Изобретение относится к области машиностроения и может быть использовано на площадках ремонтных предприятий при проверке технического состояния агрегатов.
Известен способ балансировки сборных роторов (патент RU 2372594 С1), при котором балансировку ротора проводят следующим образом: балансируют отдельно вал, затем ротор с установленными на нем элементами и окончательно корректируют дисбаланс при вращении ротора от электродвигателя в собственных опорах.
Недостатком данного способа является трудоемкость и продолжительность процесса балансировки во времени.
Известен способ оценки дисбаланса ротора (патент RU 2010205), принятый нами за прототип, заключающийся в том, что ротор устанавливают на опоры, вращают его и измеряют с помощью виброизмерительных преобразователей параметры вибрации, по которым оценивают неуравновешенность (величину дисбаланса начального или остаточного), причем один из виброизмерительных преобразователей устанавливают вблизи первой плоскости коррекции, а о неуравновешенности судят с учетом измерения сдвига фаз выходных сигналов виброизмерительных преобразователей, зарегистрированных на рабочей частоте вращения ротора
Недостатком данного способа является то, что измерения сигналов с виброизмерительных преобразователей проводят на рабочей частоте вращения ротора, что при определенных значениях этой частоты, массы ротора и его неуравновешенности может привести к значительным инерционным нагрузкам на опоры ротора, а это небезопасно для прочности конструктивных элементов опоры.
Целью изобретения является повышение безопасности и сокращение длительности балансировки ротора, путем разработки способа балансировки ротора с использованием алгоритма плавного разгона.
Ряд номинальных частот вращения асинхронных электродвигателей 300, 375, 500, 600, 750, 1000, 1500, 3000 мин-1 (ГОСТ 10683), примененный в способе балансировки ротора с использованием алгоритма плавного разгона, полностью охватывает рабочий диапазон вращения роторных машин, приводимых во вращение с помощью асинхронных электродвигателей.
Технический результат в заявленном способе балансировки ротора достигается тем, что осуществляют плавный разгон ротора с начальной частоты вращения до номинальной с непрерывным контролем параметров вибрации, сравнивают полученные значения с пороговыми: если полученные значения параметров вибрации превышают пороговые, то разгон ротора прекращают на частоте обнаруженного дисбаланса, минимизируют дисбаланс путем определения угла установки корректирующих масс с дальнейшей корректировкой масс, и если после минимизации дисбаланса значения параметров вибрации не превышают пороговые и не достигнута предельная частота вращения, то разгон ротора продолжают с контролем параметров вибрации, иначе процесс балансировки останавливают.
Технический результат достигается также и тем, что разгон ротора осуществляют дискретно по частотам из ряда номинальных частот вращения асинхронных электродвигателей 300, 375, 500, 600, 750, 1000, 1500, 3000 мин-1.
Технический результат достигается также и тем, что всякий раз по измеренным параметрам вибрации восстанавливают зависимость их от частоты вращения и следующую частоту для разгона выбирают максимальную из последующих в ряду номинальных частот вращения асинхронных электродвигателей 300, 375, 500, 600, 750, 1000, 1500, 3000 мин-1, при которой прогноз значений параметров вибрации по восстановленной зависимости не превышает порог ТПМ (требует принятия мер).
Технический результат достигается также и тем, что прогноз значений параметров вибрации определяют по параметрам вибрации, измеренным ранее, с использованием линейной зависимости значений параметров вибрации от частоты вращения.
Анализ отличительных признаков заявленного способа балансировки ротора показал, что:
- непрерывный контроль параметров вибрации и прекращение разгона ротора в случае превышения пороговых значений параметров вибрации обеспечивают безопасность путем исключения воздействий значительных инерционных нагрузок на подшипниковые опоры ротора;
- разгон осуществляют плавно для того, чтобы обеспечить заданную ошибку измерения параметров вибрации из-за изменения частоты вращения ротора в пределах регистрируемых временных реализаций виброакустического сигнала в процессе разгона, и тем самым обеспечивают безопасность балансировки ротора;
- дискретный разгон ротора по частотам из ряда номинальных частот вращения асинхронных электродвигателей 300, 375, 500, 600, 750, 1000, 1500, 3000 мин-1 с контролем параметров вибрации позволяет упростить процедуру измерения и сократить время балансировки ротора;
- выбор частоты разгона ротора каждый раз как максимальной из последующих в ряду номинальных частот вращения асинхронных электродвигателей 300, 375, 500, 600, 750, 1000, 1500, 3000 мин-1, при которой прогноз (расчет) значений параметров вибрации по восстановленной зависимости параметров от частоты вращения не превышает порог ТПМ (требует принятия мер), позволяет сократить время балансировки ротора;
- прогноз (расчет) значений параметров вибрации, выполненный по параметрам вибрации, измеренным ранее, с использованием линейной зависимости значений параметров вибрации от частоты вращения, сокращает длительность балансировки благодаря минимальному количеству измерений (два) для построения прогноза. Допустимость применения линейной зависимости вместо параболической также подтверждена экспериментальными исследованиями [1].
Таким образом, совместное применение отличительных признаков в способе балансировки ротора с использованием алгоритма плавного разгона обеспечивает безопасность и сокращает длительность балансировки ротора.
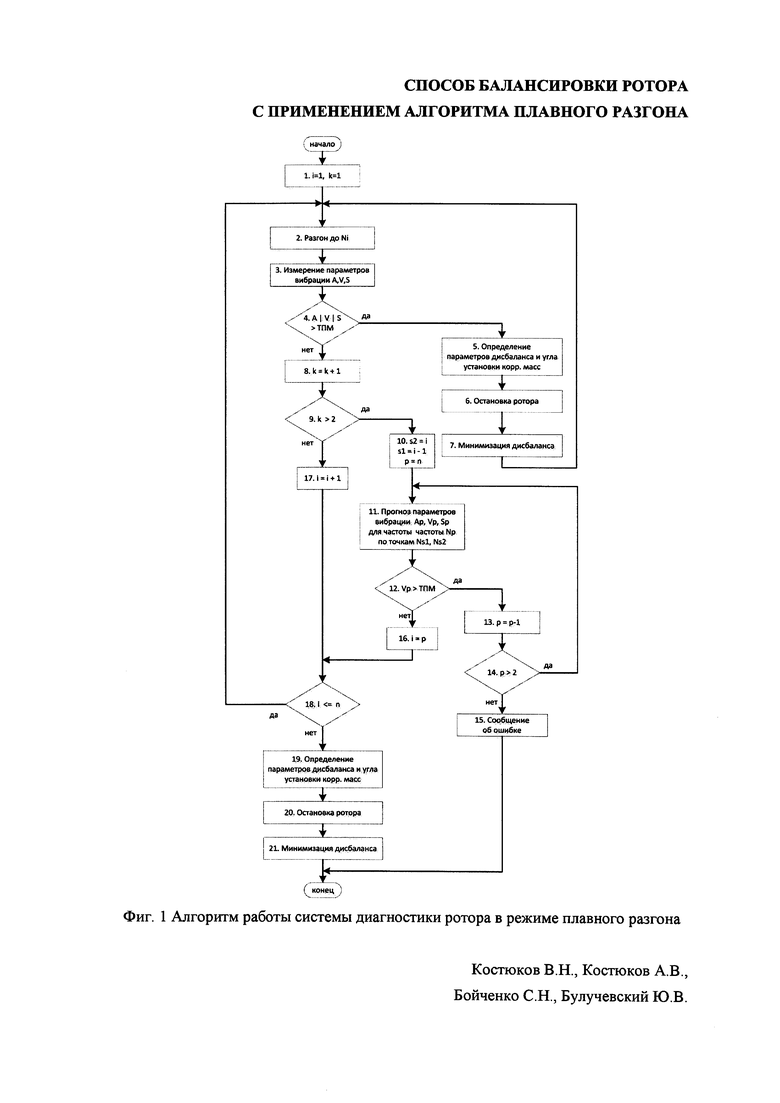
Сущность способа балансировки ротора поясняется алгоритмом (фиг. 1).
В качестве примера реализации способа рассмотрен алгоритм балансировки ротора консольного насоса.
Корпус консольного насоса в сборе с ротором устанавливают на приводе вращения, монтируют на опорах виброизмерительные преобразователи, затем запускают плавный разгон ротора, прогнозируют (рассчитывают) параметры вибрации на номинальной частоте вращения ротора, определяют величину остаточного дисбаланса и угол установки корректирующих масс, при этом:
- устанавливают начальные значения текущего номера частоты i=1 в ряду номинальных частот вращения асинхронного электродвигателя и номера числа начальных измерений k=1 (1);
- разгоняют ротор до частоты вращения Ni (2);
- в процессе разгона контролируют частоту вращения ротора, при достижении значения заданной частоты вращения производят измерение параметров вибрации: средних квадратических значений виброускорения А, виброскорости V и виброперемещения S (3);
- сравнивают полученные значения с пороговыми уровнями ТПМ (требует принятия мер) (4);
- если хотя бы одно из значений параметров вибрации превышает уровень ТПМ, то определяют параметры дисбаланса и угол установки корректирующих масс (5), останавливают ротор (6), минимизируют дисбаланс путем установки корректирующих грузов известной массы (7), после чего повторяют разгон до частоты Ni (2);
- если в результате сравнения (4) значения параметров вибрации не превышают уровня ТПМ, то увеличивают на единицу значение номера числа начальных измерений k (8) и сравнивают его со значением 2 (9);
- если k≤2, то увеличивают на единицу значение номера текущей частоты вращения i (17), сравнивают это значение с номером последнего значения n (18) и если i<=n, то переходят к разгону ротора до значения Ni (2), если i>n, то алгоритм заканчивает работу;
- если в результате сравнения (9) значение числа начальных измерений k превысило 2, то начинают процедуру прогноза путем установки номера прогнозируемой частоты ряда р на последнее значение ряда n, устанавливают номера двух начальных точек для вычисления прогноза, s1 и s2 (10) и производят прогноз (расчет) значений параметров вибрации для частоты Np (11), которые определяют по параметрам вибрации, измеренным ранее на частотах Ns1 и Ns2, с использованием линейной зависимости значений параметров вибрации от частоты вращения.
Расчет ведут по формуле:
Ap=А1+(А2-A1)/(Ns2-Ns1)⋅Np;
Vp=V1+(V2-V1)/(Ns2-Ns1)⋅Np;
Sp=S1+(S2-S1)/(Ns2-Ns1)⋅Np,
где Ap (Vp, Sp) - прогнозируемые среднеквадратические значения виброускорения (виброскорости, виброперемещения);
Np - частота вращения, для которой производится прогноз параметров;
Ns1 - начальная частота вращения ротора из ряда номинальных частот;
Ns2 - последующая за Ns1 частота вращения ротора;
A1 (V1, S1) - среднее квадратическое значение виброускорения (виброскорости, виброперемещения) при частоте вращения ротора N1;
А2 (V2, S2) - среднее квадратическое значение виброускорения (виброскорости, виброперемещения) при частоте вращения ротора N2;
Np - частота вращения, для которой производится прогноз параметров;
- если в результате сравнения (12) прогнозируемые значения хотя бы одного из параметров вибрации А, V, S для частоты вращения ротора Np превышают уровень ТПМ, то уменьшают на единицу значение номера прогнозируемой частоты ряда р (13), и если его значение не уменьшилось до 2 (14), то повторяют прогноз параметров вибрации для предыдущей частоты ряда Np (11);
- если значение номера прогнозируемой частоты ряда достигает 2, то происходит окончание работы алгоритма из-за возникшей ошибки с выводом соответствующего сообщения (15);
- если в результате сравнения (12) прогнозируемые значения всех параметров вибрации А, V, S для частоты вращения ротора Np не превышают уровень ТПМ, то устанавливают номер частоты вращения i в значение номера частоты прогноза р (16), сравнивают это значение с номером последнего значения n (18) и, если текущий номер частоты вращения i меньше или равен номеру последнего значения n, то переходят к разгону ротора до значения Ni (2), если i>n, то переходят к заключительной балансировке на номинальной частоте вращения, при которой определяют параметры дисбаланса и угол установки корректирующих масс (19), останавливают ротор (20), минимизируют дисбаланс путем установки корректирующих масс (21), вновь запускают ротор на номинальной частоте вращения, определяют параметры остаточного дисбаланса (22), после чего алгоритм заканчивает работу.
В качестве примера исполнения способа рассмотрен процесс балансировки консольного насоса с помощью системы КОМПАКС®-РПМ (далее "система").
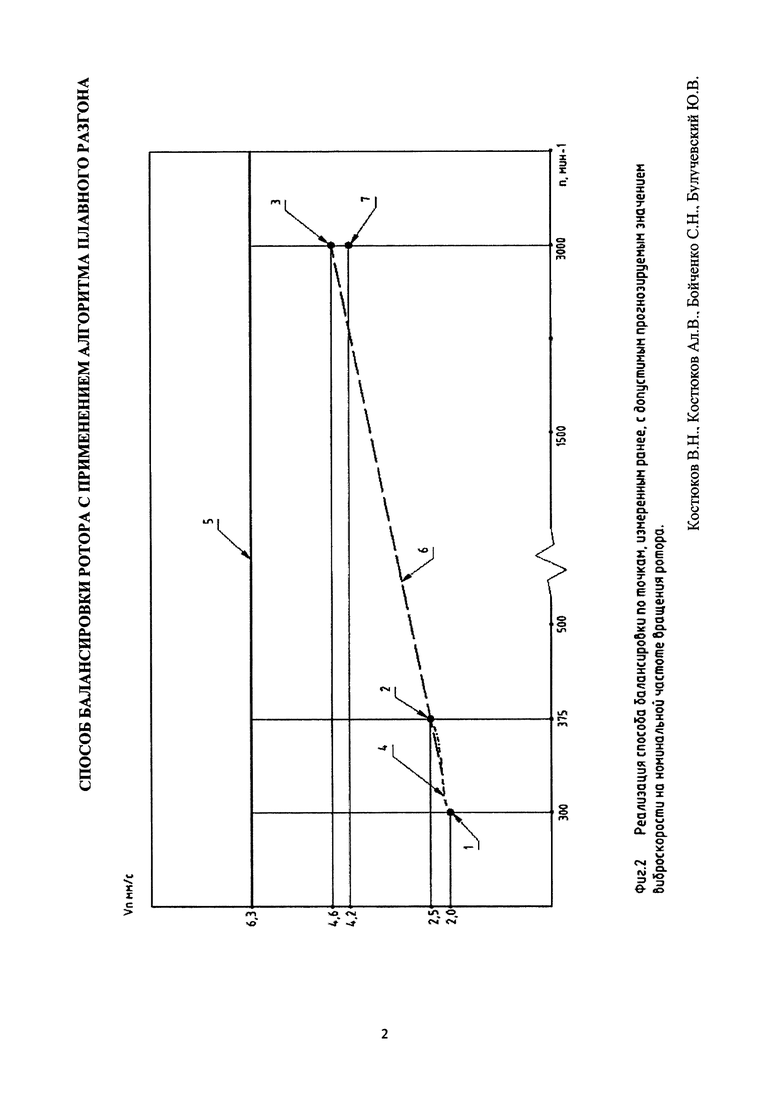
Пример 1 (фиг. 2). Насос установили и закрепили на приводе системы, произвели разгон ротора до начальной частоты 300 мин-1 и измерили параметр вибрации, например виброскорости (1), полученное значение не превысило пороговое (5), произвели разгон ротора до следующей частоты 375 мин-1 и полученное значение (2) вновь не превысило пороговое значение (5). По измеренным значениям восстановили зависимость виброскорости от частоты вращения (4), выполнили прогноз для номинальной частоты 3000 мин-1 (6) и получили значение (3), не превышающее пороговое (5), после чего произвели разгон ротора до номинальной частоты 3000 мин-1 и измерили значение виброскорости (7), которое может отличаться от прогнозируемого (3), определили параметры дисбаланса, остановили ротор, произвели корректировку масс, вновь запустили ротор и определили величину остаточного дисбаланса, после чего балансировку завершили.
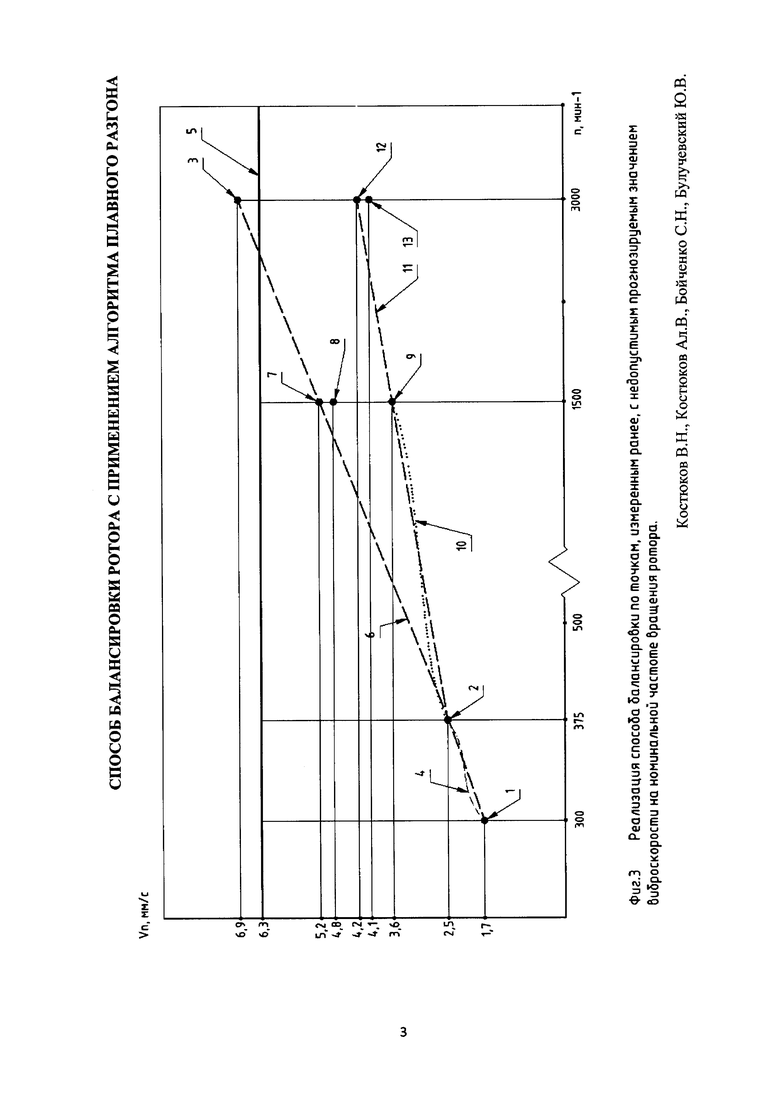
Пример 2 (фиг. 3). Насос установили и закрепили на приводе системы, произвели разгон ротора до начальной частоты 300 мин-1 и измерили значение виброскорости (1), полученное значение не превысило пороговое (5), произвели разгон ротора до следующей частоты 375 мин-1, и полученное значение (2) вновь не превысило пороговое (5). По измеренным значениям восстановили зависимость виброскорости от частоты вращения (4), выполнили прогноз для номинальной частоты 3000 мин-1 (6) и получили значение (3), превышающее пороговое (5), прогноз выполнили для последующей максимальной частоты в ряду номинальных частот - 1500 мин-1, и полученное прогнозируемое значение виброскорости (7) не превысило пороговое (5), после чего произвели разгон до частоты 1500 мин-1, измерили значение виброскорости (8), которое может отличаться от прогнозируемого (7), определили величину дисбаланса, остановили ротор и произвели корректировку масс (9). По измеренным значениям виброскорости на частотах 375 мин-1 и 1500 мин-1 восстановили зависимость значений виброскорости от частоты вращения (10), выполнили прогноз для номинальной частоты 3000 мин-1 (11) и получили значение (12), не превышающее пороговое (5), после чего произвели разгон ротора до номинальной частоты 3000 мин-1, измерили значение виброскорости (13), которое может отличаться от прогнозируемого (12), определили параметры дисбаланса, остановили ротор, произвели корректировку масс, вновь запустили ротор на номинальной частоте вращения и определили величину остаточного дисбаланса, после чего балансировку завершили.
Таким образом, предлагаемый способ балансировки ротора обеспечивает повышение безопасности за счет плавного разгона ротора с прогнозом значений параметров вибрации, не превышающих порог ТПМ, что исключает воздействие на опоры качения повышенных инерционных нагрузок вибрации и повреждение конструктивных элементов опор, а также позволяет снизить время процесса балансировки путем использования дискретного выбора разгонной частоты.
Литература
1. Исследование зависимости параметров вибрации, возникающей в подшипниковых узлах роторных агрегатов, от частоты вращения вала / В.Н. Костюков, А.В. Зайцев, А.О. Тетерин // Техника и технология нефтехимического и нефтегазового производства: Материалы 7-й международной научно-технической конференции / Омск: Изд-во ОмГТУ, 2017.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАШИН ПО КОСВЕННЫМ ПРИЗНАКАМ | 2016 |
|
RU2610366C1 |
| СПОСОБ ДИАГНОСТИЧЕСКОГО МОНИТОРИНГА РОТОРНЫХ МЕХАНИЗМОВ | 2016 |
|
RU2646207C1 |
| СПОСОБ ДИАГНОСТИКИ И ОЦЕНКИ ВИБРОАКТИВНОСТИ СТАНКОВ, РАБОТАЮЩИХ С ЛЕЗВИЙНЫМ ИНСТРУМЕНТОМ | 2006 |
|
RU2332652C1 |
| СПОСОБ ВИБРОДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОРШНЕВЫХ МАШИН ПО СПЕКТРАЛЬНЫМ ИНВАРИАНТАМ | 2007 |
|
RU2337341C1 |
| СПОСОБ ДИАГНОСТИКИ И ПРОГНОЗИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАШИН ПО ВИБРАЦИИ КОРПУСА | 1996 |
|
RU2103668C1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 1994 |
|
RU2046310C1 |
| Способ динамической балансировки ротора в двух плоскостях коррекции | 2022 |
|
RU2790897C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ПРЕИМУЩЕСТВЕННО КАРДАННОГО МЕХАНИЗМА МАШИНЫ | 1995 |
|
RU2109260C1 |
| СПОСОБ ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ МАШИН | 2006 |
|
RU2322666C1 |
| Способ и система вибромониторинга промышленной безопасности динамического оборудования опасных производственных объектов | 2018 |
|
RU2687848C1 |
Изобретение относится к области машиностроения и может быть использовано на площадках ремонтных предприятий при проверке технического состояния агрегатов. Реализуя способ, осуществляют плавный разгон ротора с начальной частоты вращения до номинальной с непрерывным контролем параметров вибрации, сравнивают полученные значения с пороговыми. Если полученные значения параметров вибрации превышают пороговые, то разгон ротора прекращают на частоте обнаруженного дисбаланса, минимизируют дисбаланс путем определения угла установки корректирующих масс с дальнейшей корректировкой масс. Если после минимизации дисбаланса значения параметров вибрации не превышают пороговые и не достигнута предельная частота вращения, то разгон ротора продолжают с контролем параметров вибрации, иначе процесс балансировки останавливают. Технический результат заключается в повышении безопасности и сокращении времени процесса балансировки ротора. 3 з.п. ф-лы, 3 ил. 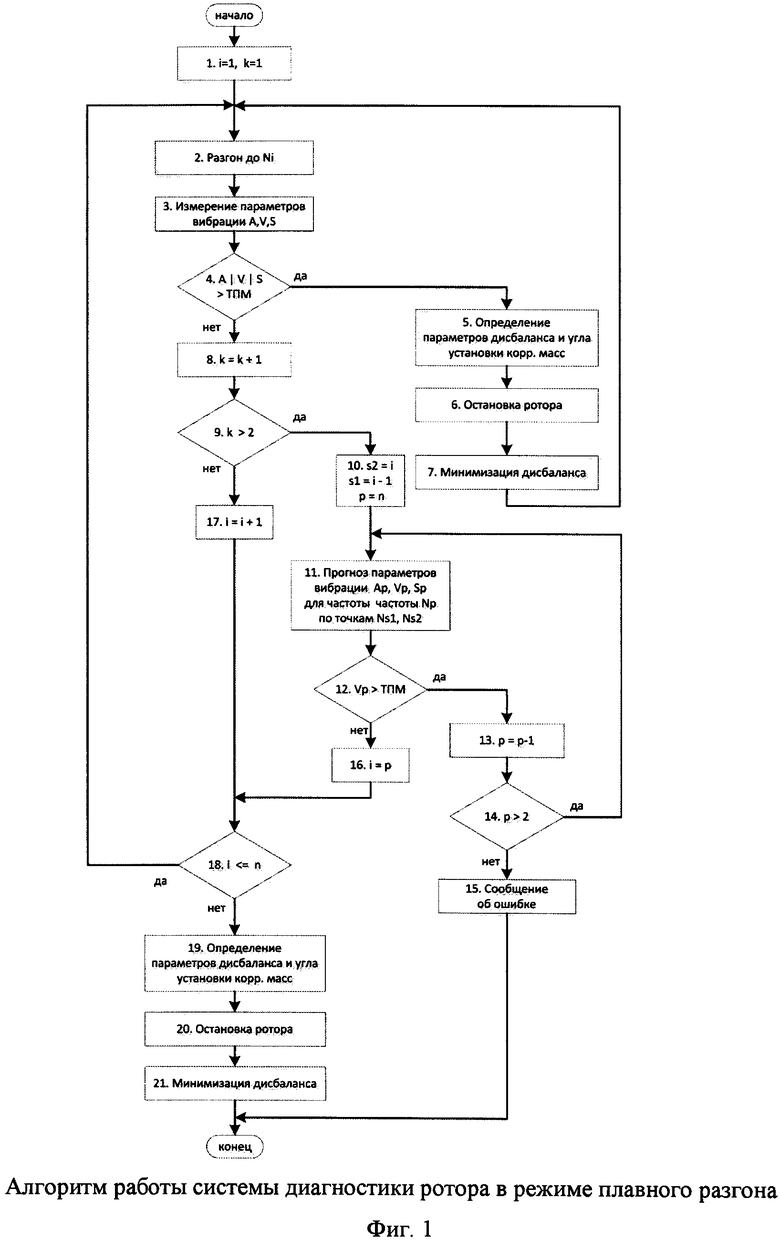
1. Способ балансировки ротора, заключающийся в том, что ротор вращают асинхронным электродвигателем в собственных опорах и измеряют с помощью виброизмерительных преобразователей параметры вибрации, по которым оценивают неуравновешенность, отличающийся тем, что осуществляют плавный разгон ротора с начальной частоты вращения до номинальной с непрерывным контролем параметров вибрации, сравнивают полученные значения с пороговыми: если полученные значения параметров вибрации превышают пороговые, то разгон ротора прекращают на частоте обнаруженного дисбаланса, минимизируют дисбаланс путем определения угла установки корректирующих масс с дальнейшей корректировкой масс, и если после минимизации дисбаланса значения параметров вибрации не превышают пороговые и не достигнута предельная частота вращения, то разгон ротора продолжают с контролем параметров вибрации, иначе процесс балансировки останавливают.
2. Способ балансировки ротора по п. 1, отличающийся тем, что разгон ротора осуществляют дискретно по частотам из ряда номинальных частот вращения асинхронных электродвигателей 300, 375, 500, 600, 750, 1000, 1500, 3000 мин-1.
3. Способ балансировки ротора по п. 2, отличающийся тем, что всякий раз по измеренным параметрам вибрации восстанавливают зависимость их от частоты вращения и следующую частоту для разгона выбирают максимальную из последующих в ряду номинальных частот вращения асинхронных электродвигателей 300, 375, 500, 600, 750, 1000, 1500, 3000 мин-1, при которой прогноз значений параметров вибрации по восстановленной зависимости не превышает порог ТПМ (требует принятия мер).
4. Способ балансировки ротора по п. 3, отличающийся тем, что прогноз значений параметров вибрации определяют по параметрам вибрации, измеренным ранее, с использованием линейной зависимости значений параметров вибрации от частоты вращения.
| СПОСОБ ОЦЕНКИ ДИСБАЛАНСА РОТОРА | 1989 |
|
RU2010205C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2544359C2 |
| Способ балансировки ротора | 1987 |
|
SU1464093A1 |
| СПОСОБ БАЛАНСИРОВКИ ГИБКИХ РОТОРОВ | 2009 |
|
RU2399428C1 |

