Изобретение относится к электроэнергетике и может быть использовано для топографического определения места повреждения кабельных линий электропередачи (КЛ).
В обычных условиях для поиска места повреждения КЛ широко используется метод, в основе которого принцип индукции. Индукционный метод предназначен для топографического (трассового) определения местоположения КЛ. Для КЛ, проложенных в земле, индукционный метод позволяет также уточнить местоположение кабельной трассы, установить глубину залегания кабеля и места смонтированных соединительных муфт [Шалыт Г.М. Определение мест повреждения в электрических сетях.- М.: Энергоатомиздат, 1982]. Это имеет особую важность в текущих условиях специальной военной операции, когда для восстановления работоспособности объектов требуется проводить ремонтные работы в особых условиях (в ночное время и пр.). Исходя из этого целесообразным является применение беспилотного летательного аппарата (БПЛА), выполняющего поиск места неисправности на КЛ в том числе в особых условиях.
Задачей настоящего изобретения является создание способа, позволяющего с использованием БПЛА определить место неисправности на КЛ в различных условиях эксплуатации.
Сущность индукционного метода заключается в фиксации изменений характера магнитного поля над поврежденным кабелем, по жилам которого протекает ток (10–25А) повышенной частоты 1024 Гц.
Фиксация магнитного поля производится при помощи кабелеискателя (трассоискателя), имеющего приемную антенну, усилитель, головные телефоны.
Известен способ определения места повреждения кабельных линий, реализованный в патенте на изобретение [RU 2110075 С1 (Способ определения места повреждения кабельной линии)].
Сущность способа заключается в том, что при подключении повреждённой жилы кабеля к электростатической машине достаточной мощности, протекающий по кабелю ток создаёт магнитное поле, которое улавливается по трассе с помощью индукционного датчика или иного прибора для измерения магнитных величин, и место повреждения определяют по исчезновению магнитного поля как для многофазного, так и для однофазного повреждения.
Недостатками данного способа является: значительное время поиска неисправности (3-5 ч); сложность определения места повреждения кабельной линии; сложность измерения магнитного поля; невозможность или повышенная опасность его выполнения в особых условиях.
Наиболее близким аналогом является способ дистанционного поиска местоположения подземных коммуникаций и определения их поперечного размера, и глубины залегания в грунте, которые описаны в патенте [RU 2664253 C1 Способ дистанционного поиска местоположения подземных коммуникаций и определения поперечного размера и глубины залегания в грунте].
Сущность способа заключается в том, что на одном конце подземного сооружения к его цепи «проводник-земля» подключают генератор низких частот, над поверхностью земли над участком, в пределах которого предположительно проложено подземное сооружение, перемещают приемник с магнитной антенной, измеряют уровень магнитного поля при фиксированных значениях координат расположения приемника с магнитной антенной, по данным измерений строят распределение уровней магнитного поля по поверхности над подземным сооружением, причем к приемнику подключают трехкоординатную магнитную антенну, приемник с трехкоординатной магнитной антенной размещают на БПЛА, положение трехкоординатной магнитной антенны стабилизирует относительно поверхности земли, управляют БПЛА с центральной станции по отдельному каналу связи, управляемый с центральной станции БПЛА перемещают по заданной траектории на заданных высотах над поверхностью земли над участком, в пределах которого предположительно проложено подземное сооружение, с помощью навигационных приборов определяют координаты БПЛА и при известных координатах с помощью приемника с трехкоординатной магнитной антенной измеряют уровни составляющих магнитного поля, данные с результатами измерений по отдельному каналу связи передают на центральную станцию, на которой их обрабатывают и строят распределения уровней компонент магнитного поля по поверхностям над подземным сооружением, получают распределения уровней компонент магнитного поля по поверхностям над подземным сооружениям, при этом распределения получают не менее чем для двух значений высоты над поверхностью земли, затем по данным распределениям определяют местоположение подземной коммуникации, её поперечный размер и глубину залегания в грунте.
Недостатками данного способа являются: необходимость многократного (не менее 2-х раз) определения уровня компонента магнитного поля; недостаточная точность определения места неисправности кабельной линии из-за низкой маневренности и высокой скорости движения БПЛА самолетного типа; невозможность поиска неисправности КЛ на дальних дистанция из-за массогабаритных показателей трехкоординатной антенны; отсутствие наглядной локализации места неисправности, приводящее к большой погрешности при соотнесении расчетных данных с реальным местоположением заглубленной коммуникации.
Технический результат, на достижение которого направлен предлагаемый способ, заключается в возможности автономного использования БПЛА с целью повышения скорости и качества определения координаты местоположения неисправности на КЛ в различных условиях эксплуатации, а также наглядная локализация места неисправности, путем сбрасывания специального устройства (метки).
Заявленный технический результат достигается тем, что в известном способе технического диагностирования кабельных линий (КЛ) электропередачи с применением беспилотного летательного аппарата (БПЛА), при котором на выведенную из строя жилу КЛ подают ток повышенной частоты 1024 Гц, в точке старта при помощи индукционного оборудования, установленного на БПЛА, измеряют и вводят в программу управления движением БПЛА значение индукционного наведенного поля на высоте полета, в процессе движения БПЛА вдоль трассы кабельной линии фиксируют параметры наведенного индукционного поля, до резкого возрастания напряженности магнитного поля, означающего место обрыва, согласно заявляемому изобретению для автоматического управления БПЛА используют загруженное на него программного обеспечение, при этом осуществляют последовательную оценку индукционного наведенного поля на высоте полета по ходу движения, сравнивают его со значением, зафиксированным на стартовом этапе, и направляют БПЛА на координату трассы кабельной линии, где значение индукционного наведенного поля соответствует начальному; после выявления места неисправности, фиксируют координату места неисправности и обозначают на местности устройством-меткой.
Для исключения ошибок первого и второго рода при обнаружении момента резкого возрастания напряженности магнитного поля, продолжают движение БПЛА, при снижении или потере напряженности магнитного поля БПЛА возвращают к точке с резким возрастанием магнитного поля, фиксируют координаты и сбрасывают устройство-метку.
Устройство-метка может быть снабжено устройством, которое постоянно светится за счет наведенного тока в зоне обрыва.
Сущность способа технического диагностирования заглубленных кабельных линий электропередачи с применением БПЛА заключается в том, что на выведенную из строя жилу КЛ подается ток 25А повышенной частоты (1024 Гц) при помощи генератора звуковой частоты (ГЗЧ), далее БПЛА с установленным на нем рамкой-приемником запускают от открытого распределительного устройства, где он при помощи программы управления, например, с использованием программного продукта (Программа для ЭВМ «Автоматизированная программа диагностики кабельных линий электропередачи с применением БПЛА» №2022669620 от 21.10.2022 г.) движется вдоль трассы КЛ до момента резкого возрастания напряженности магнитного поля, после чего БПЛА продвигается на 1 шаг своей программы управления вперед (продолжая направление движения), для исключения ошибок первого и второго рода, при снижении или потере напряженности магнитного поля, он возвращается к точке с резким возрастанием магнитного поля, фиксирует координаты и сбрасывает специальное устройство (метку), которое постоянно подсвечивается за счет наведенного тока в зоне обрыва, чем достигается наглядная локализация места неисправности, далее БПЛА возвращается на исходную точку.
Сравнительный анализ показал, что предлагаемый способ отличается от наиболее близкого по технической сущности способа дистанционного поиска местоположения подземных коммуникаций и определения их поперечного размера и глубины залегания в грунте, в первую очередь тем, что для определения координаты места порыва кабельных сетей используется БПЛА с установленным на нем индукционным оборудованием, во-вторых, управление движением БПЛА вдоль трассы кабельной линии осуществляется с помощью предварительно загруженного программного обеспечения, учитывающему индукционное наведенное поле, в третьих, при обнаружении порыва кабельной линии, БПЛА кроме фиксации координаты, осуществляет сброс устройства (метки), которое подсвечивается за счет наведенного поля на месте повреждения КЛ, что в совокупности приводит к возможности в особых условиях выявить и локализовать место порыва кабельной линии с минимальным участием личного состава.
Сущность предлагаемого способа определения места неисправности на кабельных линиях электропередачи с применением БПЛА поясняется схемами, на которых изображены:
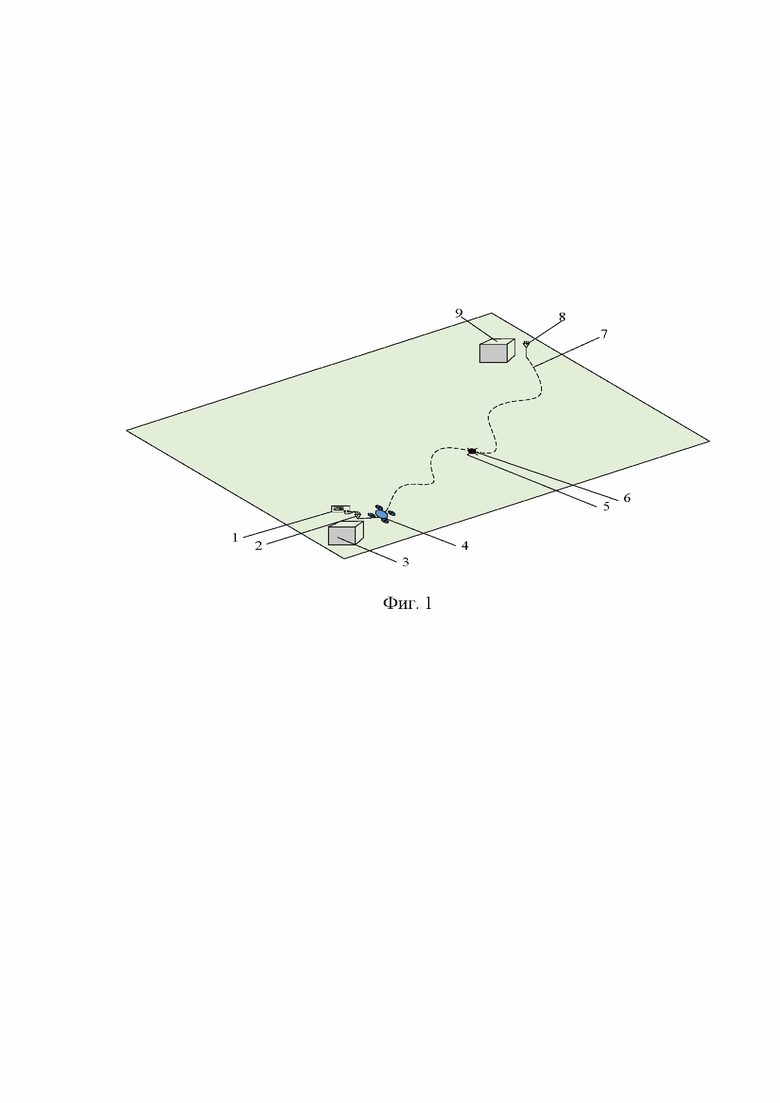
на фиг. 1 – схема исходного положения при реализации способа технического диагностирования заглубленных кабельных линий электропередачи с применением беспилотного летательного аппарата;
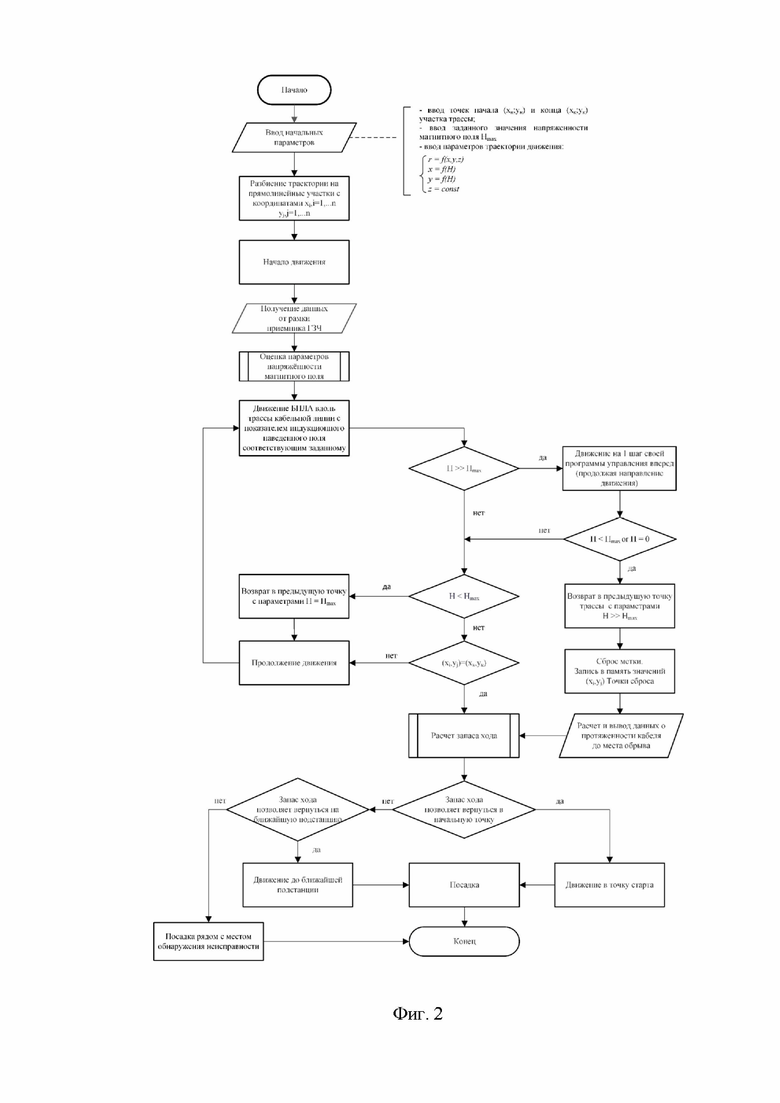
на фиг. 2 – алгоритм поиска неисправности на КЛ;
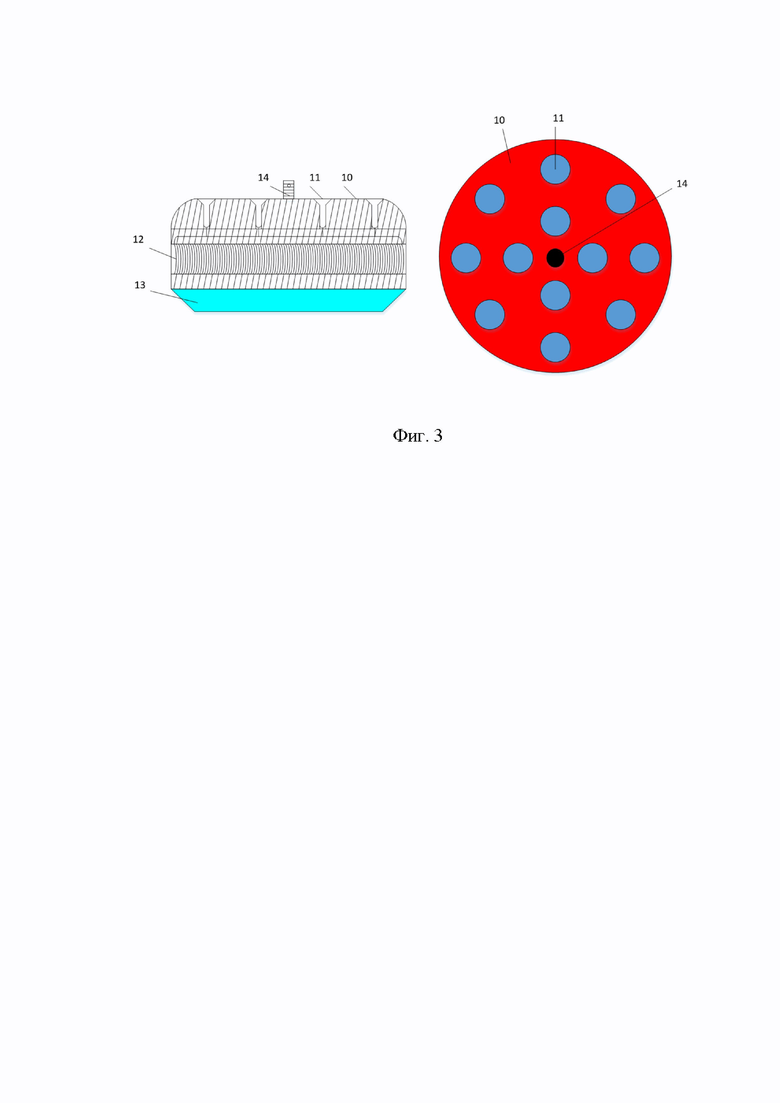
на фиг. 3 – пример специального устройства (метки) для визуализации места обрыва кабельной линии.
Способ реализуется следующим образом (фиг. 1).
1. При помощи ГЗЧ 1 подается ток 25А повышенной частоты (1024 Гц) на концевую заделку кабеля 2 в районе трансформаторной подстанции 3.
2. Беспилотный летательный аппарат 4 с установленным на нем индукционным оборудованием поднимается на установленную оператором высоту (от 1 до 3 метров), фиксирует параметры индукционного наведенного поля на этой высоте и движется вдоль кабельной линии, при этом управление полетом БПЛА осуществляется при помощи любого программного обеспечения, предпочтительно реализованного на базе алгоритма поиска неисправности на КЛ, представленного на фиг. 2, в основе которого лежит последовательная оценка и сравнение индукционного наведенного поля на высоте полета, выбор параметра индукционного наведенного поля равного зафиксированному и наведение БПЛА на координату с соответствующим параметром индукционного наведенного поля.
3. При достижении места короткого замыкания 5, которое будет характеризоваться резким увеличением напряженности магнитного поля, БПЛА выполняет запрограммированное действие, для исключения ошибок первого и второго рода при обнаружении места короткого замыкания. Вернувшись на точку, где наблюдается резкое увеличение напряженности магнитного поля, БПЛА сбрасывает специальное устройство (метку), предпочтительно светодиодный указатель 6 (фиг. 3), который под собственным весом упав на землю в районе короткого замыкания, за счет наведенного в зоне обрыва тока будет подсвечиваться встроенными светодиодами, обеспечивая наглядную локализацию места неисправности на поверхности земли.
Пример светодиодного указателя приведен на фиг. 3. Корпус 10 выполнен из ударопрочного полистирола, в верхней части которого размещены светодиоды 11 (в достаточном количестве), связанные с катушкой индуктивности 12, размещенной в средней части конструкции. Нижняя часть конструкции выполнена в виде ферромагнитного противовеса 13, стабилизирующего светодиодный указатель 6 при падении таким образом, чтобы указатель 6 приземлился на противовес 13, а светодиоды 11 были направлены вверх. Указатель 6 крепится к БПЛА при помощи захватывающего устройства 14. При попадании в зону короткого замыкания наведенное поле создаст электрический сигнал на светодиодах, которые будут автономно светиться. Аналогичный принцип действия светодиодного указателя используется в беспроводном зарядном устройстве, описанном в патенте [RU 216104111 А Беспроводное зарядное устройство].
4. Далее БПЛА возвращается на домашнюю (указанную конечную) точку, где передает оператору координаты обнаруженного места короткого замыкания на кабельной линии. В случае, если заряда его батареи не хватит для безопасного возвращения, БПЛА останется у места неисправности.
Предлагаемый способ позволяет при помощи БПЛА с предустановленным программным обеспечением и специальным индукционным оборудованием решить задачу автономного определения координаты местоположения неисправности на заглубленных КЛ, а также наглядно локализовать координату короткого замыкания на поверхности земли, путем подсветки участка местности специальным устройством (меткой).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО ПОИСКА МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ КОММУНИКАЦИЙ И ОПРЕДЕЛЕНИЯ ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2017 |
|
RU2664253C1 |
| СПОСОБ ПРИМЕНЕНИЯ РОЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ КОММУНИКАЦИЙ, ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2017 |
|
RU2656281C1 |
| СПОСОБ ДИСТАНЦИОННОГО ПОИСКА МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ КОММУНИКАЦИЙ И ОПРЕДЕЛЕНИЯ ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2017 |
|
RU2656287C1 |
| Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса | 2020 |
|
RU2769037C2 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Способ поиска трассы прокладки оптического кабеля | 2020 |
|
RU2755431C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ АНТЕННЫХ ХАРАКТЕРИСТИК НА ИЗМЕРИТЕЛЬНОЙ ПЛОЩАДКЕ | 2023 |
|
RU2804836C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
| Способ дистанционной диагностики магистральных трубопроводов | 2024 |
|
RU2826327C1 |
| Способ автопилотирования беспилотного летательного аппарата над воздушной линией электропередачи | 2024 |
|
RU2838956C1 |
Изобретение относится к способу технического диагностирования кабельных линий (КЛ) электропередачи с применением беспилотного летательного аппарата (БПЛА). Для диагностирования КЛ на выведенную из строя жилу КЛ подают ток повышенной частоты 1024 Гц, в точке старта при помощи индукционного оборудования, установленного на БПЛА, измеряют и вводят в программу управления движением БПЛА значение индукционного наведенного поля на высоте полета. В процессе движения БПЛА вдоль трассы кабельной линии фиксируют параметры наведенного индукционного поля, осуществляют последовательную оценку индукционного наведенного поля на высоте полета по ходу движения, сравнивают его со значением, зафиксированным на стартовом этапе, при этом резкое возрастание напряженности магнитного поля означает место обрыва. После выявления места неисправности фиксируют координату места неисправности и обозначают на местности устройством-меткой. Обеспечивается повышение скорости и качества определения координаты местоположения неисправности на КЛ в различных условиях эксплуатации, а также наглядная локализация места неисправности. 2 з.п. ф-лы, 3 ил.
1. Способ технического диагностирования кабельных линий (КЛ) электропередачи с применением беспилотного летательного аппарата (БПЛА), при котором на выведенную из строя жилу КЛ подают ток повышенной частоты 1024 Гц, в точке старта при помощи индукционного оборудования, установленного на БПЛА, измеряют и вводят в программу управления движением БПЛА значение индукционного наведенного поля на высоте полета, в процессе движения БПЛА вдоль трассы кабельной линии фиксируют параметры наведенного индукционного поля до резкого возрастания напряженности магнитного поля, означающего место обрыва, отличающийся тем, что для автоматического управления БПЛА используют загруженное на него программного обеспечение, при этом осуществляют последовательную оценку индукционного наведенного поля на высоте полета по ходу движения, сравнивают его со значением, зафиксированным на стартовом этапе, и направляют БПЛА на координату трассы кабельной линии, где значение индукционного наведенного поля соответствует начальному; после выявления места неисправности фиксируют координату места неисправности и обозначают на местности устройством-меткой.
2. Способ по п. 1, отличающийся тем, что для исключения ошибок первого и второго рода при обнаружении момента резкого возрастания напряженности магнитного поля продолжают движение БПЛА, при снижении или потере напряженности магнитного поля БПЛА возвращают к точке с резким возрастанием магнитного поля, фиксируют координаты и сбрасывают устройство-метку.
3. Способ по п. 1, отличающийся тем, что устройство-метку снабжают устройством, которое постоянно светится за счет наведенного тока в зоне обрыва.
| СПОСОБ ГАЗОВОГО БОРИРОВАНИЯ МЕТАЛЛИЧЕСКИХ ПОВЕРХНОСТЕЙ | 0 |
|
SU177254A1 |
| СПОСОБ ОБРАБОТКИ Аноднь1х шллмов | 0 |
|
SU203234A1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ В СОСУДАХ | 0 |
|
SU172078A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И ВРЕЗОК В ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2742631C2 |
| US 9845153 B2, 19.12.2017. | |||
