Изобретение относится к измерительной технике и может быть использовано для определения положения трубопровода в пространстве посредством измерения радиусов изгиба трубопровода, в том числе в горизонтальной и вертикальной плоскостях, при строительстве и эксплуатации трубопроводов.
Известен метод определения положения трубопровода (US 4799391 «Method for surveying fluid transmission pipelines», МПК G01C 9/06, E21B 47/02, приоритет от 18.12.1986), с помощью которого, используя бортовую инерциальную систему, установленную на внутритрубном инспекционном приборе (далее ВИП), измеряют кривизну трубопровода, получая данные (угловые значения, угловые ускорения, угловые скорости и т.д.) при помощи установленных на ВИП ортогонально ориентированных трех акселерометрах и трех гироскопах, причем их оси сориентированы так, что пересекаются с так называемым центром жесткости ВИП, который расположен в центре ВИП, вдоль центральной оси ВИП и совмещен с центральной осью трубопровода.
Известно «Устройство для определения и регистрации геометрических параметров трубопроводов» (патент RU 2102704, МПК G01B 17/02, приоритет от 03.08.1994), техническим результатом которого является обеспечение возможности автоматического вычисления географических координат, направления и величины радиуса кривизны локальных участков и профиля поперечного сечения трубы. Устройство включает в себя герметичный контейнер, который снабжен трехкомпонентным гироскопическим измерителем угловой скорости и трехкомпонентным измерителем кажущегося ускорения, подключенным к информационным входам блока вычисления, и вторым и третьим ультразвуковым измерителям радиальных расстояний, которые аналогичны первому, при этом первые группы их выходов подключены к шине ввода, а первая группа входов - к управляющей шине блока вычислений, при этом ультразвуковые приемопередающие преобразователи одного измерителя радиальных расстояний расположены по окружности в носовой части контейнера, другого измерителя - в средней части контейнера, а третьего - в хвостовой части контейнера, а центр тяжести контейнера смещен к боковой поверхности.
Известна «Система определения координат трассы подземного трубопровода», (патент RU 2197714, МПК G01B 17/00, F17D 5/00, приоритет от 17.09.2001), которая предназначена для определения географических координат точек продольной оси подземного газонефтепровода с помощью бесплатформенной инерциальной системы ориентации и навигации, а также датчика пути и других приборов, устанавливаемых на борту внутритрубного инспектирующего снаряда и на земле. Технический результат данного изобретения обеспечивает возможность исключения нарастания во времени погрешностей определения координат трассы трубопровода. После помещения внутритрубного инспектирующего снаряда в камеру запуска его выдерживают в неподвижном состоянии в течение двух-трех минут для обеспечения начальной выставки системы при обработке данных, а затем пропускают по инспектируемому участку, записывая под управлением бортового процессора в долговременно запоминающее устройство (ДЗУ) текущие значения системного времени и кажущихся ускорений, угловых скоростей, пройденного расстояния, температуры внутри блока инерциальных датчиков, а также сигналов ультразвуковых приемопередающих преобразователей и маркеров. После извлечения снаряда из приемной камеры ДЗУ отсоединяют от бортовой аппаратуры и присоединяют через системную шину к наземной подсистеме, в которой производится начальная выставка системы определения координат трассы подземного трубопровода. При этом внутритрубный инспектирующий снаряд включает в себя герметичный контейнер, эластичные манжеты, жестко закрепленные в носовой и хвостовой частях контейнера, последовательно соединенные датчик пути, установленный на внешней поверхности контейнера, блок вычислений и управления и регистратор, трехкомпонентный гироскопический измеритель угловой скорости и трехкомпонентный акселерометр, размещенные внутри контейнера, три ряда расположенных по окружностям ультразвуковых приемопередающих преобразователей, расположенных попарно и диаметрально противоположно на внешней поверхности по n в каждом ряду в носовой, хвостовой и средней частях контейнера, подключенные к информационным входам блока вычислений и управления.
Известен «Навигационно-топографический внутритрубный инспектирующий снаряд» (патент RU 2321828, МПК G01C 21/12, F17D 5/06, Е21В 47/02, приоритет от 06.03.2007), который предназначен для расширения диапазона рабочих угловых скоростей и уменьшение влияния угловых вибраций, и который состоит из герметичного контейнера, эластичных манжет в передней и задней частях контейнера, содержащем датчики пути, приборные узлы, закрепленные внутри корпуса, бортовой компьютер, накопитель для регистрации сигналов датчиков, аккумуляторные батареи и измерительный модуль, содержащий три ортогонально расположенных волоконно-оптических гироскопа и три ортогонально расположенных акселерометра.
Известен «Внутритрубный снаряд-дефектоскоп с колесными одометрами» (патент RU 2334980, МПК G01N 27/83, F17D 5/02, G01B 7/14, приоритет от 27.09.2008), который предназначен для повышения точности и надежности измерения пройденного внутритрубным снарядом-дефектоскопом расстояния и определения координат дефектов в трубопроводе. Внутритрубный снаряд-дефектоскоп снабжен термоконтейнером, опорными элементами в виде эластичных манжет с колесами, установленными за пределами полюсов магнита, концентрическими рядами ластов с пластинками-накладками, размещенными между полюсами постоянного магнита, в каждом из ластов вмонтированы герметично дефектоскопические датчики, предназначенные для измерения напряженности магнитного поля трубопровода.
Известен «Сверхвысокочастотный резонансный гироскоп с импульсно-периодическим возбуждением» (патент RU 161217, МПК G01C 19/64, приоритет от 10.11.2015), особенностью которого является повышение чувствительности сверхвысокочастотного резонансного гироскопа за счет применения круглого в поперечном сечении и в плане тонкостенного волновода-резонатора, а также перехода в режим работы, аналогичный режиму лазерного гироскопа путем применения генератора прямоугольных однополярных периодических импульсов.
Из известных технических решений наиболее близким к предлагаемому способу является способ определения положения трубопровода по результатам двух и более инспекционных пропусков по трубопроводу ВИП с установленным на нем диагностическим комплексом для определения положения трубопровода (далее - ДКОПТ) по одному и тому же участку трубопровода с одним и тем же направлением потока рабочей среды (патент RU 2558724, МПК F17D 5/00, приоритет от 17.12.2013). При этом данные, полученные с ДКОПТ, располагают по таблицам и совмещают по дистанциям. Данные пропуска ВИП с установленной на нем аппаратной частью ДКОПТ с более ранней датой считаются базовыми, данные последующих пропусков сравниваются с базовыми, критерием наличия перемещения трубопровода на инспектируемом участке является превышение модуля разностной кривизны заданного порогового значения. Недостатком данного способа является то, что способ оказывается неприемлем для оценивания опасных с точки зрения разрушения больших радиусов изгиба трубопровода (100…500 Ду, где Ду - условный внутренний диаметр трубопровода) вблизи отводов трубопровода с малым радиусом изгиба (1…100 Ду), так как использование измеренных значений малых радиусов невозможно из-за наличия большого числа локальных экстремумов интервала оценивания, что визуально проявляется как шумовая составляющая на данных, которая распределена около средней линии (около линии больших радиусов). В то же время измеренные значения больших радиусов также невозможно использовать вследствие того, что происходит «захвати значений радиуса вблизи отвода с малым радиусом изгиба по дистанции слева и справа от него по дистанции на величину интервала оценивания, так как при движении АКОПТ вблизи отвода трубопровода с большим радиусом изгиба в данные пропуска ВИП попадают данные по значениям углов, принадлежащие отводу с малым радиусом изгиба. В ситуации, когда дистанция между двумя отводами трубопровода меньше  (где - максимальная длина интервала оценивания в метрах), также невозможно измерить радиус изгиба между двумя отводами с малым радиусом изгиба, поскольку значения больших радиусов в этой области представляют собой сумму сигналов от двух отводов с малым радиусом изгиба слева и справа от исследуемой области трубопровода.
(где - максимальная длина интервала оценивания в метрах), также невозможно измерить радиус изгиба между двумя отводами с малым радиусом изгиба, поскольку значения больших радиусов в этой области представляют собой сумму сигналов от двух отводов с малым радиусом изгиба слева и справа от исследуемой области трубопровода.
Технический результат заявляемого изобретения состоит в разработке способа для измерения опасных (100…500 Ду) и неопасных (500…2500 Ду) с точки зрения разрушения трубопровода больших радиусов вертикального или горизонтального изгиба трубопровода, в том числе и вблизи отводов трубопровода с малым радиусом изгиба (1…100 ДУ), для определения положения трубопровода в пространстве на основе данных АКОПТ.
Технический результат достигается тем, что в способе измерения радиусов изгиба трубопровода на основе данных диагностического комплекса для определения положения трубопровода с встроенной бесплатформенной инерциальной навигационной системой, установленного на внутритрубном инспекционном приборе, который перемещают внутри трубопровода, после пропуска внутритрубного инспекционного прибора по трубопроводу полученные диагностические данные записывают на установленный на внутритрубном инспекционном приборе бортовой накопитель информации, причем полученные с бесплатформенной инерциальной навигационной системы диагностические данные передают с бортового накопителя информации на устройство для измерения радиусов изгиба трубопровода, включенное в автономный комплекс для интерпретации диагностических данных, который расположен вне трубопровода, и посредством устройства для измерения радиусов изгиба трубопровода производят измерение больших радиусов изгиба трубопровода от 100 до 2500 Ду, где Ду - внутренний условный диаметр трубопровода.
На вход устройства для измерения радиусов изгиба трубопровода могут поступать диагностические данные по пройденной внутритрубным инспекционным прибором дистанции s(iΔt) и по углу азимута или тангажа ψ(iΔt) с постоянным шагом по времени, при помощи сумматора и первого порогового устройства в составе устройства для измерения радиусов изгиба трубопровода осуществляют перевод диагностических данных в данные по пройденному участку дистанции s(jΔS0) с постоянным шагом по дистанции ΔS0 для j номера отсчета, где j - значение индекса, при этом каждый момент срабатывания первого порогового устройства является тактирующим сигналом, по которому с помощью первого ключа устройства для измерения радиусов изгиба трубопровода выбирается соответствующее пройденному участку дистанции s(jΔS0) значение угла ψ(jΔt), при этом счетчик импульсов увеличивает свое выходное значение на единицу по переднему фронту «1» логического сигнала «Тактирование», и посредством умножителя устройства для измерения радиусов изгиба трубопровода осуществляют перемножение постоянного значения шага по дистанции со значением номера отсчета j, причем перемножение происходит по смене значения, далее полученные значения ψ(jΔt) и s(jΔS0) помещают в первый и второй сдвигающие буферы устройства для измерения радиусов изгиба трубопровода, имеющие размерности 2N+1, где N - половина емкости каждого сдвигающего буфера относительно центрального отсчета, при этом первый и второй сдвигающие буферы реализованы по принципу FIFO, то есть по принципу «первый вошел - первый вышел», и по своей накопительной способности в метрах максимально близки к величине интервала оценивания, при этом данные на выходе первого сдвигающего буфера запаздывают по сравнению со значениями ψ(jΔt) на определенное количество тактов, что компенсируется входящими в устройство для измерения радиусов изгиба трубопровода первым, вторым и третьим вычитателями совместно с первым, вторым и третьим делителями, и затем формируются значения радиусов, которые соответствуют началу, середине и концу первого сдвигающего буфера, далее с помощью второго, третьего и четвертого пороговых устройств, входящих в устройство для измерения радиусов изгиба трубопровода, формируют признаки касания или прохождения первого сдвигающего буфера радиусов по установленному уровню, при этом схемы управления входящими в устройство для измерения радиусов изгиба трубопровода первым, вторым, третьим и четвертыми D-триггерами со статическим управлением по входу записи «С» организованы логическими элементами «HE1», «НЕ2», «И1», «И2», «И3», «ИЛИ» устройства для измерения радиусов изгиба трубопровода, коммутация данных по входу записи «D» организована первым, вторым и четвертым ключами, причем соответствующие углам ψA и ψB дистанции sA и sB выбирают из второго сдвигающего буфера при помощи второго и четвертого D-триггеров со статическим управлением, а также третьего и пятого ключей, которые имеют то же управление, что и соответствующие элементы для выборки значений углов, далее с помощью четвертого и пятого вычитателей устройства для измерения радиусов изгиба трубопровода совместно с четвертым делителем определяют выходное значение радиуса изгиба трубопровода r[(j-N)ΔS0] Для соответствующего значения дистанции s(j-N).
Измерения радиусов изгиба трубопровода могут производится как для вертикальных, так и для горизонтальных изгибов трубопровода.
Вблизи отводов трубопровода с малым радиусом изгиба от 1 до 100 Ду для измерения больших радиусов изгиба трубопровода от 100 до 2500 Ду могут быть учтены данные о динамически изменяемой ширине интервала оценивания в зависимости от дистанции между интервалом оценивания и каждым отводом трубопровода с малым радиусом изгиба.
Полученные устройством для измерения радиусов изгиба трубопровода выходные значения радиусов изгиба трубопровода могут быть направлены в автономный комплекс, в котором осуществляют преобразование измеренных радиусов изгиба трубопровода в графические изображения, далее графические изображения одного и того же участка трубопровода за разные периоды пропуска внутритрубного инспекционного прибора сравнивают между собой, накладывая заданные пороговые значения параметров радиусов изгиба трубопровода, при этом диагностические данные самого раннего пропуска внутритрубного инспекционного прибора по трубопроводу принимают за эталонный.
На фиг. 1 показана структурная схема устройства для измерения радиусов изгиба трубопровода на основе данных диагностического комплекса для определения положения трубопровода.
На фиг. 1 приняты следующие обозначения:
1. Данные по пройденной дистанции (s(iΔt));
2. Данные по углу азимута или тангажа (ψ(iΔt));
3. Сумматор (Сум);
4. Первое пороговое устройство (ПрУ);
5. Счетчик импульсов;
6. Умножитель;
7. Первый ключ (Кл1);
8. Данные по пройденному участку дистанции s(jΔS0) с постоянным шагом по дистанции ΔS0 для j номера отсчета;
9. Данные по углу ψ(jΔS0), соответствующее пройденному участку дистанции с постоянным шагом по дистанции ΔS0 для j номера отсчета;
10. Первый сдвигающий буфер, реализованный по принципу FIFO («первый вошел - первый вышел»);
11. Второй сдвигающий буфер, реализованный по принципу FIFO («первый вошел - первый вышел»);
12. Первый вычитатель (Выч1);
13. Второй вычитатель (Выч2);
14. Третий вычитатель (Выч3);
15. Первый делитель (Дел1);
16. Второй делитель (Дел2);
17. Третий делитель (Дел3);
18. Второе пороговое устройство (ПрУ2);
19. Третье пороговое устройство (ПрУ3);
20. Четвертое пороговое устройство (ПрУ4);
21. Первый D-триггер со статическим управлением (Трг1);
22. Третий D-триггер со статическим управлением (Трг3);
23. Логические элементы (И1, И2, И3, НЕ1, НЕ2, ИЛИ);
24. Второй ключ (Кл2);
25. Третий ключ (Кл3);
26. Второй D-триггер со статическим управлением (Трг2);
27. Четвертый D-триггер со статическим управлением (Трг4);
28. Четвертый ключ (Кл4);
29. Пятый ключ (Кл5);
30. Четвертый вычитатель (Выч4);
31. Пятый вычитатель (Выч5);
32. Четвертый делитель (Дел4).
В способе измерения радиусов изгиба трубопровода используют данные, полученные с бесплатформенной инерциальной навигационной системы (БИНС), встроенной в диагностический комплекс для определения положения трубопровода (ДКОПТ), при этом ДКОПТ установлен на внутритрубном инспекционном приборе (ВИП). ВИП перемещают внутри исследуемого трубопровода. Полученные диагностические данные, записанные на установленный на ВИП бортовой накопитель информации, передают с бортового накопителя информации на устройство для измерения радиусов изгиба трубопровода (фиг. 1), включенное в автономный комплекс для интерпретации диагностических данных, который расположен вне трубопровода, и производят измерение больших радиусов изгиба трубопровода от 100 до 2500 Ду (где Ду - внутренний условный диаметр трубопровода) посредством расчета ряда параметров. Измерения радиусов изгиба трубопровода производят как для вертикальных, так и для горизонтальных изгибов трубопровода. Вблизи отводов трубопровода с малым радиусом изгиба от 1 до 100 Ду при расчете параметров для измерения больших радиусов изгиба трубопровода от 100 до 2500 Ду также учитывают данные о динамически изменяемой ширине интервала оценивания в зависимости от дистанции между интервалом оценивания и каждым отводом трубопровода с малым радиусом изгиба.
Для измерения больших радиусов изгиба трубопровода полученные с БИНС данные (1) по пройденной ВИП дистанции s(iΔt) и данные (2) по углу азимута или тангажа ψ(iΔt) с постоянным шагом по времени Δt загружают на вход устройства для измерения радиусов изгиба трубопровода (фиг. 1). При помощи сумматора (3) и первого порогового устройства (4) осуществляется перевод данных (1) в данные (8) по пройденному участку дистанции s(jΔS0) с постоянным шагом по дистанции ΔS0 для j номера отсчета, где j значение индекса. Каждый момент срабатывания первого порогового устройства (4) является тактирующим сигналом, по которому с помощью первого ключа (7) выбирается соответствующее пройденному участку дистанции s(jΔS0) значение (9) угла ψ(jΔt). При этом счетчик импульсов (5) увеличивает свое выходное значение на единицу по переднему фронту «1» логического сигнала «Тактирование», а посредством умножителя (6) осуществляют перемножение постоянного значения шага по дистанции со значением номера отсчета j, причем перемножение происходит по смене значения. Далее полученные значения ψ(jΔf) и s(jΔS0) помещаются в первый (10) и второй (11) сдвигающие буферы размерности 2N+1, где N - половина емкости каждого сдвигающего буфера относительно центрального отсчета, при этом первый (10) и второй (11) сдвигающие буферы реализованы по принципу FIFO, то есть по принципу: «первый вошел - первый вышел». Причем каждый из сдвигающих буферов по своей накопительной способности в метрах (2N+1)ΔS0 максимально близок к величине интервала оценивания  . Данные на выходе первого (10) сдвигающего буфера запаздывают по сравнению со значениями ψ(jΔf) на определенное количество тактов, что компенсируется первым (12), вторым (13) и третьим (14) вычитателями совместно с первым (15), вторым (16) и третьим (17) делителями, и затем формируются значения радиусов, которые соответствуют началу, середине и концу первого (10) сдвигающего буфера.
. Данные на выходе первого (10) сдвигающего буфера запаздывают по сравнению со значениями ψ(jΔf) на определенное количество тактов, что компенсируется первым (12), вторым (13) и третьим (14) вычитателями совместно с первым (15), вторым (16) и третьим (17) делителями, и затем формируются значения радиусов, которые соответствуют началу, середине и концу первого (10) сдвигающего буфера.
С помощью второго (18), третьего (19) и четвертого (20) пороговых устройств формируются признаки касания или прохождения первого (10) сдвигающего буфера радиусов по установленному уровню. Соответствие сформированных признаков местонахождения первого сдвигающего буфера (10) относительно радиуса изгиба отвода трубопровода и данных с выходов первого (21) и третьего (21) D-триггеров со статическим управлением представлено в Таблице 1, где 0 - обозначает - «нет», 1 - «да».
Схемы управления первым (21) вторым (26), третьим (22) и четвертым (27) D-триггерами со статическим управлением по входу записи «С» организованы логическими элементами «НЕ1», «НЕ2», И1», «И2», «И3», «ИЛИ» (23), коммутация данных по входу записи «D" организована первым (7), вторым (24) и четвертым (28) ключами. При этом соответствующие углам ψA и ψB в дистанции sA и sB выбираются из второго сдвигающего буфера (11) при помощи второго (26) и четвертого (27) D-триггеров со статическим управлением, а также третьего (25) и пятого (29) ключей, которые имеют то же управление, что и соответствующие элементы для выборки значений углов. Далее с помощью четвертого (30) и пятого (31) вычитателей совместно с четвертым делителем (32) определяют выходное значение радиуса изгиба трубопровода r[(j-N)ΔS0] для соответствующего значения дистанции s[(j-N)ΔS0].
Полученные устройством для измерения радиусов изгиба трубопровода выходные значения радиусов изгиба трубопровода направляют в автономный комплекс для интерпретации диагностических данных, посредством которого преобразовывают измеренные радиусы изгиба (как вертикальные, так и горизонтальные) трубопровода в графические изображения Полученные графические изображения одного и того же участка трубопровода за разные периоды пропуска ВИП сравнивают между собой, накладывая заданные пороговые значения параметров радиусов изгиба трубопровода. Параметры, выходящие за пределы заданных пороговых значений параметров радиусов изгиба трубопровода, определяют как критические перемещения трубопровода на данном участке трубопровода, которые могут привести к разрушению трубопровода. Далее разрабатывают мероприятия по предотвращению разрушения трубопровода.
Изобретение относится к измерительной технике и может быть использовано для определения положения трубопровода в пространстве, например в горизонтальной и вертикальной плоскостях при эксплуатации и строительстве трубопроводов. Технический результат – расширение функциональных возможностей на основе измерения опасных (100…500 Ду) и неопасных (500…2500 Ду) с точки зрения разрушения трубопровода больших радиусов вертикального или горизонтального изгиба трубопровода, в том числе и вблизи отводов трубопровода с малым радиусом изгиба (1…100Ду), где Ду – внутренний условный диаметр трубопровода. Для этого в способе измерения радиусов изгиба трубопровода на основе данных диагностического комплекса для определения положения трубопровода с встроенной бесплатформенной инерциальной навигационной системой, установленного на внутритрубном инспекционном приборе, который перемещают внутри трубопровода, после пропуска внутритрубного инспекционного прибора по трубопроводу полученные диагностические данные записывают на установленный на внутритрубном инспекционном приборе бортовой накопитель информации, причем полученные с бесплатформенной инерциальной навигационной системы диагностические данные передают с бортового накопителя информации на устройство для измерения радиусов изгиба трубопровода, включенное в автономный комплекс для интерпретации диагностических данных, который расположен вне трубопровода, и посредством устройства для измерения радиусов изгиба трубопровода производят измерение больших радиусов изгиба трубопровода от 100 до 2500 Ду. 4 з.п. ф-лы, 1 ил., 1 ил.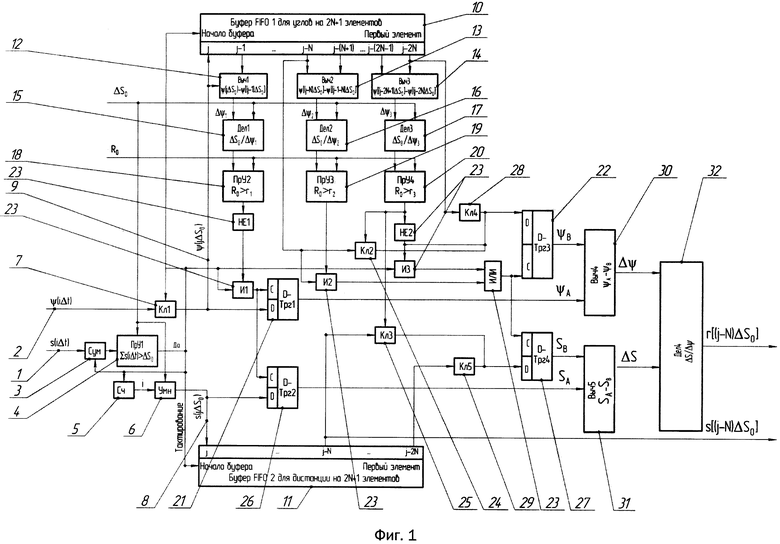
1. Способ измерения радиусов изгиба трубопровода на основе данных диагностического комплекса для определения положения трубопровода с встроенной бесплатформенной инерциальной навигационной системой, установленного на внутритрубном инспекционном приборе, который перемещают внутри трубопровода, причем после пропуска внутритрубного инспекционного прибора по трубопроводу полученные диагностические данные записывают на установленный на внутритрубном инспекционном приборе бортовой накопитель информации, отличающийся тем, что полученные с бесплатформенной инерциальной навигационной системы диагностические данные передают с бортового накопителя информации на устройство для измерения радиусов изгиба трубопровода, включенное в автономный комплекс для интерпретации диагностических данных, который расположен вне трубопровода, и посредством устройства для измерения радиусов изгиба трубопровода производят измерение больших радиусов изгиба трубопровода от 100 до 2500 Ду, где Ду - внутренний условный диаметр трубопровода.
2. Способ по п.1, отличающийся тем, что на вход устройства для измерения радиусов изгиба трубопровода поступают диагностические данные по пройденной внутритрубным инспекционным прибором дистанции s(iΔt) и по углу азимута или тангажа ψ(iΔt) с постоянным шагом по времени, при помощи сумматора и первого порогового устройства в составе устройства для измерения радиусов изгиба трубопровода осуществляют перевод диагностических данных в данные по пройденному участку дистанции s(jΔS0) с постоянным шагом по дистанции ΔS0 для j номера отсчета, где j - значение индекса, при этом каждый момент срабатывания первого порогового устройства является тактирующим сигналом, по которому с помощью первого ключа устройства для измерения радиусов изгиба трубопровода выбирается соответствующее пройденному участку дистанции s(jΔS0) значение угла ψ(jΔt), при этом счетчик импульсов увеличивает свое выходное значение на единицу по переднему фронту «1» логического сигнала «Тактирование», и посредством умножителя устройства для измерения радиусов изгиба трубопровода осуществляют перемножение постоянного значения шага по дистанции со значением номера отсчета j, причем перемножение происходит по смене значения, далее полученные значения ψ(jΔt) и s(jΔS0) помещают в первый и второй сдвигающие буферы устройства для измерения радиусов изгиба трубопровода, имеющие размерности 2N+1, где N - половина емкости каждого сдвигающего буфера относительно центрального отсчета, при этом первый и второй сдвигающие буферы реализованы по принципу FIFO, то есть по принципу «первый вошел - первый вышел», и по своей накопительной способности в метрах максимально близки к величине интервала оценивания, при этом данные на выходе первого сдвигающего буфера запаздывают по сравнению со значениями ψ(jΔt) на определенное количество тактов, что компенсируется входящими в устройство для измерения радиусов изгиба трубопровода первым, вторым и третьим вычитателями совместно с первым, вторым и третьим делителями, и затем формируются значения радиусов, которые соответствуют началу, середине и концу первого сдвигающего буфера, далее с помощью второго, третьего и четвертого пороговых устройств, входящих в устройство для измерения радиусов изгиба трубопровода, формируют признаки касания или прохождения первого сдвигающего буфера радиусов по установленному уровню, при этом схемы управления входящими в устройство для измерения радиусов изгиба трубопровода первым, вторым, третьим и четвертыми D-триггерами со статическим управлением по входу записи «С» организованы логическими элементами «НЕ1», «НЕ2», «И1», «И2», «И3», «ИЛИ» устройства для измерения радиусов изгиба трубопровода, коммутация данных по входу записи «D» организована первым, вторым и четвертым ключами, причем соответствующие углам ψA и ψB дистанции sA и sB выбирают из второго сдвигающего буфера при помощи второго и четвертого D-триггеров со статическим управлением, а также третьего и пятого ключей, которые имеют то же управление, что и соответствующие элементы для выборки значений углов, далее с помощью четвертого и пятого вычитателей устройства для измерения радиусов изгиба трубопровода совместно с четвертым делителем определяют выходное значение радиуса изгиба трубопровода r[(j-N)ΔS0] для соответствующего значения дистанции s[(j-N)ΔS0].
3. Способ по п. 1, отличающийся тем, что измерения радиусов изгиба трубопровода производят как для вертикальных, так и для горизонтальных изгибов трубопровода.
4. Способ по п. 1, отличающийся тем, что вблизи отводов трубопровода с малым радиусом изгиба от 1 до 100 Ду для измерения больших радиусов изгиба трубопровода от 100 до 2500 Ду учитывают данные о динамически изменяемой ширине интервала оценивания в зависимости от дистанции между интервалом оценивания и каждым отводом трубопровода с малым радиусом изгиба.
5. Способ по п. 1, отличающийся тем, что полученные устройством для измерения радиусов изгиба трубопровода выходные значения радиусов изгиба трубопровода направляют в автономный комплекс, в котором осуществляют преобразование измеренных радиусов изгиба трубопровода в графические изображения, далее графические изображения одного и того же участка трубопровода за разные периоды пропуска внутритрубного инспекционного прибора сравнивают между собой, накладывая заданные пороговые значения параметров радиусов изгиба трубопровода, при этом диагностические данные самого раннего пропуска внутритрубного инспекционного прибора по трубопроводу принимают за эталонный.
| УСТРОЙСТВО ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДА И СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ТРУБОПРОВОДА ПО РЕЗУЛЬТАТАМ ДВУХ И БОЛЕЕ ИНСПЕКЦИОННЫХ ПРОПУСКОВ ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДА | 2013 |
|
RU2558724C2 |
| US 6243657 B1, 05.06.2001 | |||
| US 6553322 В1, 22.04.2003 | |||
| US 5331578 A, 19.07.1994 | |||
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С КОЛЕСНЫМИ ОДОМЕТРАМИ | 2007 |
|
RU2334980C1 |
| Ботуз С.П., Четверов С.Ю | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Москва, ИПУ РАН, 27 февраля по 1 марта 2002г | |||
| - М.: РНТОРЭС, 2002 | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ УСТРАНЕНИЯ СКОЛЬЖЕНИЯ КОЛЕС АВТОМОБИЛЕЙ | 1920 |
|
SU292A1 |

