Уже известны акие предохранительные тормозы со свободно падающим грузом, у которых в периоде поднимания можно освободить падающий груз в любой точке его пути. Устройство для поднимания груза в таких известных тормозах состоит в том, что с целью поднятия груза, или для растяжения заменяющей его пружины, сначала нужно развинтить пару винтовых нарезок для того, чтобы захватить задерживающую собачку, после чего новым завинчиванием той же пары нарезок можно поднимать груз или растягивать пружину. Таким образом в подобных устройствах требуется осуществлять два противоположных движения приводного органа.
Задача изобретения состоит в том, чтобы поднятие груза могло осуществляться вращением привода только в одном направлении, и чтобы при этом освобождение падающего груза могло быть достигнуто в любом положении.
Согласно изобретению указанная цель достигается тем, что имеется находящийся в постоянном зацеплении соединительный орган между грузом и приводом, предназначенный для подъема, который может ыть арретирован в любом положении. В качестве соединительного органа служит
вращающийся зубчатый привод. Движение этого привода регулируется ленточным тормозом, в то время как арретирование приводного органа-ручного маховика производится запорной собачкой. Освобождение органа, арретирующего вращающуюся приводную шестерню производится электрическим или механическим путем, а изменяя силу, освобождающую арретир, можно регулировать скорость падающего груза при его падении. Арретирующий тормоз устроен так, что будет действовать арретирующим образом только до тех пор, пока гайка, вращающаяся на ходовом винте, не дойдет в упор до верхнего конца винта. Величина груза и скорость падения могут быть изменяемы в зависимости от высоты хода (шага) винта.
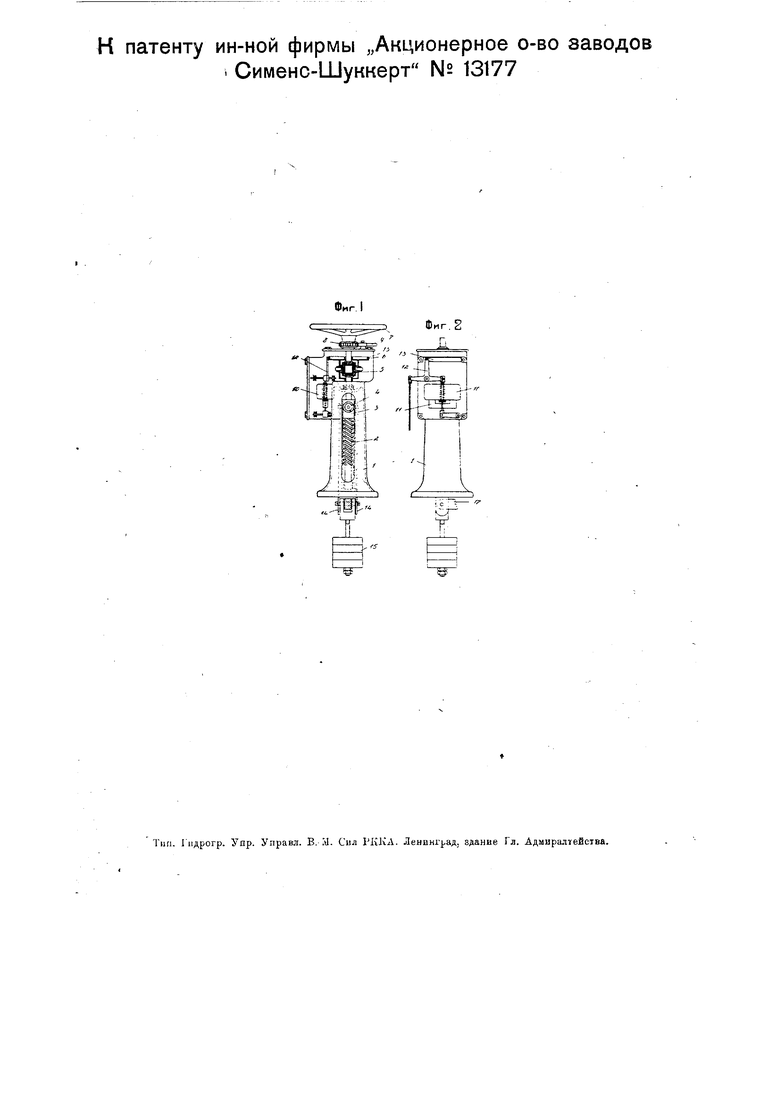
На чертеже фиг. 1 и 2 изображают тормоз в двух проекциях.
Все устройство расположено на колонке 1. Винт 2 снабжен гайкой 5. На гайке имеются направляющие ролики 4, движущиеся в прямолинейной направляющей. На конце шпинделя укреплено одно из колес с дифференциальной зубчатой передачей о. Второе K0.iieco соединено с ручным маховичком 7, который может задерживаться при помощи храпового колеса
8 и собачки 9. На корпусе привода имеется ленточпый тормоз 6. Электромагнит 10 с якорем 11 приводит в действие при помощи системы штанг 12 тормозную. .ленту 13, сидящую.на тормозном диске. J4обозначает сидящие на гайке подвески, несущие груз 15 и сбЧЙененные с тормозным рычагом 17. Освобождение груза может также производиться я от руки, для чего нужно прииоднять собачку 9В рабочем положении груз 15 поднят, так что гайка 5 находится на верхнем конпе винта 2. Собачка 9 задерживает храповое колесо 8. Электромагнит находится поХ напряжением и вследствие этого лента 13 тормоза натянута при помощи тормозных штанг IS. В виду того, что винт 2-не самозатормаживающийся, сила тяжести груза, передаваясь через подвески 14, стремится вращать винт в или гайку 5. Но вращение гайки 5 невозможно, вследстви е движения роликов 4 в прямолинейной направляющей, а вращение зубчатой передачи 5 предотвращено притянутым ленточным тормозом 6 и собачкой .9, которая задерживает храповое колесо 8.
Освобождение надающего груза, а следовательно и тормоза происходит, когда винт получает возможность вращаться. Это освобождение может быть произведено или ослаблением ленточного тормоза, при чем начинает вращаться корнус зубчатого привода, или же освобождением ручного маховичка отводом собачки, при чем при натянутом ленточном тормозе корпус привода остается неподвижным и происходит непосредственная передача силы от ручного маховичка через зубчатую передачу винту. Смотря по тому, освобождаем ли мы ручной маховик или ленточный тормоз, можно регулировать скорость опускания груза по желанию, при чем изменяя силу пружины
в системе тормозных штанг можно заставить тормоз действовать полностью или частично.Вместо ручнбго маховика можно применить и другой механический привод или привод от мотора.
Поднятие вверх тормозного груза производится при помощи маховичка 7 после того, как причина, произведшая спуск, устранена. Если эта причина не внолне устранена в то время, как груз ноднимается или, если происходит новое побуждепие для спуска, та и в том- и в другом случае, независимо от того, задерживает ли машинист маховое колесо или нет, происходит новое освобождение падающего груза.
Нредмет патента.
Предохранительный тормдз со свободно падающим грузом, характеризуюпщйея совокупным применением: а) винтовой пары 2-3, состоящей из вращательно укреп-генного на колонке I винта 1 и гайки 3, снабженной роликами 4, движущимися в прямолинейных направляющих той же колонки 1, и связанной подвесками 14 с тормозным рычагом 17 и грузом 16, опусканием которого производится желательное торможение, и- б) дифференциальной зубчатой передачи -5, заключенной в коробке, несущей на себе диск ленточного тормоза, и нередающей вращательное движение винту 2 от снабженного храповиком 8-9 маховичка 7, вращением которого, нри заторможенной коробке дифференциала, осуществляется подъем, а при расцепленном храповике 8-9 и опускание груза 15, каковой тормоз 6 приводится в действие электромагнитом 10 и удерживает от вращения коробку дифференциала, оттормаживанием которой обусловливается опускание груза 15, своим весом производящего торможение. и патенту ин-ной фирмы „Акционерное о-во заводов Сименс-Шуккерт № 13177
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВОЙ ДОМКРАТ С РУЧНЫМ ПРИВОДОМ | 1970 |
|
SU260143A1 |
| Тележка для канатных дорог | 1973 |
|
SU556071A1 |
| РУЧНАЯ ТАЛЬ | 1992 |
|
RU2026262C1 |
| Ручная лебедка | 1974 |
|
SU497213A2 |
| Винтовой домкрат с ручным приводом | 1977 |
|
SU737354A1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ ПРИЛОЖЕННОГО СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО РУЧНОГО ТОРМОЗА | 2012 |
|
RU2582594C2 |
| ЛЕБЕДКА | 1973 |
|
SU364554A1 |
| БЕЗОПАСНАЯ РУКОЯТКА | 1967 |
|
SU206071A1 |
| Трамбовальная машина | 1926 |
|
SU6815A1 |
| ПНЕВМАТИЧЕСКАЯ ТАЛЬ "СВИДЬ" | 1986 |
|
SU1835772A1 |
Шиг.2
Г|

