Медицинский робот
Изобретение относится к медицинской робототехнике и может быть использовано при доставке лекарств в заданную точку организма, точечном лечении больных тканей, клеток, уничтожении раковых клеток, паразитов, бактерий и вирусов.
Одним из самых перспективных направлений современной медицинской робототехники является разработка роботов малых размеров (от нескольких миллиметров и менее), обладающих функциями движения, обработки, передачи информации, исполнения программ и предназначенных для проникновения в организм с целью осуществления оздоровительных работ.
Некоторые виды нанороботов представляют собой роботов, способных точно взаимодействовать с наноразмерными объектами или манипулировать объектами, в частности, размером менее 1 мкм.
Известен спиральный плавающий микроробот, перемещающийся посредством искусственных свитых в спираль плоских лент, связанных с магнитной головкой, управляемой внешним магнитным полем. Длина лент составляет от 25 до 75 мкм, толщина - 27-42 нм, ширина - менее 2 мкм, а диаметр спирали составляет около 3 мкм (Li Zhang, Jake J. Abbott, Lixin Dong, Bradley E. Kratochvil, Dominik Bell at al. Artificial bacterial flagella: Fabrication and magnetic control. Applied Physics Letters, 94, 064107 (2009)).
Единственный способ управления движением этого устройства в организме заключается в создании внешних электромагнитных полей. Это сильно снижает точность его позиционирования и, соответственно, затрудняет точечное лечение. К недостаткам также можно отнести высокую сложность управления при помощи средств визуализации его положения.
Известен эндовазальный миниробот, предназначенный для перемещения диагностических, хирургических и терапевтических технических средств внутри трубчатых органов и включающий средство перемещения, обеспечивающее перистальтический принцип движения и представляющее собой движитель, выполненный в виде раздельных транспортных модулей, каждый из которых установлен с возможностью соединения с другими модулями, и разъема, по меньшей мере, один соединенный с ними измерительный модуль, на котором размещены средства контроля, по меньшей мере, один соединенный с ними воздействующий модуль, на котором установлены средства воздействия, причем транспортные модули представляют собой тонкостенные конструкции, содержащие оболочечные и упругие деформируемые элементы (RU 2218191 С2, А61М 29/00, 10.12.2003).
Известно устройство, предназначенное для перемещения в полости трубчатых органов, содержащее механизм передвижения, средства захвата и перемещения доставляемого материала (инструмента), расширяющуюся часть, выполненную с возможностью плотного прилегания к стенкам трубчатого органа с целью фиксации устройства вблизи цели (места лечения), и схему управления, частично установленную непосредственно на устройстве и обеспечивающую дистанционный контроль данного устройства (US 7998060 В2, A61B 1/00, 16.08.2011).
Наиболее близким аналогом предложенного изобретения является медицинский микроробот, содержащий корпус, внутри которого последовательно по ходу движения робота расположены электрически связанные между собой блок питания, блок управления и средство передвижения в виде гребного механизма. В конструкцию робота введены установленный перед блоком питания блок получения и передачи изображения (анализирующее устройство), электрически связанный с блоками питания и управления, установленный за блоком питания инструмент для лечения в виде контейнера для транспортировки лекарственных веществ с управляемой заслонкой и установленный за гребным механизмом винтовой или жгутиковый движитель с пьезоэлектрическим двигателем, электрически соединенным с блоками управления и питания, а корпус выполнен в виде гибкого чехла, надетого на систему трех соединенных между собой со сдвигом в 120° в плоскости поперечного сечения триподных механизмов, каждый из которых содержит последовательно соединенные триподы, при этом верхняя платформа одного трипода является нижней платформой последующего, а платформы выполнены в виде образующих треугольник штанг, состоящих из двух частей, между которыми расположены актуаторы с линейными электроприводами, электрически связанными с блоками управления и питания; гребные механизмы, установленные в узлах крепления штанг платформ, содержат гибкие жгутики, связанные с пьезоэлектрическими поворотными электроприводами, электрически связанными с блоками управления и питания (RU 2469752 С1, А61М 37/00, 20.12.2012).
Общим недостатком всех описанных медицинских роботов является их конструктивная сложность и отсутствие возможности автономной работы - они производят перемещение и лечебные операции при помощи дистанционных систем управления, которые на данный момент не могут обеспечить большую точность на микро- и тем более на наноуровне. При внезапном отказе системы управления определить местоположение и извлечь роботов из организма довольно затруднительно в виду их малых размеров, и в то же время обеспечить высокую надежность сложной системы управления роботов столь малых размеров и предназначенных для выполнения операций на микро- и наноуровне в рамках современного промышленного производства тоже очень сложно.
Задачей предложенного изобретения является разработка высокоточного медицинского наноробота, предназначенного для перемещения внутри живого организма и проведения лечебных операций, с упрощенной конструкцией и способного работать в автономном режиме.
Техническим результатом предложенного изобретения является повышение точности работы, расширение функциональности и упрощение конструктивного исполнения медицинского робота.
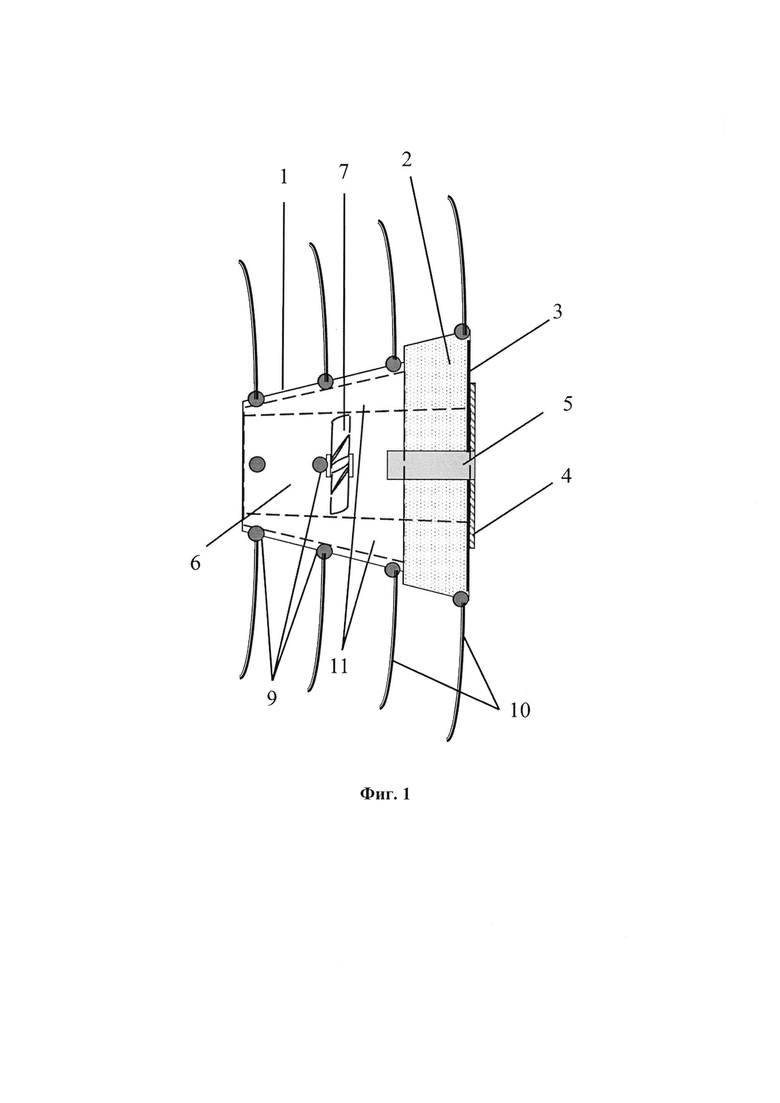
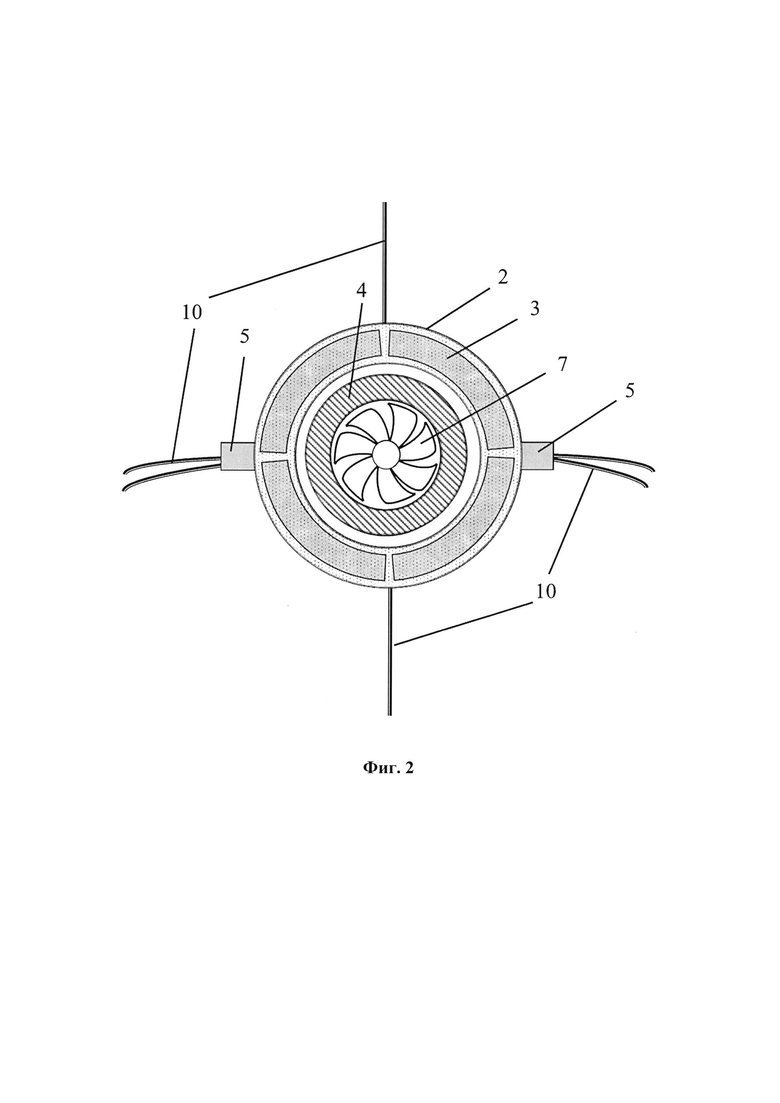
Технический результат достигается за счет того, что предложен медицинский робот, содержащий корпус 1, размещенные в нем по меньшей мере одно средство передвижения 7 и/или 9 с электроприводом(-ами), анализирующее устройство и по меньшей мере один инструмент 5 с электроприводом, при этом анализирующее устройство выполнено в виде химического сенсора 2 и расположено на фронтальной части корпуса 1, на которой также расположен пьезоэлектрический элемент 4, электропривод(-ы) средств(-а) передвижения 7 и/или 9 электрически соединен(-ы) с химическим сенсором 2, электропривод(-ы) инструмента(-ов) 5 электрически соединен(-ы) с пьезоэлектрическим элементом 4, химический сенсор и пьезоэлектрический элемент выполнены в виде кольца, при этом химический сенсор расположен по краю фронтальной части робота.
Робот может содержать средство перемещения в виде насоса 7 с электроприводом, расположенного в сквозной полости 6, проходящей вдоль оси робота, и/или средство перемещения в виде гребного механизма 9 с гибкими жгутиками 10, расположенными на внешней поверхности корпуса 1, и пьезоэлектрическим(-и) поворотным(-и) электроприводом(-ами).
Робот может содержать инструмент(-ы) 5 в виде впрыскивателя(-ей) и/или режущего(-их) инструмента(-ов).
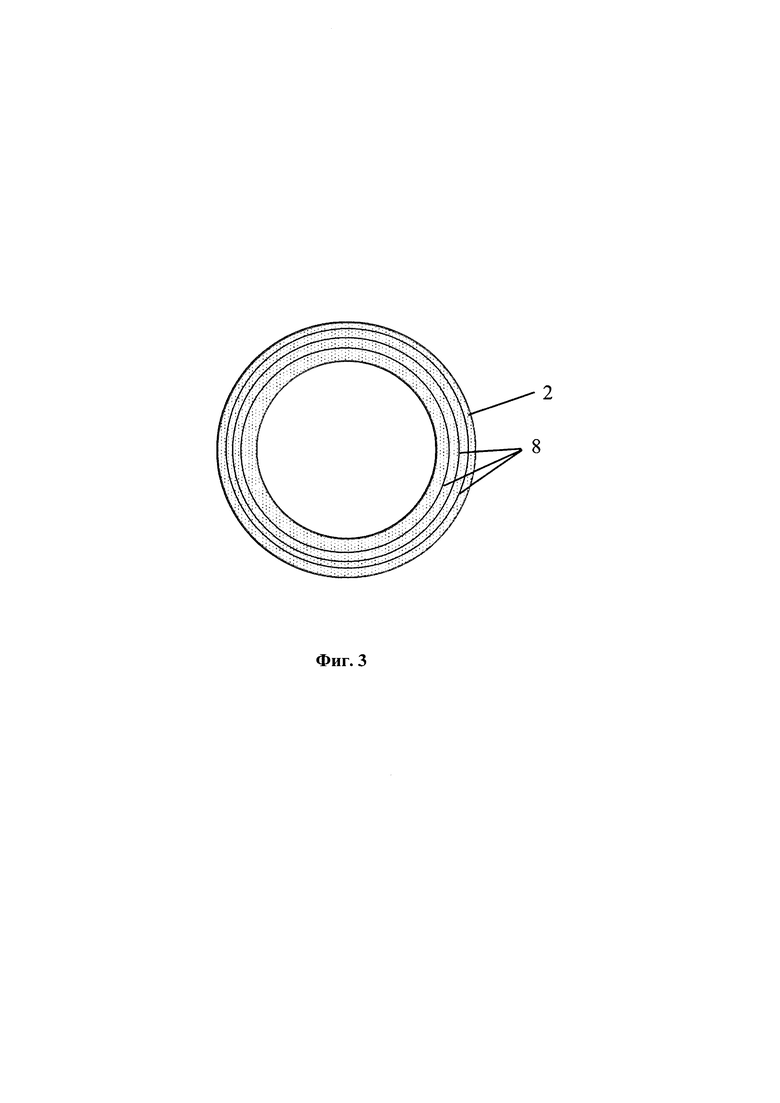
Химический сенсор 2 может быть выполнен в виде электрохимического, представляющего собой гальванический элемент с нанесенной на него полупроницаемой мембраной 3.
Робот может содержать элементы, выполненные из магнитного материала.
В частности, из магнитного материала могут быть выполнены движители средств перемещения.
Робот может дополнительно содержать блок питания 11, электрически соединенный через электронный ключ 15 с электроприводом(-ами) 12 и/или 13 средств(-а) передвижения, а электронный ключ 15 электрически соединен с химическим сенсором 2.
Блок питания 11 может быть также электрически соединен через дополнительный электронный ключ 16 с электроприводом(-ами) 14 инструмента(-ов) 5, а электронный ключ электрически 16 соединен с пьезоэлектрическим элементом 4.
Сущность изобретения поясняется чертежами.
Предложенный робот изображен на фиг. 1 (вид сбоку) и фиг. 2 (вид спереди).
На фиг. 3 изображен кольцевой электрохимический сенсор (без полупронецаемой мембраны).
На фиг. 4 изображена принципиальная схема медицинского робота с включенным в его конструкцию блоком питания.
На чертежах обозначены следующие элементы:
1 - корпус,
2 - химический сенсор,
3 - полупронецаемая мембрана,
4 - пьезоэлектрический элемент (пьезоэлектрический преобразователь),
5 - инструменты с электроприводами,
6 - сквозная полость,
7 - насос,
8 - электроды,
9 - гребной механизм с электроприводом(-ами),
10 - гибкие жгутики,
11 - блок питания,
12 - электропривод насоса,
13 - электропривод гребного механизма,
14 - электропривод инструмента,
15 - электронный ключ в сети с электроприводами средства передвижения,
16 - электронный ключ в сети в электроприводом инструмента (дополнительный).
Поскольку морфологическое изменение живых тканей складывается из морфологических изменений клеток, которые образуют эту ткань, справедливо сказать, что любая болезнь первоначально начинается на клеточном уровне. Первопричиной нарушения нормальной жизнедеятельности организма являются различные формы онкоза клеток, неблагоприятно протекающий апоптоз (индуцированный, апоптоз клеток в стареющем организме), некроз, который может быть вызван, в том числе, изолированным разрушением межклеточного вещества, и другие формы нарушения нормального функционирования клеток. Огромную роль в нарушении деятельности клеток играют паразиты, в частности болезнетворные микроорганизмы - бактерии и вирусы, которые выделяют вредные продукты жизнедеятельности - активные химические вещества, проникающие через мембраны клеток и изменяющие их химический состав.
Таким образом, паразитам и больным клеткам свойственно выделять специфические соединения.
Так, например, раковая клетка выделяет онкобелки и токсические вещества, приводящие к распаду белковых структур. Большинство нездоровых клеток содержит большое количество мочевой кислоты и ее солей, калия, фосфатов и производных молочной кислоты.
При процессах гниения в органах и тканях выделяется аммиак, сероводород, первичные и вторичные амины при неполной минерализации продуктов разложения - трупные яды (например, путресцин и кадаверин), ароматические соединения (например, скатол, индол, которые образуются в результате дезаминирования и декарбоксилирования аминокислоты триптофана). Гниение серосодержащих аминокислот (цистеина, цистина и метионина) приводит к выделению сероводорода, тиолов и диметилсульфоксида.
В данном изобретении направление и скорость движения медицинского робота предлагается задавать с помощью сигнала химического сенсора 2 с полупроницаемой мембраной 3, обеспечивающей селективный перенос соединений вышеописанных видов.
Химические сенсоры представляют собой чувствительные элементы, генерирующие аналитический сигнал, сила которого зависит от концентрации определяемого компонента в анализируемой среде. Неотъемлемой частью химического сенсора является преобразователь химической энергии, биохимического или физического процессов, лежащих в основе определения, в электрический сигнал.
Наиболее конструктивно простыми, портативными и недорогими химическими сенсорами являются электрохимические. Они составляют наиболее разработанную и широко используемую группу среди остальных сенсоров. Чувствительный элемент (трансдьюсер) данного типа сенсоров представляет собой гальванический элемент, в котором два электрода и электролит отделены от анализируемой среды избирательно-проницаемой мембраной. Подобная гальваническая ячейка способна генерировать электрический сигнал без дополнительных преобразователей химической энергии, что позволяет изготовить его более миниатюрным.
Химический сенсор 2 с полупроницаемой мембраной 3, изготовленной с возможностью пропускания того или иного вещества, при протекании в нем (электро-)химической реакции вырабатывает электрический импульс, который поступает на электропривод(-ы) средств(-а) передвижения 7 и/или 9.
Средство передвижения может представлять собой насос 7 с электроприводом, расположенный в сквозной полости 6, проходящей вдоль оси робота, и/или гребной механизм 9 с гибкими жгутиками 10, расположенными на внешней поверхности корпуса, и пьезоэлектрическим поворотным электроприводом, как в прототипе. При этом чем больше сквозь мембрану будет проходить определяемого вещества, тем больший ток станет поступать на электропривод(-ы) средств(-а) передвижения, обеспечивая более быстрое перемещение робота в нужном направлении.
Если робот будет содержать элементы, выполненные из магнитного материала, то определять его местонахождение, отслеживать по магнитному полю, а также контролировать его передвижение до области лечения можно будет с помощью магнитно-резонансного томографа, при этом дальнейшее перемещение робота к месту лечения, требующее большей точности, будет осуществляться в автономном режиме по описанной выше схеме при помощи химического сенсора.
Поскольку нанороботы самостоятельно находят больные ткани и паразитов, если заранее знать расположение последних, то обнаружение вышедших из строя роботов, содержащих элементы, выполненные из магнитного материала, упрощается.
Если из магнитного материала будет изготовлен движитель средства перемещения (лопатки насоса, гибкие жгутики), то указанное средство можно будет приводить в движение с помощью создания внешнего магнитного поля.
Оказавшись в месте организма, где необходимо произвести лечение, изначально робот не ориентирован в нужном направлении. Однако его фронтальная часть начнет поворачиваться в ту сторону, откуда поступает большее количество определяемого вещества, и именно в этом направлении он начнет целенаправленное движение с ускорением за счет того, что чем ближе он будет подходить к цели, тем в окружающей среде будет находиться больше определяемого вещества.
Таким образом, робот с ускорением доберется до живой ткани, требующей лечения, или до паразита, которого необходимо уничтожить. За счет соприкосновения с тканью или паразитом пьезоэлектрический элемент 4 вырабатывает электрический импульс, который передается на электропривод(-ы) инструмента(-ов) 5.
Если инструмент представляет собой впрыскиватель лекарства (или яда для раковых клеток и паразитов), то электропривод 14 открывает перегородку (на чертежах не показана) впрыскивателя, и лекарство (яд) воздействует на ткань (паразита).
Если инструмент выполнен в виде ножа (режущий инструмент), то электропривод обеспечивает его поступательное движение вперед, за счет чего режущий инструмент наносит повреждения паразитам, либо срезает холестериновые бляшки со стенок сосудов.
Чтобы вырабатывать электрические импульсы большей силы, что, в свою очередь, необходимо для более быстрой работы средств(-а) перемещения 7 и/или 9 и инструмента(-ов) 5, необходимо использовать химический сенсор 2 с большей поверхностью соприкосновения с исследуемой средой и также пьезоэлектрический элемент 4 с большей поверхностью. Этого можно достигнуть, если использовать химический сенсор 2 и пьезоэлектрический элемент 4 в виде кольца.
Выполнение химического сенсора в виде кольца, расположенного по краю фронтальной части робота, позволяет быстрее и точнее ориентировать его движение в направлении, соответствующем направлению увеличения концентрации аналита, поскольку данная концентрация станет улавливаться всеми диаметрально противоположными точками фронтальной части робота.
Выполнение пьезоэлектрического элемента в виде кольца обеспечивает своевременное активирование электропривода инструмента, которое происходит при соприкосновении с объектом всей или большей части поверхности пьезоэлектрического элемента. При его выполнении иной формы электродвигатель инструмента может сработать, когда данный элемент достиг объекта, а другие части фронтальной стороны робота и лечащий инструмент не достигли, либо не направлены на объект. В то же время вероятность соприкосновения с объектом пьезоэлектрического элемента повышается в том случае, если он будет повторять форму химического сенсора.
Таким образом, форма химического сенсора и пьезоэлектрического элемента значительно повышают точность работы медицинского робота.
Химический сенсор 2 может представлять собой биосенсор. Электрохимический биосенсор, как правило, включает в себя три электрода: электрод сравнения, рабочий и вспомогательный. На поверхность рабочего электрода наносят биологический материал, который специфически вступает в реакцию с анализируемым веществом. Заряженные продукты реакции создают на рабочем электроде потенциал. Разность потенциалов рабочего электрода и электрода сравнения формирует выходящий сигнал.
Электроды электрохимического сенсора могут быть выполнены в виде кольца (фиг. 3).
В слишком вязких средах работа средств передвижения под действием слабых импульсов химического сенсора может быть значительно затруднена. Для решения этой проблемы в конструкцию робота можно включить блок питания 11, который необходимо электрически соединить через электронный ключ 15 с электроприводом(-ами) 12 и/или 13 средств(-а) передвижения (насоса и гребного механизма), а электронный ключ электрически соединить с химическим сенсором 2.
Также можно усилить работу инструмента(-ов) 5, электрически подсоединив блок питания 11 через электронный ключ 16 к электроприводу 14 каждого инструмента, при этом подсоединив электронный ключ 16 к пьезоэлектрическому элементу 4.
Таким образом, предложенный высокоточный медицинский наноробот способен проводить более точные и надежные операции за счет того, что может в автономном режиме находить, пролечивать больные ткани и клетки, а также уничтожать паразитов и раковые клетки без дистанционных систем управления, которые на данный момент не могут обеспечить большую точность на микро- и тем более на наноуровне. Поскольку в качестве инструмента лечения робот может содержать впрыскиватель лекарства и/или режущий инструмент для уничтожения паразитов, раковых клеток и удаления холестериновых бляшек со стенок сосудов, он обладает расширенной функциональностью. Исключение сложной системы управления и блока получения и передачи изображения, которые содержатся в роботе-прототипе, упрощает конструкцию и обеспечивает возможность изготовления робота с меньшими габаритами.
Освоение новых нанотехнологий, производства наноразмерных мембран, электродов и двигателей в ближайшей перспективе обеспечит возможность изготовления предложенного робота наноразмерным.
| название | год | авторы | номер документа |
|---|---|---|---|
| БИОНИЧЕСКАЯ КОНЕЧНОСТЬ И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2014 |
|
RU2559417C1 |
| МЕДИЦИНСКИЙ МИКРОРОБОТ | 2011 |
|
RU2469752C1 |
| ИСКУССТВЕННЫЙ НЕРВ | 2014 |
|
RU2564558C1 |
| АМФИБИЙНЫЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2015 |
|
RU2577626C1 |
| АВТОБУС (ВАРИАНТЫ) | 2015 |
|
RU2578621C1 |
| СРЕДСТВО ДЛЯ ЛЕЧЕНИЯ НЕЙРОСЕНСОРНОЙ ПОТЕРИ СЛУХА (ВАРИАНТЫ) | 2015 |
|
RU2614487C1 |
| Бионический экзоскелет | 2017 |
|
RU2645804C1 |
| ИСКУССТВЕННАЯ МЫШЦА | 2014 |
|
RU2563815C1 |
| ИСКУССТВЕННАЯ СЕТЧАТКА И БИОНИЧЕСКИЙ ГЛАЗ НА ЕЁ ОСНОВЕ | 2014 |
|
RU2567974C1 |
| БИОПРИНТЕР | 2014 |
|
RU2558290C1 |

Изобретение относится к медицинской робототехнике. Медицинский робот содержит корпус, размещенные в нем по меньшей мере одно средство передвижения с электроприводом(ами), анализирующее устройство и по меньшей мере один инструмент с электроприводом. Анализирующее устройство выполнено в виде химического сенсора и расположено на фронтальной части корпуса, на которой также расположен пьезоэлектрический элемент, электропривод(ы) средств(а) передвижения электрически соединен(ы) с химическим сенсором, электропривод(ы) инструмента(ов) электрически соединен(ы) с пьезоэлектрическим элементом, химический сенсор и пьезоэлектрический элементы выполнены в виде кольца. Химический сенсор расположен по краю фронтальной части робота. Технический результат состоит в повышении надежности и точности, расширении функциональности и упрощении конструктивного исполнения медицинского робота. 7 з.п. ф-лы, 4 ил.
1. Медицинский робот, содержащий корпус, размещенные в нем по меньшей мере одно средство передвижения с электроприводом(ами), анализирующее устройство и по меньшей мере один инструмент с электроприводом, отличающийся тем, что анализирующее устройство выполнено в виде химического сенсора и расположено на фронтальной части корпуса, на которой также расположен пьезоэлектрический элемент, электропривод(ы) средств(а) передвижения электрически соединен(ы) с химическим сенсором, электропривод(ы) инструмента(ов) электрически соединен(ы) с пьезоэлектрическим элементом, химический сенсор и пьезоэлектрический элементы выполнены в виде кольца, при этом химический сенсор расположен по краю фронтальной части робота.
2. Робот по п. 1, отличающийся тем, что он содержит средство перемещения в виде насоса с электроприводом, расположенного в сквозной полости, проходящей вдоль оси робота, и/или средство перемещения в виде гребного механизма с гибкими жгутиками, расположенными на внешней поверхности корпуса, и пьезоэлектрическим(и) поворотным(и) электроприводом(ами).
3. Робот по п. 1, отличающийся тем, что он содержит инструмент(ы) в виде впрыскивателя(ей) и/или режущего(их) инструмента(ов).
4. Робот по п. 1, отличающийся тем, что химический сенсор выполнен в виде электрохимического, представляющего собой гальванический элемент с нанесенной на него полупроницаемой мембраной.
5. Робот по п. 1, отличающийся тем, что он содержит элементы, выполненные из магнитного материала.
6. Робот по п. 5, отличающийся тем, что из магнитного материала выполнен(ы) движитель(и) средств(а) перемещения.
7. Робот по п. 1, отличающийся тем, что он дополнительно содержит блок питания, электрически соединенный через электронный ключ с электроприводом(ами) средств(а) передвижения, а электронный ключ электрически соединен с химическим сенсором.
8. Робот по п. 7, отличающийся тем, что блок питания электрически соединен через дополнительный электронный ключ с электроприводом(ами) инструмента(ов), а электронный ключ электрически соединен с пьезоэлектрическим элементом.
| МЕДИЦИНСКИЙ МИКРОРОБОТ | 2011 |
|
RU2469752C1 |
| US 2017027424 A1, 02.02.2017 | |||
| US 2016320381 A1, 03.11.2016 | |||
| US 7998060 B2, 16.08.2011 | |||
| ЭНДОВАЗАЛЬНЫЙ МИНИ-РОБОТ | 2002 |
|
RU2218191C2 |
| RU 93009723 A1, 10.03.1995 | |||
| ЭНДОВАЗАЛЬНЫЙ МИНИ-РОБОТ | 2002 |
|
RU2218191C2 |

