2. Эти вычисления выполняют с использованием входных значений 608. В этом иллюстративном примере входными значениями 608 являются q, р, r, αAF и βAF. Входные значения 608 используют в следующем выражении:

[0082] Блок 602 определения скорости изменения инерциального угла атаки на основе линейного перемещения вследствие силы тяжести определяет еще один вклад скорости изменения  420 инерциального угла атаки на основе силы тяжести. В этом примере указанный вклад вычисляют с использованием входных значений 610. Как показано на чертежах, входными значениями 610 являются θ, φ, VTAS, αAF и βAF. Входные значения 610 используют в следующем выражении для производства вычислений в блоке 602 определения скорости изменения инерциального угла атаки на основе линейного перемещения вследствие силы тяжести:
420 инерциального угла атаки на основе силы тяжести. В этом примере указанный вклад вычисляют с использованием входных значений 610. Как показано на чертежах, входными значениями 610 являются θ, φ, VTAS, αAF и βAF. Входные значения 610 используют в следующем выражении для производства вычислений в блоке 602 определения скорости изменения инерциального угла атаки на основе линейного перемещения вследствие силы тяжести:

[0083] Затем, блок 604 определения скорости изменения инерциального угла атаки на основе линейного перемещения вследствие аэродинамики и силы тяги вычисляет вклад скорости изменения  420 инерциального угла атаки на основе аэродинамики и силы тяги летательного аппарата 204 по ФИГ. 2. Вклад в этот блок вычисляют с использованием входных значений 612, которыми являются nz, nх, VTAS, αAF и βAF. Входные значения 612 используют в следующем выражении для вычисления вклада:
420 инерциального угла атаки на основе аэродинамики и силы тяги летательного аппарата 204 по ФИГ. 2. Вклад в этот блок вычисляют с использованием входных значений 612, которыми являются nz, nх, VTAS, αAF и βAF. Входные значения 612 используют в следующем выражении для вычисления вклада:
[0084] Суммирующий блок 606 суммирует различные вклады. Выходной сигнал суммирующего блока 606 представляет собой скорость изменения  420 инерциального угла атаки.
420 инерциального угла атаки.
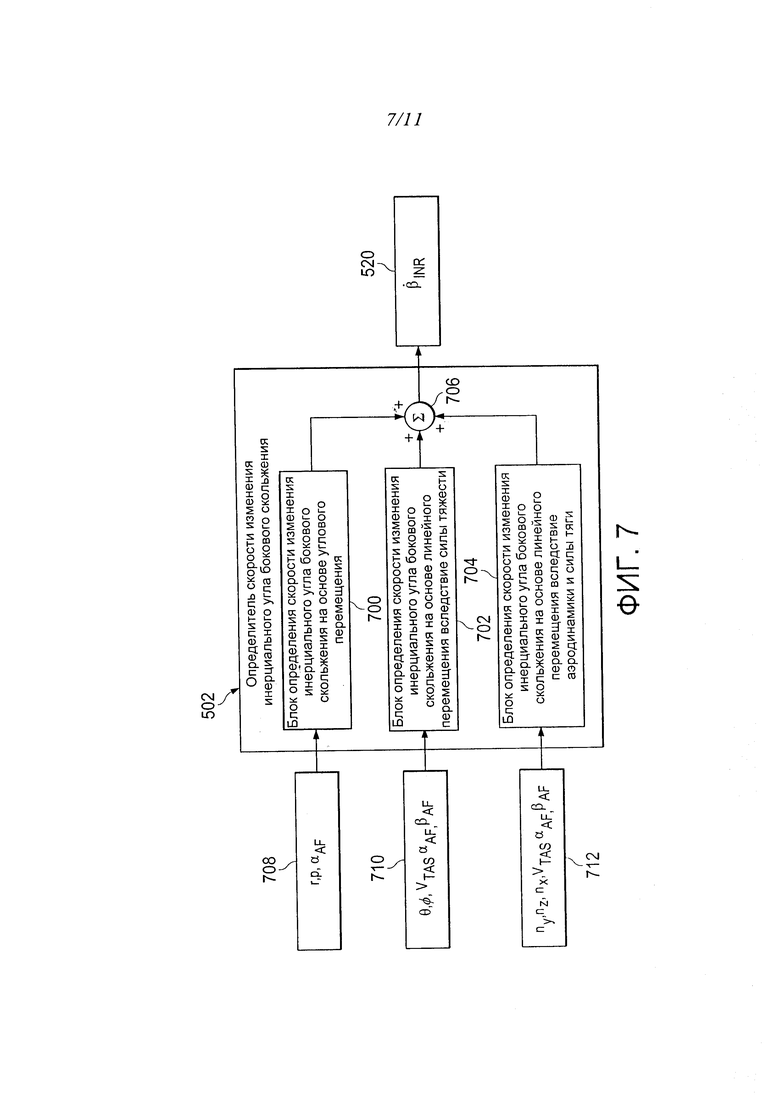
[0085] Далее на ФИГ. 7 показан определитель скорости изменения инерциального угла бокового скольжения в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере показана одна реализация определителя 502 скорости изменения инерциального угла бокового скольжения по ФИГ. 5. Как показано на чертежах, определитель 502 скорости изменения инерциального угла бокового скольжения включает в себя:
- блок 700 определения скорости изменения инерциального угла бокового скольжения на основе углового перемещения,
- блок 702 определения скорости изменения инерциального угла бокового скольжения на основе линейного перемещения вследствие силы тяжести,
- блок 704 определения скорости изменения инерциального угла бокового скольжения на основе линейного перемещения вследствие аэродинамики и силы тяги и
- суммирующий блок 706.
Эти различные составляющие определяют различные вклады и комбинируют их для вычисления скорости изменения  520 инерциального угла бокового скольжения.
520 инерциального угла бокового скольжения.
[0086] В этом иллюстративном примере блок 700 определения скорости изменения инерциального угла бокового скольжения на основе углового перемещения определяет вклад скорости изменения  520 инерциального угла бокового скольжения на основе углового перемещения летательного аппарата 204 по ФИГ. 2. Эти вычисления выполняют с использованием входных значений 708. Входными значениями 708 являются r, р и αAF. Входные значения 708 используют в следующем выражении:
520 инерциального угла бокового скольжения на основе углового перемещения летательного аппарата 204 по ФИГ. 2. Эти вычисления выполняют с использованием входных значений 708. Входными значениями 708 являются r, р и αAF. Входные значения 708 используют в следующем выражении:
-r cosαAF + p sinαAF
[0087] Блок 702 определения скорости изменения инерциального угла бокового скольжения на основе линейного перемещения вследствие силы тяжести определяет еще одну составляющую скорости изменения  520 инерциального угла бокового скольжения на основе линейного перемещения вследствие силы тяжести. В этом примере указанный вклад вычисляют с использованием входных значений 710. Как показано на чертежах, входными значениями 710 являются θ, φ, VTAS, αAF и βAF. Входные значения 710 используют в следующем выражении:
520 инерциального угла бокового скольжения на основе линейного перемещения вследствие силы тяжести. В этом примере указанный вклад вычисляют с использованием входных значений 710. Как показано на чертежах, входными значениями 710 являются θ, φ, VTAS, αAF и βAF. Входные значения 710 используют в следующем выражении:

[0088] Далее, блок 704 определения скорости изменения инерциального угла бокового скольжения на основе линейного перемещения вследствие аэродинамики и силы тяги вычисляет составляющую скорости изменения  520 инерциального угла бокового скольжения на основе линейного перемещения вследствие аэродинамики и силы тяги летательного аппарата 204 по ФИГ. 2. Вклад в этом блоке вычисляют с использованием входных значений 712, которыми являются nY, nZ, nX, VTAS, αAF и βAF. Входные значения 712 используют в следующем выражении для вычисления вклада:
520 инерциального угла бокового скольжения на основе линейного перемещения вследствие аэродинамики и силы тяги летательного аппарата 204 по ФИГ. 2. Вклад в этом блоке вычисляют с использованием входных значений 712, которыми являются nY, nZ, nX, VTAS, αAF и βAF. Входные значения 712 используют в следующем выражении для вычисления вклада:

[0089] Суммирующий блок 706 суммирует различные вклады. Выходной сигнал суммирующего блока 706 представляет собой скорость изменения  520 инерциального угла бокового скольжения.
520 инерциального угла бокового скольжения.
[0090] Иллюстрация среды 200 регистрации аэродинамических углов и различных компонентов на ФИГ. 2-7 не подразумевает наложения каких-либо физических или архитектурных ограничений на способ, которым может быть реализован иллюстративный вариант реализации изобретения. Могут быть использованы компоненты, отличающиеся от проиллюстрированных, в дополнение или вместо них. Некоторые компоненты могут быть необязательными. Также, указанные блоки показаны для иллюстрации некоторых функциональных компонентов. Один или более из этих блоков могут быть скомбинированы, разделены или скомбинированы и разделены на другие блоки при использовании в иллюстративном варианте реализации изобретения.
[0091] Например, фильтр 308 по ФИГ. 3 также может включать в себя другие компоненты, такие как преобразователь для преобразования отрегулированного вклада 314 по ФИГ. 3, выдаваемого регулятором 306 по ФИГ. 3 исходя из скорости изменения угла для использования при выработке отфильтрованного аэродинамического угла 206 по ФИГ. 2-3. В другом иллюстративном примере различные вклады, используемые для вычисления скорости изменения  420 инерциального угла атаки по ФИГ. 6 и скорости изменения
420 инерциального угла атаки по ФИГ. 6 и скорости изменения  520 инерциального угла бокового скольжения по ФИГ. 7, могут отличаться в различных иллюстративных примерах. Например, по меньшей мере одно такое перемещение, как угловое перемещение, линейное перемещение вследствие силы тяжести или линейное перемещение вследствие аэродинамики и силы тяги может быть использовано при вычислении этих скоростей изменения.
520 инерциального угла бокового скольжения по ФИГ. 7, могут отличаться в различных иллюстративных примерах. Например, по меньшей мере одно такое перемещение, как угловое перемещение, линейное перемещение вследствие силы тяжести или линейное перемещение вследствие аэродинамики и силы тяги может быть использовано при вычислении этих скоростей изменения.
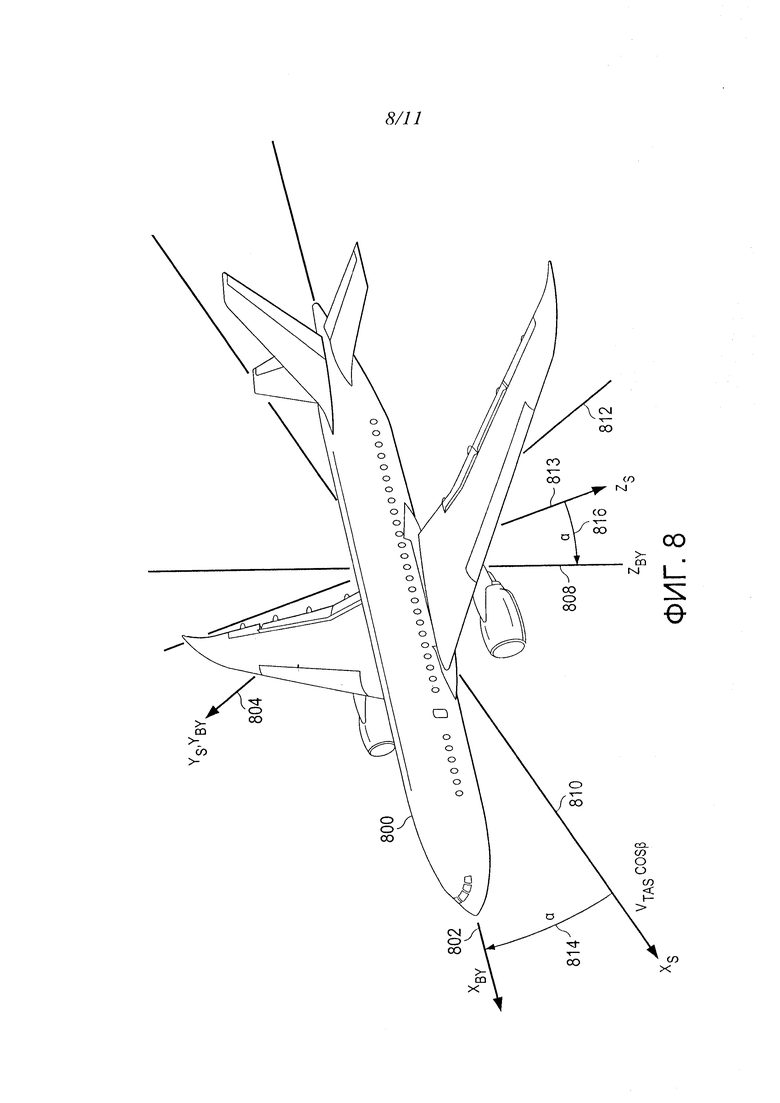
[0092] Далее на ФИГ. 8 показаны углы атаки в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере летательный аппарат 800 имеет ось X 802, ось Y 804 и ось Z 808 связанной системы координат. Эти оси связанной системы координат расположены относительно планера летательного аппарата 800. Например, ось X 802 связанной системы координат проходит через осевую линию фюзеляжа летательного аппарата 800; ось Z 808 связанной системы координат проходит вниз в плоскости симметрии летательного аппарата 800; а ось Y 804 связанной системы координат проходит перпендикулярно оси X 802 и оси Z 808 связанной системы координат.
[0093] Летательный аппарат 800 также имеет ось X 810, ось Y 812 и ось Z 813 полусвязанной системы координат. Как показано на чертежах, ось Y 812 полусвязанной системы координат совпадает с осью Y 804 связанной системы координат. Угол атаки (α) 814 является углом между осью X 802 связанной системы координат и осью X 810 полусвязанной системы координат. Ось X 810 полусвязанной системы координат повернута от оси X 802 связанной системы координат на угол атаки (α) 814.
[0094] Угол атаки (α) 816 является углом между осью Z 808 связанной системы координат и осью Z 813 полусвязанной системы координат. Ось Z 813 полусвязанной системы координат повернута от оси Z 808 связанной системы координат на угол атаки (α) 816. Как показано на чертежах, угол атаки (α) 816 по существу аналогичен углу атаки (α) 814.
[0095] В данном описании реализаций системы 400 фильтрации углов атаки по ФИГ. 4 и системы 500 фильтрации углов бокового скольжения по ФИГ. 5, nX, nY и nZ являются коэффициентами нагрузок в связанной системе координат по оси X 802, оси Y 804 и оси Z 808 связанной системы координат, соответственно. Также, р, q и r являются составляющими угловой скорости в связанной системе координат относительно оси X 802, оси Y 804 и оси Z 808 связанной системы координат, соответственно.
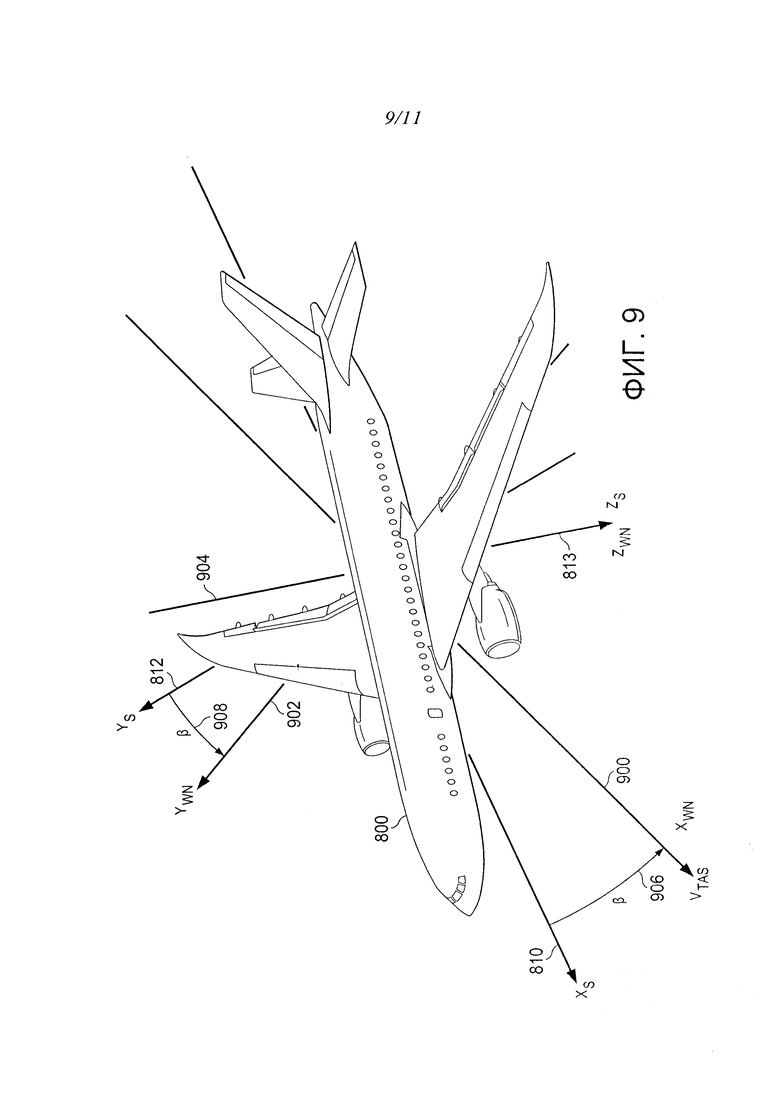
[0096] На ФИГ. 9 показаны углы бокового скольжения, в соответствии с иллюстративным вариантом реализации изобретения. На этом чертеже показаны ось X 810, ось Y 812 и ось Z 813 полусвязанной системы координат для летательного аппарата 800. Кроме того, летательный аппарат 800 имеет ось X 900, ось Y 902 и ось Z 904 поточной системы координат.
[0097] Показаны угол бокового скольжения (β) 906 и угол бокового скольжения (β) 908. Угол бокового скольжения (β) 906 является углом между осью X 810 полусвязанной системы координат и осью X 900 поточной системы координат. Угол бокового скольжения (β) 908 является углом между осью Y 812 полусвязанной системы координат и осью Y 902 поточной системы координат. Угол бокового скольжения (β) 906 по существу аналогичен углу бокового скольжения (β) 908.
[0098] Как показано на чертежах, ось X 900 поточной системы координат выбирают на основе потока ветра относительно летательного аппарата 800. Две другие оси задают на основе выбора оси X 900 поточной системы координат в этом иллюстративном примере. В этом примере ось Z 904 поточной системы координат совпадает с осью Z 813 полусвязанной системы координат.
[0099] Со ссылкой на ФИГ. 10 показана иллюстрация структурной схемы процесса обработки аэродинамических углов для летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения. Процесс, проиллюстрированный на ФИГ. 10 реализуют в системе 202 регистрации аэродинамических углов, показанной в блочной форме по ФИГ. 2. Этот процесс может быть реализован в аппаратных средствах, программном обеспечении или какой-либо их комбинации.
[00100] Процесс начинают с вычисления первой скорости изменения инерциального аэродинамического угла летательного аппарата с использованием данных, принимаемых от инерциальной измерительной системы летательного аппарата, и отфильтрованного аэродинамического угла (операция 1000). Операция 1000 может быть выполнена посредством вычисления первой скорости изменения инерциального аэродинамического угла на основе по меньшей мере одного такого перемещения, как угловое перемещение, линейное перемещение вследствие силы тяжести или линейное перемещение вследствие аэродинамики и силы тяги. Согласно процессу выполняют вычисление второй скорости изменения измеренного аэродинамического угла летательного аппарата с использованием данных, принимаемых от системы измерения воздушных данных летательного аппарата (операция 1002).
[00101] Согласно процессу вырабатывают отфильтрованный аэродинамический угол во время полета летательного аппарата с использованием первой скорости изменения инерциального аэродинамического угла и второй скорости изменения измеренного аэродинамического угла (операция 1004). Отфильтрованный аэродинамический угол является сигналом обратной связи при выполнении операции 1000.
[00102] Вклад первой скорости изменения инерциального аэродинамического угла, используемого при выработке отфильтрованного аэродинамического угла, изменяют на основе разности между первой скоростью изменения инерциального аэродинамического угла и второй скоростью изменения измеренного аэродинамического угла (операция 1006), после чего процесс завершают. Результат указанного процесса обеспечивает возможность работы и управления полетом летательного аппарата с использованием отфильтрованного аэродинамического угла.
[00103] Далее на ФИГ. 11 показана иллюстрация структурной схемы процесса изменения вклада скорости изменения инерциального аэродинамического угла в соответствии с иллюстративным вариантом реализации изобретения. Процесс, проиллюстрированный на ФИГ. 11, является примером выполнения операции 1006 по ФИГ. 10.
[00104] Процесс начинают определением разности между скоростью изменения инерциального аэродинамического угла и скоростью изменения измеренного аэродинамического угла (операция 1100). Согласно процессу определяют значение ослабления с использованием указанной разности в экспоненциальной функции (операция 1102).
[00105] Согласно процессу умножают скорость изменения инерциального аэродинамического угла на указанное значение ослабления для регулировки вклада скорости изменения инерциального аэродинамического угла (операция 1104). После этого процесс завершают.
[00106] Структурные схемы и блок-схемы в различных изображенных вариантах реализации изобретения иллюстрируют архитектуру, функциональность и работу некоторых возможных вариантов осуществления устройств и способов в иллюстративном варианте реализации изобретения. В этой связи, каждый блок в структурных схемах или блок-схемах может представлять по меньшей мере один объект из группы, включающей: модуль, сегмент, функцию или часть операции или этапа. Например, один или более блоков могут быть реализованы в виде программного кода, в аппаратных средствах или комбинации программного кода и аппаратных средств. При реализации в аппаратных средствах аппаратные средства могут, например, принимать форму интегральных схем, которые изготовлены или выполнены с возможностью осуществления одной или более операций в структурных схемах или блок-схемах. При реализации в виде комбинации программного кода и аппаратных средств реализация может принимать форму прошивки. Каждый блок в указанной блок-схеме может быть реализован с использованием систем аппаратных средств специального назначения, которые выполняют различные операции, или с использованием комбинаций аппаратных средств и программного кода специального назначения, запущенных на таком аппаратном средстве специального назначения.
[00107] В некоторых альтернативных реализациях иллюстративного варианта изобретения функция или функции, описанные в блоках, могут иметь место не в том порядке, который показан на фигурах чертежей. Например, в некоторых случаях, два блока, показанные последовательно, могут быть выполнены по существу одновременно, или блоки иногда могут быть выполнены в обратном порядке, в зависимости от используемой функциональности. Также, другие блоки могут быть добавлены в дополнение к блокам, показанным в структурной схеме или блок-схеме.
[00108] Иллюстративные варианты реализации раскрытия изобретения могут быть описаны в контексте способа 1200 изготовления и обслуживания летательного аппарата, как показано на ФИГ. 12, и летательного аппарата 1300, как показано на ФИГ. 13. На ФИГ. 12 показана блок-схема способа изготовления и обслуживания летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения. Во время подготовки к производству способ 1200 изготовления и обслуживания летательного аппарата может включать в себя разработку спецификации и проектирование, 1202, летательного аппарата 1300 и материально-техническое снабжение 1204.
[00109] Во время производства может иметь место изготовление компонентов и сборочных узлов, 1206, и интеграция систем, 1208, летательного аппарата 1300. Изготовление компонентов и сборочных узлов, 1206, и интеграция систем, 1208, также могут включать в себя систему 202 регистрации аэродинамических углов по ФИГ. 2. После этого, летательный аппарат 1300 может пройти этапы сертификации и доставки, 1210, для ввода в эксплуатацию 1212. Еще в одном примере в процессе эксплуатации заказчиком летательный аппарат 1212 может проходить регламентное техобслуживание и текущий ремонт, 1214, которые могут включать в себя модернизацию, перенастройку, переоборудование и другое техобслуживание или текущий ремонт.
[00110] Каждый из процессов способа 1200 изготовления и обслуживания летательного аппарата может быть выполнен или осуществлен системным интегратором, третьей стороной, оператором или какой-либо их комбинацией. В указанных примерах оператор может являться заказчиком. Для целей настоящего описания системный интегратор может включать в себя, помимо прочего, любое количество производителей летательных аппаратов и субподрядчиков по основным системам; третья сторона может включать в себя, помимо прочего, любое количество продавцов, субподрядчиков и поставщиков; а оператор может представлять собой авиакомпанию, лизинговую компанию, военную организацию, обслуживающую организацию и т.д.
[00111] Далее на ФИГ. 13 показана блок-схема летательного аппарата, в котором может быть реализован иллюстративный вариант реализации. В этом примере летательный аппарат 1300 изготавливают способом 1200 изготовления и обслуживания летательного аппарата по ФИГ. 12, и он может включать в себя корпус 1302 с множеством систем 1304 и внутреннюю часть 1306. Примеры систем 1304 включают в себя одну или более движительных систем 1308, систему 1310 электроснабжения, гидравлическую систему 1312 и систему 1314 управления окружающей средой. Может быть включено любое количество других систем. Хотя показан пример, относящийся к аэрокосмической отрасли, различные варианты реализации настоящего изобретения могут быть реализованы в других отраслях промышленности, таких как автомобильная промышленность.
[00112] Устройства и способы, раскрытые в настоящем документе, могут быть использованы во время по меньшей мере одного из этапов способа 1200 изготовления и обслуживания летательного аппарата по ФИГ. 12. Например, система 202 регистрации аэродинамических углов по ФИГ. 2 может быть изготовлена и установлена как часть летательного аппарата 1300 во время этапа изготовления компонентов и сборочных узлов, 1206, и интеграции систем, 1208, летательного аппарата.
[00113] В другом иллюстративном примере компоненты или сборочные узлы, изготовленные во время изготовления компонентов и сборочных узлов, 1206, по ФИГ. 12 могут быть изготовлены или произведены аналогично компонентам или сборочным узлам, изготовленным при нахождении летательного аппарата 1300 в эксплуатации 1212 по ФИГ. 12. Еще в одном иллюстративном примере один или более вариантов реализации устройств, способов или их комбинации могут быть использованы во время этапов производства, например изготовления компонентов и сборочных узлов, 1206, и интеграции систем, 1208 по ФИГ. 12.
[00114] Один или более вариантов реализации устройств, способов или их комбинации могут быть использованы при нахождении летательного аппарата 1300 в эксплуатации 1212, во время регламентного техобслуживания и ремонта 1214 по ФИГ. 12 или и того и другого. Например, модернизация, перенастройка, переоборудование и другое техобслуживание или текущий ремонт 1214 могут включать в себя дополнительные системы 202 регистрации аэродинамических углов по ФИГ. 2 для летательного аппарата 1300. Также, при вводе в эксплуатацию 1212, система 202 регистрации аэродинамических углов может быть использована для определения аэродинамических углов для использования при работе летательного аппарата 1300.
[00115] Таким образом, представлены одно или более технических решений, которыми решается техническая проблема, связанная с определением аэродинамических углов с меньшим уровнем шума с необходимыми быстротой и точностью. Например, обеспечивается возможность определения углов атаки и углов бокового скольжения, при которых уменьшен шум в данных от систем датчиков. Кроме того, регистрация указанных углов может происходить быстрее и точнее по сравнению с используемыми в настоящее время системами фильтрации. В результате, одно или более технических решений обеспечивают возможность получения технического результата, при котором уменьшен шум, и определение аэродинамического угла производят быстрее и точнее по сравнению с известными системами фильтрации. Одно или более технических решений используют инерциальный аэродинамический угол и измеряемый снаружи аэродинамический угол, в которых регулируют вклады инерциального аэродинамического угла. Вклад скорости изменения инерциального аэродинамического угла регулируют на основе разностей между скоростью изменения инерциального аэродинамического угла и скоростью изменения измеряемого снаружи аэродинамического угла.
[00116] С помощью системы регистрации аэродинамических углов в этих иллюстративных примерах шум от кратковременной турбулентности может быть уменьшен с учетом устойчивых порывов ветра и с меньшим запаздыванием. Результатом указанной обработки является отфильтрованный аэродинамический угол, который используют для управления работой летательного аппарата. Например, когда отфильтрованный аэродинамический угол представляет собой угол атаки, отфильтрованный аэродинамический угол может быть использован для выработки сигнала о приближении к сваливанию. В других примерах отфильтрованный аэродинамический угол может быть использован системой обработки данных, такой как автопилот или система управления полетом в летательном аппарате, для управления полетом летательного аппарата.
[00117] Описание различных иллюстративных вариантов реализации изобретения было представлено в целях иллюстрации, и это описание не является исчерпывающим или ограниченным раскрытыми формами реализации настоящего изобретения. Различные иллюстративные примеры описывают компоненты, которые выполняют действия или операции. В иллюстративном варианте реализации изобретения компонент может быть выполнен с возможностью осуществления описанных операции или действия. Например, компонент может иметь конфигурацию или конструкцию, подходящую для структуры, которая обеспечивает возможность выполнения указанным компонентом действия или операции, описанной как выполненная посредством указанного компонента в приведенных иллюстративных примерах.
[00118] Многие модификации и изменения будут очевидны специалистам в данной области техники. Кроме того, различные иллюстративные варианты реализации изобретения могут обеспечивать различные признаки по сравнению с другими иллюстративными вариантами реализации изобретения. Вариант или варианты реализации изобретения выбраны и описаны для того, чтобы лучше объяснить принципы его осуществления, практического применения и дать представление специалистам о различных вариантах с различными модификациями, которые подходят для конкретного использования изобретения другими специалистами в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ КОМПЕНСАЦИИ ПОРЫВА ВОЗДУШНОЙ МАССЫ ДЛЯ ВОЗДУШНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2706679C2 |
| ВЫПУСКНЫЕ КЛАПАНЫ ВОССТАНОВЛЕНИЯ ТЯГИ ДЛЯ ИСПОЛЬЗОВАНИЯ С ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2017 |
|
RU2723371C2 |
| СПОСОБ И УСТРОЙСТВО ВЫЧИСЛЕНИЯ ТЕКУЩЕГО ЗНАЧЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2663315C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАБЕГАЮЩЕГО ПОТОКА ЛЕТАТЕЛЬНОГО АППАРАТА В ПОЛЕТЕ НА РЕЖИМАХ ПЛАНИРОВАНИЯ С ГИПЕРЗВУКОВЫМИ ИЛИ ДОЗВУКОВЫМИ СКОРОСТЯМИ ДВИЖЕНИЯ | 1998 |
|
RU2135974C1 |
| Способ формирования адаптивного сигнала угловой стабилизации по крену летательного аппарата | 2023 |
|
RU2809632C1 |
| СИСТЕМА И СПОСОБ ОЦЕНКИ ВОЗДУШНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОСНОВАНИИ МОДЕЛИ НАКОПЛЕНИЯ ДАННЫХ О ПОГОДЕ. | 2018 |
|
RU2755843C2 |
| АВИАЦИОННО-КОСМИЧЕСКИЙ КОМПЛЕКС, САМОЛЕТ, МНОГОСТУПЕНЧАТАЯ РАКЕТА И СПОСОБ ЗАПУСКА КОСМИЧЕСКОГО АППАРАТА | 2005 |
|
RU2288136C1 |
| Способ определения углов атаки и скольжения беспилотного летательного аппарата | 2022 |
|
RU2792261C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА НА ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЕ, ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2017 |
|
RU2738927C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ ГИПЕРЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2347193C1 |
Группа изобретений относится к устройству, системе и способу регистрации аэродинамических углов. Для реализации способа вычисляют первою и вторую скорости изменения аэродинамических углов, вычисляют отфильтрованный аэродинамический угол для возможности управления летательным аппаратом при устойчивом порыве ветра. 3 н. и 15 з.п. ф-лы, 13 ил.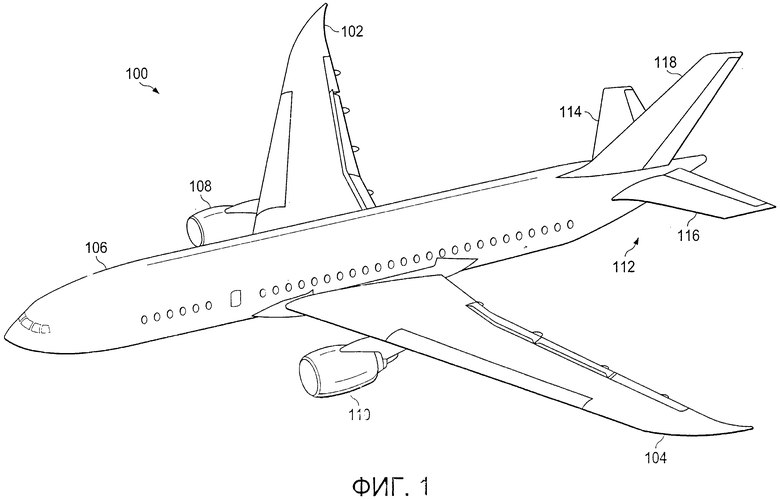
1. Устройство регистрации аэродинамических углов, содержащее:
систему (202) регистрации аэродинамических углов, которая:
выполнена с возможностью вычисления первой скорости изменения (212) инерциального аэродинамического угла (214) летательного аппарата (204) с использованием данных (208), принимаемых от инерциальной измерительной системы (216) летательного аппарата (204);
выполнена с возможностью вычисления второй скорости изменения (218) измеряемого снаружи аэродинамического угла (220) летательного аппарата (204);
выполнена с возможностью выработки отфильтрованного аэродинамического угла (206) во время полета летательного аппарата (204) с использованием первой скорости изменения (212) инерциального аэродинамического угла (214) и второй скорости изменения (218) измеряемого снаружи аэродинамического угла (220); и
выполнена с возможностью изменения вклада (222) первой скорости изменения (212) инерциального аэродинамического угла (214), используемого при выработке отфильтрованного аэродинамического угла (206), на основе разности между первой скоростью изменения (212) инерциального аэродинамического угла (214) и второй скоростью изменения (218) измеряемого снаружи аэродинамического угла (220) таким образом, что вклад (222) первой скорости изменения (212) инерциального аэродинамического угла (214) увеличен при возникновении турбулентности во время полета летательного аппарата (204), и вклад (222) первой скорости изменения (212) инерциального аэродинамического угла (214) уменьшен при возникновении устойчивого порыва ветра, обеспечивая возможность управления полетом летательного аппарата (204) с использованием отфильтрованного аэродинамического угла (206).
2. Устройство по п. 1, также содержащее:
контроллер (226), выполненный с возможностью управления полетом летательного аппарата (204) с использованием отфильтрованного аэродинамического угла (206).
3. Устройство по п. 1, в котором вклад (222) первой скорости изменения (212) инерциального аэродинамического угла (214) изменен для уменьшения воздействия по меньшей мере одного такого фактора, как порыв ветра или турбулентность.
4. Устройство по п. 1, в котором при регулировке вклада (222) первой скорости изменения (212) инерциального аэродинамического угла (214) на основе разности между первой скоростью изменения (212) инерциального аэродинамического угла (214) и второй скоростью изменения (218) измеряемого снаружи аэродинамического угла (220) система (202) регистрации аэродинамических углов:
определяет разность между первой скоростью изменения (212) инерциального аэродинамического угла (214) и второй скоростью изменения (218) измеряемого снаружи аэродинамического угла (220);
определяет значения (310) ослабления с использованием указанной разности в экспоненциальной функции и умножает первую скорость изменения (212) инерциального аэродинамического угла (214) на значение (310) ослабления для регулировки вклада (222) первой скорости изменения (212) инерциального аэродинамического угла (214).
5. Устройство по п. 1, в котором при изменении вклада (222) первой скорости изменения (212) инерциального аэродинамического угла (214), используемого при выработке отфильтрованного аэродинамического угла (206), на основе разности между первой скоростью изменения (212) инерциального аэродинамического угла (214) и второй скоростью изменения (218) измеряемого снаружи аэродинамического угла (220), система (202) регистрации аэродинамических углов вычисляет первую скорость изменения (212) инерциального аэродинамического угла (214) летательного аппарата (204) с использованием данных (208), принимаемых от инерциальной измерительной системы (216) летательного аппарата (204), и отфильтрованного аэродинамического угла (206) в качестве сигнала обратной связи для динамической регулировки первой скорости изменения (212) инерциального аэродинамического угла (214).
6. Устройство по п. 1, в котором при вычислении первой скорости изменения (212) инерциального аэродинамического угла (214) летательного аппарата (204) с использованием данных (208), принимаемых от инерциальной измерительной системы (216) летательного аппарата (204), система (202) регистрации аэродинамических углов вычисляет первую скорость изменения (212) инерциального аэродинамического угла (214) на основе по меньшей мере одного такого перемещения, как угловое перемещение, линейное перемещение вследствие силы тяжести или линейное перемещение вследствие аэродинамики и силы тяги.
7. Устройство по п. 1, в котором инерциальный аэродинамический угол (214) выбран из одного такого угла, как инерциальный угол атаки и инерциальный угол бокового скольжения, а измеряемый снаружи аэродинамический угол (220) выбран из одного такого угла, как измеряемый снаружи угол атаки и измеряемый снаружи угол бокового скольжения.
8. Устройство по п. 1, в котором летательный аппарат (204) выбран из одного такого устройства, как самолет, коммерческий самолет, летательный аппарат вертикального взлёта и посадки (204) и беспилотное воздушное транспортное средство.
9. Система (202) регистрации аэродинамических углов, содержащая:
определитель (300) первой скорости изменения, который выполнен с возможностью вычисления первой скорости изменения (212) инерциального аэродинамического угла (214) для летательного аппарата (204) с использованием данных (208), принимаемых от инерциальной измерительной системы (216) летательного аппарата (204), и отфильтрованного аэродинамического угла (206);
определитель (302) второй скорости изменения, который выполнен с возможностью вычисления второй скорости изменения (218) измеряемого снаружи аэродинамического угла (220) летательного аппарата (204);
определитель (304) ослабления, выполненный с возможностью определения значения (310) ослабления на основе разности между первой скоростью изменения (212) инерциального аэродинамического угла (214) и второй скоростью изменения (218) измеряемого снаружи аэродинамического угла (220), обеспечивая возможность управления полетом летательного аппарата (204) с использованием отфильтрованного аэродинамического угла (206);
регулятор (306), выполненный с возможностью регулировки вклада (222) первой скорости изменения (212) инерциального аэродинамического угла (214) с получением отрегулированного вклада (314); и
фильтр (308), выполненный с возможностью выработки отфильтрованного аэродинамического угла (206) во время полета летательного аппарата (204) с использованием отрегулированного вклада (314), полученного регулировкой регулятором (306), и измеряемого снаружи аэродинамического угла (220), обеспечивая возможность управления полетом летательного аппарата (204) с использованием отфильтрованного аэродинамического угла (206).
10. Система (202) регистрации аэродинамических углов по п. 9, в которой определитель (300) первой скорости изменения выполнен с возможностью вычисления первой скорости изменения (212) инерциального аэродинамического угла (214) летательного аппарата (204) с использованием данных (208), принимаемых от инерциальной измерительной системы (216) летательного аппарата (204), и отфильтрованного аэродинамического угла (206), и определитель (300) первой скорости изменения выполнен с возможностью вычисления первой скорости изменения (212) инерциального аэродинамического угла (214) на основе по меньшей мере одного такого перемещения, как угловое перемещение, линейное перемещение вследствие силы тяжести или линейное перемещение вследствие аэродинамики и силы тяги.
11. Система (202) регистрации аэродинамических углов по п. 9, в которой фильтр (308) является фильтром (416) с запаздыванием.
12. Способ обработки аэродинамических углов летательного аппарата (204), включающий:
вычисление первой скорости изменения (212) инерциального аэродинамического угла (214) летательного аппарата (204) с использованием данных (208), принимаемых от инерциальной измерительной системы (216) летательного аппарата (204), и отфильтрованного аэродинамического угла (206);
вычисление второй скорости изменения (218) измеряемого снаружи аэродинамического угла (220) летательного аппарата (204);
выработку отфильтрованного аэродинамического угла (206) во время полета летательного аппарата (204) с использованием первой скорости изменения (212) инерциального аэродинамического угла (214) и второй скорости изменения (218) измеряемого снаружи аэродинамического угла (220); и
изменение вклада (222) первой скорости изменения (212) инерциального аэродинамического угла (214), используемого при выработке отфильтрованного аэродинамического угла (206), на основе разности между первой скоростью изменения (212) инерциального аэродинамического угла (214) и второй скоростью изменения (218) измеряемого снаружи аэродинамического угла (220) таким образом, что вклад (222) первой скорости изменения (212) инерциального аэродинамического угла (214) увеличивают при возникновении турбулентности во время полета летательного аппарата (204), и вклад (222) первой скорости изменения (212) инерциального аэродинамического угла (214) уменьшают при возникновении устойчивого порыва ветра, обеспечивая возможность управления полетом летательного аппарата (204) с использованием отфильтрованного аэродинамического угла (206).
13. Способ по п. 12, также включающий:
управление полетом летательного аппарата (204) с использованием отфильтрованного аэродинамического угла (206).
14. Способ по п. 12, согласно которому вклад (222) первой скорости изменения (212) инерциального аэродинамического угла (214) изменяют для уменьшения воздействия по меньшей мере одного такого фактора, как порыв ветра или турбулентность.
15. Способ по п. 12, согласно которому при регулировке вклада (222) первой скорости изменения (212) инерциального аэродинамического угла (214) на основе разности между первой скоростью изменения (212) инерциального аэродинамического угла (214) и второй скоростью изменения (218) измеряемого снаружи аэродинамического угла (220) выполняют:
определение разности между первой скоростью изменения (212) инерциального аэродинамического угла (214) и второй скоростью изменения (218) измеряемого снаружи аэродинамического угла (220);
определение значения (310) ослабления с использованием указанной разности в экспоненциальной функции и умножение первой скорости изменения (212) инерциального аэродинамического угла (214) на значение (310) ослабления для регулировки вклада (222) первой скорости изменения (212) инерциального аэродинамического угла (214).
16. Способ по п. 12, согласно которому при вычислении первой скорости изменения (212) инерциального аэродинамического угла (214) летательного аппарата (204) с использованием данных (208), принимаемых от инерциальной измерительной системы (216) летательного аппарата (204), и отфильтрованного аэродинамического угла (206) выполняют:
вычисление первой скорости изменения (212) инерциального аэродинамического угла (214) на основе по меньшей мере одного такого перемещения, как угловое перемещение, линейное перемещение вследствие силы тяжести или линейное перемещение вследствие аэродинамики и силы тяги.
17. Способ по п. 12, согласно которому инерциальный аэродинамический угол (214) выбран из одного такого угла, как инерциальный угол атаки и инерциальный угол бокового скольжения, а измеряемый снаружи аэродинамический угол (220) выбран из одного такого угла, как измеряемый снаружи угол атаки и измеряемый снаружи угол бокового скольжения.
18. Способ по п. 12, согласно которому летательный аппарат (204) выбран из одного такого устройства, как самолет, коммерческий самолет, летательный аппарат вертикального взлёта и посадки и беспилотное воздушное транспортное средство.
| 0 |
|
SU159568A1 | |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| US 0006928341 B2, 09.08.2005 | |||
| US 0006273370 B1, 14.08.2001 | |||
| US 0009242723 B2, 26.01.2016. | |||

