Изобретение относится к радиоизмерительной технике и может быть использовано для обнаружения и оценки координат несанкционированных врезок в магистральные трубопроводы.
Известен георадар для дистанционного поиска подземных магистральных коммуникаций и определения их поперечных размеров и глубины залегания в грунте, содержащийрадиолокатор с видео-импульсным излучаемым сигналом, монтируемый на беспилотном летательном аппарате [RU 2256941, опубл. 16.06.2004].
Однако из-за конечной длительности импульса этот георадар обладает недостаточной разрешающей способностью чтобы обнаружить трубу небольшого диаметра, отводящую нефтепродукт от врезки в магистральный трубопровод. Кроме того, качание антенных решеток приводит к дополнительным помехам движения, снижающих разрешающую способность метода.
Известны система и метод подповерхностной радиолокации объектов [US № 11714189], позволяющие обнаруживать и идентифицировать подземные крупногабаритные объекты с борта летательного аппарата.
Однако чувствительность этой системы не позволяет локализовать объекты малого диаметра типа кабелей, шлангов и т.п.
Наиболее близким техническим решением, принятым за прототип, является система дистанционного обнаружения дефектов и мест несанкционированного откачки в магистральных трубопроводах [RU № 2821691, опубл. 06.02.2024].
Недостатком этого решения является небольшое смещение частоты собственных вибрации трубопровода (порядка 1-2 Гц) за счёт откачки нефти через врезку и малый диаметр отходящей от врезки шланга, что обуславливает недостаточную чувствительность и надёжность обнаружения врезки.
Технический результат изобретения заключается в повышении скорости обследования, надёжности и чувствительности системы обнаружения врезки за счёт подсвечивания лучом радара волной с линейной поляризацией, совпадающей по направлению с трубопроводом, откачивающим нефтепродукт из врезки.
Предложена система обнаружения несанкционированных врезок в магистральные трубопроводы, состоящая из беспилотного летательного аппарата самолётного типа (БПЛА) с размещением на его борту узкополосного радиолокатора и приемо-передающих антенн, при этом передающая антенна выполнена в виде линейной фазированной решетки (ФАР) из ортогонально расположенных вибраторов один из которых излучает радиоволну линейной поляризацией перпендикулярной оси положения трубопровода, а второй параллельно с ним, вибраторы ФАР подключены через коммутатор к передатчику несущий частоты радиолокационной станции (РЛС), так что ФАР периодически изменяет поляризацию излучаемых волны с поперечной на продольную.
На крыльях БПЛА расположена приемная ФАР с поперечной поляризации относительно оси положения основного трубопровода, которая подключена через синхронный детектор, усилитель с фильтром низкой частоты, и второй коммутатор, синхронно переключающий два фильтра, настроенных на частоту вибрации отходящей от врезки трубы (шланга), и два интегратора усредняющих амплитуды принимаемых сигналов поперечной и продольной поляризации, выходы фильтров и интеграторов подключены к микроконтроллеру, программа которого вычисляет отношение амплитуд сигналов поперечной иxи продольной иy поляризации и сравнивает их с их порогами, превышение которых устанавливает появление несанкционированной врезки, как в случае откачки нефтепродукта, так и при неработающей врезке.
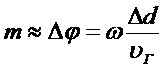
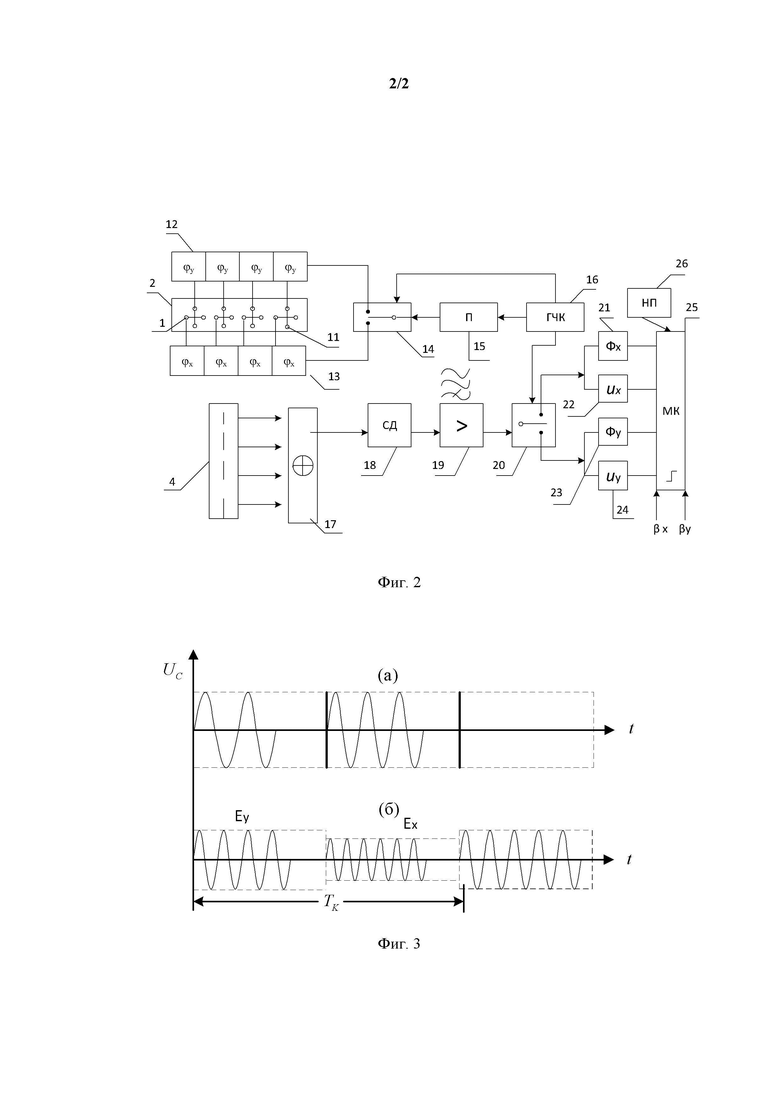
Изобретение поясняется чертежами. На фиг. 1 представлена схема реализации заявленного способа. На фиг. 2 показана блок-схема аппаратного комплекса. На фиг. 3 показаны излучаемые (а) и принимаемые (б) радиосигналы, где под Тк – обозначен период коммутации.
Весь аппаратный комплекс радара расположен на беспилотном летательном аппарате (БПЛА) самолётного типа 1, на котором вдоль фюзеляжа монтируется передающая фазированная решетка (ФАР) 2 содержащая систему ортогональных вибраторов 3, на крыльях БПЛА размещается приёмная ФАР 4 состоящая из поперечных вибраторов относительно оси движения БПЛА вдоль поверхности земли 5. Передающая ФАР облучает поверхность Земли и формирует на ней два сечения электромагнитных лучей 6 и 7, так что поперечное сечение 6 с линейной поляризацией волны Ех, параллельно отходящему от врезки 8 шлангу (трубе) 9. Вдоль трассы основного трубопровода 10 передающая ФАР формирует сечение 7 с линейной поляризации Еу. Блок-схема аппаратного комплекса включает передающую ФАР 2 с ортогональными вибраторами 11, подключённые через фазированные цепи 12, 13 и коммутатор 14 к передатчику 15. Коммутатор 14 управляется генератором частоты коммутации (ГЧК) 16. Приемный тракт содержит приемную ФАР 4 из поперечных вибраторов, создающих при излучении Ех поляризацию радиоволны. Все выходы этих вибраторов объединяются в сумматоре 17 и через синхронный детектор 18, усилитель-фильтр нижних частот 19 и коммутатор 20, поступают на накопитель сигналов подключенный к резонансным фильтрам 21, 22, настроенным на частоты вибрации отходящего от врезки шланга (трубы) и основного трубопровода. Для запоминания амплитуды отраженных сигналов, второй выход коммутатора подсоединен к интеграторам 23, 24. Все выходы фильтров и интеграторов поступают на микроконтроллер 25, сравнивающий наблюдаемые амплитудные их, иу и частоты сигналы Fx, Fy с пороговыми значениями отношений 
 по превышению которых с помощью навигационного приемника 26 в памяти микроконтроллера запоминается время и место обнаружения врезки.
по превышению которых с помощью навигационного приемника 26 в памяти микроконтроллера запоминается время и место обнаружения врезки.
Физической основой работы заявленной системы является облучение отходящего от врезки 8 радиоволной с линейной поляризацией параллельной направлению прокладки шланга 9. С помощью коммутатора 14 производится периодическое переключение вибраторов передающей ФАР с поперечной поляризацией Ех на продольную Еу, что позволяет на выходе приемника получить относительные параметры  , превышение которых над заданными порогом означает обнаружение отходящего от врезки шланга. При этом сигналы Fх, Fу обуславливаются частотами вибраций и основной трубы, выделяемых с помощью фильтров 21, 22. Поскольку у неработающих врезок вибрации выходящего шланга практически отсутствуют, то на выходе приемника с помощью интеграторов 23, 24 накапливаются амплитуды сигналов непосредственно отраженных от цилиндрических корпусов отводящего шланга Их и основной трубы Иу, что отличает работающую и неработающую врезки путем сравнения с порогом
, превышение которых над заданными порогом означает обнаружение отходящего от врезки шланга. При этом сигналы Fх, Fу обуславливаются частотами вибраций и основной трубы, выделяемых с помощью фильтров 21, 22. Поскольку у неработающих врезок вибрации выходящего шланга практически отсутствуют, то на выходе приемника с помощью интеграторов 23, 24 накапливаются амплитуды сигналов непосредственно отраженных от цилиндрических корпусов отводящего шланга Их и основной трубы Иу, что отличает работающую и неработающую врезки путем сравнения с порогом  Время обнаружения врезки и ее координата, определяемые с помощью навигационного приемника «ГЛОНАСС» и «GPS» 26 и записывается в память бортового микроконтроллера 25. Вибраторы передающей ФАР 2 подключаются к коммутатору 14 с помощью фазирующих цепочек 12,13 позволяющих синтезировать диаграмму направленности вдоль соответствующих направлений.
Время обнаружения врезки и ее координата, определяемые с помощью навигационного приемника «ГЛОНАСС» и «GPS» 26 и записывается в память бортового микроконтроллера 25. Вибраторы передающей ФАР 2 подключаются к коммутатору 14 с помощью фазирующих цепочек 12,13 позволяющих синтезировать диаграмму направленности вдоль соответствующих направлений.
Сигналы управления коммутатором формируются генератором частоты коммутации 16 модулирующей излучение передатчика 15. Отраженные от обеих труб радиосигналы принимаются поперечными приемными вибраторами 3, расположенным на крыльях БПЛА, суммируются в блоке 17 и, через синхронный амплитудной детектор 18 и усилитель 19, поступают на коммутатор приемника 20.
Ниже, расчетным путем, с использованием уравнений радиолокации, оценим чувствительность системы к обнаружению отходящего от врезки шланга (трубы). При этом, будем считать, что глубина заложения шланга соответствует величине h1=0,5 м, а основной трубы h2=2 м.
Чувствительность определяется отношением мощности отраженного радиосигнала на входе приемника Рс к мощности теплового шума Рш
 , (1)
, (1)
где  – определяется формулой Больцмена,
– определяется формулой Больцмена,
 ;
;  – температура шумов по Кельвину;
– температура шумов по Кельвину;  – полоса пропускания приемника, определяемая полосой спектра частот вибрации труб fв , как отношения скорости звука в нефти
– полоса пропускания приемника, определяемая полосой спектра частот вибрации труб fв , как отношения скорости звука в нефти 
 к двойному диаметру трубы d.
к двойному диаметру трубы d.
 , (2)
, (2)
где  – коэффициент отношения эффективного спектра вибраций к частоте вибраций.
– коэффициент отношения эффективного спектра вибраций к частоте вибраций.
Требуемая мощность передатчика РЛС оценивается для худшего случая, т.е. обнаружение трубы отводного шланга диаметром 
 , (3)
, (3)
где  – коэффициент направленности действия передающей ФАР;
– коэффициент направленности действия передающей ФАР;
Sa – эффективная площадь ФАР;
λ – длинна рабочей волны РЛС;
 – коэффициент поглощения электромагнитной волны грунтом;
– коэффициент поглощения электромагнитной волны грунтом;
 – радиальная частота излучения РЛС;
– радиальная частота излучения РЛС;
 – магнитная проницаемость грунта;
– магнитная проницаемость грунта;
σг – электропроводность грунта;
h1 – глубина положения шланга;
h2 – высота полета БПЛА:
 где n – число вибраторов ФАР;
где n – число вибраторов ФАР;
 – эффективная поверхность рассеивания трубопровода; d – диаметр, L – длина отражающего отрезка трубы.
– эффективная поверхность рассеивания трубопровода; d – диаметр, L – длина отражающего отрезка трубы.
Для случая неработающей врезки, при следующих численных параметрах:
h1 = 0,5 м; h2 = 10 м; λ = 1 м; n = 5; Sа = 4,3 м2; Q = 54; d = 0,05 м;  ; σТ = 0,8 м2; f =300 мГц; σг = 10-3 см/м; q = 10; = 1500 м/с; γ = 0,1; fв =3000 Гц;
; σТ = 0,8 м2; f =300 мГц; σг = 10-3 см/м; q = 10; = 1500 м/с; γ = 0,1; fв =3000 Гц;  м-1,
м-1,
из (3) получаем 
Для работающей врезки, т.е. при откачке нефти
 , (4)
, (4)
где m – коэффициент модуляции фазы отраженного радиосигнала вибрациями трубы.
При малом индексе фазовой модуляции он соответствует амплитудной
 . Здесь
. Здесь  – амплитуда вибраций;
– амплитуда вибраций;
 – скорость радиоволны в грунте.
– скорость радиоволны в грунте.

коэффициент модуляции составит m=3,7⋅10-5,
в этом случае из (4) РП=0,37 Вт.
Таким образом, требуемая мощность РЛС составляет менее 1 Вт, что вполне вписывается в грузоподъемность небольшого БПЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для дистанционного обнаружения дефектов и мест несанкционированной откачки в магистральных трубопроводах | 2024 |
|
RU2821691C1 |
| Способ создания зоны защиты территорий от низколетящих беспилотных летательных аппаратов | 2023 |
|
RU2821856C1 |
| Способ дистанционной диагностики магистральных трубопроводов | 2024 |
|
RU2826327C1 |
| Система защиты кораблей от подводных дронов | 2024 |
|
RU2832756C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| Бесконтактный дефектоскоп трубопроводов | 2024 |
|
RU2832369C1 |
| Многофункциональный бортовой радиолокационный комплекс | 2017 |
|
RU2670980C9 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
Изобретение относится к радиоизмерительной технике и может быть использовано для обнаружения и оценки координат несанкционированных врезок в магистральные трубопроводы. Предложена система обнаружения несанкционированных врезок в магистральные трубопроводы, состоящая из беспилотного летательного аппарата самолётного типа (БПЛА) с размещением на его борту узкополосного радиолокатора и приемо-передающих антенн. Передающая антенна выполнена в виде линейной фазированной решетки (ФАР) из ортогонально расположенных вибраторов, один из которых излучает радиоволну линейной поляризацией перпендикулярной оси положения трубопровода, а второй параллельно с ним. Вибраторы ФАР подключены через коммутатор к передатчику несущий частоты радиолокационной станции (РЛС), так что ФАР периодически изменяет поляризацию излучаемых волны с поперечной на продольную. Изобретение повышает скорость обследования, надёжность и чувствительность системы обнаружения врезки за счёт подсвечивания лучом радара волной с линейной поляризацией, совпадающей по направлению с трубопроводом, откачивающим нефтепродукт из врезки. 3 ил.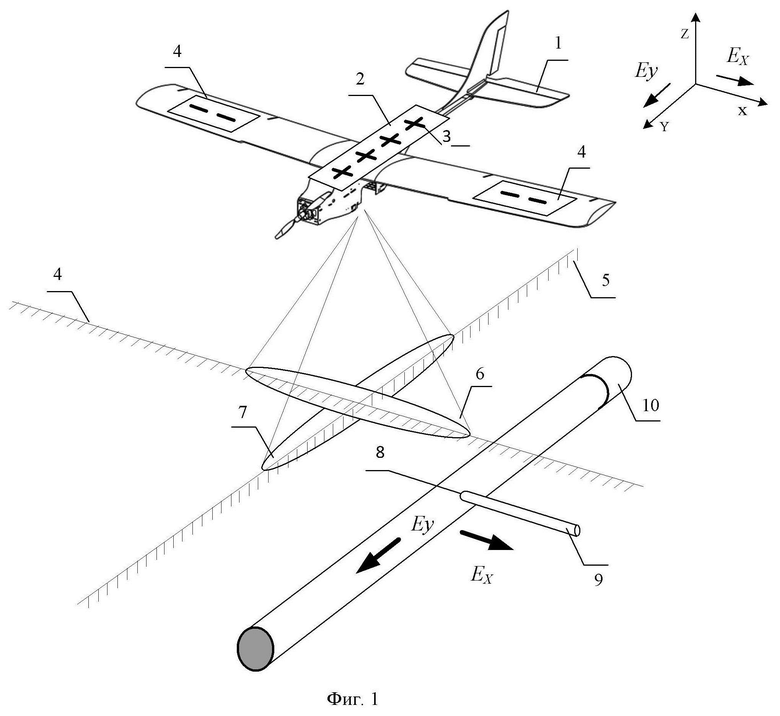
Дистанционная система обнаружения несанкционированных врезок в магистральные трубопроводы, состоящая из беспилотного летательного аппарата самолётного типа с размещением на его борту узкополосного радиолокатора и приемо-передающих антенн, отличающаяся тем, что передающая антенна выполнена в виде линейной фазированной решетки из ортогонально расположенных вибраторов один из которых излучает радиоволну линейной поляризацией перпендикулярной оси положения трубопровода, а второй, параллельно с ним, вибраторы фазированной решетки подключены через коммутатор к передатчику несущий частоты радиолокационной станции, так что фазированная решетка периодически изменяет поляризацию излучаемых волны с поперечной на продольную, на крыльях беспилотного летательного аппарата расположена приемная фазированная решетка с поперечной поляризации относительно оси положения основного трубопровода, которая подключена через амплитудный детектор, усилитель и второй коммутатор, синхронно переключающий два фильтра, настроенных на частоту вибрации отходящей от врезки трубы, и два интегратора, усредняющих амплитуды принимаемых сигналов поперечной и продольной поляризации, выходы фильтров и интеграторов подключены к микроконтроллеру, программа которого вычисляет отношение амплитуд сигналов поперечной Ux и продольной Uy поляризации и сравнивает их с порогами, превышение которых устанавливает появление несанкционированной врезки, как в случае откачки нефтепродукта, так и при неработающей врезке.
| Способ дистанционной диагностики магистральных трубопроводов | 2024 |
|
RU2826327C1 |
| Система для дистанционного обнаружения дефектов и мест несанкционированной откачки в магистральных трубопроводах | 2024 |
|
RU2821691C1 |
| МОБИЛЬНЫЙ ГЕОРАДАР ДЛЯ ДИСТАНЦИОННОГО ПОИСКА МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ МАГИСТРАЛЬНЫХ КОММУНИКАЦИЙ И ОПРЕДЕЛЕНИЯ ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2011 |
|
RU2451954C1 |
| ПЛАВУЧИЙ СТРЕЛОВОЙ КРАН | 0 |
|
SU187275A1 |
| US 2004118313 A1, 24.06.2004 | |||
| US 11714189 B2, 01.08.2023. | |||

