Изобретение относится к перегрузочной технике, в частности к устройствам, предназначенным для совмещения осей одного изделия с другим при перегрузке изделий, расположенных в каких-либо емкостях, и предпочтительно может быть использовано в ядерном реакторе на быстрых нейтронах с тяжелым жидкометаллическим теплоносителем для извлечения боковых отражателей.
Из уровня техники известно наводящее устройство (патент RU №2487832 C1, В66С 1/66, опубл. 20.07.2013), содержащее основание, большую и малую поворотные плиты со смещенными осями вращения и приводами, обеспечивающими выход на заданную координату, и направляющую трубу для направления перемещения захвата. Направляющая труба выполнена с возможностью прохода через чехлы системы управления и защиты (СУЗ) и стыковки с головкой отработавшей тепловыделяющей сборки, установлена в корпусе, связанном с малой поворотной плитой. Привод перемещения направляющей трубы выполнен в виде винтового механизма.
Однако недостатком этого наводящего устройства является невозможность размещения направляющей трубы наводящего устройства по оси бокового отражателя возле стенки реакторного моноблока, т.к. мешает чехол СУЗ, что обусловлено затесненностью элементов компоновки реакторного моноблока.
Известно наводящее устройство для извлечения боковых отражателей (патент RU №2581100 C1, В66С 1/66, опубл. 10.04.2016), содержащее основание, поворотную плиту с приводом, обеспечивающим выход на заданную координату, направляющую трубу для направления перемещения захвата в виде телескопа и механизм перемещения телескопа. При этом телескоп представляет собой колонну телескопа, образованную, по меньшей мере, двумя телескопически соединенными трубами, с элементом для обеспечения зацепления с захватом. Телескоп установлен на тележке механизма перемещения телескопа, прямолинейно перемещающейся по направляющим качения, расположенным на поворотной плите. Привод механизма перемещения телескопа выполнен в виде винтового механизма.
Однако из-за того, что сцепление захвата с телескопом производится с его консолью, то из-за значительных габаритов колонны телескопа, а также несоосного расположения винтового привода относительно телескопа возможно заклинивание при работе устройства. А наличие механизма линейного перемещения тележки телескопа сильно усложняет конструкцию, особенно, если возникает необходимость герметизировать работу этого устройства.
В основу настоящего технического решения положена задача расширения арсенала технических средств аналогичного назначения, заключающаяся в разработке устройства для совмещения осей одного изделия с другим, позволяющего перегружать изделия, находящиеся на периферии (возле стенок) емкости, с возможностью позиционирования наводящего элемента с требуемой точностью.
Технический результат заключается в расширении технологических возможностей с одновременным повышением точности наведения, надежности и безопасности работы.
Поставленная задача решается тем, что позиционирующее устройство содержит большую и малую поворотные плиты с приводами, обеспечивающими выход на заданную координату в зоне обслуживания. Причем большая поворотная плита концентрично вращается относительно оси емкости, из которой требуется извлечь изделия. На большой поворотной плите установлена крышка, закрывающая малую поворотную плиту, с установленным на ней стыковочным устройством, и имеющая посадочное место для стыковки с перегрузочным контейнером. Малая поворотная плита снабжена сквозным фигурным пазом для прохода захватного устройства с извлекаемым изделием. Ось вращения малой поворотной плиты расположена эксцентрично относительно оси вращения большой. На малой поворотной плите установлено сдвоенное телескопическое устройство для осуществления грузовых операций, приводимое в действие, в частном случае выполнения, цепной передачей. Телескопическое устройство выполнено в виде цилиндрических направляющих со смонтированными в них выдвижными штангами, приводимыми в действие цепной передачей от привода, закрепленного на крышке. При этом на концах выдвижных штанг и между телескопическими направляющими установлена вилка, которая обеспечивает ее сцепление с захватным устройством при повороте малой поворотной плиты. Вилка телескопического устройства снабжена ловителями и приемными цилиндрическими пазами, которые обеспечивают соединение в единое целое захватного и телескопического устройств, имеющих возможность совместного перемещения.
При использовании предлагаемого изобретения могут быть дополнительно получены технические результаты, которые в частности выражаются в упрощении конструкции и повышении технологичности изготовления позиционирующего устройства.
Технические результаты достигаются:
- выполнением механизма перемещения с возможностью движения по окружности на 360°, что позволяет осуществлять выход на координату изделий, размещенных на периферии (возле стенок) емкости, что в свою очередь расширяет технологические возможности в части однозначного позиционирования устройства относительно стенок емкости с одновременным повышением точности наведения телескопического устройства;
- применением малой поворотной плиты, расположенной под крышкой, и размещенного на ней стыковочного устройства, что упрощает конструкцию устройства и повышает технологичность изготовления позиционирующего устройства;
- применением сдвоенного телескопического устройства, что повышает надежность и безопасность работы;
- снабжением телескопического устройства вилкой с ловителями, что предупреждает падение захвата с выгружаемым изделием, а соответственно также повышает безопасность работы.
Заявляемое изобретение поясняется чертежами, представленными на фиг. 1-7.
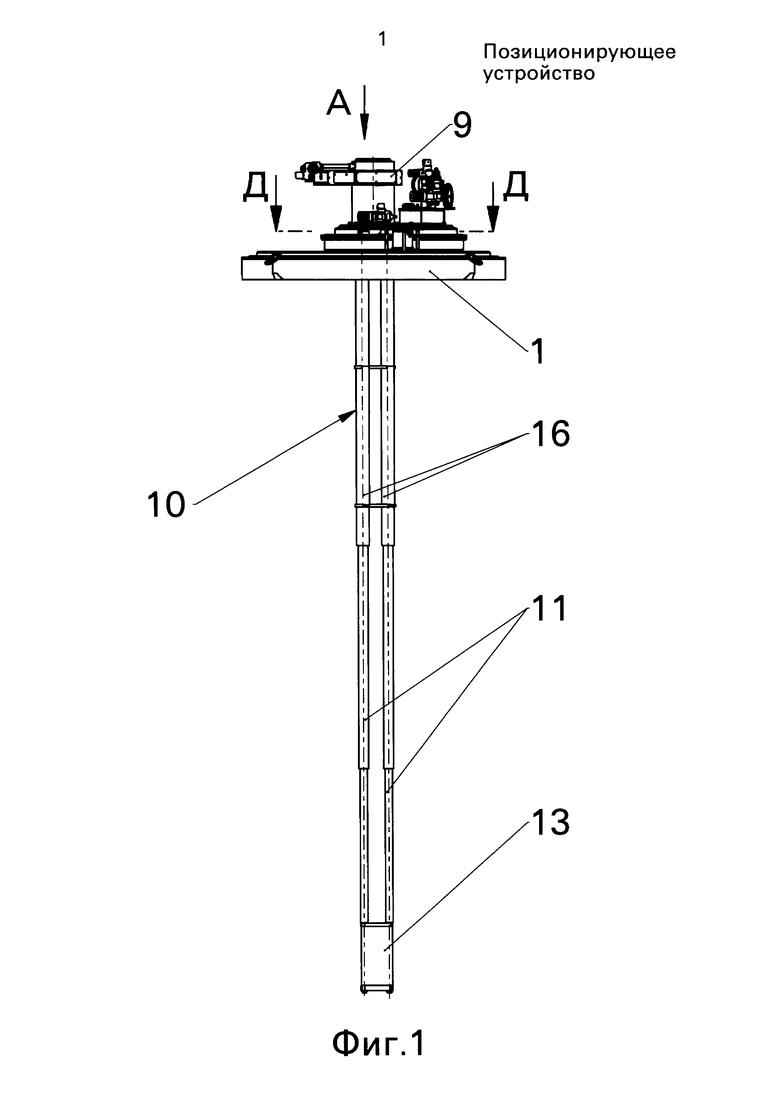
фиг. 1 - общий вид позиционирующего устройства;
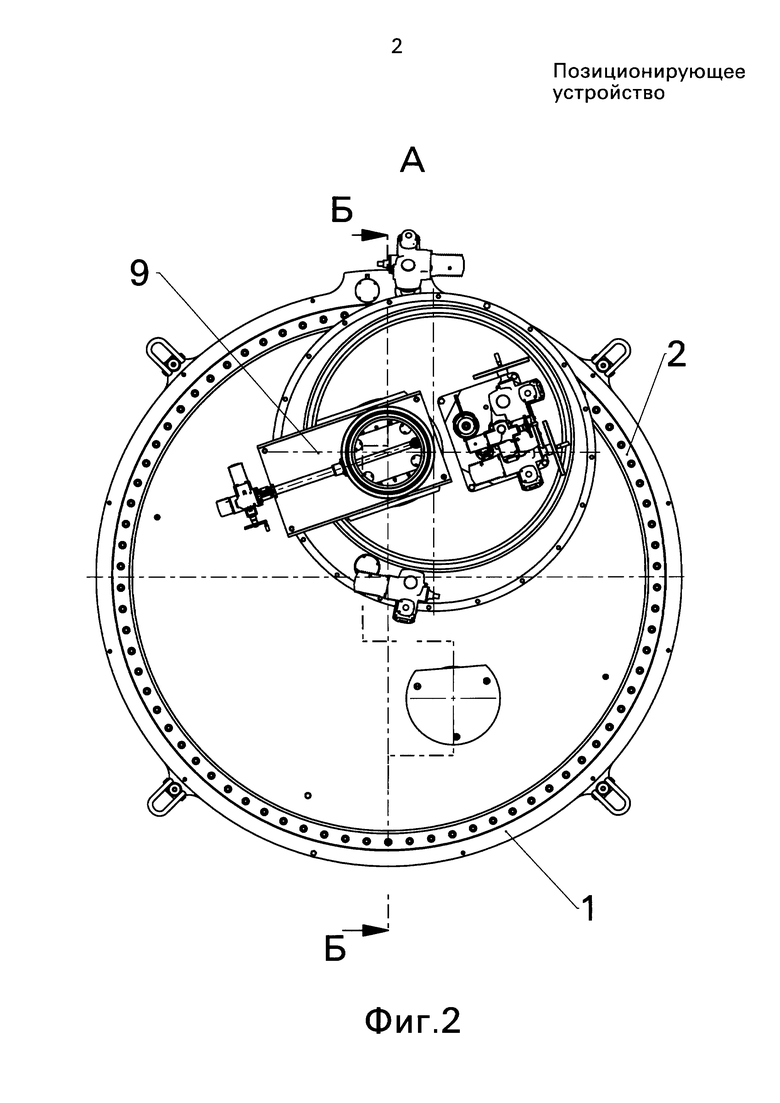
фиг. 2 - вид А на фиг. 1 (вид сверху);
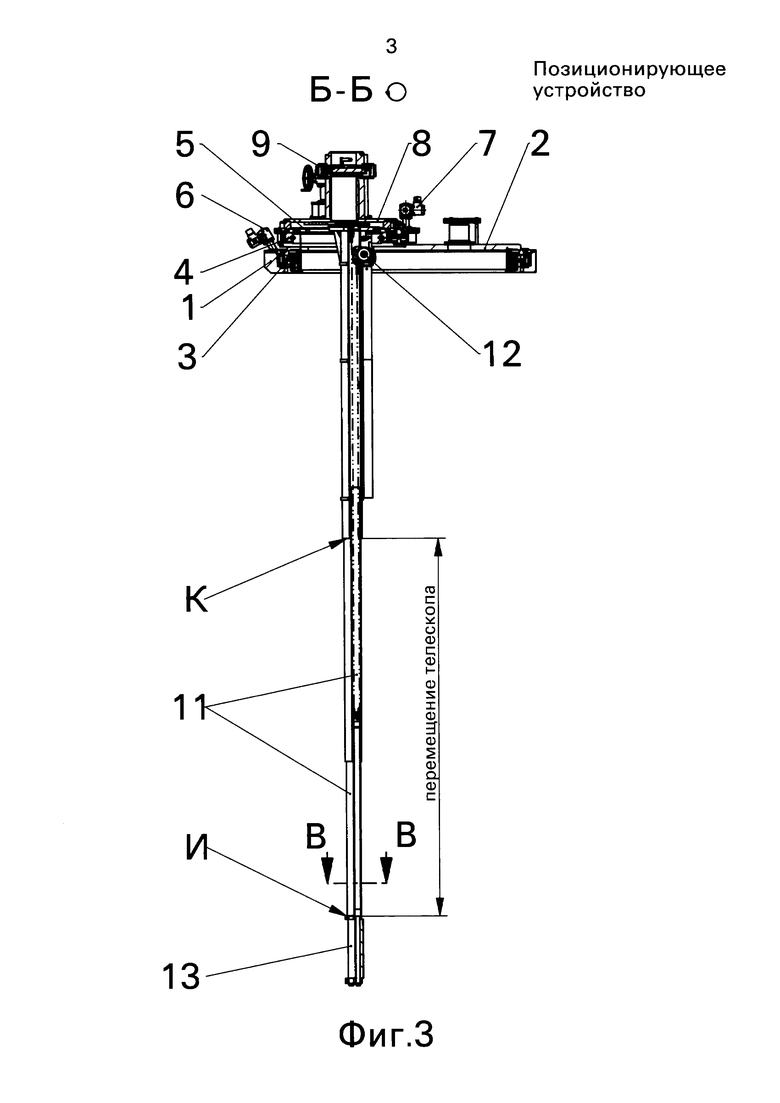
фиг. 3 - сечение Б-Б на фиг. 2;
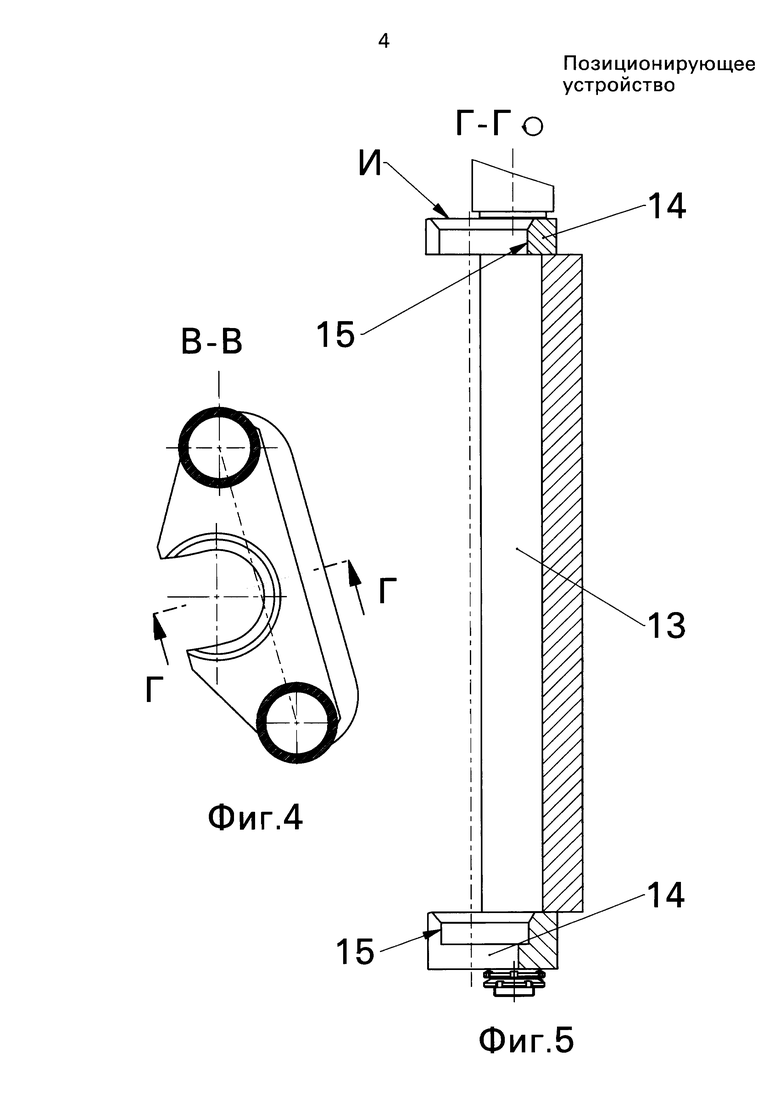
фиг. 4 - сечение В-В на фиг. 3 (вилка);
фиг. 5 - сечение Г-Г на фиг. 4 (вилка);
фиг. 6 - сечение Д-Д на фиг. 1 (показана траектория движения большой и малой поворотных плит).
Позиционирующее устройство (фиг. 1, 2 и 3) содержит основание 1 (фиг. 1, 2 и 3), большую 2 поворотную плиту (фиг. 2 и 3) с опорным поворотным устройством 3 и приводом 4 (фиг. 3), малую 5 поворотную плиту (фиг. 3) с опорным поворотным устройством 6 и приводом 7 (фиг. 3), крышку 8 (фиг. 3) со стыковочным устройством 9 (фиг. 1 и 3), обеспечивающими стыковку и фиксацию с перегрузочным контейнером (условно не показан), телескопическое устройство 10 (фиг. 1) с выдвижными штангами 11 (фиг. 1 и 3), управляемыми в частном случае выполнения цепным приводом 12 (фиг. 3). На нижней части выдвижных штанг 11 телескопического устройства 10 смонтирована вилка 13 (фиг. 3, 4 и 5), которая снабжена ловителями 14 и приемными элементами 15 (фиг. 5).
Большая 2 и малая 5 поворотные плиты с соответствующими опорными поворотными устройствами 3 и 6 имеют свои независимые оси вращения. Траектории движения стыковочного устройства 9 и телескопического устройства 10 показаны на фиг. 6.
Соответствующие большой 2 и малой 5 поворотным плитам приводы 4 и 7 обеспечивают выход на заданную координату в зоне обслуживания.
Большая 2 поворотная плита концентрично вращается относительно оси емкости (условно не показана), из которой требуется извлечь изделия. Малая 5 поворотная плита снабжена сквозным фигурным пазом Е (фиг. 6) для прохода захватного устройства. Ось вращения малой 5 поворотной плиты расположена эксцентрично относительно оси вращения большой 2 поворотной плиты.
На малой 5 поворотной плите установлено телескопическое устройство 10 для осуществления перегрузочных операций, приводимое в действие цепной передачей. Телескопическое устройство 10 выполнено в виде сдвоенных цилиндрических телескопических направляющих 16 (фиг. 1) со смонтированными в них выдвижными штангами 11, приводимыми в действие цепной передачей от цепного привода 12, который закреплен на крышке 8 и расположен внутри телескопических направляющих 16. При этом на концах выдвижных штанг 11 и между телескопическими направляющими 16 установлена вилка 13, обеспечивающая при повороте малой 5 поворотной плиты сцепление с захватным устройством (условно не показано) в зоне Ж (фиг. 6) его предварительного расположения.
Ловители 14 и приемные элементы 15 вилки 13 (фиг. 5) обеспечивают соединение в единое целое захватного и телескопического 10 устройств с возможностью их совместного перемещения. Приемные элементы 15 выполнены цилиндрическими в соответствии с ответным местом на захвате, который выполнен в частном случае выполнения также цилиндрической формы. Возможен и другой вариант выполнения, например шестигранной формы.
На большой 2 поворотной плите установлена крышка 8, закрывающая малую 6 поворотную плиту. На крышке 8 смонтировано стыковочное устройство 9 (фиг. 3), имеющее посадочное место для стыковки с перегрузочным контейнером. Стыковочное устройство 9 (фиг. 3) предназначено для герметизации внутреннего пространства обслуживаемой емкости (при необходимости), а также для позиционирования на нем перегрузочного контейнера.
При этом захватное устройство, которое используется для перегрузки изделий, подвешено на тросе лебедки перегрузочного контейнера (условно не показаны) с возможностью соединения с вилкой 13 телескопического устройства 10 в единое целое при помощи установочных элементов в зоне Ж (фиг. 6).
Позиционирующее устройство работает следующим образом.
Предварительно позиционирующее устройство устанавливают на емкость, из которой необходимо произвести перегрузку изделий. Затем поворачивают большую 2 поворотную плиту в положение, необходимое для перегрузки изделия из емкости, после чего устанавливают перегрузочный контейнер (не показан) на стыковочный узел 9.
В исходном положении телескопическое устройство 10 находится в сложенном состоянии, при этом поверхность И вилки 13 (фиг. 5) упирается в торцевую поверхность К телескопического устройства 10 (фиг. 3).
Сначала малую 5 поворотную плиту поворачивают на угол а (фиг. 6) против часовой стрелки вокруг опорно-поворотного устройства 6 посредством привода 7 таким образом, чтобы ее фигурный паз Е обеспечил возможность прохождения захватного устройства в зону сцепления с вилкой 13 телескопического устройства 10. Затем захватное устройство опускают при помощи лебедки перегрузочного контейнера (не показаны) через открытое отверстие шибера 9 на необходимую глубину. Далее малую 5 поворотную плиту возвращают в зону Ж, где ловители 14 вилки 13 зацепляются за установочные элементы (условно не показаны) захватного устройства и попадают в зону расположения приемных элементов 15 вилки 13. Происходит совмещение их осей и сцепление вилки 13 с захватным устройством. Захватное устройство фиксируется вилкой 13 телескопического устройства 10 посредством приемных элементов 15 при некотором вертикальном перемещении захватного устройства до ослабления троса, которое обеспечивает лебедка перегрузочного контейнера. Далее захватное и телескопическое 10 устройства выставляются совместно на необходимую координату поворотом малой 5 поворотной плиты на угол b (фиг. 6) и большой 2 поворотных плит вокруг опорно-поворотных устройств 3 и 6 при помощи соответствующих приводов 4 и 7. Установленные таким образом захватное устройство и вилку 13 телескопического устройства 10 совместно опускают, например, до головки выгружаемого бокового отражателя, посредством лебедки перегрузочного контейнера, а также при помощи цепного привода 12 путем перемещения выдвижных штанг 11.
Расцепление захватного и телескопического 10 устройств происходит в обратном порядке.
Таким образом, заявленная конструкция позиционирующего устройства позволяет осуществлять перегрузку изделий, находящихся на периферии (возле стенок) емкости, точно и более надежно. Также позволяет технологично осуществлять наведение на заданную координату оси захватного устройства, что в целом обеспечивает повышение надежности и безопасности работы при одновременном расширении технологических возможностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВОДЯЩЕЕ УСТРОЙСТВО | 1999 |
|
RU2161588C2 |
| ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО С ПЕРЕХОДНЫМ БЛОКОМ ДЛЯ УСТАНОВКИ И ИЗВЛЕЧЕНИЯ ИЗ ЯДЕРНОГО РЕАКТОРА ЭЛЕМЕНТОВ АКТИВНОЙ ЗОНЫ | 2014 |
|
RU2569336C1 |
| ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ УСТАНОВКИ И ИЗВЛЕЧЕНИЯ ИЗ РЕАКТОРА ДЛИННОМЕРНОГО ОБОРУДОВАНИЯ | 2014 |
|
RU2569334C1 |
| ТЕЛЕСКОПИЧЕСКАЯ ШТАНГА ПЕРЕГРУЗОЧНОГО МОСТА | 1968 |
|
SU231082A1 |
| Наводящее зажимное устройство | 2021 |
|
RU2759056C1 |
| НАВОДЯЩЕЕ УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ БОКОВЫХ ОТРАЖАТЕЛЕЙ | 2014 |
|
RU2581100C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2014 |
|
RU2582746C1 |
| Лесозаготовительная машина | 1982 |
|
SU1074448A1 |
| МОБИЛЬНАЯ ПЕРЕГРУЗОЧНАЯ УСТАНОВКА | 1993 |
|
RU2097305C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |

Изобретение относится к перегрузочной технике, в частности к устройствам, предназначенным для совмещения осей одного изделия с другим при перегрузке изделий, расположенных в каких-либо емкостях. Устройство содержит большую и малую поворотные плиты, установленные таким образом, что ось вращения малой поворотной плиты смещена относительно оси вращения большой поворотной плиты, а их привода обеспечивают выход на заданную координату в зоне обслуживания. Малая поворотная плита снабжена сквозным фигурным пазом для прохода захватного устройства. Телескопическое устройство выполнено в виде сдвоенных цилиндрических телескопических направляющих с смонтированными в них выдвижными штангами, приводимыми в действие своим, например цепным приводом, закрепленным на телескопических направляющих. На концах выдвижных штанг и между телескопическими направляющими установлена вилка, обеспечивающая при повороте малой поворотной плиты сцепление вилки с захватным устройством. Вилка телескопического устройства снабжена ловителями и приемными цилиндрическими элементами, обеспечивающими соединение в единое целое захватного и телескопического устройств с возможностью их совместного перемещения. Достигается расширение технологических возможностей с одновременным повышением надежности оборудования, технологичности изготовления и безопасности работы. 4 з.п. ф-лы, 6 ил.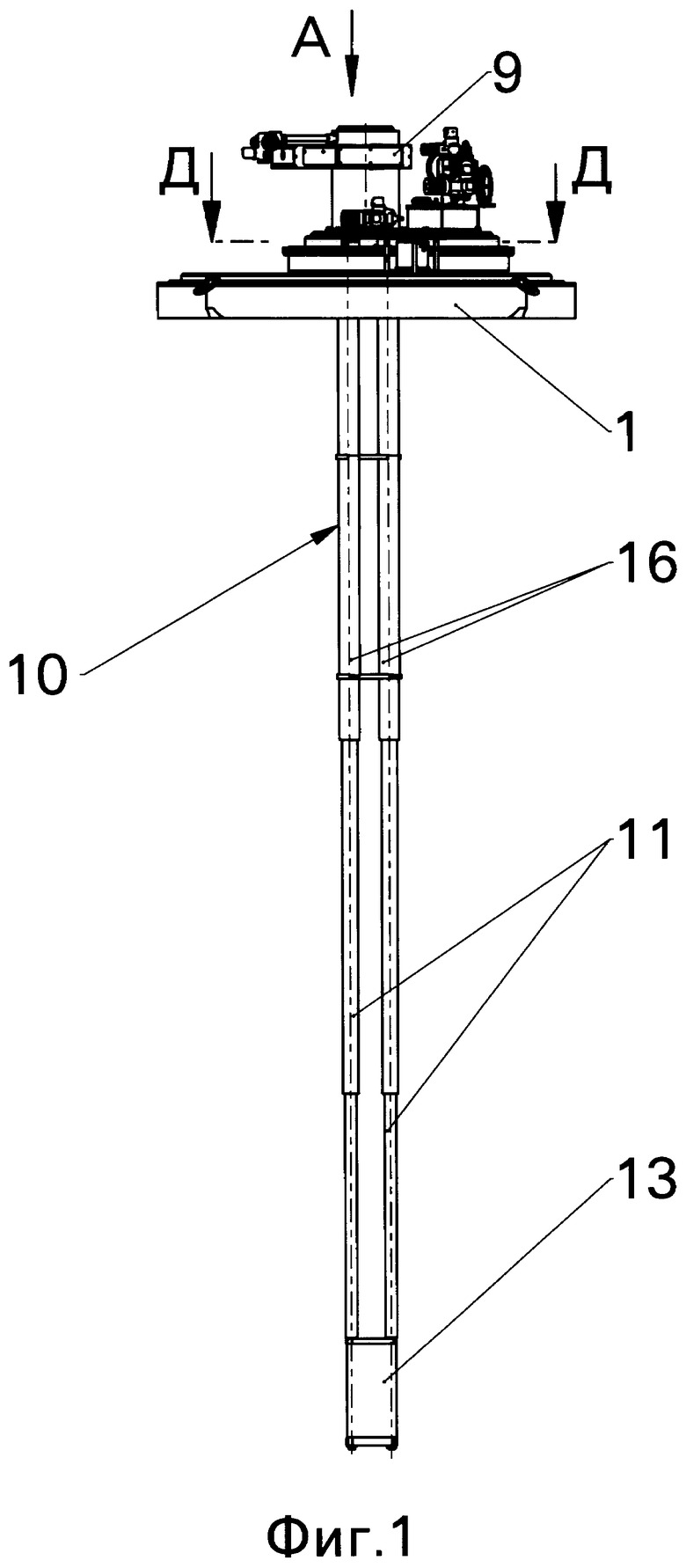
1. Позиционирующее устройство, характеризующееся тем, что содержит основание, большую и малую поворотные плиты с опорно-поворотными устройствами и приводами, крышку с установленным на ней стыковочным устройством, причем крышка установлена на большой поворотной плите с функцией, обеспечивающей гарантированную герметичность устройства, и телескопическое устройство, при этом большая и малая поворотные плиты размещены на основании с возможностью обеспечения выхода на заданную координату в зоне обслуживания, причем ось вращения малой поворотной плиты смещена относительно оси вращения большой поворотной плиты, и, кроме того, малая поворотная плита снабжена сквозным фигурным пазом для прохода захватного устройства, при этом телескопическое устройство выполнено в виде телескопических направляющих со смонтированными в них выдвижными штангами, приводимыми в действие соответствующим управляющим приводом, закрепленным на телескопических направляющих, причем на концах выдвижных штанг и между телескопическими направляющими установлена вилка, обеспечивающая при повороте малой поворотной плиты сцепление с захватным устройством в зоне его предварительного расположения и соединение в единое целое захватного и телескопического устройств с возможностью их дальнейшего совместного перемещения.
2. Устройство по п. 1, характеризующееся тем, что в частном случае выполнения использованы сдвоенные телескопические направляющие.
3. Устройство по п. 1, характеризующееся тем, что телескопические направляющие телескопического устройства, в частности, выполнены цилиндрическими.
4. Устройство по п. 1, характеризующееся тем, что привод управления выдвижными штангами телескопического устройства в частном случае выполнен цепным.
5. Устройство по п. 1, характеризующееся тем, что вилка телескопического устройства снабжена ловителями и приемными элементами, выполненными в частности цилиндрическими.
| НАВОДЯЩЕЕ УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ БОКОВЫХ ОТРАЖАТЕЛЕЙ | 2014 |
|
RU2581100C1 |
| EP 2915637 A1, 09.09.2015 | |||
| ЗАХВАТНОЕ УСТРОЙСТВО | 2014 |
|
RU2582746C1 |
| US 5419427 A1, 30.05.1995. | |||

