Система упреждающего зондирования пространства перед движущимся надводным или подводным судном предназначена для использования в морской практике обеспечения безопасности плавания морских судов в сложных метеорологических условиях и в плохо изведанных районах океанов и морей.
Учитывая большую инерционность судов большого водоизмещения, при своем движении, особенно в зонах со сложным подводным рельефом вероятность встречи с непредсказуемым подводным препятствием весьма велика. Эхолокаторы, которыми оснащены все суда тяжелого класса, хорошо «видят» в ближней зоне, но не позволяют получить достоверную информацию о приближающихся подводных препятствиях: как-то мели, дрейфующие крупногабаритные предметы, включая мины и айсберги, а также суда, идущие пересекающимися курсами, встречи с которыми можно было бы избежать, если располагать упреждающей информацией о препятствии, находящемся в зоне окончательного торможения (расстояние зависит от скорости и массы судна). Известно, что гидролокаторы, которыми располагают все крупные суда, «видят» препятствия и дрейфующие предметы - высокочастотные на расстоянии до 20-30 метров, а низкочастотные до - 3000 метров, но с более низкой разрешающей способностью и не пригодны для обнаружения малогабаритных препятствий и помех.
Цель изобретения обеспечить дополнительную защиту судов тяжелого класса от подводных препятствий. Для достижения этой цели можно использовать глайдеры, движущиеся впереди основного судна. Известны глайдеры - автономные устройства, движущиеся под водой и периодически всплывающие на поверхность, оснащенные сенсорной аппаратурой (эхолокатор, магнитометр). Глайдеры широко используются для исследований биоресурсов, проведения гидрографические измерений и др. Их можно было бы использовать для получения оперативной информации о препятствиях, находящихся в передней зоне движения судна, но виртуальная связь с ними через радио и спутниковые каналы психологически неприемлема для капитана или лоцмана.
Использование глайдера в свободном движении перед судном несет ряд проблем: так возникает неуверенность у капитана или лоцмана, что глайдер строго удерживается в заданной траектории движения судна. Глайдеры не располагают достаточным количеством энергии для обеспечения работы всей аппаратуры, в течение длительного времени для работы в автономном режиме, поскольку расположенная на глайдере аппаратура и движители требует высоких затрат энергии для своего функционирования, что практически невозможно обеспечить.
Только жесткая привязка выносного приборного оборудования, размещаемого как на летающем, так и на плавающем аппаратах, одновременно и синхронно движущихся с судном может обеспечить надежной информацией, необходимой для управления многотонной махиной.
По данным Московского авиационного института (Москва, 18 ноя - РИА Новости) предлагается легкий беспилотник под названием «Птеродактиль», чтобы сканировать поле боя на десятки километров вокруг боевой машины на платформе «Армата». Разведывательный беспилотник будет соединен с машиной гибким кабелем и предназначен для сканирования поля боя на десятки километров вокруг. Он сможет кружить в радиусе 50-100 метров вокруг боевой машины и подниматься на высоту нескольких десятков метров. Благодаря гибкому кабелю, которым он присоединен к боевой машине, он сможет получать электроэнергию и тем самым способен находиться в воздухе неограниченное время. По сравнению с беспилотниками, управляемыми по радиоканалу, «Птеродактиль» сможет брать на борт больше оборудования, поскольку ему не приходится нести на себе аккумуляторы. Еще одним достоинством привязной системы управления, как сообщает газета, является полная защищенность от перехвата информации.
Сущность предлагаемого изобретения заключается в том, что система упреждающего зондирования пространства перед движущимся надводным или подводным судном состоит из двух аппаратов: плавающего и летающего, причем плавающий аппарат состоит из корпуса, на котором размещены водометные движители, совмещенные с рулями управления, а также эхолокатор, магнитометр, глубомер, поворотный прожектор, видеокамера, датчик GPS с выносной антенной, автономный микрокомпьютер, звуковой сигнализатор, проблесковый маяк, габаритные огни, сигнализатор SOS, гаситель продольных и поперечных колебаний. Удержание аппарата на заданной глубине движения обеспечивается автоматически с помощью управляемых водометных движителей. На корпусе летающего аппарата размещены: газовой управляющий движитель, совмещенный с рулями управления, магнитометр, видеокамера, автономный микрокомпьютер с программой-оператор, звуковой сигнализатор, проблесковый маяк, габаритные огни, сигнализатор SOS.
Трос-кабель связывает аппараты с опорными устройствами, на которых расположены: динамометр, датчик величины натяжения троса, угловой датчик вертикального и горизонтального положения трос-кабеля.
Питание обеих аппаратов производится по кабелям, совмещенным с тросами.
Аппараты: воздушный и плавающий, движутся в режиме постоянного натяжения кабель-тросов.
В плавающем аппарате предусмотрен блок приема-передачи гидроакустических сигналов гидроакустической навигационной системы (ГАНС).
Учитывая высказанные выше соображения, предлагается оснащать крупнотоннажные надводные и подводные суда комплексом, состоящим из двух аппаратов: плавающего и летающего, укомплектованных необходимым сенсорным оборудованием.
Плавающий аппарат в исходном положении фиксируется в нижней подводной части судна или на палубе. При этом он постоянно связан с судном трос-кабелем и световолоконным кабелем.
Летающий аппарат в исходном положении находится на опоре, расположенной в верхней носовой части судна, и тоже связан с судном тросом-кабелем и световолоконным кабелем.
При необходимости использования плавающий аппарат спускается в воду в передней части судна и переводится в рабочий режим с подачей энергии по трос-кабелю. Затем включаются движители и плавающий аппарат в режиме «натяга» трос-кабеля и световолоконного кабеля начинает синхронное движение перед судном на расстоянии, нарастающем с увеличением скорости судна и тем самым обеспечивающем получение упреждающей информации о препятствиях, находящихся впереди судна, при любой скорости движения. В нерабочем положении, когда судно находится на стоянке или останавливается, кабель-трос сматывается, подводный аппарат подтягивается к судну и возвращается на опоры.
Плавающий аппарат состоит из следующих основных частей и узлов:
1. Корпус
2. Водометный управляющий движитель
3. Гаситель качки
4. Эхолокатор
5. Магнитометр
6. Глубомер
7. Видеокамера
8. Датчик GPS
9. Поворотный прожектор
10. Автономный микрокомпьютер
11. Звуковой сигнализатор
12. Проблесковый маяк
13. Габаритные огни
14. Сигнализатор SOS
15. Опора подвески
16. Трос-кабель
17. Световолоконный кабель
18. Динамометр
19. Выносная антенна
20. Пульт оператора
21. Угловой датчик опорного узла
22. Программа-оператор
23. Блок приема-передачи гидроакустической информации (ГАНС)
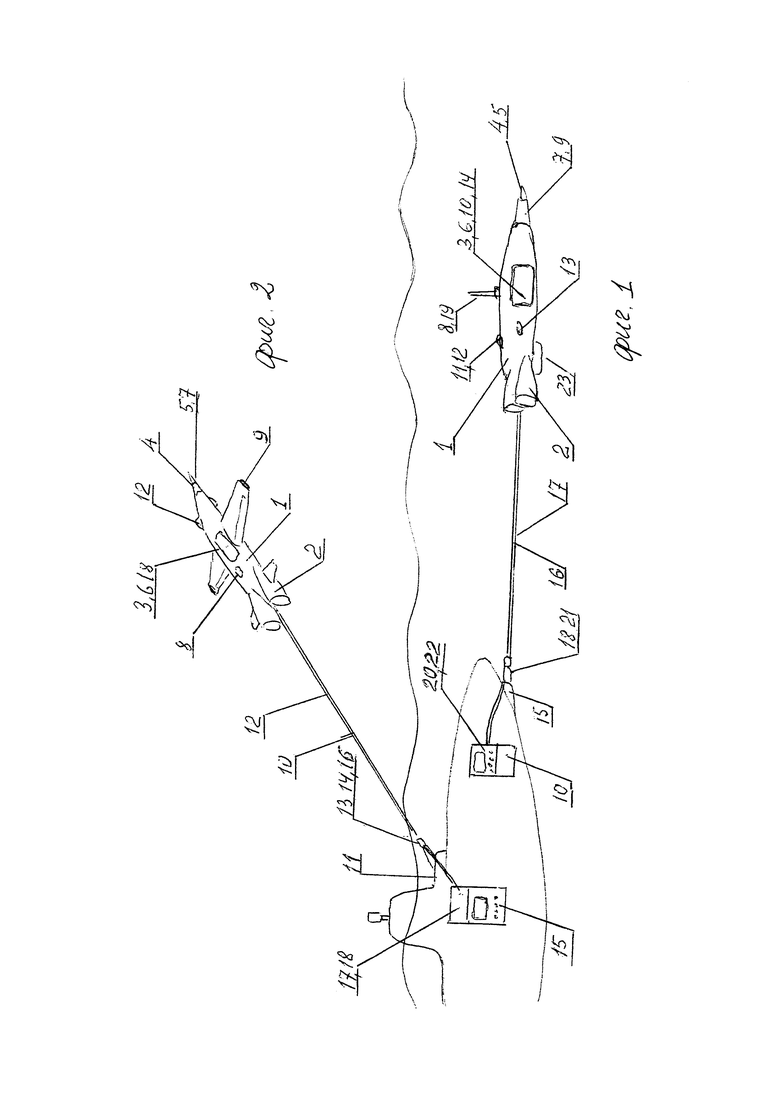
На фиг. 1 изображен плавающий аппарат, состоящий из следующих частей: корпус 1, на котором размещены: водометные управляющие движители 2, гаситель качки 3. На аппарате установлено следующее оборудование: эхолокатор 4, магнитометр 5, глубомер 6, видеокамера 7, датчик GPS 8 с выносной антенной 21, поворотный прожектор 9, автономный микрокомпьютер 10, звуковой сигнализатор 11, проблесковый маяк 12, габаритные огни 13, сигнализатор SOS 14, опора подвески 15, трос-кабель 16, световолоконный кабель 17, динамометр 18, выносная антенна 19, угловой датчик опорного узла 21, программа-оператор 22, блок приема-передачи гидроакустической информации (ГАНС) 23.
Плавающий аппарат в исходном положении устанавливается на опорах подвески 15 в нижней носовой части судна. При этом с помощью трос-кабеля 16 и световолоконного кабеля 17 аппарат связан с опорой подвески 15 и пультом оператора, находящимся в рубке управления судном. Для перевода его в рабочее состояние оператор подает команду на подключение электропитания к аппарату и снятие его с опор подвески 15. Включаются водометные движители 2, и аппарат начинает движение перед судном, натягивая и разматывая трос-кабель 16. При движении аппарат занимает положение перед судном на расстоянии, обеспечивающем упреждающую информацию о препятствиях впереди судна. Включенные приборы: эхолокатор 4, магнетометр 5, глубомер 6, постоянно выдают информацию по световолоконному кабелю 17 на пульт оператора 20, а поворотный прожектор 9 и видеокамера 7 постоянно сканируют пространство впереди аппарата, выдавая дополнительно визуальную информацию на пульт оператора.
Автоматическое удержание плавающего аппарата на заданной глубине движения обеспечивается программой-оператором 22.
Динамометр 18, связанный с трос-кабелем 16, позволяет задавать и контролировать необходимый уровень натяга тросов для устойчивого движения аппаратов перед судном.
Для дополнительного контроля и повышения надежности работы системы предупреждения об опасности предусмотрен блок приема-передачи гидроакустических сигналов гидроакустической навигационной системы (ГАНС) 25, а использование световолоконного кабеля для съема и передачи информации с приборов, расположенных на аппарате, позволяет повысить помехозащищенность информации, поступающей с приборов.
Летающий аппарат состоит из следующих основных частей и узлов:
1. Корпус
2. Газовый управляющий движитель
3. Высотомер
4. Магнитометр
5. Видеокамера
6. Датчик GPS
7. Прожектор
8. Проблесковый маяк
9. Габаритные огни
10. Трос-кабель
11. Опора подвески
12. Световолоконный кабель
13. Динамометр
14. Датчик величины натяжения троса
15. Пульт оператора
16. Угловые датчики горизонтального и вертикального положения троса
17. Программа-оператор
18. Автономный микрокомпьютер
На фиг. 2 изображен летающий аппарат, состоящий из следующих частей: корпус 1, на котором размещены: газовый управляющий движитель 2, высотомер 3, магнитометр 4, видеокамера 5, датчик GPS 6, 7, проблесковый маяк 8, габаритные огни 9, прожектор 7, трос-кабель 10, опора подвески 11, световолоконный кабель 12, динамометр 13, датчик величины натяжения троса 14, угловые датчики горизонтального и вертикального положения троса 16, пульт оператора 15, автономный микрокомпьютер 18 с программой-оператором 17.
Летающий аппарат в исходном положении находится на опоре подвески 11 в верхней носовой части судна. С помощью трос-кабеля 10 и световолоконного кабеля 12 аппарат связан с судном и пультом оператора 15, находящимся в рубке управления, и готов к применению.
Летающий аппарат работает следующим образом: по сигналу оператора к аппарату подключается электропитание и он переводится в рабочее состояние, проводится тестирование всех приборов аппарата, затем проверяется и включается газовый управляющий движитель 2. После этого аппарат снимается с опоры подвески 11, поднимается вверх и начинает движение впереди судна, разматывая трос-кабель 10 и связанный с ним световолоконный кабель 12. Аппарат в процессе движения занимает положение впереди судна на расстоянии, обеспечивающем получение упреждающей информации о препятствиях впереди судна. Аппарат программой-оператором 17 выводится на необходимое упреждение и переводится в автоматический режим. Программа-оператор 17 задает уровень движения аппарата по высоте и расстоянию перед судном с учетом прогнозируемой обстановки. Включенный магнетометр 4 постоянно выдает информацию на пульт оператора о массивных металлических предметах, находящихся в глубине, а видеокамера 5 сканирует пространство впереди аппарата, выдавая дополнительную визуальную информацию на пульт оператора о предметах, находящихся на поверхности воды. При необходимости включается прожектор 7 для подсветки сканируемого пространства.
При движении аппарата с углового датчика опорного узла 16 непрерывно снимается угловое положение троса аппарата относительно продольной оси судна по горизонтали и вертикали и при необходимости вводятся поправки на угловое упреждение и высоту движения аппарата. Информация с высотомера 3, магнетометра 4, видеокамеры 5, датчика GPS 6, непрерывно поступающая на автономный микропроцессор 18 аппарата, одновременно высвечивается также на экранах штурмана и капитана.
В качестве летающих аппаратов для комплектования системы упреждающего зондирования пространства могут использоваться беспилотники как самолетного, так и вертолетного типа.
Использование системы упреждающего зондирования пространства перед движущимся надводным или подводным судном позволит повысить безопасность их плавания на морях и океанах.
Применение световолоконного кабеля для съема и передачи информации с приборов, расположенных на летающем аппарате, позволяет повысить помехозащищенность информации, поступающей с приборов, и скрытность.
Так безопасность воздушного движения ни у кого не вызывает сомнения. Глобальная система контроля воздушного движения планеты, хотя и разбита на государственные сегменты, хорошо увязанные между собой. И, благодаря, тому, что всеобъемлющие мировые спутниковые системы позволили упорядочить интенсивное движение летательных аппаратов настолько, что их случайная встреча между собой в воздухе практически исключена. Тонкий слой атмосферы, в котором совершаются полеты, не удерживает сколь-нибудь долго предметы тяжелее воздуха и поэтому воздух чист от случайных предметов.
Чего не скажешь о морях и океанах, куда сваливается все, что тяжелее воздуха. Океанический «бульон», в котором совершают движения гигантские суда, чреват опасностями случайной встречи с чем угодно. Несмотря на совершенное оборудование этих гигантов, их огромная масса и инерционность при движении не позволяет, даже при их обнаружении, что-либо предпринять.
Идет постоянное совершенствование средств раннего обнаружения опасных препятствий: то, как мели, дрейфующие крупногабаритные предметы («блуждающие» суда), включая мины и айсберги, а также малые суда, идущие с пересекающими курсами. Встречи, которых можно было бы избежать, располагая упреждающей информацией о препятствии, находящемся в зоне окончательного торможения судна, - увы, нет. Так, что достижение того уровня безопасности на море, который уже получен в авиации, еще далеко.
Предлагаемая система упреждающего зондирования пространства перед движущимся надводным или подводным судном не требует серьезных затрат на ее проектирование, поскольку будут использованы хорошо отработанные компоненты, широко применяемые на практике. Создания специализированного производства и применения сложного оборудования не потребуется.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для доставки углеводородов в арктическом бассейне | 2018 |
|
RU2700518C1 |
| САМОХОДНОЕ ПОДВОДНОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО (СПТУ) С ВАКУУМНЫМ ЗАХВАТОМ | 2021 |
|
RU2827915C2 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ РАССРЕДОТОЧЕННЫХ ПО МОРСКОМУ ДНУ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2022 |
|
RU2788227C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
Система упреждающего зондирования пространства перед движущимся надводным или подводным судном содержит плавающий и воздушный аппарат, устройство их подвески соответственно в нижней и верхней части судна. Плавающий аппарат содержит корпус, водометные движители, рули управления, эхолокатор, магнитометр, глубомер, поворотный прожектор, видеокамеру, датчик GPS с выносной антенной, автономный микрокомпьютер, звуковой сигнализатор, проблесковый маяк, габаритные огни, сигнализатор SOS, трос-кабель, оптоволоконный кабель, динамометр, датчик величины натяжения троса, угловой датчик горизонтального и вертикального положения троса, гаситель продольных и поперечных колебаний. Воздушный аппарат содержит корпус с размещенными на нем газовыми управляющими движителями, совмещенными с рулями управления, магнитометр, видеокамеру, датчик GPS, автономный микрокомпьютер, звуковой сигнализатор, проблесковый маяк, габаритные огни, сигнализатор SOS, кабель-трос, оптоволоконный кабель, динамометр, датчик величины натяжения троса, угловые датчики вертикального и горизонтального положения троса. Обеспечивается защита судов от подводных препятствий. 2 з.п. ф-лы, 2 ил.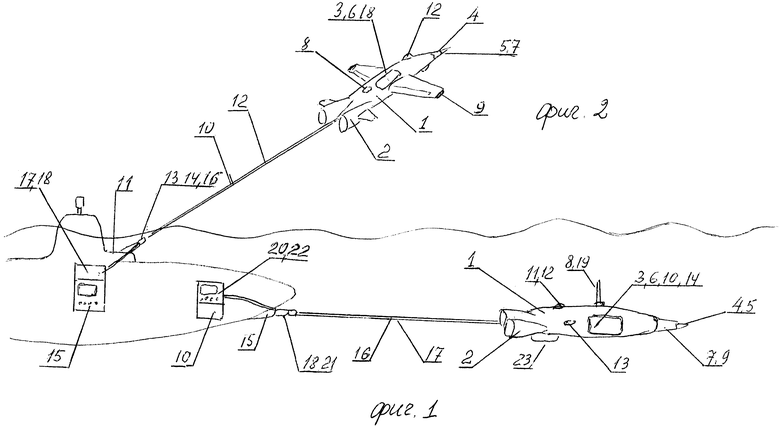
1. Система упреждающего зондирования пространства перед движущимся надводным или подводным судном, состоящая из двух взаимодополняющих аппаратов: плавающего и воздушного, укомплектованных необходимым сенсорным оборудованием, и включающая пульт оператора судна, устройства подвески аппаратов, размещенных в передней верхней и нижней частях судна, отличающаяся тем, что плавающий аппарат состоит из корпуса, на котором размещены водометные движители, совмещенные с рулями управления, эхолокатор, магнитометр, глубиномер, поворотный прожектор, видеокамера, датчик GPS с выносной антенной, автономный микрокомпьютер с программой-оператором, звуковой сигнализатор, проблесковый маяк, габаритные огни, сигнализатор SOS, трос-кабель, оптоволоконный кабель, динамометр, датчик величины натяжения троса, угловой датчик горизонтального и вертикального положения троса, гаситель продольных и поперечных колебаний, а удержание подводного плавающего аппарата на заданной глубине движения обеспечивается автоматически с помощью управляемых водометных движителей, летающий аппарат состоит из корпуса с размещенными на нем газовыми управляющими движителями, совмещенными с рулями управления, содержит магнитометр, видеокамеру, датчик, GPS, автономный микрокомпьютер с программой-оператором, звуковой сигнализатор, проблесковый маяк, габаритные огни, сигнализатор SOS, кабель-трос, оптоволоконный кабель, динамометр, датчик величины натяжения троса, угловые датчики вертикального и горизонтального положения троса, сами аппараты, плавающий и летающий, используются как совместно, так и раздельно и движутся в режиме постоянного натяжения тросов.
2. Система по п. 1, отличающаяся тем, что информационная связь плавающего и летающего аппаратов с пультом оператора судна производится по оптоволоконным кабелям.
3. Система по п. 1, отличающаяся тем, что в плавающем аппарате предусмотрен блок приема-передачи гидроакустических сигналов гидроакустической навигационной системы (ГАНС).
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2303275C2 |
| 0 |
|
SU154874A1 | |
| WO 2001021476 A1, 29.03.2001 | |||
| US 20150274260 A1, 01.10.2015. | |||

