Изобретение относится к медицинским микророботам и предназначено для транспортировки лекарственных препаратов по венам живого организма.
Известен спиральный плавающий микроробот, содержащий искусственные "хвостики" - свитые в спирали плоские ленточки, связанные с магнитной головкой, управляемой внешним магнитным полем. Длина лент составляет от 25 до 75 микрометров, толщина равна 27-42 нанометрам, ширина - менее 2 микрометров, а диаметр спирали - около 3 мкм. Недостатками этого устройства являются высокая сложность управления, требующая применения специальных средств визуализации положения микроробота в живом организме, низкая точность позиционирования и сильная зависимость от внешних электромагнитных полей (Appl. Phys. Lett. 94, 064107 (2009); Artificial bacterial flagella: Fabrication and magnetic control, Li Zhang 1, Jake J. Abbott 1, 2, Lixin Dong 1, 3, Bradley E. Kratochvill, Dominik Belli, and Bradley J. Nelson 1).
Наиболее близким к заявляемому является устройство внутритрубного миниатюрного робота перемещения, предназначенного для диагностики труб малого диаметра. Робот имеет жесткий корпус, внутри которого последовательно по ходу движения робота расположены электрически связанные между собой блок питания, блок управления и гребной механизм, содержащий электрический привод, шток которого соединен посредством гибкой связи с модулем, содержащим скользящие группы лепестковых упоров (Gradetsky V., Solovtsov V., Kniazkov M., Rizzotto G., Amato P. Modular design of electro-magnetic mechatronic microrobots // Proceedings of the 6-th International Conference CLAWAR 2003, Catania, Italy, 2003. P.651-658).
Маршевый электродвигатель привода осуществляет выдвижение нужной группы лепестков упора, ориентированных под определенным углом к поверхности трубы, что позволяет роботу двигаться в желаемом направлении. Скользящие упоры в данной конструкции позволяют перемещаться со скоростью до 7 см/с в резонансном режиме работы маршевого двигателя и при этом не повреждают стенки трубопровода. При периодическом включении и выключении обмотки соленоида маршевого двигателя происходит втягивание штока, выталкиваемого пружиной. Продвижение робота происходит в том направлении, в котором наклонены лепестки упоров.
Основными недостатками такого устройства являются малая грузоподъемность, так как его тяга определяется анизотропностью трения при движении робота, и малая гибкость конструкции, снижающая его проходимость в сложных профилях окружающей поверхности.
Задачей изобретения является повышение грузоподъемности и гибкости конструкции.
Технический результат от повышения грузоподъемности и гибкости конструкции состоит в повышении эффективности доставки лекарственных препаратов в требуемые трудно доступные участки организма.
Указанная задача решается за счет того, что предлагаемое устройство, как и принятое за прототип, имеет жесткий корпус, внутри которого последовательно по ходу движения робота расположены электрически связанные между собой блок питания, блок управления и гребной механизм.
Однако, в отличие от известного, в предлагаемое устройство введены установленный перед блоком питания блок получения и передачи изображения, электрически связанный с блоками питания и управления, установленный за блоком питания контейнер для транспортировки лекарственных веществ с управляемой заслонкой и установленный за гребным механизмом винтовой, либо жгутиковый движитель с пьезоэлектрическим двигателем, электрически соединенным с блоками управления и питания, а корпус выполнен в виде гибкого чехла, надетого на систему трех соединенных между собой со сдвигом в 120 градусов в плоскости поперечного сечения триподных механизмов, каждый из которых содержит триподы, последовательно соединенные таким образом, что верхняя платформа одного трипода является нижней платформой последующего, при этом платформы выполнены в виде образующих треугольник штанг, состоящих из двух частей, между которыми расположены актуаторы с линейными электроприводами, электрически связанными с блоками управления и питания, а гребные механизмы установлены в узлах крепления штанг платформ и содержат гибкие жгутики, связанные с пьезоэлектрическими поворотными электроприводами, электрически связанными с блоками управления и питания.
Изложенная сущность изобретения поясняется чертежами, где на фиг.1 представлен общий вид устройства, а на фиг.2 изображена схема расположения триподных механизмов.
На чертежах приняты следующие обозначения: гибкий чехол корпуса 1, гибкие жгутики 2 гребного механизма, пьезоэлектрические поворотные электроприводы 3 гребного механизма, блок питания 4, блок управления 5, блок получения и передачи изображения 6, контейнер для транспортировки лекарственных веществ 7 с управляемой заслонкой 8, жгутик 9 движителя с пьезоэлектрическим двигателем 10, триподные механизмы 11 со штангами 12 и актуаторами 13 на линейных электроприводах, штанги 14 платформ триподов 11 с актуаторами 15 на линейных электроприводах.
Работа устройства.
После введения медицинского микроробота в вену (сосуд) включается блок питания 4, затем блок управления 5 и блок получения и передачи изображения 6. Блок получения и передачи изображения 6 передает изображение внутренних стенок сосуда перед роботом оператору и блоку управления 5. Блок управления 5 анализирует полученное изображение и подает сигнал управления на линейные электродвигатели актуаторов 15, изменяющих размер штанг 14 и соответственно толщину робота в зависимости от текущей величины сечения сосуда. Одновременно блок управления 5 подает управляющее напряжение на актуаторы 13 штанг 12 триподов 11, изменяющих положение их платформ и соответственно изгибающих тело робота в соответствии с текущим изгибом внутренних стенок сосуда. Кроме того, блок управления 5 подает управляющее напряжение на пьезоэлектрический двигатель 10, вращающий жгутик 9 для обеспечения продвижения робота вдоль сосуда, и на пьезоэлектрические поворотные приводы 3 гребного механизма, создающего гребные движения жгутиков 2. Благодаря гребным движениям жгутиков 2 обеспечивается большая проходимость робота в трудно доступных участках и, кроме того, гребные движения жгутиков 2 могут создавать эффект чистки внутренней поверхности сосуда. Также улучшение проходимости робота достигается за счет поворотов робота и изменения его толщины. После прибытия робота к месту назначения блок управления 5 подает команду на открытие управляемой заслонки 8 контейнера 7 и происходит выгрузка находящихся в нем лекарственных веществ.
Таким образом, производится доставка лекарственных веществ в трудно доступные места живого организма с высокой эффективностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Медицинский робот | 2017 |
|
RU2653795C1 |
| Колебательный водометный движитель, содержащий рабочий огран по принципу биения хлыста | 2015 |
|
RU2629460C2 |
| ВНУТРИТРУБНЫЙ УПРУГИЙ МИКРОРОБОТ С УПРАВЛЯЕМОЙ ПЬЕЗОАКТЮАТОРОМ ФОРМОЙ | 2018 |
|
RU2690258C1 |
| Гусеничный транспортер | 2023 |
|
RU2798887C1 |
| Шагающий инсектоморфный мобильный микроробот | 2018 |
|
RU2699209C1 |
| Ползающий космический микроробот-инспектор | 2021 |
|
RU2771501C1 |
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
| Робототехнический комплекс и способ его эксплуатации на высотных объектах, относящихся к электроэнергетике и радиосвязи | 2019 |
|
RU2715682C1 |
| Робот-пропольщик с функцией фертигации | 2019 |
|
RU2694588C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ИНОРОДНОГО ТЕЛА ВНУТРИ ПАЦИЕНТА ВНЕШНИМ МАГНИТНЫМ ПОЛЕМ | 2017 |
|
RU2667880C1 |
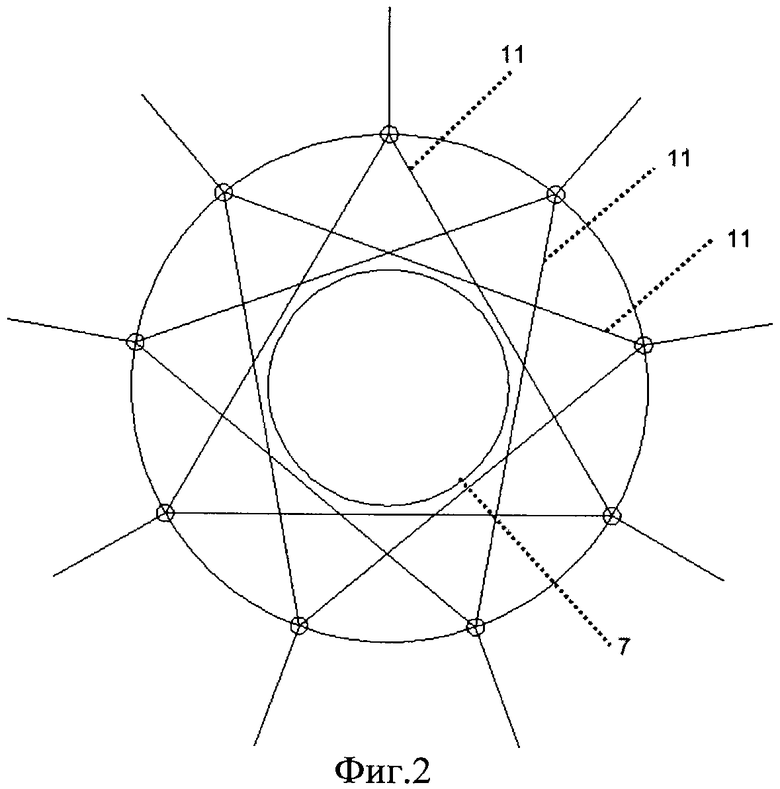
Изобретение относится к медицинским приборам и предназначено для транспортировки лекарственных веществ в трудно доступные места живого организма с высокой эффективностью. Устройство содержит гибкий чехол корпуса 1, гибкие жгутики 2 гребного механизма, пьезоэлектрические поворотные электроприводы 3 гребного механизма, блок питания 4, блок управления 5, блок получения и передачи изображения 6, контейнер для транспортировки лекарственных веществ 7 с управляемой заслонкой 8, жгутик 9 движителя с пьезоэлектрическим двигателем 10, триподные механизмы 11 со штангами 12 и актуаторами 13 на линейных электроприводах, штанги 14 платформ триподов 11 с актуаторами 15 на линейных электроприводах. Технический результат состоит в повышении эффективности доставки лекарственных препаратов в труднодоступные участки организма за счет повышения грузоподъемности и гибкости конструкции. 2 ил.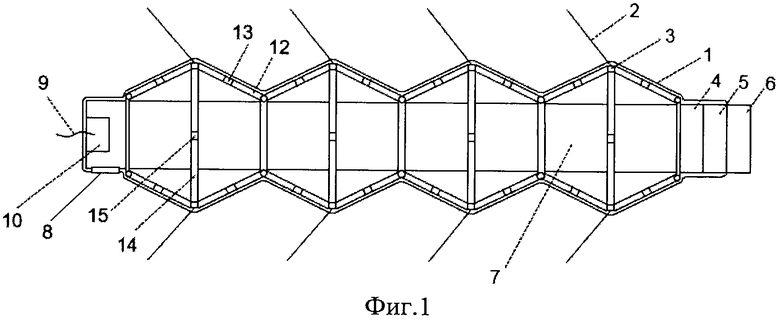
Медицинский микроробот, содержащий корпус, внутри которого последовательно по ходу движения робота расположены электрически связанные между собой блок питания, блок управления и гребной механизм, отличающийся тем, что в него введены установленный перед блоком питания блок получения и передачи изображения, электрически связанный с блоками питания и управления, установленный за блоком питания контейнер для транспортировки лекарственных веществ с управляемой заслонкой и установленный за гребным механизмом винтовой или жгутиковый движитель с пьезоэлектрическим двигателем, электрически соединенным с блоками управления и питания, а корпус выполнен в виде гибкого чехла, надетого на систему трех соединенных между собой со сдвигом в 120° в плоскости поперечного сечения триподных механизмов, каждый из которых содержит последовательно соединенные триподы, при этом верхняя платформа одного трипода является нижней платформой последующего, а платформы выполнены в виде образующих треугольник штанг, состоящих из двух частей, между которыми расположены актуаторы с линейными электроприводами, электрически связанными с блоками управления и питания; гребные механизмы, установленные в узлах крепления штанг платформ, содержат гибкие жгутики, связанные с пьезоэлектрическими поворотными электроприводоми, электрически связанными с блоками управления и питания.
| US 20080103440 A1, 01.05.2008 | |||
| ЭНДОВАЗАЛЬНЫЙ МИНИ-РОБОТ | 2002 |
|
RU2218191C2 |
| Силовой динамометр для пальцев рук | 1950 |
|
SU91832A1 |
| US 20070225634 A1, 27.09.2007 | |||
| Appl | |||
| Phys | |||
| Lett | |||
| Экономайзер | 0 |
|
SU94A1 |
| Abbottl, 2, Lixin Dongl, 3, Bradley E | |||
| Kratochvill, Dominik Belli, and Bradley J | |||
| Nelsoni | |||
| Gradetsky V., Solovtsov | |||

