Предлагаемая группа изобретений относится к области управления, в частности управляемому вооружению, может использоваться в системах управления летательных аппаратов (ЛА), снарядов и ракет, у которых траекторию полета на начальном и среднем участках корректируют по данным приемника сигналов с навигационных космических аппаратов (НКА).
Существует способ наведения управляемого артиллерийского снаряда, оснащенного приемником GPS. Перед выстреливанием снаряда исходные данные о цели, подлежащей поражению, вводят в соответствующий канал блока автоматического управления. В полете при пропадании сигнала снаряд продолжает наводиться по информации, зафиксированной на борту и корректируемой по сигналам от спутников навигационной системы GPS, патент РФ №2527609, публикация 10.09.2014, кл. МПК F42B 15/00, F42B 15/01 /1/.
Данный способ реализован в управляемом артиллерийском снаряде, содержащем блок рулевого управления и блок автоматического управления, в состав которого входят приемник GPS, блок инерционных датчиков и процессор /1/.
Известен способ управления ракеты, оснащенной приемником GPS, в котором при поступлении команды на поражение разведанной цели оператор на пульте управления вводит в ракету координаты цели и производит запуск ракеты. На начальном и среднем участках траектории полета по данным спутниковой системы навигации GPS определяют текущие координаты ракеты и корректируют ее траекторию полета, «Высокоточное оружие зарубежных стран». Том 1. Противотанковые ракетные комплексы: обзорно-аналитический справочник. Государственное унитарное предприятие «Конструкторское бюро приборостроения», Тула, Бедретдинов и Ко, 2008, стр. 519-524 /2/.
Данный способ реализован в управляемой ракете РАМ комплекса NLOS-LS, разрабатываемой фирмой Raytheon Missile Systems (США), содержащей на борту аппаратуру спутниковой навигации (приемник GPS), блок электроники, блок управления с аэродинамическими рулями. Перед стартом при задании координат цели ракета соединена с пультом управления /2/.
Наиболее близким к предлагаемому изобретению является способ управления ЛА, оснащенного системой спутниковой навигации, используемый в способе испытаний беспилотного ЛА и выбранный в качестве прототипа. Данный способ включает задание координат цели, запуск ЛА в фиксированную точку пространства, определение текущих координат ЛА в процессе полета с помощью радионавигационной системы спутниковой навигации, формирование сигнала управления и управление ЛА, изменение параметров и коррекцию траектории полета ЛА посредством отклонения рулей, патент UA №74890, публикация 15.02.2006, кл. МПК F42B 15/01 /3/.
Данный способ реализован в устройстве обеспечения проведения испытаний беспилотного ЛА, выбранном в качестве прототипа и содержащем последовательно соединенные приемную антенну, приемник навигационной информации, бортовой вычислитель, систему управления и блок рулевых приводов, при этом перед пуском для задания координат цели ЛА соединен с пультом управления /3/.
Недостатками всех известных технических решений и прототипа являются следующие факторы. В зависимости от данных целеуказания и программной дальности полета ЛА изменяются параметры, вид его траектории. При полете на значительные дальности, что актуально на современном этапе развития техники, значительно меняется крутизна траектории, происходит разворот оси ЛА, что приводит к рассогласованию диаграммы направленности (ДН) бортовой приемной антенны аппаратуры спутниковой навигации с сигналами от группировки НКА. Вследствие этого коэффициент усиления приемной антенны может уменьшиться в несколько раз. Возникает прерывистость обработки сигналов бортовой аппаратуры спутниковой навигации вплоть до их пропадания, что усложняет функционирование системы управления ЛА с возможной потерей управления.
Поэтому задачей предлагаемой группы изобретений является устранение указанных выше недостатков, а именно: обеспечение надежной бесперебойной связи ЛА с группировкой НКА на всей траектории полета и за счет этого повышение устойчивости системы наведения ЛА.
В способе управления ЛА, оснащенным аппаратурой спутниковой навигации, включающем задание координат цели, запуск ЛА, определение текущих координат ЛА в процессе полета с помощью системы спутниковой навигации, формирование сигнала управления и управление ЛА, коррекцию траектории полета ЛА, поставленная задача достигается тем, что определение текущих координат ЛА дублируют второй аппаратурой спутниковой навигации, у которой ось ДН приемной антенны развернута относительно оси ДН приемной антенны первой аппаратуры спутниковой навигации на угол, при котором суммарная диаграмма направленности системы двух приемных антенн обеспечивает во всех направлениях коэффициент направленного действия не менее 0,5, при этом по количеству видимых спутников в навигации и геометрическому фактору их положения GDOP, определяемым первой и второй аппаратурами спутниковой навигации, оценивают уровень достоверности навигационной информации, а коррекцию траектории полета ЛА производят по текущим координатам, определенным аппаратурой спутниковой навигации с более высоким уровнем достоверности.
В системе управления ЛА, оснащенного аппаратурой спутниковой навигации с приемной антенной, обеспечивающей поступление информации с группировки навигационных космических аппаратов (НКА), содержащей пульт управления и последовательно соединенные бортовой вычислитель, блок управления и блок рулевого привода, при этом ЛА при подготовке запуска и запуске соединен с пультом управления, поставленная задача достигается тем, что ЛА снабжен второй аппаратурой спутниковой навигации с приемной антенной, последовательно соединенными блоком сравнения и переключателем, выход которого соединен со входом бортового вычислителя, причем первый выход первой аппаратуры спутниковой навигации и первый выход второй аппаратуры спутниковой навигации подключены соответственно к первому и второму входам блока сравнения, а второй выход первой аппаратуры спутниковой навигации и второй выход второй аппаратуры спутниковой навигации подключены соответственно ко второму и третьему входам переключателя.
Технический результат обеспечивается за счет того, что в способе управления ЛА, оснащенным аппаратурой спутниковой навигации, определение текущих координат ЛА дублируют второй аппаратурой спутниковой навигации, у которой ось ДН приемной антенны развернута относительно оси ДН приемной антенны первой аппаратуры спутниковой навигации на угол, при котором суммарная диаграмма направленности системы двух приемных антенн обеспечивает во всех направлениях коэффициент направленного действия не менее 0,5, при этом по количеству видимых спутников в навигации и геометрическому фактору их положения GDOP, определяемым первой и второй аппаратурами спутниковой навигации, оценивают уровень достоверности навигационной информации и коррекцию траектории полета ЛА производят по текущим координатам, определенным аппаратурой спутниковой навигации с более высоким уровнем достоверности, для этого в системе управления ЛА применяют последовательно соединенные блок сравнения и переключатель, выход которого соединен со входом бортового вычислителя, причем первый выход первой аппаратуры спутниковой навигации и первый выход второй аппаратуры спутниковой навигации подключены соответственно к первому и второму входам блока сравнения, а второй выход первой аппаратуры спутниковой навигации и второй выход второй аппаратуры спутниковой навигации подключены соответственно ко второму и третьему входам переключателя.
Данное техническое решение поясняется графическим материалом.
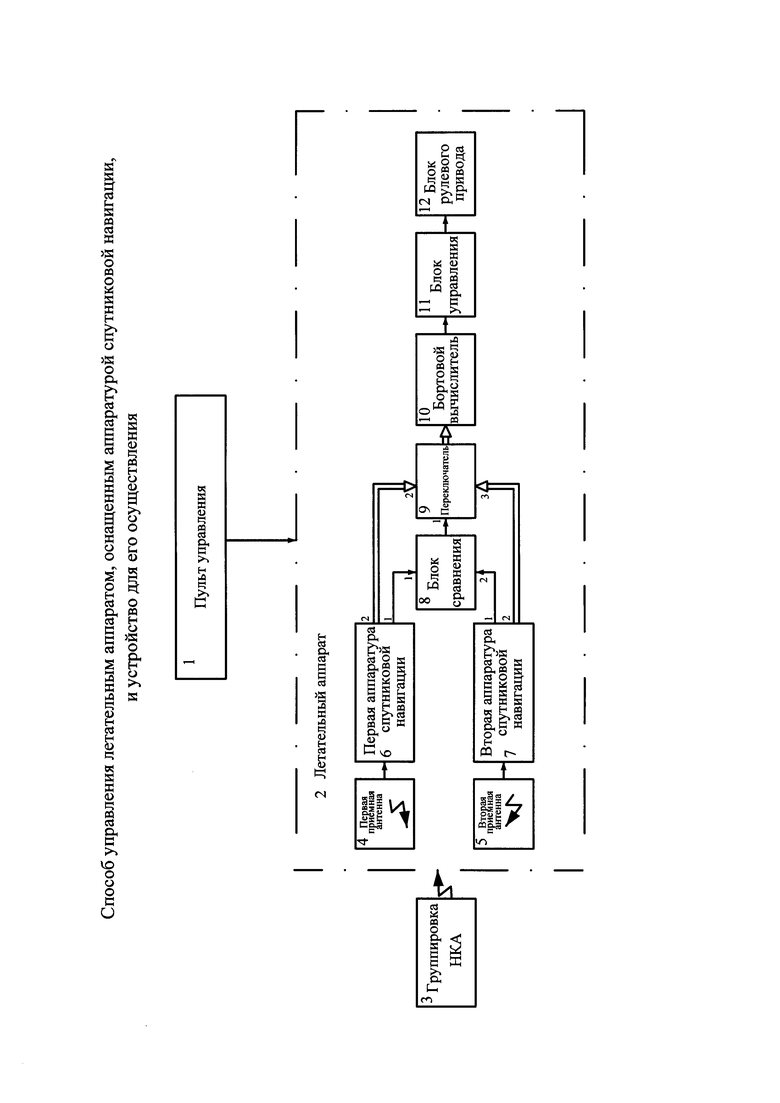
На фиг. схематически приведена блок-схема ЛА, оснащенного системой спутниковой навигации.
Перед запуском ЛА (2) с пульта управления (1) в бортовой вычислитель (10) вводят информацию о координатах цели, программную траекторию полета ЛА, циклограммы подготовки к запуску и запуска. По команде с пульта управления (1) происходит запуск ЛА (2).
В полете на борту ЛА (2), оснащенного первой аппаратурой спутниковой навигации (6) и второй аппаратурой спутниковой навигации (7), на их приемные антенны, соответственно блоки (4) и (5), поступают сигналы с группировки НКА (3). Чтобы исключить прерывания в обработке сигналов бортовой аппаратуры спутниковой навигации и их пропадания, приемные антенны (4) и (5) установлены так, что ось ДН второй приемной антенны (5) развернута относительно оси ДН первой приемной антенны (4) на угол βРАЗВ. Значение βРАЗВ зависит от ширины ДН приемных антенн и может быть равно, например, максимальному углу изменения траекторного угла в полете. Этим обеспечивают коэффициент направленного действия суммарной ДН системы двух приемных антенн во всех направлениях не менее 0,5.
Навигационная информация с группировки НКА (3) через приемные антенны (4) и (5) поступает соответственно в первую аппаратуру спутниковой навигации (6) и вторую аппаратуру спутниковой навигации (7). В каждой из них производится предварительная обработка и выделение координат ЛА, а также формируются сигналы количества спутников навигации, наблюдаемых данной аппаратурой спутниковой навигации, и геометрический фактор их положения GDOP.
Т.к. ЛА оснащен двумя аппаратурами спутниковой навигации, у которых оси ДН развернуты на угол βРАЗВ, а траектория полета ЛА имеет переменную крутизну, на входах блоков (6) и (7) могут присутствовать сигналы разных амплитуд. В этом случае уровень достоверности выходной информации первой аппаратуры спутниковой навигации (6) и второй аппаратуры спутниковой навигации (7) также различны. Для управления ЛА необходимо использовать его текущие координаты, определенные аппаратурой спутниковой навигации с более высоким уровнем достоверности.
С первого выхода первой аппаратуры спутниковой навигации (6) и первого выхода второй аппаратуры спутниковой навигации (7) соответственно на первый и второй входы блока сравнения (8) поступают сигналы количества видимых спутников в навигации N и геометрический фактор их положения GDOP, характеризующие уровень достоверности навигационной информации. В блоке (8) поступившие параметры сравниваются и результат определяется следующим образом. Уровень достоверности навигационной информации выше у аппаратуры с большим значением N. При равенстве данного параметра у обоих аппаратур спутниковой навигации уровень достоверности выше у аппаратуры с меньшим значением GDOP.
Выходной сигнал блока сравнения (8), показывающий, у какого из блоков (6) или (7) выше уровень достоверности навигационной информации, поступает на первый, управляющий вход переключателя (9), на второй и третий входы которого соответственно с первой аппаратуры спутниковой навигации (6) и второй аппаратуры спутниковой навигации (7) поступает навигационная информация, содержащая в том числе текущие координаты ЛА. Переключатель (9) подключает к бортовому вычислителю (10) навигационную информацию с более высоким уровнем достоверности, лучшего качества.
В случае отсутствия сигнала на одной из приемных антенн (4), (5) вследствие крутизны траектории полета и разворота продольной оси ЛА или отказа одной из аппаратур спутниковой навигации (6), (7) в бортовой вычислитель (10) поступает навигационная информация, формируемая дублирующей, т.е. второй аппаратурой спутниковой навигации с подключенной к ней приемной антенной. Тем самым обеспечивается бесперебойная связь бортовой аппаратуры спутниковой навигации с группировкой НКА на всей траектории полета и за счет этого повышается надежность и устойчивость системы управления ЛА.
В бортовом вычислителе (10) текущие координаты ЛА сравниваются с координатами программной траектории полета и рассчитывается рассогласование по координатам, которое приходит в блок управления (11). Для коррекции траектории блок (11) формирует команды управления, поступающие на вход блока рулевого привода (БРП) (12), колебания рулей которого согласно командам управления приводят к смене параметров траектории полета ЛА.
Пульт управления (1) может быть выполнен, например, как в аналоге /2/ или в прототипе /3/. В качестве первой и второй аппаратуры спутниковой навигации с приемной антенной может быть применен, например, приемник навигационной информации вместе с приемной антенной прототипа /3/, или, например, приемник системы глобального позиционирования, подключенный к антенне, используемый в зенитной ракете, патент РФ №2484418, публикация 10.06.2013, кл. МПК F42В 15/00 /4/. Бортовой вычислитель (10), блок управления (11) и блок рулевых приводов (12) могут быть выполнены, например, как в прототипе /3/ соответственно бортовой вычислитель, система управления и блок рулевых приводов или, например, как соответственно блок электроники, блок управления с аэродинамическими рулями аналога 121. Переключатель (9) может быть выполнен на элементах МС К176КТ1. Блок сравнения (10) может быть выполнен, например, на однокристальной микроЭВМ 1830 ВЕ51.
Таким образом, использование предлагаемых способа управления летательным аппаратом, оснащенным аппаратурой спутниковой навигации, и устройства для его осуществления обеспечивает бесперебойную связь бортовой аппаратуры спутниковой навигации с группировкой НКА на всей траектории полета, исключает потерю управления, повышает надежность и вероятность безотказной работы системы управления ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТЕЛЕМЕТРИЧЕСКОЙ СИСТЕМОЙ РЕГИСТРАЦИИ ОСНОВНЫХ ПАРАМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2550870C1 |
| СПОСОБ ПОСТРОЕНИЯ ФУНКЦИОНАЛЬНОГО ДОПОЛНЕНИЯ ОРБИТАЛЬНОГО БАЗИРОВАНИЯ К ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЕ | 2008 |
|
RU2367910C1 |
| БАЛЛИСТИЧЕСКАЯ РАКЕТА | 2017 |
|
RU2685591C1 |
| СПОСОБ ИСПЫТАНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТЕЛЕМЕТРИЧЕСКОЙ СИСТЕМОЙ РЕГИСТРАЦИИ ОСНОВНЫХ ПАРАМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2560170C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| Способ навигационного контроля орбит выведения космических аппаратов и система для его реализации | 2021 |
|
RU2759173C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2013 |
|
RU2538509C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛУ РАДИОНАВИГАЦИОННОГО ОРИЕНТИРА | 2008 |
|
RU2367909C1 |
| Способ помехозащищенного приема сигналов систем спутниковой связи | 2020 |
|
RU2738409C1 |
Изобретение относится к области управления, в частности управляемому вооружению, может найти применение в системах управления летательных аппаратов (ЛА), снарядов и ракет, у которых траекторию полета на начальном и среднем участках корректируют по данным приемника сигналов с навигационных космических аппаратов (НКА). Технический результат – повышение надежности связи ЛА с группировкой НКА на всей траектории полета, обеспечивая повышение устойчивости системы наведения ЛА. Для этого определение текущих координат ЛА дублируют второй аппаратурой спутниковой навигации, у которой ось ДН приемной антенны развернута относительно оси ДН приемной антенны первой аппаратуры спутниковой навигации на угол, при котором суммарная диаграмма направленности системы двух приемных антенн обеспечивает во всех направлениях коэффициент направленного действия не менее 0,5, при этом по количеству видимых спутников в навигации и геометрическому фактору их положения (GDOP), определяемым первой и второй аппаратурами спутниковой навигации, оценивают уровень достоверности навигационной информации, а коррекцию траектории полета ЛА производят по текущим координатам, определенным аппаратурой спутниковой навигации с более высоким уровнем достоверности. При этом в системе управления ЛА поставленная задача достигается тем, что ЛА снабжен второй аппаратурой спутниковой навигации с приемной антенной, последовательно соединенными блоком сравнения и переключателем, выход которого соединен со входом бортового вычислителя, причем первый выход первой аппаратуры спутниковой навигации и первый выход второй аппаратуры спутниковой навигации подключены соответственно к первому и второму входам блока сравнения, а второй выход первой аппаратуры спутниковой навигации и второй выход второй аппаратуры спутниковой навигации подключены соответственно ко второму и третьему входам переключателя. 2 н.п. ф-лы, 1 ил.
1. Способ управления летательным аппаратом (ЛА), оснащенным аппаратурой спутниковой навигации, включающий задание координат цели, запуск ЛА, определение текущих координат ЛА в процессе полета с помощью системы спутниковой навигации, формирование сигнала управления и управление ЛА, коррекцию траектории полета ЛА, отличающийся тем, что определение текущих координат ЛА дублируют второй аппаратурой спутниковой навигации, у которой ось диаграммы направленности (ДН) приемной антенны развернута относительно оси ДН приемной антенны первой аппаратуры спутниковой навигации на угол, при котором суммарная диаграмма направленности системы двух приемных антенн обеспечивает во всех направлениях коэффициент направленного действия не менее 0,5, при этом по количеству видимых спутников в навигации и геометрическому фактору их положения (GDOP), определяемым первой и второй аппаратурами спутниковой навигации, оценивают уровень достоверности навигационной информации, а коррекцию траектории полета ЛА производят по текущим координатам, определенным аппаратурой спутниковой навигации с более высоким уровнем достоверности.
2. Система управления ЛА, оснащенного аппаратурой спутниковой навигации с приемной антенной, обеспечивающей поступление информации с группировки навигационных космических аппаратов (НКА), содержащая пульт управления и последовательно соединенные бортовой вычислитель, блок управления и блок рулевого привода, при этом ЛА при подготовке запуска и запуске соединен с пультом управления, отличающаяся тем, что ЛА снабжен второй аппаратурой спутниковой навигации с приемной антенной, последовательно соединенными блоком сравнения и переключателем, выход которого соединен со входом бортового вычислителя, причем первый выход первой аппаратуры спутниковой навигации и первый выход второй аппаратуры спутниковой навигации подключены соответственно к первому и второму входам блока сравнения, а второй выход первой аппаратуры спутниковой навигации и второй выход второй аппаратуры спутниковой навигации подключены соответственно ко второму и третьему входам переключателя.
| Складная рейсшина | 1948 |
|
SU74890A1 |
| УПРАВЛЯЕМЫЙ АРТИЛЛЕРИЙСКИЙ СНАРЯД | 2013 |
|
RU2527609C1 |
| US 5240207 A1, 31.08.1993 | |||
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕНАСТРОЙКОЙ КООРДИНАТ | 1995 |
|
RU2145725C1 |
| DE 3200004 A1, 14.07.1983. | |||

