Изобретение относится к области неразрушающего контроля трубопроводов и может быть использовано при проведении внутритрубного контроля трубопровода путем иммерсионного ультразвукового дифракционно-временного метода ToFD с помощью автономных внутритрубных инспекционных приборов, движущихся с потоком перекачиваемого продукта (жидкости) и автоматически выполняющих процесс контроля с сохранением на своем борту результатов контроля в виде диагностических данных.
Известен метод ToFD (time-of-flight diffraction) ультразвукового неразрушающего контроля, сущность и способы осуществления которого приведены в следующих работах и документах:
- Справочник в 7 томах под редакцией чл.-корр. РАН В.В. Клюева. Москва «Машиностроение» 2004, том 3, И.Н Ермолов, Ю.В. Ланге. «Ультразвуковой контроль». Дифракционно-временной метод (ДВМ) п. 2.2.5.3 стр. 252; п. 3.2.7.5 стр. 371;
- EN 15617:2009 Non-destructive testing of welds - Time-of-flight diffraction technique (ToFD) - Acceptance levels [Неразрушающий контроль сварных соединений. Дифракционно-временной метод (ToFD). Границы допустимости];
- EN 583-6:2008 Non-destructive testing - Ultrasonic examination - Part 6: Time-of-flight diffraction technique as f method for detection and sizing of discontinuilies [Контроль неразрушающий. Ультразвуковой метод. Часть 6. Дифракционно-временной метод обнаружения и измерения несплошностей];
- ISO 10863:11 Non-destructive testing of welds - Ultrasonic testing - Use of time-of-flight diffraction technique (ToFD). [Неразрушающий контроль сварных соединений. Ультразвуковая дефектоскопия. Использование дифракционно-временного метода (ToFD)].
В приведенных источниках метод ToFD осуществляется с помощью внутритрубных инспекционных приборов, конструкция которых содержит штатную схему реализации данного метода и включает пару ультразвуковых пьезоэлектрических преобразователей: пьезоэлектрический преобразователь ToFD-излучатель и пьезоэлектрический преобразователь ToFD-приемник (классическая пара пьезоэлектрических преобразователей ToFD), ориентированных друг относительно друга, для чего они размещаются на жесткой раме или жестких механически независимых блоках. При этом расстояние между пьезоэлектрическими преобразователями ToFD-излучателем и ToFD-приемником зависит от толщины стенки объекта контроля и от ширины валика усиления сварного шва. Все известные технические устройства используют эту единственную штатную схему реализации метода ToFD.
Недостатком этих устройств, использующих в своей конструкции данную штатную схему, является сложность реализации метода ToFD при автоматическом контроле трубопроводов, поскольку в процессе контроля толщина контролируемых труб может меняться от 8 до 30 мм. Было определено, что для покрытия этого диапазона толщин необходимо как минимум три варианта расположения пьезоэлектрических преобразователей друг относительно друга (три варианта расстояния между точками ввода - PCS). Поэтому для внутритрубного контроля необходимо использовать шесть механически независимых друг относительно друга жестких блока: три жестких блока для контроля поперечных швов и базового материала с поперечно ориентированными дефектами трубопровода и три жестких блока для контроля продольных швов и базового материала с продольно ориентированными дефектами трубопровода. В каждом из жестких блоков должна быть классическая пара пьезоэлектрических преобразователей ToFD. Таким образом при реализации метода ToFD по штатной схеме требуется 12 пьезоэлектрических преобразователей ToFD для осуществления последовательных единичных прозвучиваний при полном контроле трубопровода с дефектами любой ориентации. При этом среди двенадцати пьезоэлектрических преобразователей ToFD шесть должны быть пьезоэлектрическими преобразователями ToFD-излучателями. Кроме этого, 12 пьезоэлектрических преобразователей ToFD должны быть размещены на шести жестких блоках.
Дополнительным недостатком внутритрубных инспекционных приборов, использующих в своей конструкции штатную схему, является отсутствие или частичная регистрация LW-волны (продольная подповерхностная волна, Lateral wave). Учитывая тяжелые для прохождения ультразвука условия при проведении внутритрубного контроля, а также учитывая высокую интенсивность падения энергии LW-волны, ее регистрация классическими парами пьезоэлектрических преобразователей ToFD, предназначенными для контроля толстых стенок, не представляется возможной или имеет крайне низкую вероятность (стабильность) при контроле толстых стенок и особенно при наличии широких сварных швов (ширина внутренних валиков усиления продольных швов может достигать 50 мм). Отсутствие регистрации LW-волны не позволяет выполнить измерение глубины и глубины залегания дефектов, а также измерение положения индикаций по глубине. Восстановление положения LW-волны по расчетам или экспериментальным данным приведет к большой погрешности, исключающей возможность такого восстановления. Большая погрешность связана с тем, что при восстановлении положения LW-волны в штатной схеме необходимо учитывать неизвестное заранее время хода ультразвуковой волны в иммерсионной среде (составляет большую часть общего времени хода ультразвуковой волны), зависящее от большого количества факторов, включающих: физические свойства иммерсионной среды, состояние поверхности ввода и ее ориентации (включая расстояние) до пьезоэлектрических преобразователей ToFD.
Кроме того, в тяжелых условиях (неподготовленная поверхность, загрязнения) внутритрубного контроля для получения дополнительных критериев и признаков расположения дефектов в стенке трубы и относительно элементов сварного шва, для увеличения вероятности обнаружения дефектов и увеличения точности определения их геометрических параметров необходимо применение двузонного контроля и параллельного сканирования, реализация которых возможна с применением штатной схемы метода ToFD для проведения внутритрубного контроля трубопровода.
Совокупность признаков, наиболее близкая к совокупности существенных признаков изобретения, реализована в представленном на X международной трубопроводной конференции внутритрубном кроулере [https://www.researchgate.net/publication/289135398_Qualification_of_a_Combined_Ultrasonic_Inspection_Tool_for_ Detection_and_Sizing_of_Circumferential_Weld_Cracks_in_Offshore_Pipelines], имеющем жесткую механическую связь с наружным устройством и управляемым оператором снаружи трубопровода по оптико-волоконному кабелю. Кроулер осуществляет контроль поперечных швов кольцевых стыков трубопровода во время его полной остановки оператором. В кроулере реализована известная схема контроля методом ToFD с классической парой пьезоэлектрических преобразователей ToFD, размещенной на механическом раздвижном устройстве для обеспечения положения пьезоэлектрических преобразователей ToFD в зависимости от толщины стенки объекта контроля. В секции ToFD кроулера используется только две пары пьезоэлектрических преобразователей ToFD (каждая выполняет сканирование половины периметра поперечного шва), осуществляющих контроль только поперечного шва. Это становится возможным только в момент остановки кроулера и точного позиционирования оператором блоков с парой пьезоэлектрических преобразователей ToFD относительно поперечного шва и позиционирования самих пьезоэлектрических преобразователей ToFD друг относительно друга в зависимости от толщины стенки объекта контроля. Далее осуществляется контроль поперечного шва за счет устройства вращения блоков вдоль образующей трубы и обеспечивающего сканирование вдоль поперечного шва. Диагностическая информация по оптико-волоконному кабелю передается оператору. Устройство (кроулер) называется «Qualification of a combined ultrasonic inspection tool for detection and sizing of circumferential weld cracks in offshore pipelines» («Использование совмещения способов ультразвукового контроля для обнаружения и измерение размеров трещин в кольцевых сварных швах подводных трубопроводов))). На конференции его представили: Herbert Willems NTD Global Stutensee (Германия), а также Hans Petter Bjorgen STATOIL Stjordal, Thor-Stale Ktistiansen KTN Bergen, Guus Wieme KTN Bergen (Норвегия).
Также прототип обладает следующими недостатками. При осуществлении иммерсионного ультразвукового дифракционно-временного метода ToFD для внутритрубного контроля трубопроводов отсутствует возможность использования указанного кроулера по ряду причин.
Во-первых, из-за большой протяженности контролируемых участков, достигающих сотни километров, потребуется модернизация трубопроводов с организацией большого числа запасовочных устройств и задвижек, при этом запасовочные устройства по высотному положению всегда должны располагаться выше контролируемого участка и располагаться в точках максимумах высотного положения трубопровода.
Во-вторых, потребуется полная остановка коммерческой перекачки продукта на длительный срок из-за низкой производительности контроля (низкая производительность контроля поперечных швов).
В-третьих, кроулер выполняет ограниченный объем контроля: контролируются только поперечные швы и не осуществляется необходимый полный объем контроля. Дополнительно необходимо контролировать продольные швы и базовый материал в двух направлениях - вдоль трубы и по ее образующей.
В-четвертых, при реализации контроля толстостенных трубопроводов и широких сварных швов с использованием штатной схемы контроля, примененной в кроулере, возникнет проблема, связанная с отсутствием регистрации LW-волны.
В-пятых, в связи с применением только одной классической пары пьезоэлектрических преобразователей ToFD, особенностями перемещения и сканирования, реализованными в кроулере, применение двузонного контроля и параллельного сканирования невозможно.
Указанные недостатки прототипа устраняются заявленным изобретением.
Техническим результатом, на достижение которого направлено изобретение, является повышение качества внутритрубного контроля, а именно осуществление контроля поперечных, продольных сварных швов и базового материала трубопровода методом ToFD за один пропуск внутритрубного инспекционного прибора по трубопроводу с меняющейся толщиной стенки от 8 до 30 мм.
Другими техническими результатами, обеспечиваемыми изобретением, являются:
- уменьшение в полтора раза общего необходимого количества пьезоэлектрических преобразователей ToFD, устанавливаемых на внутритрубный инспекционный прибор (при реализации метода ToFD по штатной схеме требуется 12 пьезоэлектрических преобразователей ToFD для осуществления последовательных единичных прозвучиваний, а в предлагаемом изобретении - 8);
- уменьшение в три раза количества пьезоэлектрических преобразователей ToFD-излучателей, что сокращает энергозатратность контроля и исключает внесение в состав внутритрубного инспекционного прибора дополнительных батарейных секций (при реализации метода ToFD по штатной схеме требуется 6 пьезоэлектрических преобразователей ToFD-излучателей для осуществления последовательных единичных прозвучиваний, а в предлагаемом изобретении - 2);
- уменьшение в три раза количества жестких механически независимых блоков для размещения пьезоэлектрических преобразователей ToFD, что в свою очередь значительно уменьшает габариты носителя датчиков внутритрубного инспекционного прибора, а также число секций с носителями датчиков (при реализации метода ToFD по штатной схеме требуется 6 жестких блоков для осуществления последовательных единичных прозвучиваний, а в предлагаемом изобретении - 2).
- восстановление положения LW-волны при контроле толстостенных труб и труб с увеличенной шириной внутренних валиков усиления сварных швов, что позволяет осуществить измерение глубины дефектов в этих случаях контроля (при реализации метода ToFD по штатной схеме восстановление положения LW-волны невозможно). Также восстановление положения LW-волны позволит выполнить двузонный контроль и параллельное сканирование толстостенных труб и труб с увеличенной шириной внутренних валиков усиления сварных швов.
Технический результат изобретения достигается тем, что носитель датчиков выполнен с возможностью установки на внутритрубном инспекционном приборе и имеет множество датчиков, распределенных по его окружности, причем указанное множество датчиков представляет собой ультразвуковые пьезоэлектрические преобразователи ToFD, размещенные в жестких блоках. При этом жесткие блоки объединены в две секции внутритрубного инспекционного прибора, первая из которых выполняет функцию контроля поперечных сварных швов и базового материала трубопровода с поперечно ориентированными дефектами трубопровода, а вторая выполняет функцию контроля продольных сварных швов и базового материала трубопровода с продольно ориентированными дефектами трубопровода. Кроме того, согласно изобретению, пьезоэлектрические преобразователи ToFD размещены на жестких блоках в количестве четырех штук на один блок, один пьезоэлектрический преобразователь ToFD из которых является излучателем, а остальные три являются приемниками, одновременно осуществляющими прием результатов прозвучивания одного зондирующего импульса излучателя, при этом все четыре пьезоэлектрических преобразователя ToFD располагаются в ряд на одной PCS-линии так, что акустические оси всех пьезоэлектрических преобразователей ToFD находятся в одной плоскости.
В частном случае, связанном с закреплением жестких блоков в первой и второй секциях, данные блоки закреплены шарнирно с обеспечением прижима блоков к внутренней поверхности трубопровода так, что точки опоры жестких блоков не меняются во время движения внутритрубного инспекционного прибора по трубопроводу.
Кроме того, жесткие блоки первой секции внутритрубного инспекционного прибора размещены с шагом не более 1 мм по образующей внутренней поверхности трубы, при этом точки опоры жестких блоков первой секции расположены на передних и задних гранях жестких блоков на оси, параллельной направлению движения внутритрубного инспекционного прибора, а пьезоэлектрические преобразователи ToFD в жестких блоках первой секции ориентированы так, что PCS-линия перпендикулярна образующей трубы и параллельна оси первой секции.
Также жесткие блоки второй секции внутритрубного инспекционного прибора размещены с шагом не более 3 мм по образующей внутренней поверхности трубы, при этом точки опоры жестких блоков второй секции расположены на боковых гранях жестких блоков на оси, перпендикулярной направлению движения внутритрубного инспекционного прибора, а пьезоэлектрические преобразователи ToFD в жестких блоках второй секции ориентированы так, что PCS-линия параллельна образующей трубы и перпендикулярна оси второй секции.
Сущность изобретения поясняется чертежами.
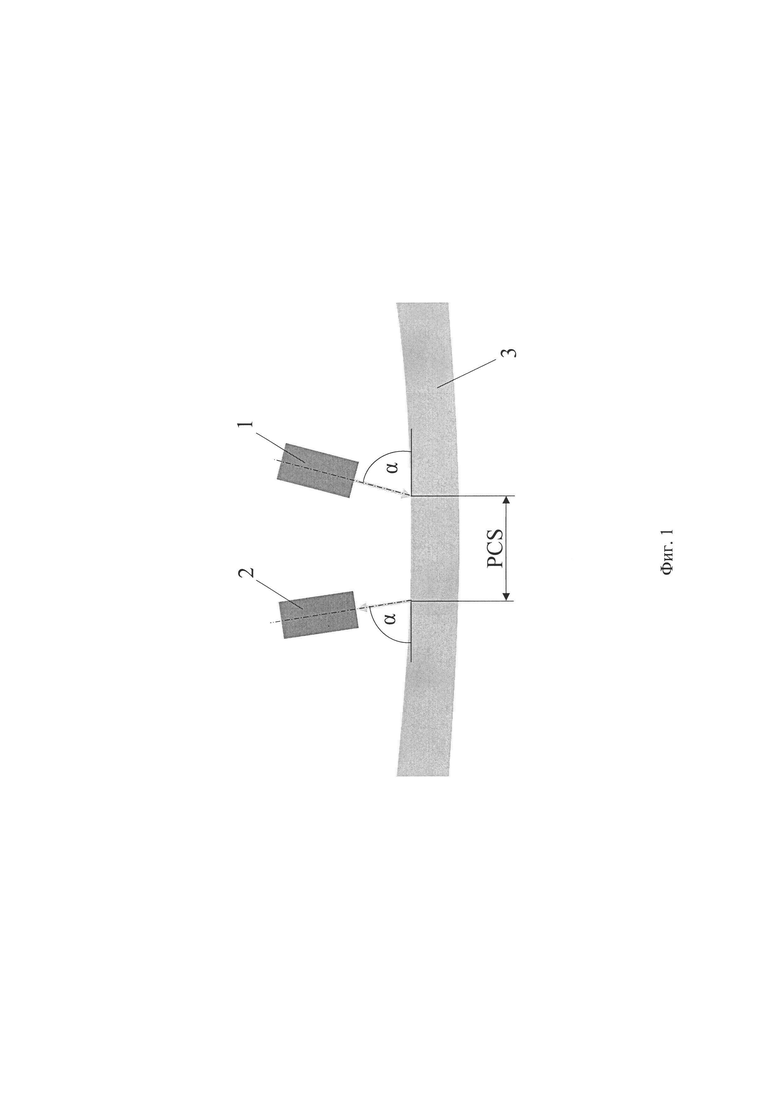
На фиг. 1 показана штатная схема реализации метода ToFD.
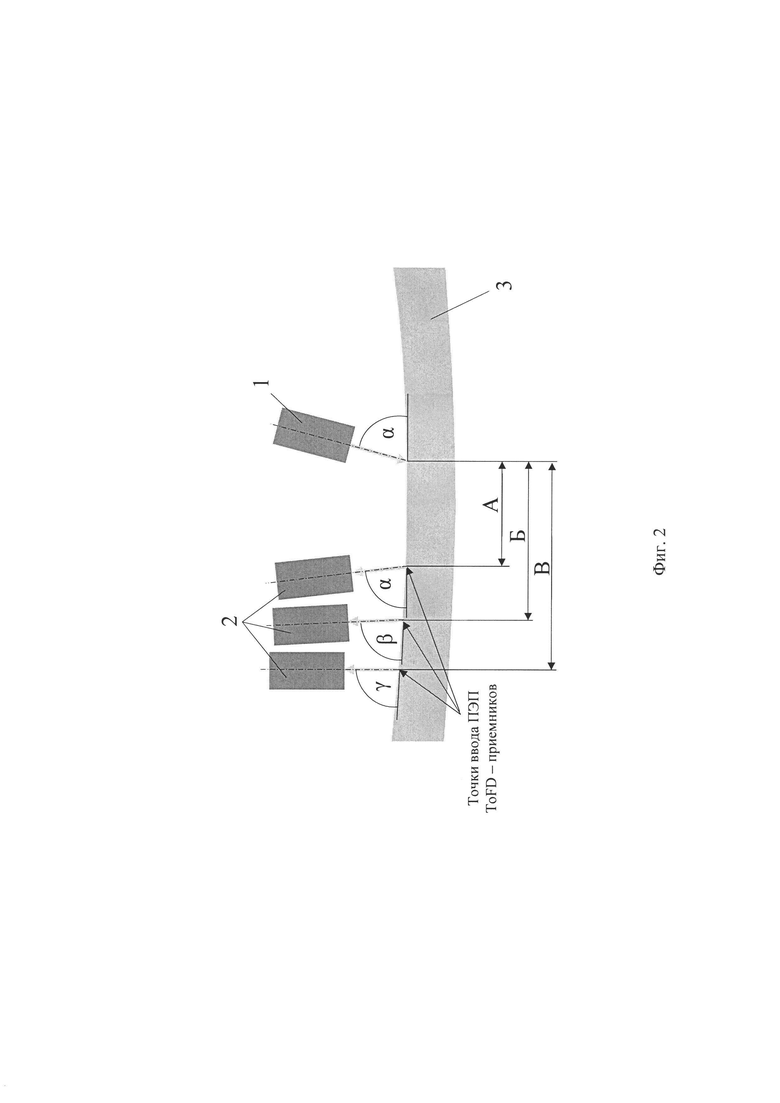
На фиг. 2 показано расположение пьезоэлектрических преобразователей ToFD в соответствии с заявляемым изобретением (схема реализации метода ToFD, предлагаемая в заявляемом изобретении).
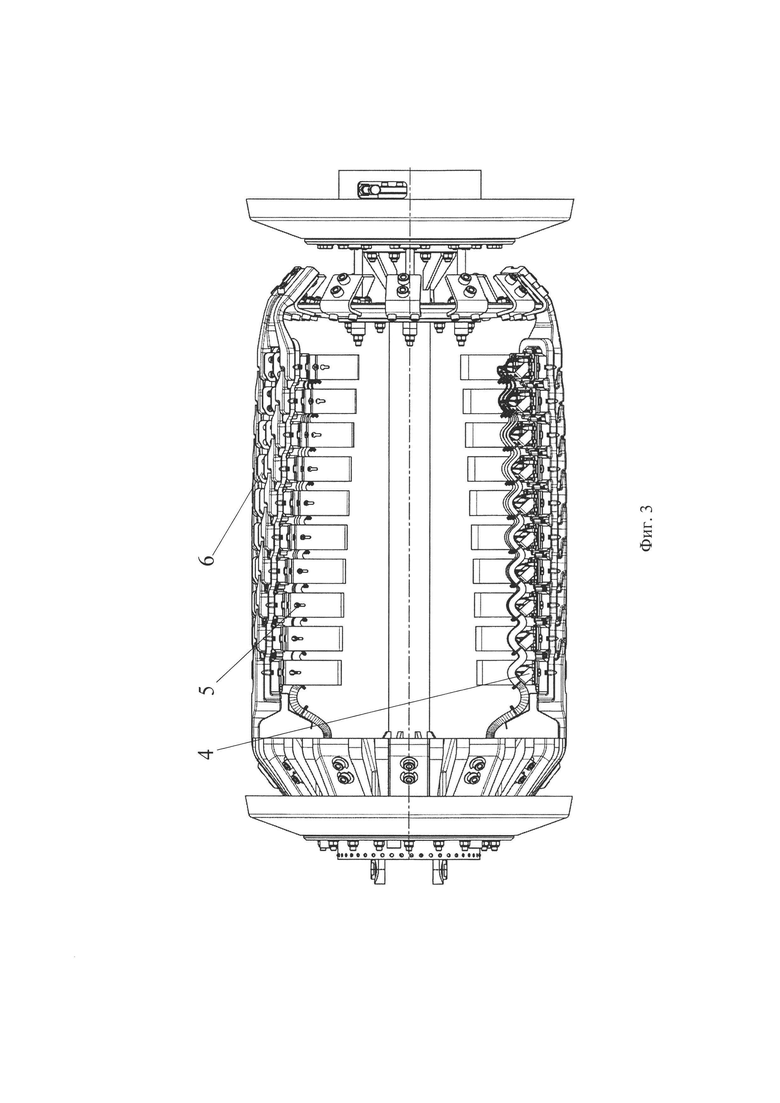
На фиг. 3 приведена конструкция секции носителя датчиков внутритрубного инспекционного прибора.
На чертежах приняты следующие обозначения:
1 - пьезоэлектрический преобразователь ToFD-излучатель;
2 - пьезоэлектрический преобразователь ToFD-приемник;
3 - объект контроля;
4 - система подвеса;
5 - система прижима жестких блоков к стенке трубы;
6 - жесткий блок.
Заявляемый носитель датчиков включает пьезоэлектрические преобразователи ToFD, которые размещены в жестких блоках, при этом жесткие блоки объединены в две секции внутритрубного инспекционного прибора: первая секция - для контроля поперечных швов и базового материала с поперечно ориентированными дефектами трубопровода, вторая секция - для контроля продольных швов и базового материала с продольно ориентированными дефектами трубопровода (поперечно и продольно ориентированные дефекты в сумме образуют полный диапазон возможных ориентаций дефектов базового материала). Пьезоэлектрические преобразователи ToFD размещены на жестких блоках в количестве четырех штук на один блок таким образом, что среди них только один пьезоэлектрический преобразователь ToFD является излучателем, а остальные три пьезоэлектрических преобразователя ToFD являются приемниками, при этом все пьезоэлектрические преобразователи ToFD располагаются в ряд на одной линии (PCS-линия), так что акустические оси всех пьезоэлектрических преобразователей ToFD находятся в одной плоскости, а каждый из принимающих пьезоэлектрических преобразователей ToFD образует совместно с излучающим пьезоэлектрическим преобразователем ToFD классическую (известную по нормативной документации на метод ToFD) пару пьезоэлектрических преобразователей ToFD, к которой возможно применение всех известных методик расчетов для определения параметров ориентации пьезоэлектрических преобразователей ToFD по отношению друг к другу и по отношению к объекту контроля (трубопроводу), а также возможно применение всех известных методик расчетов при построении диагностических данных и измерении геометрических параметров дефектов. Закрепление жестких блоков в первой и второй секциях осуществляется шарнирно с обеспечением прижима блоков так, что их точки опоры не меняются во время движения ВИП по трубопроводу. Размещение жестких блоков в первой секции осуществляется с шагом не более 1 мм по образующей трубы (внутренняя поверхность трубы), при этом жесткие блоки первой секции отличаются тем, что точки опоры жестких блоков расположены в начале и конце жестких блоков (по передней и задней грани жестких блоков относительно направления движения внутритрубного инспекционного прибора), а ориентация пьезоэлектрических преобразователей ToFD в жестких блоках первой секции такова, что PCS-линия перпендикулярна образующей трубы (параллельна оси первой секции). Размещение жестких блоков во второй секции осуществляется с шагом не более 3 мм по образующей трубы (внутренняя поверхность трубы), при этом жесткие блоки второй секции отличаются тем, что точки опоры жестких блоков расположены в правой части и левой части жестких блоков (по боковым граням жестких блоков относительно направления движения внутритрубного инспекционного прибора), а ориентация пьезоэлектрических преобразователей ToFD в блоках второй секции ВИП такова, что PCS-линия параллельна образующей трубы (перпендикулярна оси второй секции).
Устройство работает следующим образом. Способ получения диагностических данных ToFD включает автоматический процесс контроля, который заключается в последовательных единичных прозвучиваниях и регистрации осциллограмм в процессе движения внутритрубного диагностического прибора по трубопроводу с потоком перекачиваемой жидкости. При этом для единичного прозвучивания используется вышеописанная схема реализации метода ToFD, в которой осуществляется излучение зондирующего импульса только одним пьезоэлектрическим преобразователем ToFD-излучателем, а прием LW-волны и дифракционных отражений (сигналов) осуществляется одновременно сразу тремя пьезоэлектрическими преобразователями ToFD-приемниками этого же жесткого блока, при этом полученные на этих пьезоэлектрических преобразователях ToFD-приемниках осциллограммы сигналов записываются (сохраняются) на борту внутритрубного инспекционного прибора с возможностью последующего копирования на внешние носители информации и последующей подготовки к визуализации и обработке в программе интерпретации.
Для получения осциллограмм в процессе движения внутритрубного инспекционного прибора с потоком перекачиваемого продукта осуществляются единичные прозвучивания каждым жестким блоком первой секции с шагом не более 3 мм (при прохождении внутритрубного инспекционного прибора расстояния 3 мм по трубопроводу), но с интервалом не менее 45 мкс, а каждым жестким блоком второй секции с шагом не более 1 мм, но с интервалом не менее 45 мкс, при этом единичные прозвучивания жесткими блоками первой и второй секции осуществляются однотипно: шестью группами жестких блоков с интервалом не менее 45 мкс так, что единичные прозвучивания в каждой группе выполняются одновременно, а группы образованы таким образом, что шесть подряд расположенных по окружности жестких блока (по образующей трубопровода), например, с номерами 1, 2, 3, 4, 5, 6, входят в разные группы с соответствующими номерами (от 1 до 6), при этом очередность одновременного прозвучивания группами следующая: 1, 3, 5, 2, 6, 4.
Осциллограммы пьезоэлектрических преобразователей ToFD-приемников первой секции подготавливаются к визуализации и обработке в программе интерпретации, при этом подготовка заключается в формировании трех CrossB-сканов, каждый из которых отображает осциллограммы только однотипных пьезоэлектрических преобразователей ToFD-приемников, а именно пьезоэлектрических преобразователей ToFD-приемников, расположенных на одинаковом расстоянии относительно пьезоэлектрического преобразователя ToFD-излучателя. Осциллограммы пьезоэлектрических преобразователей ToFD-приемников второй секции подготавливаются к визуализации и обработке в программе интерпретации, при этом подготовка заключается в формировании трех известных В-сканов, каждый из которых отображает осциллограммы только однотипных пьезоэлектрических преобразователей ToFD-приемников, а именно пьезоэлектрических преобразователей ToFD-приемников, расположенных на одинаковом расстоянии относительно пьезоэлектрического преобразователя ToFD-излучателя. CrossB-сканы обеспечивают построение диагностических данных ToFD первой секции, пригодных к визуализации и обработке в программе интерпретации, при этом построение CrossB-сканов осуществляется в следующих координатах: по оси абсцисс - номера пьезоэлектрических преобразователей ToFD-приемников, находящихся на одной дистанции трубопровода (в программе интерпретации координатная сетка по оси абсцисс дублируется значениями углового положения по образующей трубопровода), по оси ординат - время прохождения ультразвуковой волны (соответствует известному В-скан ToFD), по оси аппликат - амплитуда принятых сигналов, замененная 64-мя оттенками серого (соответствует известному В-скан ToFD), которые образуют псевдотрехмерное отображение в программе интерпретации.
Построение CrossB-сканов и В-сканов выполняется на основе осциллограмм, прошедших процедуру выравнивания (синхронизации) осциллограмм по времени прихода LW-волны в двух вариантах. В первом варианте, который используют для анализа внешних дефектов трубопровода (интерпретируют индикации донного сигнала на продольной волне и близко расположенные к ним индикации), начало отсчета времени (нулевое значение) каждой осциллограммы изменяется и устанавливается за 1,0 мкс (значение может быть изменено по выбору оператора) до времени прихода LW-волны, которое определяется как время первого по времени максимума или минимума сигнала (определяет оператор) осциллограммы в стробе, установленного оператором на одном из А-скан ToFD (вид программы интерпретации с отображением одной из осциллограмм). Во втором варианте, который используют для анализа внутренних дефектов трубопровода (интерпретируют индикации LW-волны и близко к ним расположенные), дополнительно к времени прихода LW-волны (определяется аналогично первому варианту) определяется время прихода донного сигнала на продольной волне как время абсолютных минимума или максимума сигнала в стробе, дополнительно установленного оператором на одном из А-скан ToFD (дополнительно к стробированию LW-волны) для определения времени прихода донного сигнала. Для осциллограмм, участвующих в построении CrossB-сканов и В-сканов, выполняется поиск наиболее часто встречающегося значения времени прохождения толщины стенки. Время прохождения толщины стенки определяют как разность отстробированного времени прихода донного сигнала на продольной волне и отстробированного времени прихода LW-волны. В итоге, при построении CrossB-скана по второму варианту начало отсчета времени каждой осциллограммы изменяется и устанавливается за 4,0 мкс (значение может быть изменено по выбору оператора) плюс разность текущего значения времени прохождения толщины стенки, определенного автоматически по текущей осциллограмме с использованием аналогичных установленным оператором стробов, и наиболее часто встречающегося времени прохождения толщины стенки.
Для обеспечения контроля базового материала с поперечно ориентированными дефектами трубопровода оператор выполняет выбор CrossB-сканов в соответствии с толщиной стенки текущей контролируемой трубы трубопровода, а для обеспечения контроля поперечных швов оператор выполняет выбор CrossB-сканов в соответствии с толщиной стенки одной из труб трубопровода, входящих в текущий контролируемый стык (поперечный шов). При выборе CrossB-сканов оператор руководствуется следующими правилами: значение PCS выбранной пары пьезоэлектрического преобразователя ToFD-излучателя и пьезоэлектрического преобразователя ToFD-приемника наиболее соответствует расчетному значению PCS, определенному по текущей толщине стенки (толщина текущей трубы или наибольшая в текущем стыке); кроме этого оператор выбирает CrossB-скан, который содержит индикации LW-волны, донного сигнала на продольной волне и донного сигнала на поперечной волне.
Для обеспечения контроля продольных швов и базового материала с продольно ориентированными дефектами трубопровода оператор выполняет выбор В-сканов в соответствии с толщиной стенки текущей контролируемой трубы трубопровода. При выборе В-сканов оператор руководствуется следующими правилами: значение PCS, выбранной пары пьезоэлектрического преобразователя ToFD-излучателя и пьезоэлектрического преобразователя ToFD-приемника наиболее соответствует расчетному значению PCS, определенному по текущей толщине стенки (толщина текущей трубы или наибольшая в текущем стыке); кроме этого оператор выбирает В-скан, который содержит индикации LW-волны, донного сигнала на продольной волне и донного сигнала на поперечной волне.
Предлагаемая в изобретении схема реализации метода ToFD обеспечивает восстановление времени прихода LW-волны на осциллограммах дальних (по отношению к пьезоэлектрическому преобразователю ToFD-излучателю) пьезоэлектрических преобразователей ToFD-приемников по значениям времени прихода LW-волны на ближних пьезоэлектрических преобразователей ToFD-приемниках. Восстановление осуществляется путем прибавления к времени прихода на ближнем пьезоэлектрическом преобразователе ToFD-приемнике разности времени прихода LW-волны на дальнем пьезоэлектрическом преобразователе ToFD-приемнике, для которого необходимо восстановить время прихода LW-волны, и времени прихода на ближнем пьезоэлектрическом преобразователе ToFD-приемнике. При этом указанная разность может быть определена путем известного расчета по геометрическим параметрам, или определена экспериментально в условиях меньшего затухания ультразвуковой воны, или может быть определена по диагностическим данным соседних блоков или данным этого же блока, где LW-волна на дальнем пьезоэлектрическом преобразователе ToFD-приемнике зарегистрирована.
Предлагаемая в изобретении схема реализации метода ToFD обеспечивает осуществление известного двузонного контроля ToFD и параллельного сканирования, при этом для двузонного контроля ToFD по диагностическим данным первой секции могут использоваться CrossB-сканы; для анализа параллельного сканирования по диагностическим данным первой секции могут использоваться известные В-сканы ToFD, построенные по осциллограммам пьезоэлектрических преобразователей ToFD-приемников первой секции; для двузонного контроля ToFD по диагностическим данным второй секции могут использоваться известные В-сканы ToFD. Для анализа параллельного сканирования по диагностическим данным второй секции могут использоваться ParallB-сканы ToFD. Каждый из трех ParallB-сканов отображает осциллограммы только однотипных пьезоэлектрических преобразователей ToFD-приемников второй секции, а именно: пьезоэлектрических преобразователей ToFD-приемников, расположенных на одинаковом расстоянии относительно пьезоэлектрического преобразователя ToFD-излучателя, при этом построение ParallB-сканов осуществляется в следующих координатах: по оси абсцисс - номера пьезоэлектрических преобразователей ToFD-приемников, находящихся на одной дистанции трубопровода (в программе интерпретации координатная сетка по оси абсцисс дублируется значениями углового положения по образующей трубопровода), по оси ординат - время прохождения ультразвуковой волны (соответствует известному В-скан ToFD), по оси аппликат - амплитуда принятых сигналов, замененная 64-мя оттенками серого (соответствует известному В-скан ToFD), которые образуют псевдотрехмерное отображение в программе интерпретации.
Для подтверждения заявляемого технического результата изобретения заявителем проводились работы по разработке внутритрубного инспекционного прибора, осуществляющего неразрушающий внутритрубный контроль трубопровода с использованием заявляемого изобретения.
На первом этапе разработки внутритрубного инспекционного прибора была применена штатная схема реализации метода ToFD. В соответствии с ней пара пьезоэлектрический преобразователь ToFD-излучатель 1 и пьезоэлектрический преобразователь ToFD-приемник 2 были размещены на жестком блоке. В ходе экспериментов было определено, что при применении пьезоэлектрических преобразователей ToFD с диаметром 3 мм и рабочей частотой 5 МГц для покрытия необходимого диапазона (от 8 до 30 мм) толщин стенки трубопровода 3 необходимо три варианта расположения пьезоэлектрических преобразователей ToFD друг относительно друга (три варианта расстояния PCS между точками ввода). Поэтому при использовании штатной схемы для каждого контролируемого сектора трубопровода, с ориентацией дефектов в первом секторе от 0° до 90° (поперечно ориентированные дефекты) и с ориентацией дефектов во втором секторе от 90° до 180° (продольно ориентированные дефекты), необходимо использование трех жестких блоков (6 блоков на оба сектора), при этом в каждом из них должен быть пьезоэлектрический преобразователь ToFD-излучатель.
Также было определено, что шаг расположения жестких блоков должен быть не менее 3 мм при контроле продольного сварного шва и продольно ориентированных дефектов и не менее 1 мм при контроле поперечного сварного шва и поперечно ориентированных дефектов. При этом общее количество жестких блоков внутритрубного инспекционного прибора для обнаружения поперечно ориентированных дефектов, например, для трубопровода 1020 мм составит около 9420 шт, а общее количество пьезоэлектрических преобразователей ToFD составит около 18849 шт, половина из которых пьезоэлектрические преобразователи ToFD-излучатели (9420 шт).
Также в ходе первого этапа разработки было определено, что каждый жесткий блок должен иметь независимые степени свободы (механически независимый блок), поэтому конструкция секции внутритрубного инспекционного прибора - носителя датчиков (фиг.2) должна иметь свою систему подвеса 4 и прижима к стенке трубы 5 для каждого жесткого блока 6. Размещение такого количества механически независимых жестких блоков, а также включение в состав внутритрубного инспекционного прибора дополнительных, для обеспечения минимальной длины диагностируемого участка, батарейных секций (дополнительных к составу секций известных внутритрубных инспекционных приборов), обеспечивающих энергопотребление 9420 шт пьезоэлектрических преобразователей ToFD-излучателей (величина напряжения импульса возбуждения более 200 В), потребует увеличение длинны внутритрубного инспекционного прибора до размеров, превышающих нормативные размеры при контроле магистральных трубопроводов (ограничение по размеру камер запуска и приема внутритрубного инспекционного прибора), что означает невозможность реализации внутритрубного инспекционного прибора с использованием штатной схемы реализации метода ToFD. В этих условиях также необходимо было учитывать, что на части секций внутритрубного инспекционного прибора - носителей датчиков должны быть размещены пьезоэлектрические преобразователи для измерения толщины стенки (пьезоэлектрический преобразователь WM, каждый из которых является излучателем) в количестве, необходимом для создания журнала раскладки труб с определением углового положения продольного шва и толщин стенки трубных секций.
Также в ходе первого этапа разработки внутритрубного инспекционного прибора при применении штатной схемы реализации метода ToFD было выявлено, что при контроле труб с толщиной стенки более 15 мм и при контроле широких продольных швов не представляется возможным выполнить измерение глубины и глубины залегания дефектов, а также измерение положения индикаций по глубине (положение индикации по отношению к внешней и внутренней стенке трубы в связи с невозможностью выстроить шкалу глубины). Причиной этого является отсутствие регистрации LW-волны (головной волны) или крайне низкая вероятность ее регистрации (нестабильная регистрация на отдельных участках), что не позволяет выполнить известную для анализа диагностических данных ToFD калибровку (для калибровки необходимо время прихода LW-волны, которое меняется в процессе контроля). Отсутствие регистрации LW-волны не связано непосредственно с применением штатной схемы реализации метода ToFD, а связано с тяжелыми условиями проведения внутритрубного контроля (неподготовленная шероховатая поверхность ввода с загрязнениями и отложениями) и высокой интенсивностью падения энергии LW-волны с расстоянием (физическая особенность распространения LW-волны). Но причиной отсутствия возможности выполнить измерение глубины и глубины залегания дефектов в вышеперечисленных случаях является применение штатной схемы реализации метода ToFD. Дополнительно, отсутствие возможности выполнить измерение глубины и глубины залегания дефектов для толщин стенок более 15 мм не позволяет реализовать известный принцип двузонного контроля и параллельного сканирования.
На втором этапе разработки была применена схема осуществления метода ToFD, реализованная в заявляемом изобретении (фиг. 2) с размещением пьезоэлектрических преобразователей ToFD на жестких блоках в количестве четырех штук на один блок таким образом, что среди них только один пьезоэлектрический преобразователь ToFD является излучателем, а остальные три являются приемниками. Эта схема отличается от штатной, в которой применяются один излучающий и один принимающий пьезоэлектрический преобразователь ToFD. Прозвучивание объекта контроля 3 при применении предлагаемого в изобретении способа осуществления метода ToFD должно выполняться с использованием одного пьезоэлектрического преобразователя ToFD-излучателя 1, осуществляющего ввод ультразвуковой волны, и одновременным приемом тремя пьезоэлектрическими преобразователями ToFD-приемниками 2, расположенными на одном жестком блоке оппозитно на разном удалении от излучателя.
Восстановление положения LW-волны по времени становится возможным, поскольку время хода LW-волны между точками ввода (фиг.2) пьезоэлектрических преобразователей ToFD-приемников постоянно (пьезоэлектрические преобразователи ToFD расположены на одном блоке) и может быть прибавлено ко времени прихода регистрируемой LW-волны на ближних к излучателю пьезоэлектрических преобразователей ToFD-приемниках для восстановления ее времени прихода на дальних. Восстановление положения LW-волны по времени дает возможность выполнить калибровку с последующим восстановлением начала шкалы глубины и возможности выполнить измерение глубины и глубины залегания дефектов, что в свою очередь позволяет анализировать данные как ближних, так и дальних пьезоэлектрических преобразователей ToFD-приемников, прозвучивающих одно и то же сечение трубы (ближние и дальние пьезоэлектрические преобразователи ToFD-приемники при контроле продольного шва и продольно ориентированных дефектов выбираются на разных блоках), но раздельно две зоны по глубине: зону ближе к внешней поверхности (дальний пьезоэлектрический преобразователь ToFD-приемник) и зону ближе к внутренней поверхности (ближний пьезоэлектрический преобразователь ToFD-приемник). Такой способ контроля нормативной документацией на ToFD определен как двузонный. Он обеспечивает увеличение вероятности обнаружения, достоверности классификации и точности определения геометрических параметров (в большей степени высоты) дефектов на толстостенных трубах.
В итоге на втором этапе разработки внутритрубного инспекционного прибора с применением предлагаемого в изобретении способа осуществления метода ToFD был достигнут заявляемый технический результат. По сравнению с внутритрубным инспекционным прибором первого этапа разработки, где была применена штатная схема реализации метода ToFD, при идентичности контролируемого объема, обеспечивается:
- уменьшение в полтора раза общего необходимого количества пьезоэлектрических преобразователей ToFD для осуществления контроля с помощью одного прогона внутритрубного инспекционного прибора;
- уменьшение в три раза количества пьезоэлектрических преобразователей ToFD-излучателей, что сокращает энергозатратность контроля в три раза и исключает применение дополнительных батарейных секций на внутритрубном инспекционном приборе;
- уменьшение в три раза количества жестких механически независимых блоков для размещения пьезоэлектрических преобразователей ToFD, что значительно уменьшает габариты носителя датчиков внутритрубного инспекционного прибора, а также уменьшает число секций с носителями датчиков;
- восстановление положения LW-волны при контроле толстостенных труб и труб с увеличенной шириной внутренних валиков усиления продольного шва, что позволяет осуществить измерение глубины дефектов в этих случаях контроля, кроме этого восстановление положения LW-волны при контроле толстостенных труб позволяет выполнить контроль труб с толщиной стенки более 15 мм с применением двузонного контроля, что обеспечивает увеличение вероятности обнаружения, достоверности классификации и точности определения геометрических параметров дефектов на толстостенных трубах. Также восстановление положения LW-волны позволит выполнить двузонный контроль и параллельное сканирование толстостенных труб и труб с увеличенной шириной внутренних валиков усиления сварных швов.
Применительно к примеру, приведенному при описании первого этапа разработки внутритрубного инспекционного прибора, количество блоков внутритрубного инспекционного прибора второго этапа разработки, а также количество пьезоэлектрических преобразователей ToFD-излучателей составит 3140 шт (против 9420 шт на внутритрубном инспекционном приборе первого этапа разработки).
Пьезоэлектрические преобразователи ToFD размещаются на жестких блоках в соответствии со схемой, приведенной на фиг. 2. На носителе датчиков блоки закрепляются в индивидуальном, подвижном, подпружиненном подвесе, обеспечивающем прилегание блока к внутренней поверхности трубы. Конструкция блока обеспечивает его прилегание к внутренней поверхности трубы при расположении сварного шва под блоком. Для контроля поперечного шва и поперечно ориентированных дефектов жесткие блоки располагают с шагом 1 мм по образующей трубы, при этом пьезоэлектрические преобразователи ToFD в блоке размещают так, чтобы линия, проходящая через центры пьезоэлектрических преобразователей ToFD, была перпендикулярна оси трубопровода. А при контроле продольного сварного шва и продольно ориентированных дефектов жесткие блоки располагают с шагом 3 мм по образующей трубы, при этом пьезоэлектрические преобразователи ToFD в блоке размещают так, чтобы линия, проходящая через центры пьезоэлектрических преобразователей ToFD, была параллельна оси трубопровода. Шаг 3 мм выбран исходя из обеспечения необходимой вероятности оптимального расположения пьезоэлектрических преобразователей ToFD относительно продольного сварного шва при движении внутритрубного инспекционного прибора. По этой же причине выбран шаг 3 мм сканирования при контроле поперечного шва и поперечно ориентированных дефектов. Шаг 1 мм выбран исходя из нормативной документации на реализацию метода ToFD. По этой же причине шаг сканирования при контроле продольного шва должен быть 1 мм. Пьезоэлектрические преобразователи ToFD в соответствии с предлагаемым в изобретении способом осуществления метода ToFD (фиг. 2) имеют углы установки α, β, γ, а также размеры А, Б, В, которые должны быть определены по известным формулам в зависимости от требуемого угла ввода, скорости звука в перекачиваемой среде (свойство продукта перекачки), номинального диаметра трубопровода (необходимо учесть, что трубы диаметром менее 520 мм либо не имеют продольного шва, либо его геометрия значительно отличается от швов труб большого диаметра), а также в зависимости от диаграммы направленности применяемых пьезоэлектрических преобразователей ToFD. Для уменьшения объема диагностических данных диапазон времени приема для пьезоэлектрических преобразователей ToFD-приемников может быть установлен пропорционально размерам А, Б, В. При анализе диагностических данных от блоков, ориентированных для контроля продольных швов и продольно ориентированных дефектов (линия, проходящая через центры пьезоэлектрических преобразователей ToFD перпендикулярна оси трубопровода) используются В-сканы одного из пьезоэлектрических преобразователей ToFD-приемников, выбранного оператором для анализа в зависимости от толщины стенки и расположения относительно шва, а при анализе диагностических данных от блоков, ориентированных для контроля поперечных швов и поперечно ориентированных дефектов, оператор осуществляет выбор суммарных В-сканов (CrossB-сканы), которые формируются на основе данных всех пьезоэлектрических преобразователей ToFD-приемников, расположенных на одинаковом расстоянии от пьезоэлектрического преобразователя ToFD-излучателя и находящихся на дистанции трубопровода, выбранной оператором (выбранную дистанцию пьезоэлектрические преобразователи ToFD проходят в разное время). По оси абсцисс таких В-сканов должны быть отложены номера пьезоэлектрических преобразователей ToFD-приемников, последовательно расположенных по образующей (шаг 1 мм). В заголовке В-скана должна отображаться выбранная оператором дистанция. По причине такого формирования В-сканов при контроле поперечного шва шаг сканирования не должен превышать 2…3 мм (время прихода дифракционной волны от дефекта идентично и не влияет на положение индикаций друг относительно друга). Дополнительно на внутритрубном инспекционном приборе должны быть размещены пьезоэлектрические преобразователи для измерения толщины стенки (пьезоэлектрические преобразователи WM), в количестве, необходимом для создания журнала раскладки труб с определением углового положения продольного шва. Обработка данных внутритрубного инспекционного прибора должна начинаться с выбора пьезоэлектрического преобразователя ToFD-приемника: чем больше толщина стенки, тем на большем расстоянии должен быть выбран для анализа пьезоэлектрический преобразователь ToFD-приемник. Кроме этого данные выбранного пьезоэлектрического преобразователя ToFD-приемника должны содержать регистрацию LW-волны, донный сигнал на поперечной волне и донный сигнал на продольной волне. Далее выполняется калибровка (известная, по приведенной выше нормативной документации на ToFD, процедура при известном значении толщины стенки), анализ диагностических данных и измерение дефектов. Текущая толщина стенки может быть определена по дополнительно размещенным на внутритрубном инспекционном приборе пьезоэлектрическим преобразователям WM (Wall Measuremet) измерения толщины стенки или рассчитана по диагностической информации пьезоэлектрического преобразователя ToFD-приемника, где имеются индикации LW-волны и донного сигнала путем расчета по известным размерам А, Б или В с использованием известных формул.
Для восстановления положения сигнала LW-волны по времени на диагностических данных двух дальних пьезоэлектрических преобразователей ToFD-приемниках, расположенных на расстоянии Б и В от пьезоэлектрического преобразователя ToFD-излучателя, необходимо к измеренному (по полученным диагностическим данным) времени прихода LW-волны на ближнем пьезоэлектрическом преобразователе ToFD-приемнике (для пьезоэлектрического преобразователя ToFD-приемника, расположенного на расстоянии В, в качестве ближнего может быть взят пьезоэлектрический преобразователь ToFD-приемник, расположенный на расстоянии А или расстоянии Б в зависимости от наличия регистрации LW-волны на них, прибавить заранее рассчитанное или экспериментально определенное время хода LW-волны от точки ввода ближнего пьезоэлектрического преобразователя ToFD-приемника до точки ввода пьезоэлектрического преобразователя ToFD-приемника, для которого определяется время прихода LW-волны (для пьезоэлектрического преобразователя ToFD-приемника, расположенного на расстоянии В, для расчета может быть взята разность расстояний В и Б или разность В и А, в зависимости от выбранного ближнего пьезоэлектрического преобразователя ToFD-приемника, на котором выполнялось измерение времени прихода LW-волны). Расчет приведен для принимающих пьезоэлектрических преобразователей ToFD-приемников, расположенных на одинаковом расстоянии от поверхности трубы.
Кроме расчета, разность времени прихода LW-волны на ближних и дальних пьезоэлектрических преобразователях ToFD-приемниках может быть экспериментально определена с помощью калибровки на образце трубы диаметром, соответствующем номинальному диаметру трубопровода, путем регистрации LW-волны на дальнем и ближнем пьезоэлектрических преобразователях ToFD-приемниках с последующим определением разницы времени прихода этих сигналов. Для принимающего пьезоэлектрического преобразователя ToFD-приемника, расположенного на расстоянии В, необходимо выполнить две калибровки с определением разницы времени прихода LW-волны этого пьезоэлектрического преобразователя ToFD-приемника и времени прихода LW-волны на принимающем пьезоэлектрическом преобразователе ToFD-приемнике, расположенном на расстоянии Б и А.
Использование: для проведения внутритрубного контроля трубопровода. Сущность изобретения заключается в том, что носитель датчиков выполнен с возможностью установки на внутритрубном инспекционном приборе и имеет множество датчиков, распределенных по его окружности. Указанное множество датчиков представляет собой ультразвуковые пьезоэлектрические преобразователи ToFD, размещенные в жестких блоках, при этом жесткие блоки объединены в две секции внутритрубного инспекционного прибора. При этом пьезоэлектрические преобразователи ToFD размещены на жестких блоках в количестве четырех штук на один блок, один пьезоэлектрический преобразователь ToFD из которых является излучателем, а остальные три являются приемниками, одновременно осуществляющими прием результатов прозвучивания одного зондирующего импульса излучателя, при этом все четыре пьезоэлектрических преобразователя ToFD закреплены в ряд на одной PCS-линии так, что акустические оси всех пьезоэлектрических преобразователей ToFD находятся в одной плоскости. Технический результат: повышение качества внутритрубного контроля. 3 з.п. ф-лы, 3 ил.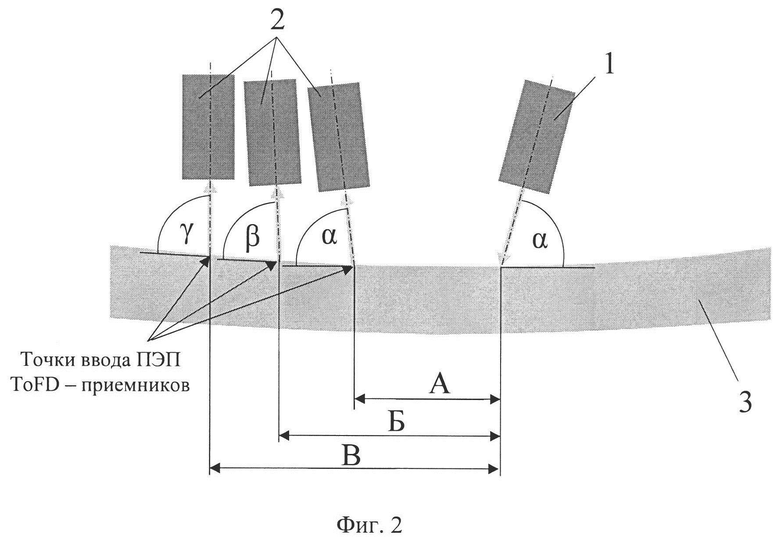
1. Носитель датчиков, выполненный с возможностью установки на внутритрубном инспекционном приборе и имеющий множество датчиков, распределенных по его окружности, причем указанное множество датчиков представляет собой ультразвуковые пьезоэлектрические преобразователи ToFD, размещенные в жестких блоках, при этом жесткие блоки объединены в две секции внутритрубного инспекционного прибора, первая из которых для контроля поперечных сварных швов и базового материала трубопровода с поперечно ориентированными дефектами трубопровода, а вторая для контроля продольных сварных швов и базового материала трубопровода с продольно ориентированными дефектами трубопровода, отличающийся тем, что пьезоэлектрические преобразователи ToFD размещены на жестких блоках в количестве четырех штук на один блок, один пьезоэлектрический преобразователь ToFD из которых является излучателем, а остальные три являются приемниками, одновременно осуществляющими прием результатов прозвучивания одного зондирующего импульса излучателя, при этом все четыре пьезоэлектрических преобразователя ToFD закреплены в ряд на одной PCS-линии так, что акустические оси всех пьезоэлектрических преобразователей ToFD находятся в одной плоскости.
2. Носитель датчиков по п. 1, отличающийся тем, что жесткие блоки в первой и второй секциях закреплены шарнирно с обеспечением прижима блоков к внутренней поверхности трубопровода так, что точки опоры жестких блоков о внутреннюю поверхность трубопровода не меняются во время движения внутритрубного инспекционного прибора по трубопроводу.
3. Носитель датчиков по п. 1, отличающийся тем, что жесткие блоки первой секции внутритрубного инспекционного прибора размещены с шагом не более 1 мм по образующей внутренней поверхности трубы, при этом точки опоры жестких блоков первой секции расположены на передних и задних гранях жестких блоков на оси, параллельной направлению движения внутритрубного инспекционного прибора, а пьезоэлектрические преобразователи ToFD в жестких блоках первой секции ориентированы так, что PCS-линия перпендикулярна образующей трубы и параллельна оси первой секции.
4. Носитель датчиков по п. 1, отличающийся тем, что жесткие блоки второй секции внутритрубного инспекционного прибора размещены с шагом не более 3 мм по образующей внутренней поверхности трубы, при этом точки опоры жестких блоков второй секции расположены на боковых гранях жестких блоков на оси, перпендикулярной направлению движения внутритрубного инспекционного прибора, а пьезоэлектрические преобразователи ToFD в жестких блоках второй секции ориентированы так, что PCS-линия параллельна образующей трубы и перпендикулярна оси второй секции.
| Herbert Willems et al., QUALIFICATION OF A COMBINED ULTRASONIC INSPECTION TOOL FOR DETECTION AND SIZING OF CIRCUMFERENTIAL WELD CRACKS IN OFFSHORE PIPELINES, Proceedings of the 2014 10th International Pipeline Conference | |||
| US 2010199767 A1, 12.08.2010 | |||
| US 5460046 A, 24.10.1995 | |||
| US 5770800 A, 23.06.1998 | |||
| КОМПЛЕКС ДЕФЕКТОСКОПИИ ТЕХНОЛОГИЧЕСКИХ ТРУБОПРОВОДОВ | 2012 |
|
RU2516364C1 |
| НОСИТЕЛЬ ДАТЧИКОВ ДЛЯ ВНУТРИТРУБНОГО ИНСПЕКЦИОННОГО СНАРЯДА (ВАРИАНТЫ) | 2002 |
|
RU2204113C1 |

