Изобретение относится к электротехнике и может быть использовано в автономных системах электроснабжения космических аппаратов, а также в других приборах, требующих высокой надежности. Техническим результатом является повышение надежности и снижение массы системы управления космического аппарата.
Известна 4-канальная отказоустойчивая система бортового комплекса управления (СБКУ) повышенной живучести для космических применений (патент РФ 2449352), содержащая 4 вычислительных комплекса (БЦВС), блок управления и контроля (БУК), 5 блоков управления (БУ), мажоритарные элементы (МЭ), а также несколько подсистем, обеспечивающих контроль и реконфигурацию системы.
СБКУ обеспечивает повышенную живучесть и работу системы при возникновении двух отказов в системе.
Недостатком известной системы является большое количество подсистем, и, как следствие, очень высокая масса и стоимость, что резко снижает ценность достижения требуемой надежности в космической аппаратуре.
Наиболее близкой к предлагаемому изобретению является система управления по схеме мажоритарного резервирования БЦВС бортового комплекса управления (БКУ) с адаптивным мажоритарным элементом (МО) по схеме, приведенной на рисунках 3 и 4 статьи (Л.В. Савкин, Аппаратная реализация логики «один из трех» в схемах мажоритарного резервирования бортовых цифровых вычислительных систем космических аппаратов. «Промышленные АСУ и контроллеры, 2016, №3»), принятой в качестве прототипа.
БКУ содержит три вычислительных комплекса (ВК), мажоритарные элементы (МЭ) и формирователь команд реконфигурации (ФКР), при этом выходы В К подключены к мажоритарным элементам, выходы которых являются входами управления силовых модулей, а входы и выходы ФКР соединены с ВК и МЭ. ФКР в свою очередь включает реконфигурируемые измерительные каналы (РИК), реконфигурируемые дублирующие поля (РДП), реконфигурируемые тестовые каналы (РТК), модули памяти с конфигурационными наборами РИК, РДП, РТК, коммутаторы, базу данных классификатора…
БКУ также обеспечивает работоспособность при двух отказах системы при использовании трех ВК. К недостатку системы следует отнести, как и у аналога очень большое количество сопутствующих подсистем, обеспечивающих реконфигурацию БКУ, а следовательно, сложность разработки и отладки, высокую стоимость и массу БКУ. При этом, масса, стоимость и количество элементов ПКИ не только соизмеримо с аналогичными параметрами ВК, но зачастую и превышает их.
Задачей предлагаемого технического решения является существенное снижение массы и стоимости изделия, упрощение системы, с обеспечением работоспособности при двух отказах, а также снижение сроков разработки аппаратного и программного обеспечения.
Поставленная задача решается тем, что система управления приборами космического аппарата (КА), включающая три вычислительных комплекса (ВК), формирователь команд реконфигурации (ФКР), мажоритарные элементы (МЭ), выходы которых предназначены для подключения к управляющим входам объекта управления, выходной контрольный порт каждого ВК соединен с соответствующим входом ФКР, причем входы ВК являются входами системы управления, дополнительно включает три регистра с Z-состоянием, а между каждыми двумя входами каждого МЭ установлен резистор, причем одноименные информационные входы регистров с Z-состоянием соединены с соответствующими одноименными выходными портами ВК, а их выходы с входами МЭ, при этом значения сопротивлений резисторов на порядок больше выходного сопротивления регистров с Z-состоянием и на порядок меньше входного сопротивления МЭ.
Предусмотрено, что ФКР выполнен в виде перезапускаемого одновибратора с возможностью самотестирования и выдачей по выходному контрольному порту импульсов типа «меандр», при этом
TPQM/TOB=(1,3-1,5),
где
TPQM - период импульсов ВК типа «меандр»,
ТОВ - период импульса одновибратора ФКР, выходы которого подключены к Z-входам регистров.
Предусмотрено также, что выводы питания ФКР, регистров и каждого ВК предназначены для подключения к независимому источнику питания.
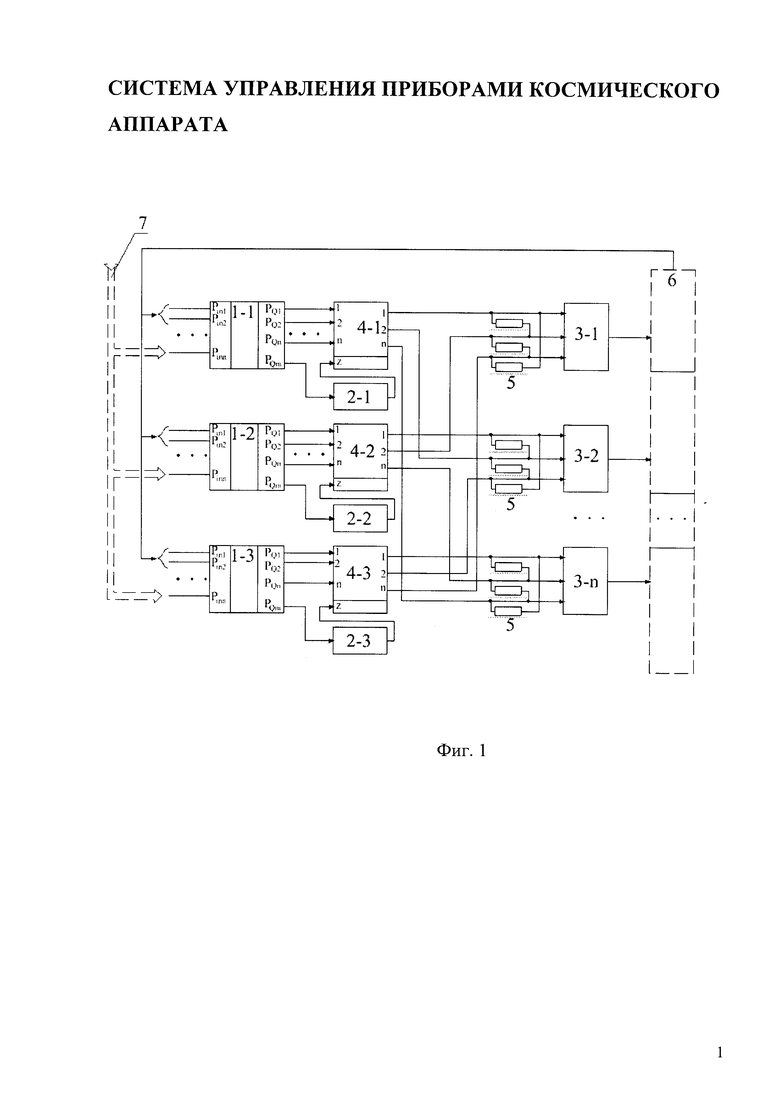
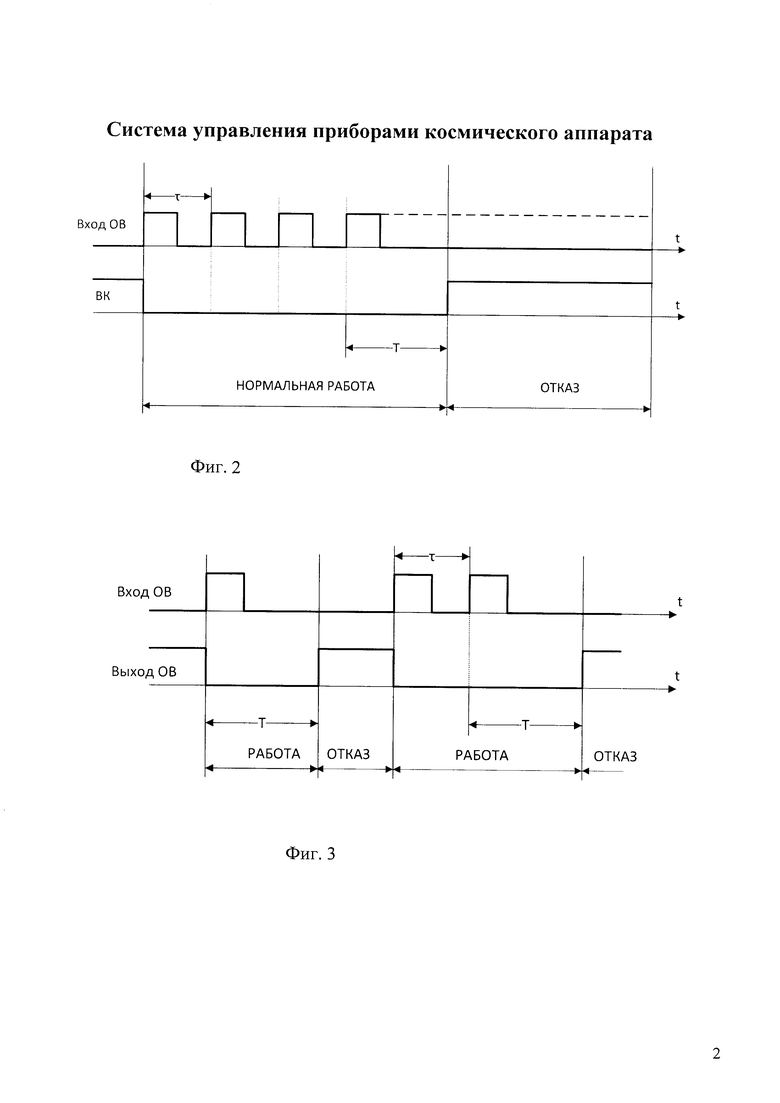
Работа системы управления поясняется чертежами, где на фиг. 1 приведена структурная схема системы управления, на фиг. 2 - диаграмма работы одновибратора ОВ при нормальной работе и отказе вычислительного комплекса ВК, а на фиг. 3 - диаграмма работы одновибратора ОВ при отказе и восстановлении вычислительного комплекса ВК.
На фигурах представлены:
1-1, 1-2, 1-3 - вычислительные комплексы, ВК;
2-1, 2-2, 2-3 - формирователь команд реконфигурации, ФКР, выполненные в виде одновибраторов, работающих в режиме перезапуска;
3-1, 3-2, … 3-n - мажоритарные элементы в количестве, соответствующем количеству входов управления силовыми модулями объекта управления;
4-1, 4-2, 4-3 - регистры с Z-состоянием;
5 - резисторы, соединяющие входы мажоритарных элементов МЭ;
6 - объект управления с управляемыми силовыми модулями (СМ),
7 - мультиплексный канал обмена (МКО) информацией КА.
Система управления функционирует следующим образом.
Вычислительные комплексы (1-1, 1-2, 1-3), выполненные на основе микроконтроллеров (например, 1986 ВЕ1), получают по МКО 7 командную информацию, а от объекта управления 6 - телеметрическую информацию о состоянии системы. При отсутствии отказов в системе, определяемых анализом сигналов на входах Pin1…Pin_n ВК (1-1, 1-2, 1-3), последние выдают по выходным портам (Pq1….Pqn) требуемые сигналы управления для объекта управления 6 и сигнал «меандр» по контрольному выходному порту (Pqm).
При поступлении сигнала «меандр» на вход одновибратора (2-1, 2-2, 2-3) ФКР, последний в соответствии с рисунком на фиг. 2 вырабатывает на выходе непрерывно восстанавливаемый сигнал «0», который подается на Z-вход регистров (4-1, 4-2, 4-3), в соответствии с которым регистры (4-1, 4-2, 4-3) на выходе повторяют сигналы входов и передают на входах МЭ (3-1, 3-2, 3-n), «правильные сигналы» ВК (1-1, 1-2, 1-3).
Поскольку значения сопротивлений 5 существенно выше выходных сопротивлений регистров (4-1, 4-2, 4-3) установка резисторов 5 никак не влияет на работу МЭ (3-1, 3-2, 3-n), которые работают, как им и положено в режиме мажоритара путем выбора двух одинаковых сигналов из трех.
При возникновении отказа одного из ВК (1-1, 1-2, 1-3), одновибратор (2-1, 2-2, 2-3) ФКР переходит в состояние «1», соответствующий регистр (4-1, 4-2, 4-3) переходит в состояние «Z», а соответствующий вход МЭ (3-1, 3-2, 3-n), благодаря сопротивлениям 5 устанавливается в состояние одинаковое с двумя оставшимися входами, обеспечивая безотказную работу системы управления при одном отказе.
Указанная работа МЭ (3-1, 3-2, 3-n 3) обеспечивается при значении сопротивлений резисторов 5 на порядок меньше входного сопротивления МЭ (3-1, 3-2, 3-n), например, типа 1564ЛП23.
Временная диаграмма изменения сигналов на входе и выходе одновибратора (2-1, 2-2, 2-3) ФКР приведена на фиг. 2, из которой видно, что вне зависимости от конкретного состояния на выходе ВК (1-1, 1-2, 1-3),, выходные порты регистров (4-1, 4-2, 4-3) переходят в Z-состояние, отключая отказавшие выводы ВК (1-1, 1-2, 1-3), от выходов системы управления.
При возникновении отказа одновременно в двух ВК (1-1, 1-2, 1-3) уже два одновибратора (2-1, 2-2, 2-3) ФКР, переходят в состояние «1», и два соответствующих регистра (4-1, 4-2, 4-3) переходят в состояние «Z», а два соответствующих входа МЭ (3-1, 3-2, 3-n) устанавливаются в состояние одинаковое с оставшимся (правильным) входом, обеспечивая безотказную работу системы управления при двух отказах. При этом, в соответствии с фиг. 3 видно, что при восстановлении работоспособности отказавшего ВК, выводы последней также восстанавливают работоспособность СУ.
Технический эффект изобретения заключается в упрощении системы реконфигурации, обычно соизмеримой с микроконтроллерными вычислительными комплексами, до трех регистров, трех одновибраторов и резисторов на входах МЭ.
Таким образом, разработанное устройство обеспечивает:
- существенное снижение массы и стоимости системы управления при обеспечении высокой надежности и обеспечении безотказной работы при двух отказах;
- упрощение устройства и уменьшение сроков разработки аппаратного и программного обеспечения;
- возможность использования ПКИ только производства РФ (микроконтроллеры серии 1986, микросхемы серий 1564, 1594), что необходимо при создании продукции спецназначения;
- возможность использования системы управления в режиме холодного резерва одного микроконтроллерного вычислительного комплекса, что повышает ресурс системы и позволяет рассасывать накопленную дозу радиации путем ротации ВК, находящихся в холодном резерве.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ 4-КАНАЛЬНОЙ ОТКАЗОУСТОЙЧИВОЙ СИСТЕМЫ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ ПОВЫШЕННОЙ ЖИВУЧЕСТИ И ЭФФЕКТИВНОГО ЭНЕРГОПОТРЕБЛЕНИЯ И ЕГО РЕАЛИЗАЦИЯ ДЛЯ КОСМИЧЕСКИХ ПРИМЕНЕНИЙ | 2011 |
|
RU2449352C1 |
| СПОСОБ ЗАЩИТЫ ИНТЕГРАЛЬНЫХ МИКРОСХЕМ ПРИ ПОПАДАНИИ В НИХ ТЯЖЕЛЫХ ЗАРЯЖЕННЫХ ЧАСТИЦ | 2011 |
|
RU2480898C2 |
| СПОСОБ ФОРМИРОВАНИЯ ОТКАЗОУСТОЙЧИВОЙ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ И ОТКАЗОУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2439674C1 |
| Способ динамической реконфигурации вычислительных комплексов модульной архитектуры | 2018 |
|
RU2694008C1 |
| МОДУЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2011 |
|
RU2474868C1 |
| РЕЗЕРВИРОВАННЫЙ ИСТОЧНИК ТОКА | 2013 |
|
RU2512890C1 |
| Устройство защиты программируемых микроконтроллеров от тиристорного эффекта | 2020 |
|
RU2749017C1 |
| Резервированная вычислительная система | 1989 |
|
SU1624470A1 |
| НЕЙРОВЫЧИСЛИТЕЛЬ | 2013 |
|
RU2553098C2 |
| Резервированное запоминающее устройство | 1982 |
|
SU1034208A1 |
Изобретение относится к электротехнике и может быть использовано в автономных системах электроснабжения космических аппаратов, а также в других приборах, требующих высокой надежности. Техническим результатом является повышение надежности и снижение массы космического аппарата. Для этого предложена система управления приборами космического аппарата, включающая три вычислительных комплекса (ВК), формирователь команд реконфигурации (ФКР), мажоритарные элементы (МЭ, дополнительно содержит три регистра с Z-состоянием, а между каждыми двумя входами каждого МЭ установлен резистор МЭ. ФКР выполнен в виде перезапускаемого одновибратора, а выводы питания ФКР, регистров и каждого ВК предназначены для подключения к независимому источнику питания. 2 з.п. ф-лы, 3 ил.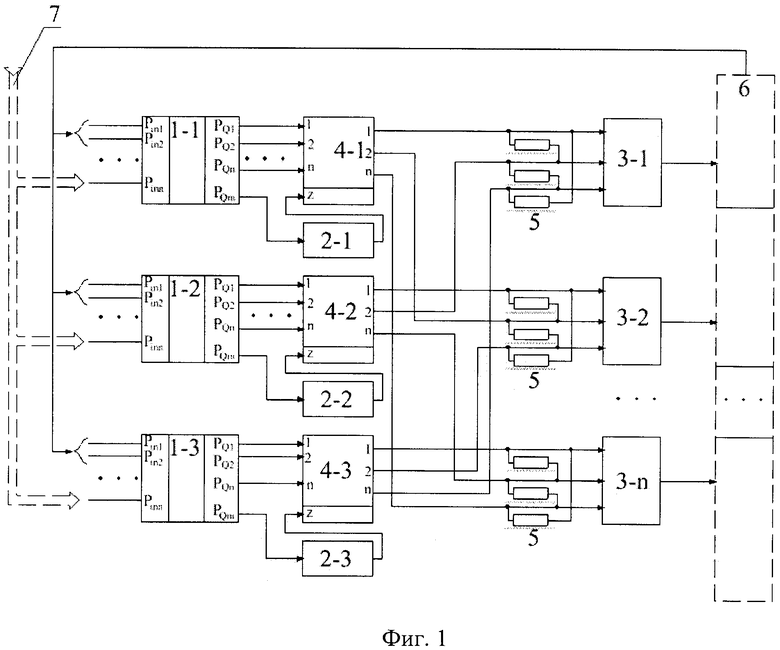
1. Система управления приборами космического аппарата, включающая три вычислительных комплекса (ВК), формирователь команд реконфигурации (ФКР), мажоритарные элементы (МЭ), выходы которых предназначены для подключения к управляющим входам объекта управления, выходной контрольный порт каждого ВК соединен с соответствующим входом ФКР, причем входы ВК являются входами системы управления, отличающаяся тем, что она дополнительно включает три регистра с Z-состоянием, между каждыми двумя входами каждого МЭ установлен резистор, причем одноименные информационные входы регистров с Z-состоянием соединены с соответствующими одноименными выходными портами ВК, а их выходы с входами МЭ, при этом выход формирователя команд реконфигурации связан с Z-входом соответствующего регистра с Z-состоянием, а значения сопротивлений резисторов на порядок больше выходного сопротивления регистров с Z-состоянием и на порядок меньше входного сопротивления МЭ.
2. Система по п. 1, отличающаяся тем, что ФКР выполнен в виде перезапускаемого одновибратора с возможностью самотестирования и выдачей по выходному контрольному порту импульсов типа «меандр», при этом
TPQM/TOB=(1,3-1,5),
где
TPQM - период импульсов ВК типа «меандр»,
TOB - период импульса одновибратора ФКР, выходы которого подключены к Z-входам регистров.
3. Система по п. 1, отличающаяся тем, что выводы питания ФКР, регистров и каждого ВК предназначены для подключения к независимому источнику питания.
| Л.В.САВКИН, Аппаратная реализация логики "один из трех" в схемах адаптивного мажоритарного резервирования бортовых цифровых вычислительных систем космических аппаратов, Промышленные АСУ и контроллеры, 2016, N 3, стр | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2560204C2 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| US 7620883 B1, 17.11.2009. | |||

