Заявленное техническое решение относится к измерительной технике и может быть использовано для измерения положения полого ротора, а именно его угловых перемещений - поворотов с помощью преобразователя линейного перемещения индукционного типа.
Известен индукционный датчик положения, описанный в патенте на изобретение РФ №2454625. Он содержит неподвижную часть и подвижную часть, установленную с возможностью перемещения относительно неподвижной части с одной степенью свободы. Неподвижная и подвижная части датчика выполнены из диэлектрического материала и обращены друг к другу сторонами с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности, соответственно с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом. Подвижная часть датчика установлена с возможностью перемещения относительно неподвижной части вдоль активных длинных проводников зигзагоподобных прямоугольных катушек. Неподвижная часть индукционного датчика положения может содержать две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками. Данное изобретение решает задачу расширения диапазона измерений, упрощение конструкции датчика, повышение точности измерений линейных перемещений.
Также известен индукционный датчик положения, описанный в патенте на полезную модель РФ №159522, содержащий неподвижную и подвижную пластины, выполненные из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности с пассивными короткими и активными длинными проводниками, которые взаимно параллельны и расположены с одинаковым шагом.
Недостатком указанных аналогов является то, что как к неподвижной его части, так и к подвижной, подведены гибкие провода, что существенно снижает надежность такого датчика, особенно на сравнительно больших длинах измерительного участка.
Прототипом заявленного технического решения является индукционный датчик положения, описанный в патенте на изобретение РФ №2507474. Он содержит неподвижную и подвижную части с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности, которые взаимно параллельны и расположены с одинаковым шагом, также подвижная часть установлена с возможностью перемещения относительно неподвижной части с одной степенью свободы. Кроме того, прототип содержит дополнительную вторую, аналогичную первой, пару плоских катушек и с длинной неподвижной и короткой подвижной катушками, причем длина неподвижной катушки должна быть такой, чтобы при максимальном смещении короткая подвижная катушка не выходила за пределы неподвижной катушки, подвижные плоские катушки и части индуктивного датчика разделены и жестко связаны между собой, ко второй неподвижной длинной катушке подведено питание от генератора синусоидального сигнала, подвижные катушки обеих пар соединены между собой проводниками. Неподвижная часть первой пары плоских катушек индукционного датчика положения может содержать две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками неподвижной части.
В прототипе решена задача существенного повышения надежности работы индукционного датчика положения из-за использования вместо гибких проводов подвижной части датчика второй пары плоских катушек, служащими индукционным трансформатором для питания подвижной части датчика (фактически в датчике исключены гибкие подвижные проводники).
Его недостатком является то, что он предназначен для измерения длин до нескольких десятков сантиметров, и имеет ограничения по длине рабочего диапазона измерения. При увеличении длины измерения (увеличения длины проводников катушек) в катушках самого датчика увеличиваются потери, из-за возрастания реактивного и активного сопротивления проводников, которые приводят к увеличению погрешности измерений.
Кроме того, индукционные датчики перемещения, описанные и в прототипе, и в аналогах, предназначены только для измерения линейных перемещений, при этом небольшой длины (порядка десятка сантиметров), и не могут быть применены для измерения угловых перемещений.
Задачей, на решение которой направлено заявленное решение является создание индукционного датчика положения с увеличенным диапазоном длины измерения, который может использоваться для измерения угловых перемещений.
Данная задача решается конструкцией индукционного датчика положения который содержит неподвижную и подвижную части с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности, которые взаимно параллельны и расположены с одинаковым шагом, и подвижная часть установлена с возможностью перемещения относительно неподвижной части с одной степенью свободы, при этом, новым является то, что зигзагоподобные прямоугольные катушки индуктивности подвижной и неподвижной частей датчика сформированы в шесть уровней: первый уровень из первичных и вторичных катушек индукционных трансформаторов, которые питают Sin и Cos катушки, второй уровень - из первичных и вторичных Sin катушек, третий уровень - из первичных и вторичных Cos катушек, четвертый уровень - из первичных и вторичных идентификационных катушек, смещенных вправо от центра платы, пятый уровень - из первичной идентификационной катушки, смещенной влево и вторичной идентификационной катушки, смещенной вправо от центра платы, шестой уровень - из первичных и вторичных катушек индукционных трансформаторов, которые питают идентификационные катушки.
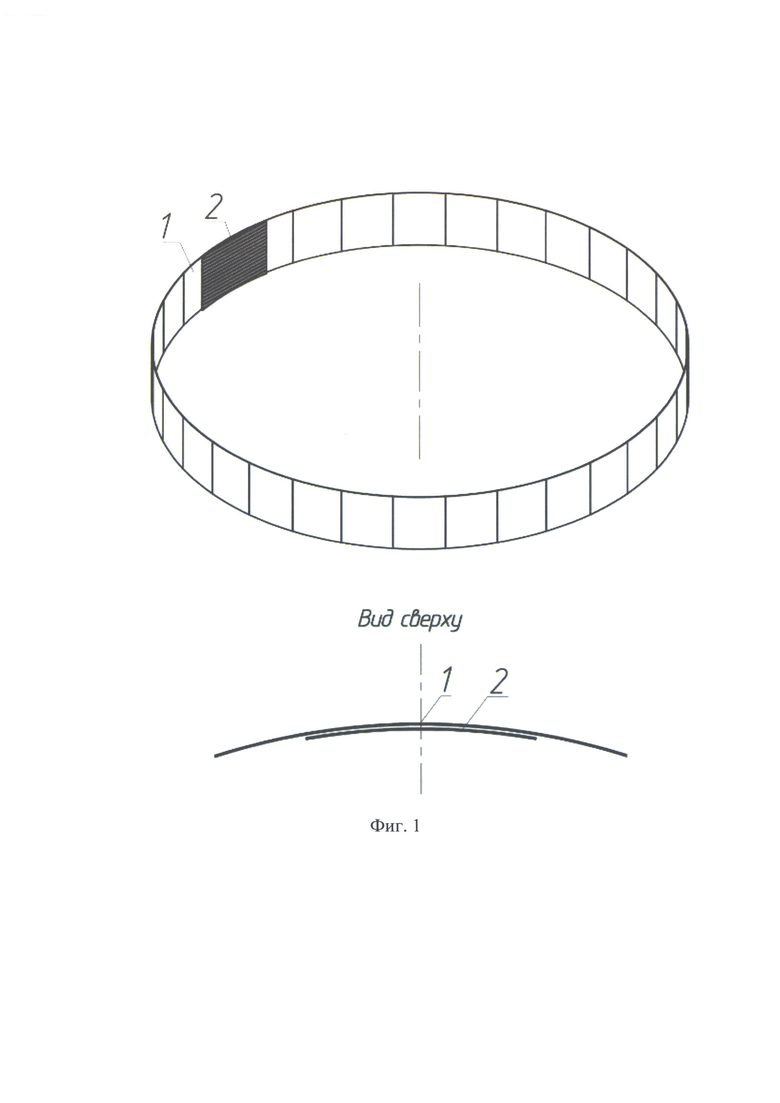
Технический результат достигается тем, что существенное увеличение измеряемой длины индукционного датчика положения достигается расположением в ряд по всему диаметру необходимого количества однотипных секций второй части датчика, а именно, закрепленных на нем пассивных печатных плат с выполненными на них индукционными катушками различного назначения.
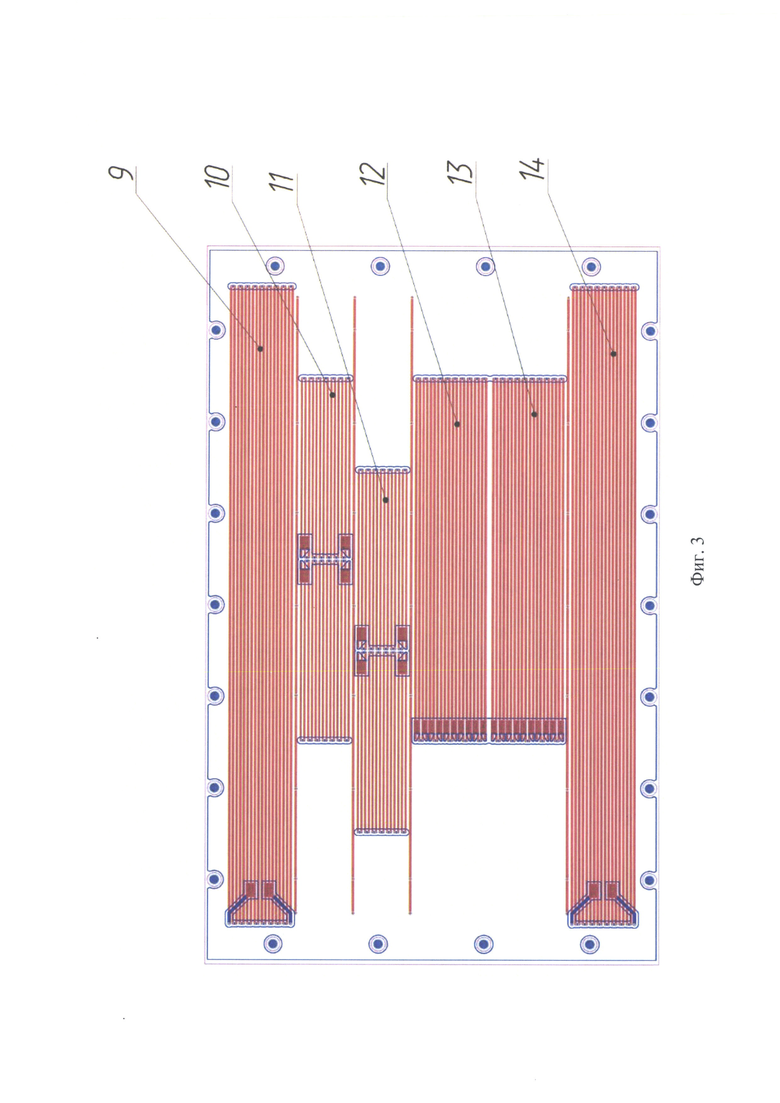
Заявленное решение иллюстрируют графические материалы - фиг. 1-3, где на фиг. 1 изображен общий вид расположения неподвижных и подвижных частей датчика, на фиг. 2 - шесть уровней печатных зигзагоподобных прямоугольных катушек индуктивности подвижной части, а на фиг. 3 - шесть уровней печатных зигзагоподобных прямоугольных катушек индуктивности неподвижной части.
Индукционный датчик положения содержит:
1 - подвижная пассивная плата,
2 - неподвижная активная плата,
3 - 1 уровень подвижной пассивной платы,
4 - 2 уровень подвижной пассивной платы,
5 - 3 уровень подвижной пассивной платы,
6 - 4 уровень подвижной пассивной платы,
7 - 5 уровень подвижной пассивной платы,
8 - 6 уровень подвижной пассивной платы,
9 - 1 уровень неподвижной активной платы,
10 - 2 уровень неподвижной активной платы,
11 - 3 уровень неподвижной активной платы,
12 - 4 уровень неподвижной активной платы,
13 - 5 уровень неподвижной активной платы,
14 - 6 уровень неподвижной активной платы.
Индукционный датчик положения работает следующим образом:
Первичная обмотка индукционного трансформатора, находящаяся на первом уровне неподвижной активной платы, формирует переменное магнитное поле, которое улавливается вторичными катушками индукционного трансформатора, находящиеся на первом уровне подвижной пассивной платы, которые питают Sin и Cos катушки, находящиеся на втором и третьем уровнях пассивной подвижной платы. В них происходит индуцирование переменного магнитного поля, которое улавливается вторичными Sin и Cos катушками, находящимися на втором и третьем уровне активной неподвижной платы, при этом подвижная часть установлена с возможностью перемещения относительно неподвижной части с одной степенью свободы.
На четвертом и пятом уровнях находятся катушки, которые улавливают переменное магнитное поле, которое промодулировано кодом (номером) от идентификационных катушек, находящихся на четвертом и пятом уровнях пассивной подвижной платы, питающиеся от вторичных катушек индукционного трансформатора, находящегося на шестом уровне и которые поглощают переменное магнитное поле, генерируемое первичной катушкой индукционного трансформатора, находящейся на шестом уровне активной неподвижной платы.
Таким образом, предложенное техническое решение позволило увеличить диапазон длины измерения, который может использоваться для измерения угловых перемещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2011 |
|
RU2454625C1 |
| Индукционный датчик углового положения | 2017 |
|
RU2655632C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2012 |
|
RU2507474C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2012 |
|
RU2502046C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2570232C1 |
| ИНДУКЦИОННЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР | 2014 |
|
RU2584010C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК СИЛЫ | 2011 |
|
RU2472122C1 |
| Индуктивный датчик микроперемещений ротора активного магнитного подвеса | 2024 |
|
RU2834196C1 |
| Двухканальный индукционно-радиоволновый металлоискатель с двухуровневым поисковым элементом | 2024 |
|
RU2835380C1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ЛЕКАРСТВЕННЫХ ПРЕПАРАТОВ | 2018 |
|
RU2773485C2 |

Изобретение относится к измерительной технике и может быть использовано для измерения положения полого ротора, а именно его угловых перемещений – поворотов, с помощью преобразователя линейного перемещения индукционного типа. Сущность заявленного решения заключается в том, что индукционный датчик положения содержит неподвижную и подвижную части с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности, которые взаимно параллельны и расположены с одинаковым шагом, подвижная часть установлена с возможностью перемещения относительно неподвижной части с одной степенью свободы. Данные зигзагоподобные прямоугольные катушки индуктивности подвижной и неподвижной частей датчика сформированы в шесть уровней: первый уровень из первичных и вторичных катушек индукционных трансформаторов, которые питают Sin и Cos катушки, второй уровень - из первичных и вторичных Sin катушек, третий уровень - из первичных и вторичных Cos катушек, четвертый уровень - из первичных и вторичных идентификационных катушек, смещенных вправо от центра платы, пятый уровень - из первичной идентификационной катушки, смещенной влево, и вторичной идентификационной катушки, смещенной вправо от центра платы, шестой уровень - из первичных и вторичных катушек индукционных трансформаторов, которые питают идентификационные катушки. Техническим результатом при реализации заявленного решения является создание индукционного датчика положения с увеличенным диапазоном длины измерения, который может использоваться для измерения угловых перемещений. 3 ил.
Индукционный датчик положения, содержащий неподвижную и подвижную части с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности, которые взаимно параллельны и расположены с одинаковым шагом, подвижная часть установлена с возможностью перемещения относительно неподвижной части с одной степенью свободы, отличающийся тем, что зигзагоподобные прямоугольные катушки индуктивности подвижной и неподвижной частей датчика сформированы в шесть уровней: первый уровень из первичных и вторичных катушек индукционных трансформаторов, которые питают Sin и Cos катушки, второй уровень - из первичных и вторичных Sin катушек, третий уровень - из первичных и вторичных Cos катушек, четвертый уровень - из первичных и вторичных идентификационных катушек, смещенных вправо от центра платы, пятый уровень - из первичной идентификационной катушки, смещенной влево, и вторичной идентификационной катушки, смещенной вправо от центра платы, шестой уровень - из первичных и вторичных катушек индукционных трансформаторов, которые питают идентификационные катушки.
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2012 |
|
RU2507474C1 |
| ПОВОРОТНЫЙ ИНДУКЦИОННЫЙ ДАТЧИК | 0 |
|
SU381891A1 |
| СПОСОБ КОНТРОЛЯ ВРЕМЕННЫХ ПАРАМЕТРОВ РЕЛЕ | 0 |
|
SU210943A1 |
| US 6922051 B2, 26.07.2005 | |||
| US 6532824 B1, 18.03.2003 | |||
| US 10444001 B2, 15.10.2019. | |||
