Изобретение относится к области информационно-измерительной техники, в частности к системам стабилизации летательных аппаратов, и предназначено для автоматизированного расчета их параметров. Предлагаемый способ позволяет провести настройку параметров регуляторов для автономных каналов контура стабилизации системы автоматического управления, таких как продольный, боковой и канал крена, а также синтезировать параметры корректирующих фильтров для обеспечения устойчивости системы стабилизации летательного аппарата.
В полете на летательный аппарат (объект управления) могут оказывать влияние различные возмущающие воздействия, например, ветер, упругие колебания корпуса и т.д. Системы, синтезированные по критерию максимальной степени устойчивости, сочетают в себе свойства сравнительно высокого быстродействия и робастности. Это следует из того, что крайние правые корни характеристических полиномов замкнутых систем максимальной степени устойчивости максимально удалены от мнимой оси, поэтому все собственные однородные решения систем управления мажорируются (т.е. ограничиваются) относительно быстро затухающими экспонентами, а максимальная удаленность этих корней от мнимой оси обеспечивает грубость систем этого класса к изменению параметров объектов управления. Таким образом, данный способ позволяет настроить параметры регуляторов так, чтобы система стабилизации оставалась устойчивой при некотором отклонении параметров летательного аппарата от расчетных.
Оценку качества производят по следующим критериям:
1) критерий статической точности:
 ,
,
где g - заданное значение единичного ступенчатого сигнала,
h(∞) - установившееся значение переходной функции h(t);
2) величина перерегулирования:
 ,
,
где hmax - максимальная амплитуда переходной функции;
3) время переходного процесса - время, начиная с которого выполняется неравенство:
 ,
,
где Δ - некоторая заранее заданная величина (в %).
Из уровня техники известен способ формирования сигнала управления системой стабилизации беспилотного летательного аппарата (БПЛА) на основе расчета областей достижимости в плоскости путем выбора оптимального гипотетического момента времени окончания переходного процесса (описание к патенту на изобретение RU №2487052). Данный способ обеспечивает формирование управляющего сигнала, компенсирующего внешние ограниченные возмущения с неизвестными статистическими свойствами.
Недостатком данного способа является отсутствие анализа запасов устойчивости в расчетном моменте времени окончания переходного процесса, и как следствие, система стабилизации может не обладать достаточными запасами устойчивости.
Наиболее близким известным способом, взятым за прототип, является способ многокритериального выбора параметров трехканальной системы стабилизации летательного аппарата с перекрестными связями (описание к патенту на полезную модель RU №142322). Оптимизацию проводят по параметрам (статическая точность, колебательность, быстродействие и устойчивость) в трех каналах, а затем полученные оптимальные параметры используют для задания начальных приближений и диапазона параметров для проведения оптимизации трехканальной системы. Способ позволяет сформировать управляющий сигнал с помощью методов динамической многокритериальной оптимизации на основе компромисса в виде равновесно-арбитражной структуры.
Недостатками данного способа являются недостаточно высокое быстродействие из-за сложности производимых расчетов и большого количества оптимизируемых параметров, отсутствие возможности автоматической перенастройки критериев оценки качества системы стабилизации, а также отсутствие гарантии сохранения устойчивости системы при изменении внешних условий, влияющих на летательный аппарат.
Технической проблемой предлагаемого изобретения является устранение перечисленных выше недостатков и создание способа параметрической оптимизации системы стабилизации летательного аппарата, позволяющего синтезировать систему стабилизации летательного аппарата по критерию максимальной степени устойчивости. Предлагаемый способ позволяет обеспечить робастность полученных результатов (устойчивость найденных решений при изменении внешних условий, влияющих на объект управления), упростить и ускорить оптимизацию параметров системы стабилизации.
Техническая проблема решена за счет того, что разработан способ параметрической оптимизации системы стабилизации летательного аппарата, заключающийся в том, что на первоначальном этапе в качестве исходных данных вводят данные о начальных условиях полета летательного аппарата, для каждого канала управления задают значения сигналов управления и значения критериев качества, затем для каждого канала управления формируют математическую модель с алгоритмом адаптации, после чего проводят оценку работы модели системы стабилизации летательного аппарата в части соответствия заданным критериям качества, при этом формируют единый алгоритм адаптации модели системы стабилизации летательного аппарата, проводят оценку работы модели системы стабилизации летательного аппарата в части соответствия заданным критериям качества, сохраняют результаты оценки работы модели системы стабилизации в случае соответствия заданным критериям качества, в противном случае перенастраивают значения критериев качества и производят повторный цикл операций по формированию математических моделей каналов системы стабилизации, формированию алгоритма адаптации, оценке работы модели многоканальной системы стабилизации летательного аппарата.
В одном из частных случаев в способе параметрической оптимизации системы стабилизации летательного аппарата в качестве данных о начальных условиях полета вводят данные о начальной высоте и начальной скорости летательного аппарата.
В другом из частных случаев в способе параметрической оптимизации системы стабилизации летательного аппарата в качестве каналов управления используют продольный канал, боковой канал и канал крена.
В третьем частном случае в способе параметрической оптимизации системы стабилизации летательного аппарата в качестве сигналов управления в каждом канале управления используют заданные значения перегрузки по одной из осей связанной системы координат летательного аппарата или заданные значения одного из углов, выбранных из группы углов, состоящей из угла тангажа, угла рысканья и угла крена.
В четвертом частном случае в способе параметрической оптимизации системы стабилизации летательного аппарата в каждом канале управления системы стабилизации летательного аппарата в качестве оптимизируемых параметров используют по три коэффициента адаптации.
В пятом частном случае в способе параметрической оптимизации системы стабилизации летательного аппарата в качестве оптимизируемых параметров, представляющих собой коэффициенты адаптации, в продольном канале управления используют коэффициент от рассогласования продольной перегрузки, коэффициент интеграла от рассогласования продольной перегрузки и коэффициент по угловой скорости продольного канала, в боковом канале управления используют коэффициент от рассогласования боковой перегрузки, коэффициент интеграла от рассогласования боковой перегрузки и коэффициент по угловой скорости бокового канала управления, в канале управления по крену используют коэффициент от рассогласования угла крена, коэффициент интеграла от рассогласования угла крена и коэффициент от угловой скорости канала крена.
В шестом частном случае в способе параметрической оптимизации системы стабилизации летательного аппарата в качестве критериев качества используют критерий быстродействия, и/или колебательности, и/или перерегулирования, и/или устойчивости работы системы стабилизации летательного аппарата.
В седьмом частном случае в способе параметрической оптимизации системы стабилизации летательного аппарата при формировании алгоритма адаптации используют по меньшей мере один корректирующий и/или по меньшей мере один сглаживающий фильтр.
Заявляемый способ параметрической оптимизации системы стабилизации летательного аппарата иллюстрируется чертежами, где на фиг. 1 представлен в качестве примера вариант структурной блок-схемы устройства для реализации заявляемого способа параметрической оптимизации системы стабилизации летательного аппарата по критерию максимальной степени устойчивости; на фиг. 2 представлен вид экрана пользовательского интерфейса; фиг. 3 иллюстрирует графики результатов синтеза корректирующих фильтров, в частности, зависимости значений перегрузки продольного канала системы стабилизации от времени. На чертежах приняты следующие обозначения:
1 - модуль задания исходных данных;
2 - модуль формирования математической модели продольного канала;
3 - блок стабилизации продольного канала;
4 - блок формирования угловой скорости продольного канала;
5 - блок формирования перегрузки продольного канала;
6 - модуль формирования математической модели бокового канала;
7 - блок стабилизации бокового канала;
8 - блок формирования угловой скорости бокового канала;
9 - блок формирования перегрузки бокового канала;
10 - модуль формирования математической модели канала крена;
11 - блок стабилизации канала крена;
12 - блок формирования угловой скорости канала крена;
13 - блок формирования угла канала крена
14 - блок формирования алгоритмов адаптации продольного канала;
15 - блок формирования алгоритмов адаптации бокового канала;
16 - блок формирования алгоритмов адаптации канала крена;
17 - блок проверки работы алгоритмов адаптации каналов при их взаимодействии;
18 - блок сохранения положительных результатов проверки;
19 - область ввода данных пользовательского интерфейса;
20 - область управления пользовательского интерфейса;
21 - область отображения пользовательского интерфейса.
Предлагаемый способ заключается в том, что на первоначальном этапе в качестве исходных данных вводят данные о начальных условиях полета летательного аппарата, например, в качестве данных о начальных условиях полета могут быть введены данные о начальной высоте и начальной скорости летательного аппарата. Для каждого канала управления, например, для продольного канала, бокового канала и канала крена задают значения сигналов управления. В качестве сигналов управления в каждом канале управления могут быть использованы заданные значения перегрузки по одной из осей связанной системы координат летательного аппарата или заданные значения одного из углов, выбранных из группы углов, состоящей из угла тангажа, угла рысканья и угла крена. Например, для продольного и бокового канала могут быть использованы заданные значения соответствующей перегрузки, а для канала крена может быть использовано заданное значение угла крена. Также для каждого канала управления задают значения критериев качества, например, критерий быстродействия, и/или колебательности, и/или перерегулирования, и/или устойчивости работы системы стабилизации летательного аппарата. Исходные данные, сигналы управления и критерии качества могут быть заданы, например, с помощью модуля задания исходных данных 1. Исходные данные из модуля задания исходных данных 1 поступают в модули формирования математических моделей продольного канала 2, бокового канала 6 и канала крена 10, а также в блок проверки работы алгоритмов адаптации каналов при их взаимодействии 17.
Затем для каждого канала управления формируют математическую модель с коэффициентами адаптации. Так, например, с помощью модуля формирования математической модели продольного канала 2, включающего в себя блок стабилизации продольного канала 3, блок формирования значений угловой скорости продольного канала 4 и блок формирования перегрузки продольного канала 5 формируют математическую модель и характеристический полином продольного канала системы стабилизации. С помощью блока формирования алгоритмов адаптации продольного канала 14 формируют алгоритмы адаптации продольного канала, формируют, по меньшей мере, один корректирующий фильтр и/или, по меньшей мере, один сглаживающий фильтр продольного канала. С помощью модуля формирования математической модели бокового канала 6, включающего в себя блок стабилизации бокового канала 7, блок формирования угловой скорости бокового канала 8 и блок формирования перегрузки бокового канала 9, формируют математическую модель и характеристический полином бокового канала системы стабилизации. С помощью блока формирования алгоритмов адаптации бокового канала 15 формируют алгоритмы адаптации бокового канала, формируют, по меньшей мере, один корректирующий фильтр и/или, по меньшей мере, один сглаживающий фильтр бокового канала. С помощью модуля формирования математической модели канала крена 10, включающего в себя блок стабилизации канала крена 11, блок формирования угловой скорости канала крена 12 и блок формирования угла крена канала крена 13, формируют математическую модель и характеристический полином канала крена системы стабилизации. С помощью блока формирования алгоритмов адаптации и стабилизации канала крена 16 формируют алгоритмы стабилизации канала крена, формируют, по меньшей мере, один корректирующий фильтр и/или, по меньшей мере, один сглаживающий фильтр канала крена.
В каждом канале управления системы стабилизации летательного аппарата в качестве оптимизируемых параметров могут быть применены три коэффициента адаптации, в продольном канале управления - коэффициент от рассогласования продольной перегрузки, коэффициент интеграла от рассогласования продольной перегрузки и коэффициент по угловой скорости продольного канала, в боковом канале управления - коэффициент от рассогласования боковой перегрузки, коэффициент интеграла от рассогласования боковой перегрузки и коэффициент по угловой скорости бокового канала управления, в канале управления по крену - коэффициент от рассогласования угла крена, коэффициент интеграла от рассогласования угла крена и коэффициент от угловой скорости канала крена.
После формирования математических моделей каналов управления и алгоритмов адаптации для каждого канала управления формируют единый алгоритм адаптации модели системы стабилизации летательного аппарата, затем проводят оценку работы модели системы стабилизации летательного аппарата в части соответствия заданным критериям качества, например, в блоке проверки работы алгоритмов адаптации каналов при их взаимодействии 17. В случае получения положительных результатов проверки, означающих, что алгоритм адаптации удовлетворяет всем заданным критериям, результаты сохраняют в блоке сохранения положительных результатов 18. В случае получения отрицательных результатов проверки, означающих, что алгоритм адаптации не удовлетворяет всем заданным критериям, производят корректировку критериев в модуле задания исходных данных 1 и производят повторный цикл операций по формированию математических моделей каналов системы стабилизации, формированию алгоритма адаптации, оценке работы модели трехканальной системы стабилизации летательного аппарата.
При реализации заявляемого способа используют программу формирования алгоритмов стабилизации (в части оптимизации коэффициентов адаптации и поиска оптимальных корректирующих фильтров), программный код которой записан на машиночитаемом носителе. При выполнении программного кода процессор компьютера выполняет следующие операции, входящие в способ параметрической оптимизации системы стабилизации летательного аппарата: ввод исходных данных о начальной высоте и скорости полета летательного аппарата, формирование математических моделей продольного канала, бокового канала и канала крена, формирование алгоритмов стабилизации продольного канала, бокового канала и канала крена, формирование корректирующих и сглаживающих фильтров продольного канала, бокового канала и канала крена, оценку работы трехканальной системы стабилизации летательного аппарата в части соответствия выбранным критериям качества. Программный код может быть написан на «С», «Matlab» или других языках программирования.
Устройство для реализации заявляемого способа (фиг. 1-2) может включать в себя пользовательский интерфейс, вариант исполнения которого представлен на фиг. 2. Экран пользовательского интерфейса может быть разделен на три области: область ввода данных 19, область управления 20 и область отображения 21. Меню, кнопки и всплывающие диалоговые окна позволяют корректировать исходные данные и сохранять текущие настройки.
Модуль задания исходных данных 1 может быть выполнен в виде области ввода данных пользовательского интерфейса 19. С помощью модуля задания исходных данных 1 могут быть заданы начальные условия: высота и скорость полета летательного аппарата, тип регулятора, подстроечные коэффициенты, параметры фильтров для продольного канала, бокового канала и канала крена для блока проверки работы алгоритмов адаптации каналов при их взаимодействии 17.
Запуск программы (кнопка «Запуск расчета») может быть осуществлен с помощью области управления пользовательского интерфейса 20.
Результаты работы способа могут быть визуализированы с помощью области отображения пользовательского интерфейса 21. На фиг. 3 представлен вариант исполнения области отображения с двумя графиками: первый - зависимость значений перегрузки продольного канала от времени для исходной системы, второй - зависимость значений перегрузки продольного канала от времени для продольного канала системы стабилизации, скорректированной с помощью синтезированного корректирующего фильтра. Для бокового канала могут быть представлены аналогичные графики зависимости значений перегрузки от времени, а для канала крена - графики зависимости значений угла крена от времени.
При определении характеристического полинома замкнутой системы оптимизируемые параметры (настройки) должны быть представлены в коэффициентах характеристического полинома в явном виде, вычисление корней характеристического полинома производят как функции оптимизируемых параметров (настроек).
Начальные условия полета летательного аппарата: высоту Н, м и скорость полета V, м/с передают в модуль задания исходных данных 1, затем в модули формирования математических моделей продольного 2, бокового 6 и канала крена 10 системы стабилизации. Блоки стабилизации продольного 3, бокового 7 и канала крена 11 формируют сигналы на отклонения рулей летательного аппарата δв, δн, δэ. Передаточные функции отношения угловых скоростей к углам отклонения рулей δв, δн, δэ задают в модулях формирования математической модели и хранения результатов моделирования продольного канала 2, бокового канала 6 и канала крена 10, формируют значения угловых скоростей ωz, ωy,ωx, и передают на продольный, боковой канал и канал крена системы стабилизации в качестве обратных связей. Для расчета передаточных функций используют блоки формирования перегрузки продольного канала 5 и бокового канала 9, и блок формирования угла крена канала крена 13, а также отношения перегрузок ny, nz и угла крена γ к угловым скоростям ωz, ωy,ωx. Перегрузки ny, nz и угол крена γ передают в блоки стабилизации продольного канала 3, бокового канала 7 и канала крена 11 в качестве обратных связей. В модулях формирования математической модели и хранения результатов моделирования продольного канала 2, бокового канала 6 и канала крена 10 системы стабилизации летательного аппарата формируют характеристические полиномы, передаваемые в блоки формирования алгоритмов адаптации продольного канала 14, бокового канала 15 и канала крена 16.
Блоки формирования алгоритмов адаптации продольного канала 14, бокового канала 15 и канала крена 16 формируют коэффициенты адаптации и наборы корректирующих и сглаживающих фильтров для каналов: продольного, бокового и крена трехканальной системы стабилизации. Корректирующие и сглаживающие фильтры вводятся для повышения быстродействия и качества управления следящей системой в режиме управления.
Расчет параметров и формирование корректирующего фильтра может быть произведено в виде:
 ,
,
где krat - подстроечный коэффициент, используемый при окончательной настройке системы (при уменьшении подстроечного коэффициента возрастает быстродействие, но увеличивается перерегулирование),  - ближайшие к мнимой оси
- ближайшие к мнимой оси  корней характеристического полинома, используемых при расчете корректирующего фильтра, Iоn - коэффициент максимальной степени устойчивости.
корней характеристического полинома, используемых при расчете корректирующего фильтра, Iоn - коэффициент максимальной степени устойчивости.
Варьирование оптимизируемых параметров (настроек) для максимального удаления крайнего правого корня устойчивого характеристического полинома от мнимой оси производят по критерию
 ,
,
где λi - корни характеристического полинома замкнутой системы степени n, K1, K2, …, Km оптимизируемые параметры (настройки).
Формирование сглаживающего фильтра  может быть произведено в виде:
может быть произведено в виде:
 ,
,
где  - постоянная времени, варьирование которой позволяет уменьшить величину перерегулирования.
- постоянная времени, варьирование которой позволяет уменьшить величину перерегулирования.
В качестве одного из примеров конкретного выполнения последовательно соединенные по крайней мере один корректирующий и один сглаживающий фильтры могут быть подключены к входу блока проверки работы алгоритмов адаптации каналов при их взаимодействии 17.
Корректирующие и сглаживающие фильтры могут представлять собой как блок цифровой части, так и блок аналоговой части. Синтез корректирующих фильтров целесообразно применять для систем стабилизации в широком спектре задач.
Модули формирования математической модели продольного 2, бокового 6 и канала крена 10 и блоки формирования алгоритмов адаптации продольного канала 14, бокового канала 15 и канала крена 16 могут быть реализованы на базе автоматизированного рабочего места (АРМ).
Заявляемый способ параметрической оптимизации системы стабилизации летательного аппарата универсален и может быть применен при разработке систем стабилизации летательных аппаратов с разными аэродинамическими схемами.


Изобретение относится к способу параметрической оптимизации системы стабилизации летательного аппарата. Способ заключается в том, что вводят данные о начальных условиях полета, задают для каждого канала управления значения сигналов управления и значения критериев качества и формируют математическую модель с алгоритмом адаптации, формируют единый алгоритм адаптации модели системы стабилизации летательного аппарата, проводят оценку работы на соответствие заданным критериям качества, сохраняют результаты в случае соответствия, в противном случае проводят повторный цикл операций по формированию математических моделей каналов системы стабилизации, алгоритма адаптации и оценке работы модели. Обеспечивается упрощение и ускорение оптимизации параметров системы стабилизации по критерию максимальной степени устойчивости. 7 з.п. ф-лы, 3 ил. 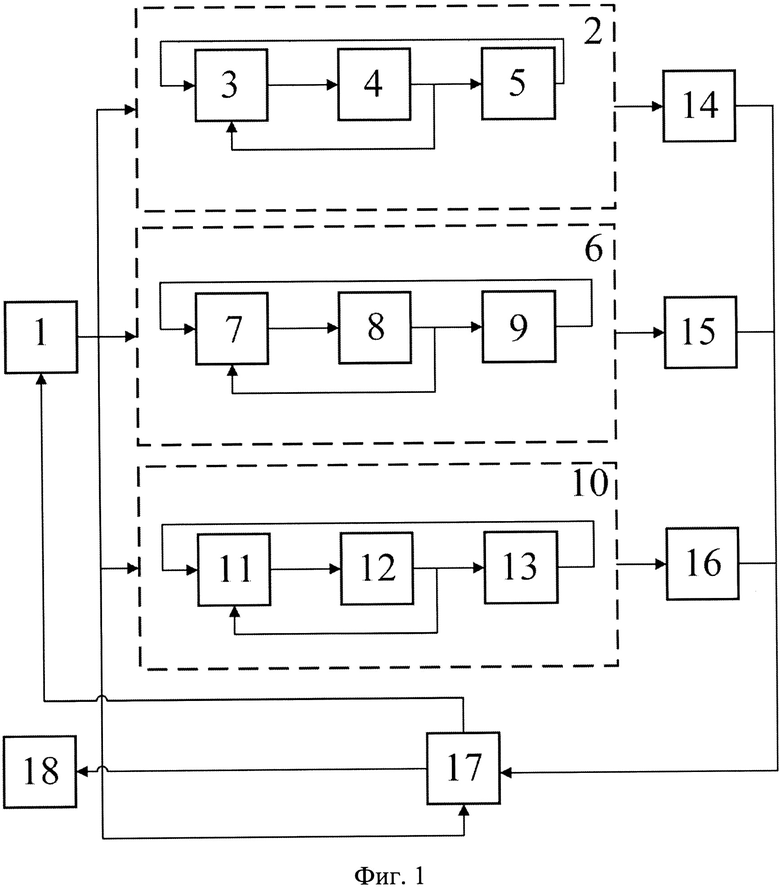
1. Способ параметрической оптимизации системы стабилизации летательного аппарата, заключающийся в том, что на первоначальном этапе в качестве исходных данных вводят данные о начальных условиях полета летательного аппарата, для каждого канала управления задают значения сигналов управления и значения критериев качества, затем для каждого канала управления формируют математическую модель с алгоритмом адаптации, после чего проводят оценку работы модели системы стабилизации летательного аппарата в части соответствия заданным критериям качества, отличающийся тем, что формируют единый алгоритм адаптации модели системы стабилизации летательного аппарата, проводят оценку работы модели системы стабилизации летательного аппарата в части соответствия заданным критериям качества, сохраняют результаты оценки работы модели системы стабилизации в случае соответствия заданным критериям качества, в противном случае перенастраивают значения критериев качества и производят повторный цикл операций по формированию математических моделей каналов системы стабилизации, формированию алгоритма адаптации, оценке работы модели многоканальной системы стабилизации летательного аппарата.
2. Способ по п. 1, отличающийся тем, что в качестве данных о начальных условиях полета вводят данные о начальной высоте и начальной скорости летательного аппарата.
3. Способ по п. 1, отличающийся тем, что в качестве каналов управления используют продольный канал, боковой канал и канал крена.
4. Способ по п. 1, отличающийся тем, что в качестве сигналов управления в каждом канале управления используют заданные значения перегрузки по одной из осей связанной системы координат летательного аппарата или заданные значения одного из углов, выбранных из группы углов, состоящей из угла тангажа, угла рысканья и угла крена.
5. Способ по п. 1, отличающийся тем, что в каждом канале управления системы стабилизации летательного аппарата в качестве оптимизируемых параметров используют по три коэффициента адаптации.
6. Способ по пп. 1 и 5, отличающийся тем, что в качестве оптимизируемых параметров, представляющих собой коэффициенты адаптации, в продольном канале управления используют коэффициент от рассогласования продольной перегрузки, коэффициент интеграла от рассогласования продольной перегрузки и коэффициент по угловой скорости продольного канала, в боковом канале управления используют коэффициент от рассогласования боковой перегрузки, коэффициент интеграла от рассогласования боковой перегрузки и коэффициент по угловой скорости бокового канала управления, в канале управления по крену используют коэффициент от рассогласования угла крена, коэффициент интеграла от рассогласования угла крена и коэффициент от угловой скорости канала крена.
7. Способ по п. 1, отличающийся тем, что в качестве критериев качества используют критерий быстродействия, и/или колебательности, и/или перерегулирования, и/или устойчивости работы системы стабилизации летательного аппарата.
8. Способ по п. 1, отличающийся тем, что при формировании алгоритма адаптации используют по меньшей мере один корректирующий и/или по меньшей мере один сглаживающий фильтр.
| УСТРОЙСТВО ОПТИМИЗАЦИИ АЛГОРИТМОВ АДАПТАЦИИ И СТАБИЛИЗАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОПЕРАТОРНЫМ МЕТОДОМ | 2015 |
|
RU2620280C1 |
| Способ защиты поверхности расходуемого электрода от окисления при электрошлаковом переплаве | 1960 |
|
SU142322A1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| US 8706460 B2, 22.04.2014 | |||
| US 20040181499 A1, 16.09.2004. | |||

