1, 1Изобретение относится к машиностроению и может быть использовано для балансировки ротора на магнитных опорах.
Цель изобретения - повьшение точ- нос ти и чувствительности за счет исключения промежуточных звеньев колебательной системы и изменения демпфирования.
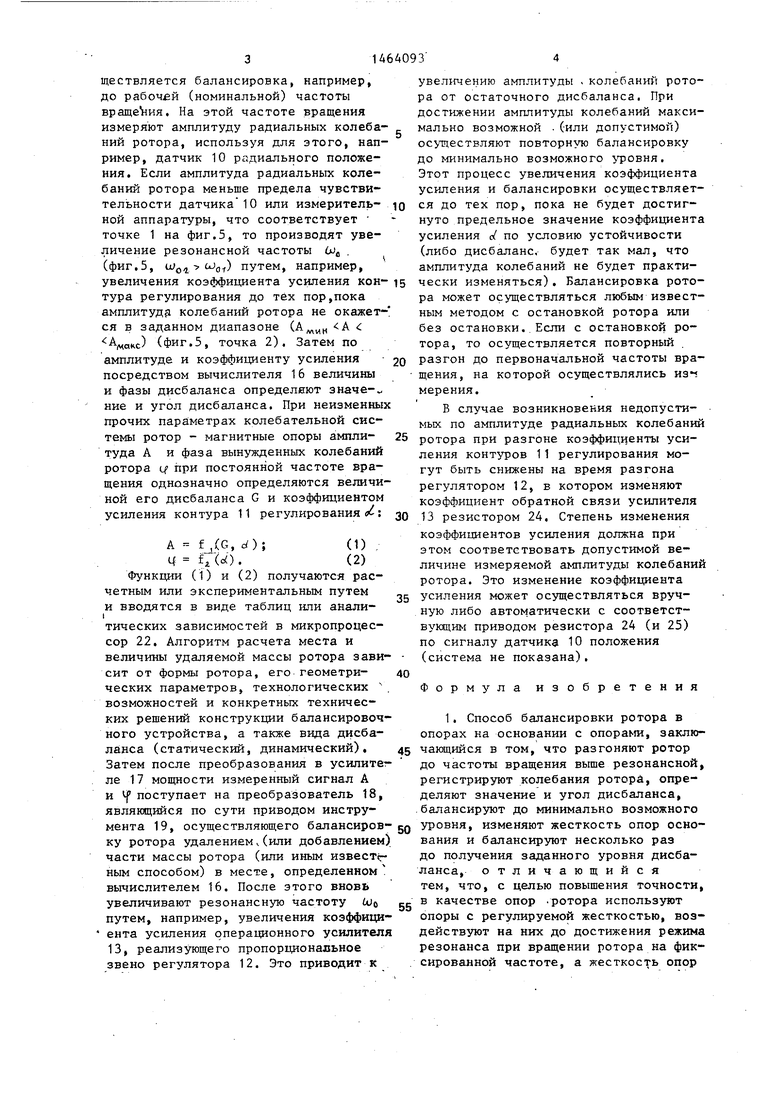
На фиг.1 представлена электромеханическая часть устройства,реализующего предлагаемый способ балансировки; на фиг.2 - схема управления устройства; на фиг.З - пример устройства, реализукщего изменение резонансной частоты системы ротор - опоры; на фиг.4 и 5 - характеристики, поясняющие процесс балансировки ротора,
Электромеханическая часть устройства содержит балансируемый ротор 1, установленный в радиальных регулируемых магнитных опорах 2, например электромагнитных, имеющих не менее четырех обмоток 3 в каждой опоре. Аксиальные магнитные опоры 4 выполнены электромагнитными с обмотками 5. Для стабилизации ротора в аксиальном направлении на статоре установлены датчики 6 аксиального положения. Основание 7 с опорами (не показаны) служит для жесткого крепления корпуса ротора. Для осуществления разгона ротор имеет активную часть, расположенную против статора 8 электродви- гателя 9, На статоре также установлены датчики 10 радиального положения. Схема управления включает контуры 11 регулирования радиальных регулируемых магнитных опор, состоящие из датчиков радиального положения, регуляторов 12 выполненных, например на операционных усилителях 13, и реа.пизующих пропор- ционально-интегро-дифферен1 (ирующий закон управления, а также усилители 14 мощности линейного или ключевого типа, соединенные с обмотками магнитных опор. Схема управления содержит также балансировочшзй блок 15, включающий вычислитель 16. величины и фазы дисбаланса, соединенный входами с одним или несколькими контурами регулирования радиальных магнитных опор, а выходом - с усилителем 17 мощности, который в свою очередь че- рез преобразователь 18 соединен с балансировочным инструментом 19, в качестве которого могут быть использованы, например сверлильные или ла
5
0
5
0
0
5 0 5
i0932
зерны(. головки, осуществляющие непосредственное локальное удаление материала ротора п необходимом коли-- чествй и соответствуюцем месте. Вычислитель величины и фазы дисбаланса состоит из аналого-цифровых преобразователей 20 и 21, один из которых соединен с одним или несколькими регуляторами. Аналого-цифровые преобразователи пвдключены к микропроцессору 22, выход которого соединен с циф- роаналоговым преобразователем 23. Регуляторы содержат операционный усилитель с изменяемым коэффициентом усиления,, В цепь обратной связи операционного усилителя включен переменный резистор 24, Усилитель соединен с аналого-цифровым преобразователем через переменный резистор 25, движок которого жестко соединен с движком переменного резистора 24.
Способ балансировки ротора реализуют следующим образом.
Корпус ротора 1 крепится на основание 7, жесткость опор которого устанавливается максимально возможной. Ротор,, установленный в опорах с ре- гулирз/емой жесткостью, в качестве которых использована магнитная опора 2 с изменяемым коэффициентом усиления контура 11 регулирования, разгоняют до частоты вращения вьщге резонансной. Регистрируют при этом колебания ротора, отфеделяют значение и угол дисбаланса в балансировочном блоке 15 и балансируют до минимально возможного зфовня. Затем изменяют жесткость магнитных опор 2, воздействуя на них контуром 11 регулирования до достижения режима резонанса при вращении ротора на фиксированной частоте, изг-.с меряют параметры дисбаланса,корректи- рукзт его балансировочными инструментами 19 и повторяют эти операции несколько раз до получения заданного уровня дисбаланса.
П р и м е р. После включения статора 8 в сеть осуществляют разгон ротора 1 до частоты вращения и), (фиг.4), соответствующей максимально допустимой (ладанной) амплитуде колебаний ротора, затем разгон прекращается, производят первичную (грубую) балансировку ротора (точка 1 - точка 2). Затем продолжают разгон ротора до частоты вращения, превьппающей резо- нансн то частоту колебательной системы ротор - опоры сл б на которой осуществляется балансировка, например, до рабочей (номинальной) частоты враще 1ия. На этой частоте вращения измеряют амплитуду радиальных колеба- НИИ ротора, используя для этого, например, датчик 10 радиального положения. Если амплитуда радиальных колебаний ротора меньше предела чувствительности датчика 10 или измеритель- ной аппаратуры, что соответствует точке 1 на фиг.5, то производят увеличение резонансной частоты бо . (фиг.5, CxJo) путем, например, увеличения коэффициента усиления кон- тура регулирования до тех пор,пока амплитуду колебаний ротора не окажется в заданном диапазоне (А, А ) (фиг.5, точка 2). Затем по амплитуде и коэффициенту усиления посредством вычислителя 16 величины и фазы дисбаланса определяют значе- - ние и угол дисбаланса. При неизменны прочих пара метрах колебательной системы ротор - магнитные опоры ампли- туда А и фаза вынужденных колебаний ротора tc при постоянной частоте вращения однозначно определяются величиной его дисбаланса G и коэффициентом усиления контура 11 регулирования :
А f,(G, d} , (1) , Ц /(Ю.(2)
Функции (1) и (2) получаются расчетным или экспериментальньш путем и вводятся в виде таблиц или аналитических зависимостей в микропроцессор 22. Алгоритм расчета места и величины удаляемой массы ротора зави- сит от формы ротора, его геометри- ческих параметров, технологических . возможностей и конкретных технических решений конструкции балансировочного устройства, а также вида дисбаланса (статический, динамический), Затем после преобразования в усилителе 17 мощности измеренный сигнал А и f поступает на преобразователь 18, являющийся по сути приводом инструмента 19, осуществляющего балансиров- ку ротора удалением,(или добавлением) части массы ротора (или иньм изввст г ным способом) в месте, определенном вычислителем 16. После этого вновь увеличивают резонансную частоту tOo путем, например, увеличения коэффициента усиления операционного усилителя 13, реализующего пропорциональное звено регулятора 12. Это приводит к
s 0 5 о
5
- 0 5 g 5
увеличению амплитуды - колебаний ротора от остаточного дисбаланса. При достижении амплитуды колебаний максимально возможной .(или допустимой) осуществляют повторную балансировку до минимально возможного тровня. Этот процесс увеличения коэффициента усиления и балансировки осуществляется до тех пор, пока не будет достигнуто предельное значение коэффициента усиления с/ по условию устойчивости (либо дисбаланс, будет так мал, что амплитуда колебаний не будет практически изменяться). Балансировка ротора может осуществляться любым известным методом с остановкой ротора или без остановки. Если с остановкой ротора, то осуществляется повторный . разгон до первоначальной частоты вращения, на которой осуществлялись из мерения.
В случае возникновения недопустимых по амплитуде радиальных колебаний ротора при разгоне коэффициенты усиления контуров 11 регулирования могут быть снижены на время разгона регулятором 12, в котором изменяют коэффициент обратной связи усилителя 13 резистором 24. Степень изменения коэффициентов усиления должна при этом соответствовать допустимой величине измеряемой амплитуды колебаний ротора. Это изменение коэффициента усиления может осуществляться вручную либо автоматически с соответствующим приводом резистора 24 (и 25) по сигналу датчика Ю положения (система не показана).
Формула изобретения
1. Способ балансировки ротора в опорах на основании с опорами, заклю- чагацийся в том, что разгоняют ротор до частоты вращения выше резонансной, регистрируют колебания ротора, определяют значение и угол дисбаланса, .балансируют до минимально возможного уровня, изменяют жесткость опор основания и балансируют несколько раз до получения заданного уровня дисбаланса, отличающийся тем, что, с целью повышения точности, в качестве опор .ротора используют опоры с регулируемой жесткостью, воздействуют на них до достижения режима резонанса при вращении ротора на фиксированной частоте, а жесткость опор
5146Д0936
основания устанавливают максимально кия чувствительности, в качестве ре- возможной. гулируемой опоры ротора используют
2. Способ по п.1, отличаю- магнитную с изменяемым коэффициентом щ и и с я тем, что, с целью повыше- усиления контура регулирования.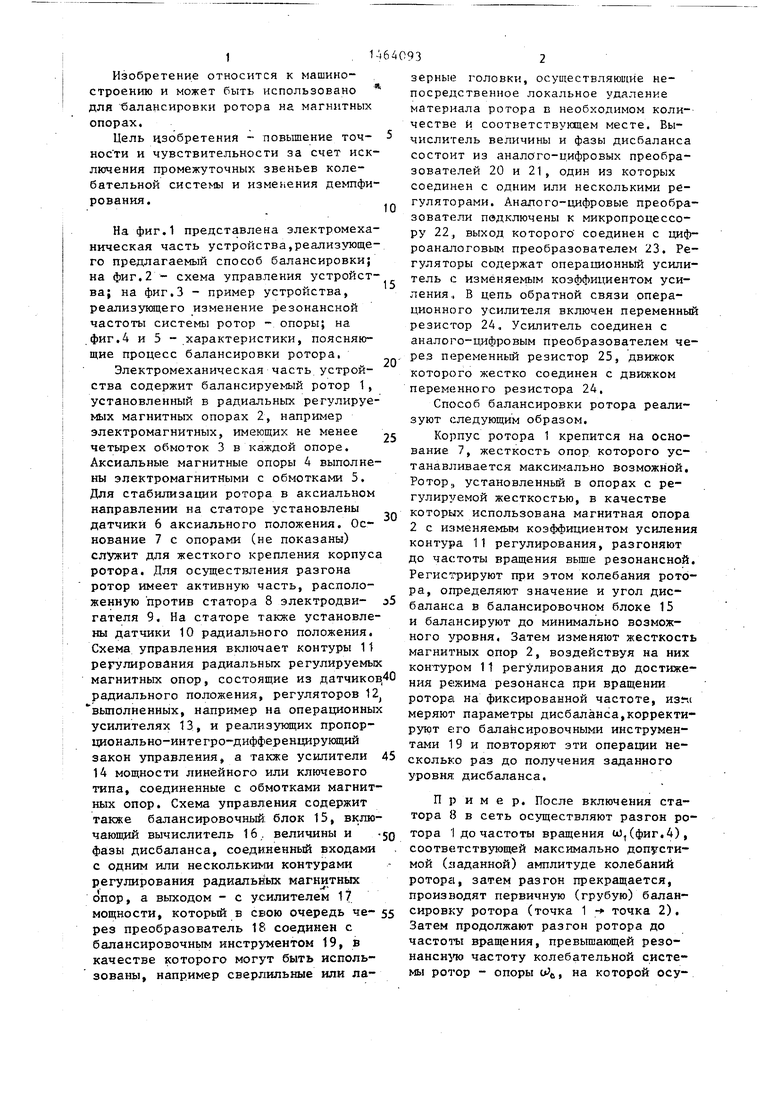
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления радиальными магнитными опорами ротора | 1988 |
|
SU1613724A1 |
| Устройство для управления вращением шпинделя балансировочного станка | 1988 |
|
SU1610339A1 |
| Балансировочный станок | 1977 |
|
SU729456A2 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ЭЛЕМЕНТОВ ДЕТАЛЕЙ МАШИН | 1993 |
|
RU2039957C1 |
| Устройство для управления вращением шпинделя балансировочного станка | 1980 |
|
SU932327A1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| Способ определения динамического дисбаланса ротора авиационного газотурбинного двигателя | 2016 |
|
RU2627750C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИСБАЛАНСА РОТОРОВ | 2016 |
|
RU2643170C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Способ управления магнитными опорами ротора | 1989 |
|
SU1712691A1 |


Изобретение может быть использовано для балансировки ротора на маг- опорах и позволяет повысить точность и чувствительность за счёт исключения промежуточных звеньев колебательной систе№1 и изменения демп4я1рования. Корпус ротора 1 крепится на основании 7, жесткость опор fff Aflff которого устанавливается максимально возможной. Ротор, установленный в своих , Опорах с регулируемой жесткостью, в качестве которых использована магнитная опора 2 с изменяемым коэффициентом контура регулирования, разгоняют до частоты вращения вьше резонансной. Регистрируют при этом колебания ротора, определяют значение и угол дисбаланса в балансировочном блоке и балансируют ротор до минимально возможного уровня. Затем изменяют жесткость магнитных опор 2, воздействуя на них контуром регулирования до достижения режима резонанса при вращении ротора на фиксированной частоте. Измеряют параметры дисбаланса, корректируют его балансировочным инструментом и повторяют эти операции несколько раз до получения заданного уровня дисбаланса. 1 3.п. ф-лы, 5 ил, (Л /4/ АРП Фиг. 1 AffO
Фиг.г
НАЦП21
АмкаГ-
i.- ill
(tfo, «QV
вС(«.)Л4
0 M
-Л/г 1
«.5
Составитель B.CyrophmH Редактор И.Горная Техред М.Дидык Корректор С.Черни .
Фиг.
г2 - настроит 3 SajiuHCUpotKu t-настройнл
04
or
| Способ определения динамических харак-ТЕРиСТиК POTOPOB | 1979 |
|
SU847105A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Колесник Н.В | |||
| Статическая к динамическая балансировка | |||
| - Л.} Машгиз, 1954 с | |||
| Прибор для массовой выработки лекал | 1921 |
|
SU118A1 |
