Изобретение относится к антенной технике и области радиотехнических систем и может быть использовано, например, в системах радиотехнического контроля.
Известны различные способы измерения диаграмм направленности антенн источников радиоизлучения (ИРИ), местоположение которых известно.
В частности, известен способ измерения азимутальной диаграммы направленности антенны (ДНА) [1, Патент РФ №2298198, Способ измерения азимутальной диаграммы направленности антенны. МПК G01S 3/46, опубл. 27.04.2007, бюл. №12], включающий измерение на выбранной частоте азимутальной диаграммы направленности антенны, установленной на оси проводящего диска, заклепанного на поворотном устройстве стенда антенных измерений, при этом на той же частоте и при том же начальном приближении поворотного устройства производят измерения азимутальной диаграммы направленности вспомогательной штыревой антенны, а искомую азимутальную диаграмму направленности исследуемой антенны получают путем вычитания значений, полученных при измерении азимутальной диаграммы направленности исследуемой антенны и последующего нормирования полученной разностной функции.
Недостатком способа является их нереализуемость в случае неизвестного положения исследуемой антенны относительно измерительной антенны.
Известны способы измерения ДНА с известным положением методом ее облета самолетом или иным летно-подъемным средством (ЛПС) [2, Патент SU №1778713, Способ измерения пространственных характеристик передающей антенны. МПК G01R 29/10, опубл. 30.11.1992, бюл. №44], [3, с. 256-259 - Фрадин А.Э., Рыжков Е.В. Измерения параметров антенно-фидерных устройств. 2-е доп. изд. - М.: Связь, 1972. - 317 с], [4, с. 128-135 - Цейтлина Н.М. Методы измерения характеристик антенн СВЧ. - М.: Радио и связь, 1985. - 368 с.]; [5, Мартыненко Ю.Н., Сергеев В.Л., Страхов А.Ф., Тарасов Н.С. О комплексной автоматизации измерений радиотехнических параметров антенн // Материалы всесоюзной научно-технической конференции по радиотехническим измерениям. - Новосибирск: СНИИМ, 1970] [6, с. 44 - Толкачев А.А., Шилов А.В. Технологии радиолокации. - М.: Вече, 2010. - 424 с.], [7, с. 218 - Вартанесян В.А., Гойхман Э.Ш., Рогаткин М.И. Радиопеленгация. - М.: Воениздат МО СССР, 1966. - 248 с.].
Недостатком этих способов является их нереализуемость в случае неизвестного положения исследуемой антенны.
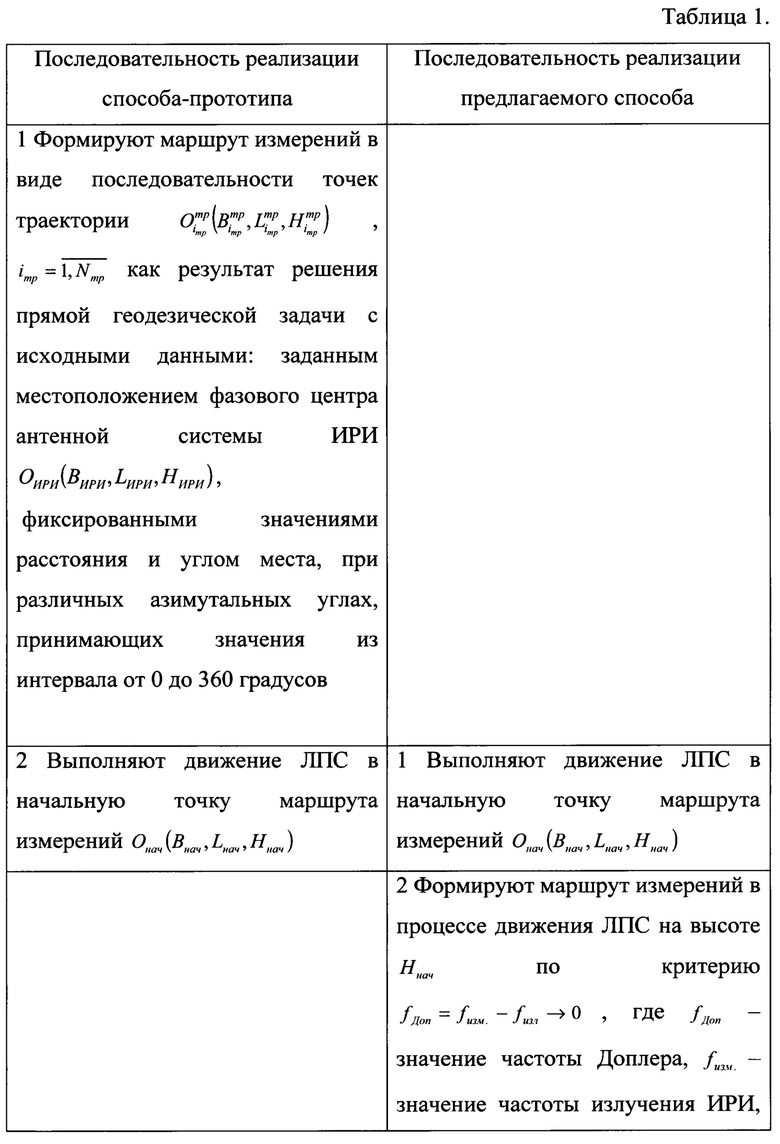
Также известен способ измерения параметров излучения крупноапертурных антенн с помощью беспилотного летательного аппарата [8, с. 95-103 - Классен В.И., Просвиркин И.А. Измерение параметров излучения крупноапертурных ФАР с помощью беспилотного летательного аппарата. // Радиотехника. - 2014. - №4. - С. 95-103], направленный на измерение ДНА, принятый за прототип, который включает в себя:
- формирование маршрута измерений в виде последовательности точек траектории  ,
,  , как результата решения прямой геодезической задачи с исходными данными: заданным местоположением фазового центра антенной системы ИРИ ОИРИ(ВИРИ,LИРИ,НИРИ), фиксированными значениями расстояния и углом места, при различных азимутальных углах, принимающих значения из интервала от 0 до 360 градусов;
, как результата решения прямой геодезической задачи с исходными данными: заданным местоположением фазового центра антенной системы ИРИ ОИРИ(ВИРИ,LИРИ,НИРИ), фиксированными значениями расстояния и углом места, при различных азимутальных углах, принимающих значения из интервала от 0 до 360 градусов;
- вывод ЛПС в начальную точку маршрута измерений Онач(Внач,Lнач,Ннач);
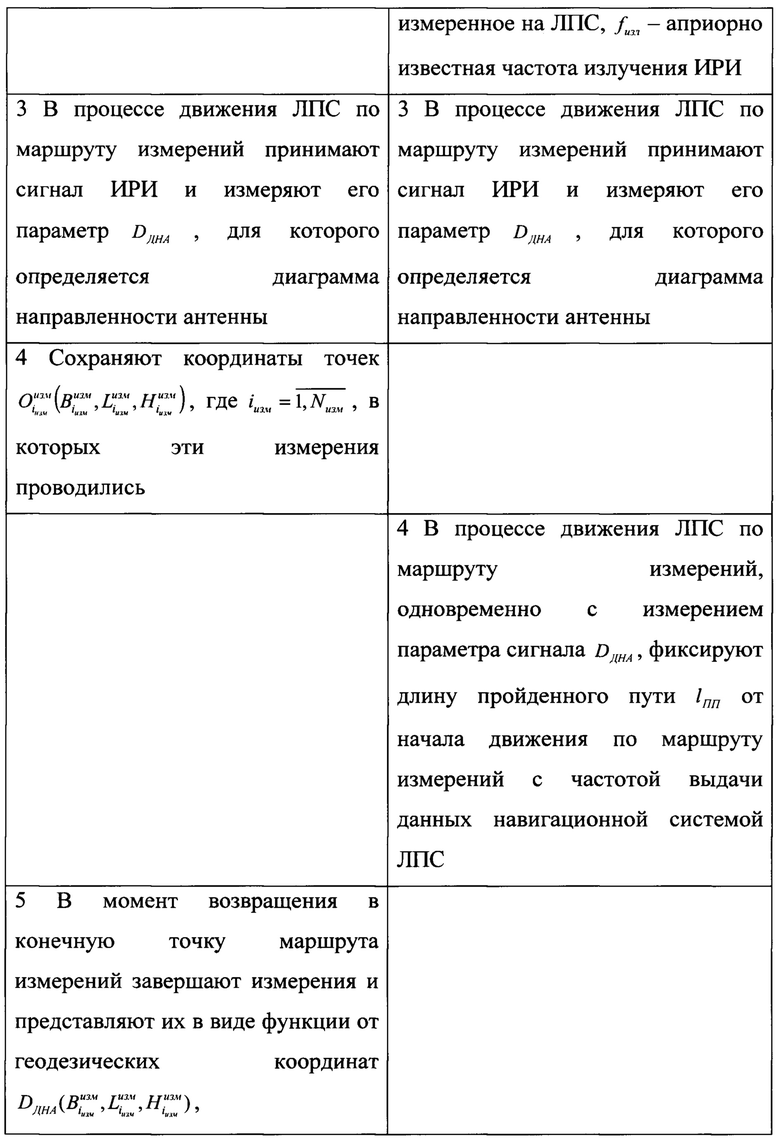
- в процессе движения ЛПС по маршруту измерений прием сигнала ИРИ, измерение его параметра DDНA, для которого определяется ДНА;
- сохранение координат точек  ,
,
где  , в которых эти измерения проводились;
, в которых эти измерения проводились;
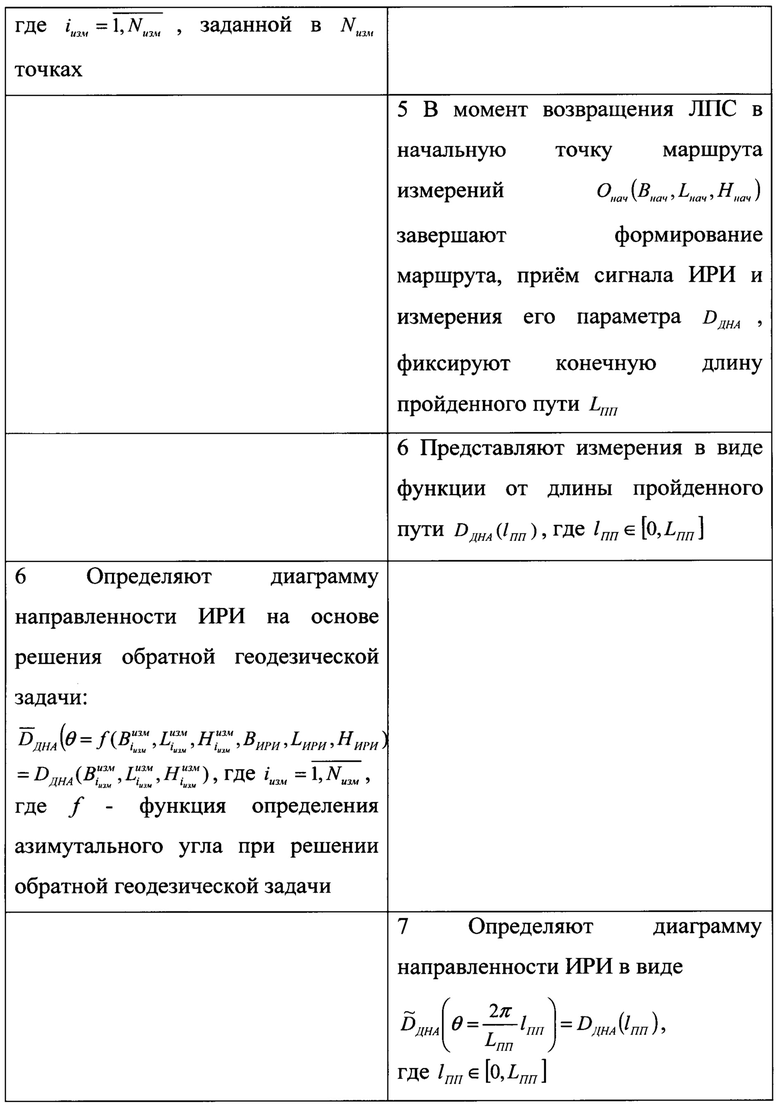
- в момент возвращения в конечную точку маршрута измерений завершения измерений и представление измерений в виде функции от геодезических координат  ,
,
где заданной в Nизм точках.
- определение ДНА ИРИ на основе решения обратной геодезической задачи:
 ,
,
где , а ƒ - функция определения азимутального угла на основе решения обратной геодезической задачи.
Способ обеспечивает возможность измерения диаграммы направленности крупноапертурных антенн на известной частоте и с известным местоположением при помощи летно-подъемного средства (ЛПС). Данный способ представлен в еще одном источнике литературы [9, с. 60-65 - Классен В., Просвиркин И., Измерение параметров излучения крупноапертурных антенн с помощью беспилотного летательного аппарата. // Технологии и средства связи. - 2014. - №1. - С. 60-65].
Недостатком способа-прототипа является его нереализуемость в случае неизвестного положения исследуемой антенны.
Задачей изобретения является расширение арсенала технических средств измерения ДНА ИРИ в условиях отсутствия информации о ее местоположении.
Для решения поставленной задачи предлагается способ измерения ДНА ИРИ, местоположение которого неизвестно, при котором выполняют движение ЛПС в начальную точку маршрута измерений Онач(Внач,Lнач,Ннач), принимают сигнал ИРИ и измеряют его параметр DДНА, для которого определяется ДНА, в процессе движения ЛПС по маршруту измерений.
Согласно изобретению, формируют маршрут измерений в процессе движения ЛПС на высоте Ннач по критерию
ƒДоп=ƒизм.-ƒизл→0,
где ƒДоп - значение частоты Доплера;
ƒизм - значение частоты излучения ИРИ, измеренное на ЛПС;
ƒизл - априорно известная частота излучения ИРИ,
в процессе движения ЛПС по маршруту измерений, одновременно с измерением параметра сигнала DДНА и фиксируют длину пройденного пути  от начала движения по маршруту измерений с частотой выдачи данных навигационной системой ЛПС, в момент возвращения ЛПС в начальную точку маршрута измерений Онач(Внач,Lнач,Ннач) завершают формирование маршрута, прием сигнала ИРИ и измерения его параметра DДHA, фиксируют конечную длину пройденного пути LПП, представляют измерения в виде функции от длины пройденного пути
от начала движения по маршруту измерений с частотой выдачи данных навигационной системой ЛПС, в момент возвращения ЛПС в начальную точку маршрута измерений Онач(Внач,Lнач,Ннач) завершают формирование маршрута, прием сигнала ИРИ и измерения его параметра DДHA, фиксируют конечную длину пройденного пути LПП, представляют измерения в виде функции от длины пройденного пути  ,
,
где  , формируют ДНА ИРИ в виде
, формируют ДНА ИРИ в виде
где  .
.
Техническим результатом является реализация измерения ДНА ИРИ с использованием ЛПС в условиях отсутствия информации о ее местоположении.
Указанный технический результат достигают за счет введения новых операций: измерения маршрута измерений в процессе движения ЛПС на высоте Ннач по критерию ƒДоп=ƒизм.-ƒизл→0,
где ƒДоп - значение частоты Доплера;
ƒизм. - значение частоты излучения ИРИ, измеренное на ЛПС;
ƒизл - априорно известная частота излучения ИРИ,
в процессе движения ЛПС по маршруту измерений, одновременно с измерением параметра сигнала DДHA, фиксирования длины пройденного пути от начала движения по маршруту измерений с частотой выдачи данных навигационной системой ЛПС, в момент возвращения ЛПС в начальную точку маршрута измерений Онач(Внач,Lнач,Ннач) завершения формирования маршрута, приема сигнала ИРИ и измерения его параметра DДНA, фиксирования конечной длины пройденного пути LПП, представления измерений в виде функции от длины пройденного пути ,
где  , определения ДНА ИРИ в виде
, определения ДНА ИРИ в виде
где .
На чертеже приведена структурная схема устройства, реализующего предлагаемый способ измерения ДНА ИРИ, местоположение которого неизвестно.
Сочетание отличительных признаков и свойств предлагаемого способа из литературы неизвестны, поэтому он соответствует критериям новизны и изобретательского уровня.
Способ измерения ДНА ИРИ, местоположение которого неизвестно, реализуется следующим образом:
1. Выполняют движение ЛПС в начальную точку маршрута измерений Онач(Внач,Lнач,Ннач).
2. Формируют маршрут измерений в процессе движения ЛПС на высоте Ннач по критерию ƒДоп=ƒизм.-ƒизл→0,
где ƒДoп - значение частоты Доплера;
ƒизм. - значение частоты излучения ИРИ, измеренное на ЛПС;
fизл - априорно известная частота излучения ИРИ.
3. В процессе движения ЛПС по маршруту измерений принимают сигнал ИРИ и измеряют его параметр DДHA, для которого определяется ДНА.
4. В процессе движения ЛПС по маршруту измерений, одновременно с измерением параметра сигнала DДHA, фиксируют длину пройденного пути от начала движения по маршруту измерений с частотой выдачи данных навигационной системой ЛПС.
5. В момент возвращения ЛПС в начальную точку маршрута измерений Онач(Внач,Lнач,Ннач) завершают формирование маршрута, прием сигнала ИРИ и измерения его параметра DДHA, фиксируют конечную длину пройденного пути LПП.
6. Представляют измерения в виде функции от длины пройденного пути  ,
,
где  .
.
7. Определяют диаграмму направленности ИРИ в виде 
где  .
.
Для реализации пункта 1, выполняют движение ЛПС в выбранную точку в пространстве Онач(Внач,Lнач,Ннач), которая будет являться начальной для формирования маршрута измерений, и запоминают ее координаты.
Для выполнения пункта 2 измеряют частоту излучения ИРИ ƒизм., начиная с момента выхода ЛПС в начальную точку маршрута измерений Онач(Внач,Lнач,Ннач), и производят вычисления значения частоты Доплера ƒДоп=/ƒизм.-ƒизл. По значению ƒДоп в соответствии с функциональной связью
где с - скорость распространения радиоволны;
 - вектор скорости ЛПС;
- вектор скорости ЛПС;
Θ - угол между вектором скорости ЛПС и направлением на ИРИ относительно ЛПС;
 - операция определения модуля, средствами управления ЛПС изменяют направление вектора его скорости v таким образом, чтобы ƒДоп=0, а высота полета оставалась равной Ннач.
- операция определения модуля, средствами управления ЛПС изменяют направление вектора его скорости v таким образом, чтобы ƒДоп=0, а высота полета оставалась равной Ннач.
Для определения ДНА ИРИ необходимым условием выполнения измерений при движении ЛПС по траектории полета является обладание точками этой траектории Oi, i=1, 2,… следующими свойствами:
- равное удаление точек Oi, i=1, 2,… от точки ОИРИ местоположения фазового центра антенной системы ИРИ (si=s, i=1, 2,…);
- равенство углов места βi точек Oi, i=1, 2,… относительно плоскости местного горизонта π1 в точке ОИРИ (βi=β, i=1, 2,…).
Покажем, что при выполнении, в процессе движения ЛПС на заданной высотой Ннач, условия fДоп=0, точки траектории Оi, i=1, 2,… обладают требуемыми перечисленными свойствами.
Поскольку геометрические размеры траектории полета при измерении ДНА ИРИ малы по сравнению с размерами земного эллипсоида, то поверхность Земли в окрестностях точки ОИРИ можно считать плоской. В частности, в качестве этой поверхности примем плоскость местного горизонта в точке ОИРИ, т.е. плоскость π1. Тогда, т.к. высота Ннач постоянна на всем маршруте полета ЛПС, то можно считать, что все точки Oi, i=1, 2,… траектории полета ЛПС лежат в плоскости π2, причем 
Так как при движении ЛПС по траектории выполняется условие ƒДоп=0, то радиальная скорость ЛПС, определяемая выражением
где с - скорость распространения радиоволны;
ƒизл - априорно известная частота излучения ИРИ [10, с. 68 - Зырянов Ю.Т., Белоусов О.А. Основы радиотехнических систем. - ФГБОУ ВПО «ТГТУ», 2011. - 146 с], равна 0.
Если νp=0, то ЛПС не приближается и не удаляется от неподвижного ИРИ, т.е. точки траектории Oi равноудалены от точки ОИРИ местоположения фазового центра антенной системы ИРИ: si=s, i=1,2,…, и первое из требуемых свойств выполняется.
Поскольку геометрическое место точек в пространстве, равноудаленных от некоторой точки, - есть сфера [11, с. 242 - Бескин Л.Н. Стереометрия. - М.: Просвещение, 1971. - 415 с], то точки траектории полета ЛПС Oi, i=1,2,… принадлежат сфере с радиусом s и центром в точке ОИРИ.
Так как точки траектории полета ЛПС Oi, i=1, 2,… принадлежат одновременно плоскости π2 и сфере с центром в точке ОИРИ, а пересечением сферы с плоскостью является окружность [11, с. 243], то траектория полета ЛПС - окружность.
Так как траектория полета ЛПС в виде окружности представляет непрерывную линию, а прямые (OИРИ, Oi) проходят через одну точку ОИРИ, не принадлежащую этой линии, и пересекают непрерывную линию, образованную множеством точек траектории полета ЛПС Oi, i=1, 2,…, то (OИРИ, Oi) образуют коническую поверхность κпов [11, с. 170].
Поскольку тело, ограниченное замкнутой конической поверхностью и плоскостью, пересекающей все ее образующие, является конусом [11, с. 175], то тело, ограниченное κпов и частью плоскости π2, ограниченной траекторией полета ЛПС в виде окружности, будет являться конусом Kкон с вершиной в точке ОИРИ, основанием которого будет являться круг.
Возьмем произвольную плоскость, проходящую через точку вершины ОИРИ конуса Kкон и отрезок - диаметр круга основания этого конуса, концами которого являются точки траектории. Поскольку для всех отрезков [ОИРИ, Oi] их длины  , i=1, 2,…, то пересечением этой произвольной плоскости и конуса Kкон будет являться равнобедренный треугольник с вершиной в точке ОИРИ и прилежащими к ней катетами длиной s. При этом диаметр включает в себя точку, являющуюся центром круга основания конуса Kкон. Так как рассматриваемый треугольник - равнобедренный, то биссектриса его угла ОИРИ будет являться одновременно и медианой, и высотой h [12, с. 35 - Киселев А.П. Геометрия / под ред. Глаголева Н.А. - М.: ФИЗМАЛИТ, 2004. - 328 с.]. Отсюда следует, что вершина ОИРИ проектируется в центр основания конуса Kкон, поэтому конус Kкон будет прямым и круговым [11, с.182].
, i=1, 2,…, то пересечением этой произвольной плоскости и конуса Kкон будет являться равнобедренный треугольник с вершиной в точке ОИРИ и прилежащими к ней катетами длиной s. При этом диаметр включает в себя точку, являющуюся центром круга основания конуса Kкон. Так как рассматриваемый треугольник - равнобедренный, то биссектриса его угла ОИРИ будет являться одновременно и медианой, и высотой h [12, с. 35 - Киселев А.П. Геометрия / под ред. Глаголева Н.А. - М.: ФИЗМАЛИТ, 2004. - 328 с.]. Отсюда следует, что вершина ОИРИ проектируется в центр основания конуса Kкон, поэтому конус Kкон будет прямым и круговым [11, с.182].
Свойствами прямого кругового конуса является наличие двух определяющих его параметров [11, с. 186]. Например, такими параметрами могут являться длина образующих  и угол α между ними и высотой конуса h, являющейся нормалью к плоскости π2 Т.к. плоскости π1 и π2 параллельны, то высота конуса h, также будет является нормалью к плоскости π1 и угол места β1 каждой точки Оi, i=1, 2,… относительно плоскости местного горизонта π1 в точке ОИРИ будет равен β1=90°-α=β. Т.е. второе из требуемых свойств выполняется.
и угол α между ними и высотой конуса h, являющейся нормалью к плоскости π2 Т.к. плоскости π1 и π2 параллельны, то высота конуса h, также будет является нормалью к плоскости π1 и угол места β1 каждой точки Оi, i=1, 2,… относительно плоскости местного горизонта π1 в точке ОИРИ будет равен β1=90°-α=β. Т.е. второе из требуемых свойств выполняется.
Отсюда следует, что при выполнении движения ЛПС на заданной высоте Ннач в условиях ƒДоп=0 точки траектории Oi, i=1, 2,… обладают требуемыми свойствами:
- равное удаление точек Oi, i=1, 2,… от точки ОИРИ местоположения фазового центра антенной системы ИРИ (si=s, i=1,2,…);
- равенство углов места β1 точек Oi, i=1, 2,… относительно плоскости местного горизонта π1 в точке ОИРИ (βi=β, i=1, 2,…), и выполняется необходимое условие измерений для определения ДНА ИРИ.
Для выполнения пунктов 3 и 4 в процессе движения ЛПС по маршруту измерений одновременно фиксируют длину пройденного пути  , принимают сигнал ИРИ и измеряют его параметр DДНА, для которого определяется ДНА.
, принимают сигнал ИРИ и измеряют его параметр DДНА, для которого определяется ДНА.
Для выполнения пунктов 5 и 6, в момент возвращения ЛПС в начальную точку маршрута измерений Онач(Внач,Lнач,Ннач) завершают формирование маршрута измерений, прием сигнала и измерения его параметра DДНA, фиксируют конечную длину пройденного пути LПП, сохраняют сформированный маршрут измерений и измеренные значения параметра сигнала DДНA, представляют сохраненные измерения в виде функции зависимости измеренного значения параметра ИРИ DДНА от длины пройденного пути  ,
,
где  .
.
Для выполнения пункта 7 определяют ДНА ИРИ в виде функции  от азимутального угла θ через функцию значения измеренного параметра DДНA от длины пройденного пути
от азимутального угла θ через функцию значения измеренного параметра DДНA от длины пройденного пути  , т.е.
, т.е.  ,
,
где  .
.
Таким образом, предлагаемый способ имеет следующие отличительные признаки в последовательности его реализации от способа-прототипа, которые представлены в таблице 1.
Из представленной таблицы сравнения последовательностей реализации способа-прототипа и предлагаемого способа видно, что в предлагаемом способе относительно способа-прототипа дополнительно формируют маршрут измерений в процессе движения ЛПС на высоте Ннач по критерию ƒДоп=ƒизм.-ƒизл→0,
где ƒДоп - значение частоты Доплера;
ƒизм. - значение частоты излучения ИРИ, измеренное на ЛПС;
ƒизл - априорно известная частота излучения ИРИ,
в процессе движения по маршруту измерений одновременно: измеряют параметр сигнала DДНA и фиксируют длину пройденного пути от начала движения по маршруту измерений с частотой выдачи данных навигационной системой ЛПС, в момент возвращения ЛПС в начальную точку маршрута измерений Онач(Внач,Lнач,Ннач) завершают формирование маршрута, прием сигнала ИРИ и измерения его параметра DДНA, фиксируют конечную длину пройденного пути LПП, представляют измерения в виде функции от длины пройденного пути  ,
,
где  ,
,
определяют ДНА ИРИ в виде
где .
Что приводит к положительному эффекту - реализации измерения ДНА ИРИ с использованием ЛПС в условиях отсутствия информации о ее местоположении.
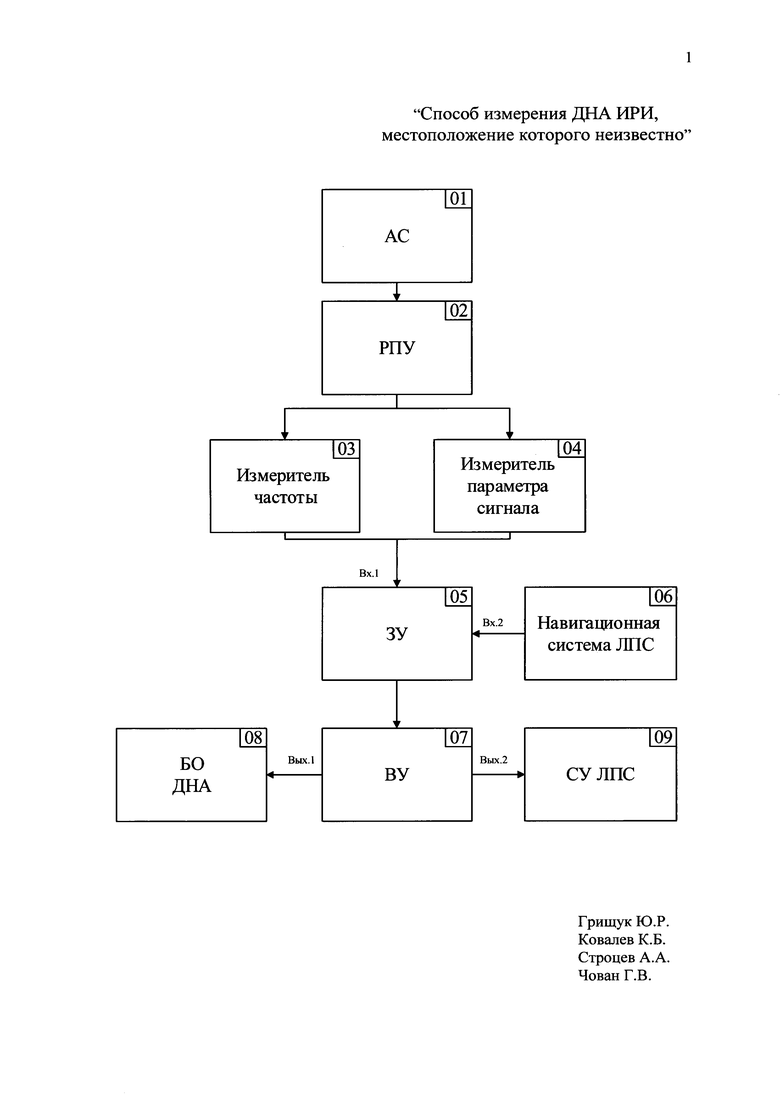
Структурная схема устройства, реализующего предлагаемый способ, изображена на чертеже. В состав устройства входят: антенная система (АС) 01, радиоприемное устройство (РПУ) 02, измеритель частоты 03, измеритель параметра сигнала 04, запоминающее устройство (ЗУ) 05, навигационная система ЛПС 06, вычислительное устройство (ВУ) 07, блок определения диаграммы направленности (БО ДНА) 08, система управления (СУ) ЛПС 09.
AC 01 соединена с РПУ 02, выход которого подключен к входам измерителя частоты 03 и измерителя параметра сигнала 04. Выходы измерителя частоты 03, измерителя параметра сигнала 04 подключены к первому входу ЗУ 05, а выход навигационной системы ЛПС 06 подключен к второму входу ЗУ 05, выход ЗУ 05 соединен с входом ВУ 07. Первый выход ВУ 07 подключен к входу БО ДНА 08, а второй выход ВУ 07 подключен к входу СУ ЛПС 09.
Сигнал ИРИ поступает на АС 01, а затем в РПУ 02, где выполняется прием сигнала и его аналого-цифровое преобразование. Далее цифровой сигнал поступает в измеритель частоты 03, в котором выполняется определение значения частоты принятого сигнала ƒизм., и в измеритель параметра сигнала 04, который определяет параметр DДHA для определения диаграммы направленности. Результаты измерений ƒизм. и DДНA из измерителя частоты 03 и измерителя параметра сигнала 04, соответственно, передаются в ЗУ 05, в то же время в ЗУ 05 поступают данные из навигационной системы ЛПС 06. Из ЗУ 05 эти данные поступают в ВУ 07, где происходит вычисление частоты Доплера, расчет длины пройденного пути и параметров коррекции траектории полета для системы управления ЛПС 09. Из ВУ 07 параметры коррекции траектории полета поступают в систему управления ЛПС 09, где обеспечивается движение ЛПС на высоте Ннач по критерию ƒДоп→0. При возвращении ЛПС в начальную точку маршрута измерений, выходные данные из ВУ 07: значения измеренного параметра, им соответствующие длины пройденного пути, конечная длина пройденного пути LПП, - поступают в БО ДНА 08 для определения ДНА.
Варианты реализации АС 01, рассмотрены в литературе [13, Шпиндлер Э. Практические конструкции антенн - М.: МИР, 1989. - 448 с.], тип используемых антенных элементов определяется местом размещения АС 01. Под фюзеляжем в ЛПС, как правило, используются ненаправленные антенные элементы. РПУ 02 может быть выполнено в виде известных устройств, описанных, например, в [14, с. 37-110 - Сиверса А.П. Проектирование радиоприемных устройств. - М.: Советское радио, 1976. - 486 с.] или [15, с. 28-106 - Рембовский A.M. Мониторинг. Задачи, методы, средства. - М.: Горячая линия - Телеком, 2010. - 624 с.], выбор РПУ будет зависеть от типа принимаемых сигналов и возможности его размещения на используемом ЛПС. Измеритель частоты 03, измеритель параметра сигнала 04, ВУ 07, БО ДНА 08 могут быть реализованы в виде аппаратно-программного средства, например, на микросхемах программируемой логики, описанных в [16, Грушвицкий Р.И. Проектирование систем на микросхемах программируемой логики. - Санкт-Петербург: БХВ, 2002. - 607 с.], обеспечивающих малые габариты и позволяющих использование в ЛПС. Для цифрового сигнала примеры реализуемых подходов измерителя частоты 03, измерителя параметра сигнала 04, если измеряемым параметром является амплитуда сигнала ИРИ, описаны в [17, с. 130-196 - Подлесный С.А. Устройства приема обработки сигналов. - Красноярск: ИПК СФУ, 2008. - 291 с.] или [18, с. 204-265 - Рембовский A.M. Мониторинг. Задачи, методы, средства. - М.: Горячая линия - Телеком, 2010. -624 с.]. Реализация ЗУ 05 описана в [19, Горденов А.Ю. Большие интегральные схемы запоминающих устройств. Справочник. - М.: Радио и связь, 1990. - 288 с.], [20, Лебедев О.Н. Микросхемы памяти и их применение. - М.: Радио и связь, 1990]. Навигационная система ЛПС 06 и СУ ЛПС 09, являются стандартными и входят в состав ЛПС. Тип навигационной системы ЛПС 06 и тип СУ ЛПС 09 определяется используемым ЛПС.
Таким образом, предлагаемый способ, так же как и способ-прототип, позволяет измерять диаграмму направленности антенны. Кроме того, приведенная сравнительная оценка эффективности предлагаемого способа относительно способа-прототипа показывает реализацию измерения ДНА ИРИ с использованием ЛПС на случай отсутствия информации о ее местоположении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2594759C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ СИСТЕМЫ СПУТНИКОВОЙ СВЯЗИ | 2015 |
|
RU2583450C1 |
| СПОСОБ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2023 |
|
RU2832139C1 |
| Способ и устройство определения координат источника радиоизлучения | 2017 |
|
RU2659808C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА РАДИОМОНИТОРИНГА | 2011 |
|
RU2459218C1 |
Изобретение относится к антенной технике и области радиотехнических систем и может быть использовано, например, в системах радиотехнического контроля. Формируют маршрут измерений в процессе движения ЛПС на высоте Ннач по критерию
ƒДоп=ƒизм.-ƒизл→0,
где ƒДоп - значение частоты Доплера;
ƒизм. - значение частоты излучения ИРИ, измеренное на ЛПС;
ƒизл - априорно известная частота излучения ИРИ,
в процессе движения ЛПС по маршруту измерений одновременно с измерением параметра сигнала DДНА фиксируют длину пройденного пути  от начала движения по маршруту измерений с частотой выдачи данных навигационной системой ЛПС, в момент возвращения ЛПС в начальную точку маршрута измерений Онaч(Bнач,Lнaч,Hнaч) завершают формирование маршрута, прием сигнала ИРИ и измерения его параметра DДНA, фиксируют конечную длину пройденного пути LПП, представляют измерения в виде функции от длины пройденного пути DДНA (), где
от начала движения по маршруту измерений с частотой выдачи данных навигационной системой ЛПС, в момент возвращения ЛПС в начальную точку маршрута измерений Онaч(Bнач,Lнaч,Hнaч) завершают формирование маршрута, прием сигнала ИРИ и измерения его параметра DДНA, фиксируют конечную длину пройденного пути LПП, представляют измерения в виде функции от длины пройденного пути DДНA (), где  , определяют ДНА ИРИ в виде
, определяют ДНА ИРИ в виде
 ,
,
где . Техническим результатом является реализация измерения ДНА ИРИ с использованием ЛПС в условиях отсутствия информации о ее местоположении. 1 табл., 1 ил.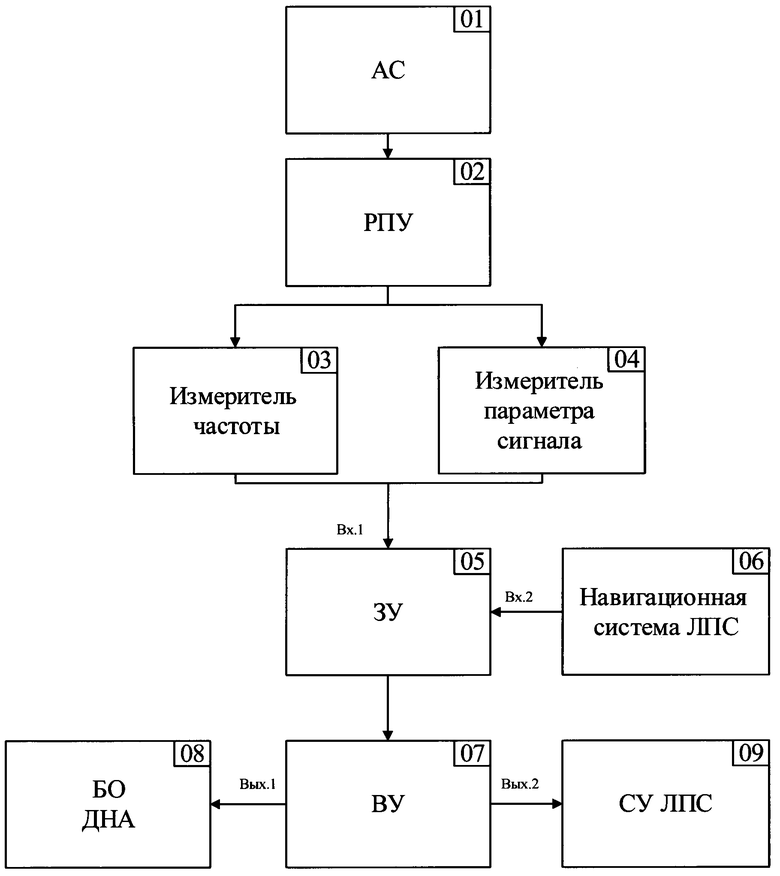
Способ измерения диаграммы направленности антенны источника радиоизлучения, местоположение которого неизвестно, при котором выполняют движение летно-подъемного средства в начальную точку маршрута измерений Онач(Внач, Lнач, Ннач), в процессе движения летно-подъемного средства по маршруту измерений принимают сигнал источника радиоизлучения и измеряют его параметр DДНА, для которого определяется диаграмма направленности антенны, отличающийся тем, что формируют маршрут измерений в процессе движения летно-подъемного средства на высоте Ннач по критерию
ƒДоп=ƒизм.-ƒизл→0,
где ƒДоп - значение частоты Доплера;
ƒизм. - значение частоты излучения источника радиоизлучения, измеренное на летно-подъемном средстве;
ƒизл - априорно известная частота излучения источника радиоизлучения,
в процессе движения летно-подъемного средства по маршруту измерений одновременно с измерением параметра сигнала DДНА фиксируют длину пройденного пути lПП от начала движения по маршруту измерений с частотой выдачи данных навигационной системой летно-подъемного средства, в момент возвращения летно-подъемного средства в начальную точку маршрута измерений Онач(Bнач, Lнач, Hнач) завершают формирование маршрута, прием сигнала источника радиоизлучения и измерения его параметра DДНА, фиксируют конечную длину пройденного пути LПП, представляют измерения в виде функции от длины пройденного пути DДНА (lПП),
где lПП∈[0, LПП],
определяют диаграмму направленности источника радиоизлучения в виде
где lПП∈[0, LПП].
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ДИАГРАММ НАПРАВЛЕННОСТИ АНТЕНН | 2008 |
|
RU2358271C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАГРАММ НАПРАВЛЕННОСТИ АНТЕНН | 1972 |
|
SU429378A1 |
| Способ измерения диаграммы направленности антенны | 1990 |
|
SU1712900A1 |
| 0 |
|
SU189039A1 |

