Изобретение относится к области весоизмерительной техники и может быть использовано при взвешивании как малых, так и больших грузов, например, в лесозаготовительной и строительно-дорожной технике, а именно в погрузчиках в условиях эксплуатации.
Известен способ взвешивания груза на рычажных весах, а именно весах, содержащих двуплечий рычаг - коромысло. В данном способе вес груза измеряют после гашения колебаний рычажной системы. Датчиком перемещений фиксируют колебания двуплечего рычага и преобразуют их в цифровой код (авторское свидетельство СССР №1631304, G01G 7/00, от 28.02.91).
Недостатками известного способа являются длительность процесса измерения, низкая точность.
Наиболее близким по технической сущности и достигаемому результату является способ взвешивания груза, включающий взвешивание груза с помощью весоизмерительного устройства, содержащего установленный на основании на опоре рычаг с грузоприемным элементом на конце рычага и датчиком, укрепленным на основании, а также контроллер с визуализацией измерений (патент РФ №2308678, G01C 9/00, от 20.10.2007).
Недостатками известного способа взвешивания грузов являются длительность процесса измерения, низкая точность и невозможность использования взвешивания как малых, так и больших грузов (объектов труда), например, в лесозаготовительной и строительно-дорожной технике в процессе ее эксплуатации.
Технической задачей, на решение которой направлено заявленное изобретение, является уменьшение времени на проведение измерений, повышение точности, а также взвешивание как малых, так и больших грузов, например, в лесозаготовительной и строительно-дорожной технике.
Решение указанной задачи достигается тем, что в способе взвешивания груза, включающем взвешивание груза с помощью весоизмерительного устройства, содержащего установленный на основании на опоре рычаг с грузоприемным элементом на конце рычага и датчиком, укрепленным на основании, а также контроллер с визуализацией измерений, согласно изобретению при взвешивании груза вначале выполняют тарировку груза тензометрическим способом с использованием тензометрического элемента, а затем, используя данные, полученные при тарировке груза, производят фактическое взвешивание груза с применением гидравлической системы, включающей гидроцилиндр, насосную станцию, распределитель и датчики давления в штоковой и поршневой полости гидроцилиндра, при этом датчики давления передают результаты фактического взвешивания на контроллер с сенсорным дисплеем с визуализацией измерений, при этом перед фактическим взвешиванием груза контроллер автоматически отключает от работы тензометрический элемент с помощью электромагнитной муфты и включает в работу гидравлическую систему.
Техническая задача совпадает с техническим решением.
Использование в способе взвешивания вышеуказанных приемов позволяет уменьшить время на проведение и обработку измерений и повысить точность взвешивания как малых, так и больших грузов, например, в лесозаготовительной и строительно-дорожной технике в процессе ее эксплуатации за счет мобильности и технологичности весоизмерительного устройства, а также простой установки на технологическом оборудовании.
За счет предварительного взвешивания с применением тарировки груза тензометрическим способом обеспечивают точность фактического взвешивания.
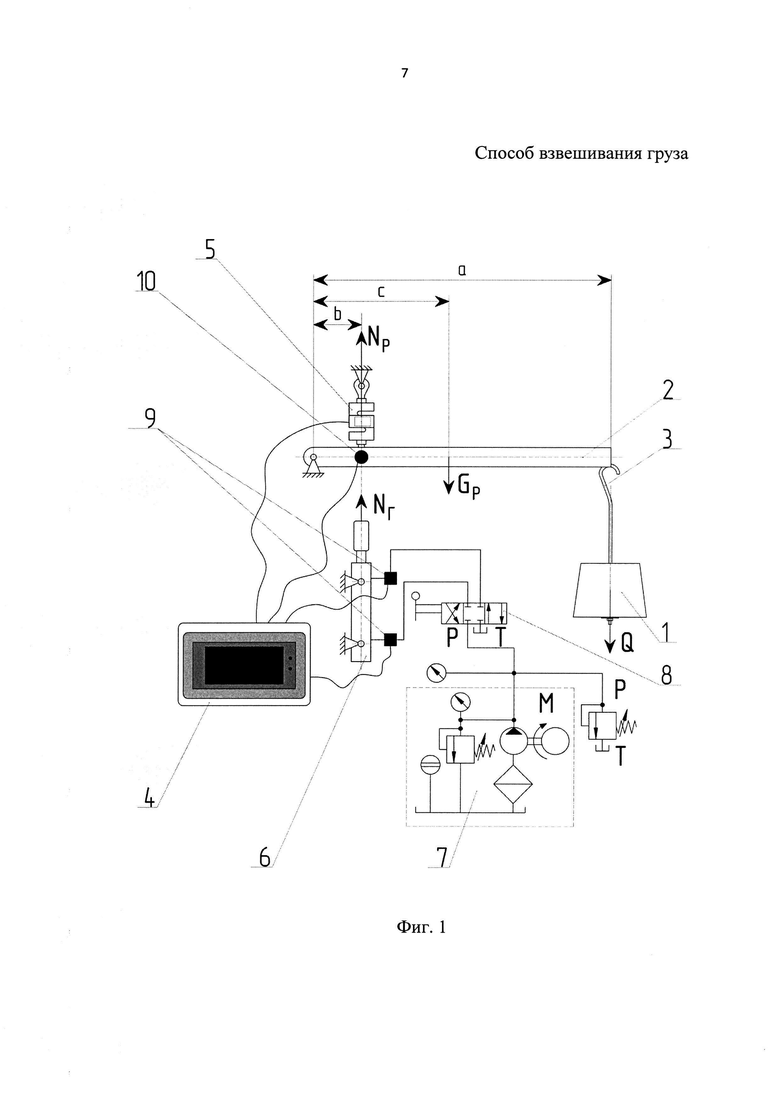
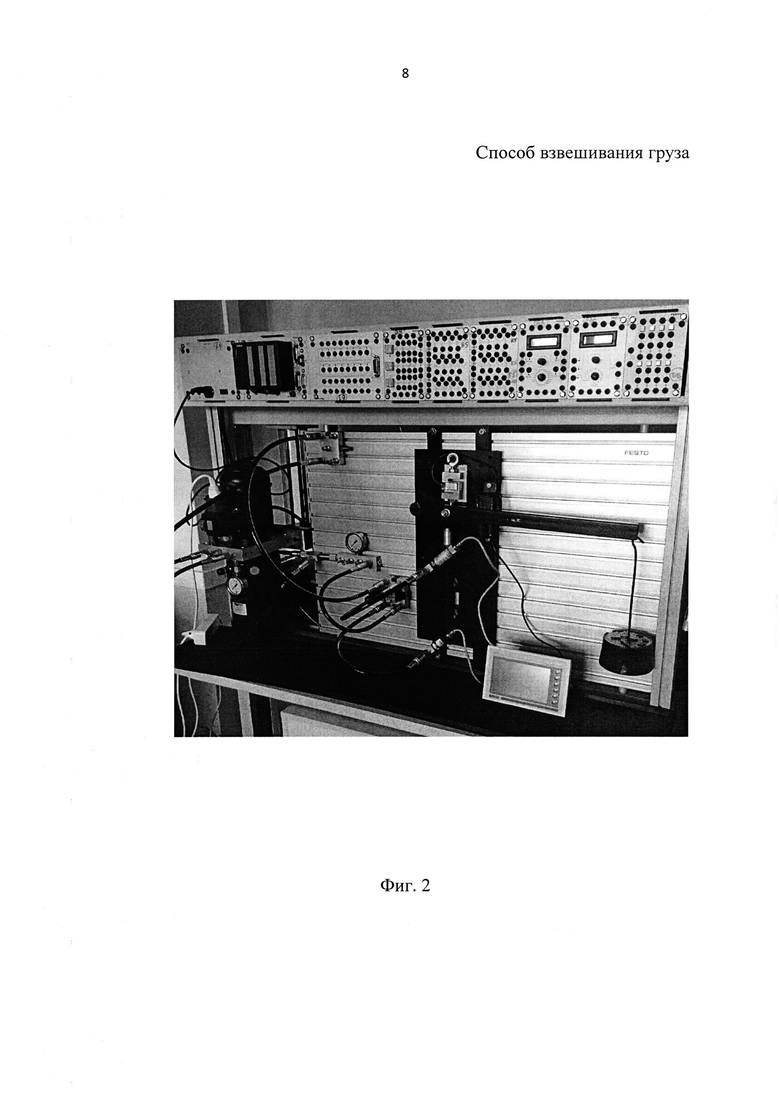
Способ взвешивания поясняется чертежами, где на фиг. 1 приведена структурная схема устройства, используемого для взвешивания груза; на фиг. 2 - общий вид опытного образца весоизмерительного устройства (фото).
Для реализации способа взвешивания груза 1 используют весоизмерительное устройство, которое содержит установленный на основании на опоре рычаг 2 с грузоприемным элементом 3 на конце рычага 2 и датчиком, укрепленным на основании, контроллер 4 с визуализацией измерений. В качестве датчика используют тензометрический элемент 5 для тарировки груза 1, а для фактического взвешивания груза 1 применена гидравлическая система, включающая гидроцилиндр 6, насосную станцию 7, распределитель 8 и датчики давления 9 в штоковой и поршневой полости гидроцилиндра 6, которые установлены с возможностью передачи результатов взвешивания на контроллер 4, который имеет сенсорный дисплей с визуализацией измерений. Весоизмерительное устройство оборудовано электромагнитной муфтой 10 управляемой контроллером 4, которая выполнена с возможностью автоматического отключения тензометрического элемента 5 перед работой гидравлической системы.
Способ осуществляется следующим образом.
Некоторый груз 1 подвешивают на грузоприемный элемент 3, который расположен на конце рычага 2 на расстоянии а до центра оси опоры рычага 2. На рычаге 2 закреплен тензометрический элемент 5 на расстоянии b до центра оси опоры рычага 2. Тензометрический элемент 5 в свою очередь передает аналоговый сигнал на контроллер 4 с дисплеем. Контроллер 4 преобразует аналоговый сигнал в цифровой код, равный измеряемой силе. Далее в контроллере 4 производится перерасчет силы растяжения в вес груза 1 при помощи формулы (1).

где Q - вес груза, кг; а - расстояние от центра оси опоры до центра оси грузоприемного элемента, мм; b - расстояние от центра оси опоры до центра оси датчика, мм; с - расстояние от центра оси опоры до центра тяжести рычага, мм; Np - сила растяжения, кН; Gp - вес рычага, кН; 9800 - коэффициент перевода размерной единицы из Н в кг.
После тарировки груза 1 тензометрическим способом начинает работу гидравлическая система. Перед проведением взвешивания контроллер 4 с дисплеем автоматически отключает из работы тензометрический элемент 5 с помощью электромагнитной муфты 10.
Насосная станция 7 подает жидкость на распределитель 8, а он в свою очередь подает жидкость в поршневую полость гидроцилиндра 6, который поднимает рычаг 2 с оттарированным грузом 1. Гидроцилиндр 6 закреплен перпендикулярно рычагу 2, штоком вверх, на расстоянии b до центра оси опоры рычага 2. Контроллер 4 с дисплеем принимает с датчиков давления 9 аналоговые сигналы и преобразует их в цифровые коды, равные соответственно давлению в штоковой и в поршневой полости. После этого производят расчет фактического груза по формуле (2), которая внесена в программу контроллера:

где Q1 - вес груза, равный весу рычага, кг; Q - оттарированный вес груза, кг; Р1 - давление в гидроцилиндре при весе Q1, бар; Р2 - давление в гидроцилиндре при весе Q, бар; Qф - фактический вес взвешиваемого груза, кг; Р - текущее давление в гидроцилиндре, бар.
Разработан опытный образец для реализации предлагаемого изобретения, на котором выполняют взвешивания груза до 20 кг. Устройство реализовано на гидравлическом стенде немецкого производства FESTO «Гидравлика 2000».
Таким образом, предлагаемое изобретение позволяет по сравнению с аналогами уменьшить время на проведение измерений, повысить точность, а также обеспечить взвешивание как малых, так и больших грузов, например, в лесозаготовительной и строительно-дорожной технике за счет мобильности и несложного монтажа весоизмерительного устройства на технологическом оборудовании этих машин.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания груза | 2017 |
|
RU2658583C1 |
| Бункерные весы с системой автоматической калибровки | 2024 |
|
RU2828706C1 |
| Устройство для регулирования усилия прижима прикатного ролика к оправке | 2020 |
|
RU2735286C1 |
| Весовое устройство | 1990 |
|
SU1779947A1 |
| МОНОРЕЛЬСОВЫЕ ВЕСЫ | 1992 |
|
RU2057302C1 |
| АВТОМОБИЛЕРАЗГРУЗОЧНЫЙ ВЕСОВОЙ КОМПЛЕКС | 2011 |
|
RU2453817C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ СЛИТКОВ | 1996 |
|
RU2156963C2 |
| СПОСОБ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ВЕСА ПЕРЕМЕЩАЕМЫХ МАТЕРИАЛОВ НА ЛЕНТОЧНЫХ КОНВЕЙЕРАХ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ВЕСОВАЯ РОЛИКООПОРА ЛЕНТОЧНОГО КОНВЕЙЕРА | 2009 |
|
RU2401994C1 |
| СПОСОБ СОЗДАНИЯ КОНТРОЛИРУЕМОЙ СИЛЫ ПРИ ПРОВЕРКЕ ВЕСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2530786C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА ЗАГОТОВОК | 1991 |
|
RU2012855C1 |
Изобретение относится к области весоизмерительной техники и может быть использовано при взвешивании как малых, так и больших грузов, например, в лесозаготовительной и строительно-дорожной технике, а именно в погрузчиках в условиях эксплуатации. В способе взвешивания груза, включающем взвешивание груза с помощью весоизмерительного устройства, содержащего установленный на основании на опоре рычаг с грузоприемным элементом на конце рычага и датчиком, укрепленным на основании, а также контроллер с визуализацией измерений, согласно изобретению при взвешивании груза вначале выполняют тарировку груза тензометрическим способом с использованием тензометрического элемента, а затем, используя данные, полученные при тарировке груза, производят фактическое взвешивание груза с применением гидравлической системы, включающей гидроцилиндр, насосную станцию, распределитель и датчики давления в штоковой и поршневой полости гидроцилиндра. При этом датчики давления передают результаты фактического взвешивания на контроллер с сенсорным дисплеем с визуализацией измерений, при этом перед фактическим взвешиванием груза контроллер автоматически отключает от работы тензометрический элемент с помощью электромагнитной муфты и включает в работу гидравлическую систему. Технический результат заключается в уменьшении времени на проведение измерений, повышении точности, а также взвешивании как малых, так и больших грузов, например, в лесозаготовительной и строительно-дорожной технике. 2 ил.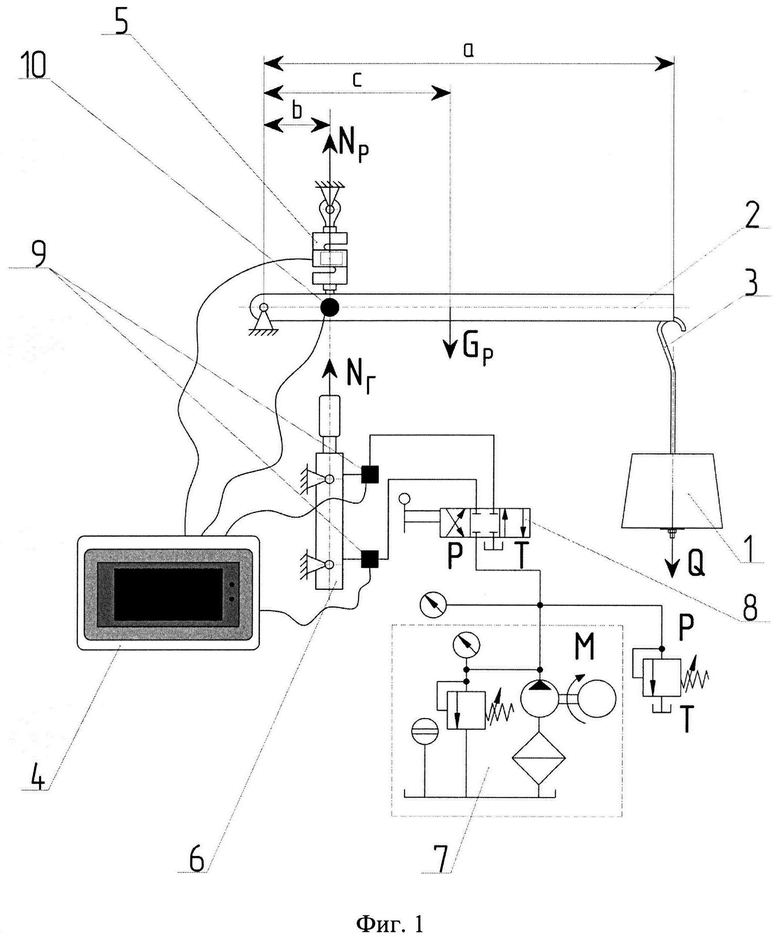
Способ взвешивания груза, включающий взвешивание груза с помощью весоизмерительного устройства, содержащего установленный на основании на опоре рычаг с грузоприемным элементом на конце рычага и датчиком, укрепленным на основании, а также контроллер с визуализацией измерений, отличающийся тем, что при взвешивании груза вначале выполняют тарировку груза тензометрическим способом с использованием тензометрического элемента, а затем, используя данные, полученные при тарировке груза, производят фактическое взвешивание груза с применением гидравлической системы, включающей гидроцилиндр, насосную станцию, распределитель и датчики давления в штоковой и поршневой полости гидроцилиндра, при этом датчики давления передают результаты фактического взвешивания на контроллер с сенсорным дисплеем с визуализацией измерений, при этом перед фактическим взвешиванием груза контроллер автоматически отключает от работы тензометрический элемент с помощью электромагнитной муфты и включает в работу гидравлическую систему.
| СПОСОБ ВЗВЕШИВАНИЯ ГРУЗОВ НА РЫЧАЖНЫХ ВЕСАХ И ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2006 |
|
RU2308678C1 |
| Весоизмерительное устройство | 1989 |
|
SU1631304A1 |
| Жидкость для шариков-индикаторов, моделирующих частицы воды или наносов во время гидрологических измерений | 1941 |
|
SU70365A1 |

