Изобретение относится к машиностроению, преимущественно к космической технике, к фиксирующим устройствам. Изобретение может применяться в составе периферийного стыковочного механизма космического аппарата.
Известен механизм защелок (первый аналог), описанный в патенте US 3820741, содержащий упор треугольной формы, корпус, серьгу, связанную с корпусом посредством первого вращательного шарнира, первую пружину, первый конец которой закреплен на корпусе, а второй - на опоре, являющейся серьгой, запирающее звено, частично выступающее за пределы корпуса, введенное в зацепление с поверхностью упора, и связанное с серьгой посредством второго вращательного шарнира, вторую пружину, первый конец которой закреплен на корпусе, а второй - на запирающем звене, шип, установленный на запирающем звене, на его стороне, противоположной второму вращательному шарниру и выступающей из корпуса части запирающего звена, Г-образный паз, выполненный в корпусе со стороны от запирающего звена, противоположной второму вращательному шарниру, причем большая сторона Г-образного паза имеет радиус закругления равный расстоянию между центром второго вращательного шарнира и центром шипа, и выгнута в сторону, противоположную второму вращательному шарниру, а меньшая сторона примыкает к большей стороне Г-образного паза с края, ближайшего точке пересечения первой оси, проходящей через центры первого и второго вращательных шарниров, и второй оси, проходящей по нормали к поверхности упора, введенной в зацепление с поверхностью запирающего звена, меньшая сторона Г-образного паза приближается к первому вращательному шарниру в радиальном направлении от точки примыкания большей стороны Г-образного паза, Г-образный паз образует с шипом поступательно-вращательный шарнир, при этом шип располагается в части Г-образного паза, ближней ко второму вращательному шарниру, привод, установленный на корпусе, рычаг, закрепленный одним концом на корпусе посредством третьего вращательного шарнира с зазором относительно шипа, являющийся выходным звеном привода.
Недостатком конструкции является увеличение габаритов и массы механизма защелок вследствие того, что привод должен обладать большой мощностью для перевода механизма защелок из закрытого состояния в открытое. Приводу противодействует сила, значение которой определяется внешней нагрузкой, приложенной к опорному ролику со стороны упора.
Известен механизм защелок (второй аналог), представленный в книге B.C. Сыромятникова Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984 на стр. 36, содержащий упор треугольной формы, корпус, серьгу, связанную с корпусом посредством первого вращательного шарнира, первую пружину, первый конец которой закреплен на корпусе, а второй - на опоре, являющейся серьгой, запирающее звено, частично выступающее за пределы корпуса и связанное с серьгой посредством второго вращательного шарнира, вторую пружину, первый конец которой закреплен на корпусе, а второй - на запирающем звене, опорный ролик, установленный на конце выступающей за пределы корпуса части запирающего звена и введенный в зацепление с поверхностью упора, привод, установленный на корпусе, пластину, первым концом закрепленную на корпусе с помощью шарнира, предоставляющего пластине возможность поступательного и вращательного движения, и являющуюся выходным звеном привода, дугообразный паз, выполненный в пластине, шип, установленный на запирающем звене и образующий с дугообразным пазом поступательно-вращательный шарнир, спусковой крючок, установленный на корпусе с зазором относительно шипа со стороны точки пересечения первой оси, проходящей через центры первого и второго вращательных шарниров, и второй оси, проходящей через центр опорного ролика по нормали к поверхности упора, введенной в зацепление с опорным роликом.
Недостатком конструкции является увеличение габаритов и массы механизма защелок вследствие того, что привод должен обладать большой мощностью для перевода механизма защелок из закрытого состояния в открытое. Приводу противодействует сила, значение которой определяется внешней нагрузкой, приложенной к опорному ролику со стороны упора.
Известен механизм защелок, выбранный в качестве прототипа и представленный в книге B.C. Сыромятникова Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984 на стр. 90, содержащий упор треугольной формы, корпус, серьгу, связанную с корпусом посредством первого вращательного шарнира, первую пружину, первый конец которой закреплен на корпусе, а второй на опоре, являющейся серьгой, запирающее звено, частично выступающее за пределы корпуса и связанное с серьгой посредством второго вращательного шарнира, вторую пружину, первый конец которой закреплен на корпусе, а второй - на запирающем звене, опорный ролик, установленный на конце выступающей за пределы корпуса части запирающего звена и введенного в зацепление с поверхностью упора, ограничительный ролик, установленный на корпусе с зазором относительно запирающего звена со стороны, противоположной серьге, привод, установленный на корпусе, рычаг, закрепленный первым концом на корпусе посредством третьего вращательного шарнира и являющийся выходным звеном привода, поступательно-вращательный шарнир с одной вращательной и двумя поступательными степенями свободы, образованный Г-образным пазом и шипом, причем Г-образный паз выполнен в запирающем звене со стороны противоположной второму вращательному шарниру и опорному ролику, большая сторона Г-образного паза размещена на равном удалении от второго вращательного шарнира, меньшая сторона Г-образного паза примыкает к ней с края, противоположного точке Р пересечения первой оси а, проходящей через центры первого и второго вращательных шарниров, и второй оси b, проходящей через центр опорного ролика по нормали к поверхности упора, введенной в зацепление с опорным роликом, меньшая сторона Г-образного паза отдаляется от второго вращательного шарнира в радиальном направлении, а шип расположен на втором конце рычага, противоположном первому, и размещен на меньшей стороне Г-образного паза на максимальном удалении от второго вращательного шарнира.
Недостатками конструкции являются увеличение габаритов и массы механизма защелок, ограничение зоны допустимого расположения шарниров штанг периферийного стыковочного механизма, находящихся в непосредственной близости от механизма защелок, вследствие того, что паз располагается на запирающем звене и увеличивает его габариты.
Техническим результатом изобретения является уменьшение габаритов механизма защелок.
Технический результат достигается тем, что в механизм защелок, содержащий упор треугольной формы, корпус, серьгу, связанную с корпусом посредством первого вращательного шарнира, первую пружину, первый конец которой закреплен на корпусе, а второй на опоре, запирающее звено, частично выступающее за пределы корпуса и связанное с серьгой посредством второго вращательного шарнира, вторую пружину, первый конец которой закреплен на корпусе, а второй на запирающем звене, опорный ролик, установленный на конце выступающей за пределы корпуса части запирающего звена и введенный в зацепление с поверхностью упора, ограничительный ролик, установленный на корпусе с зазором относительно запирающего звена со стороны, противоположной серьге, привод, установленный на корпусе, рычаг, закрепленный одним концом на корпусе посредством третьего вращательного шарнира и являющийся выходным звеном привода, поступательно-вращательный шарнир с одной вращательной и двумя поступательными степенями свободы, в отличие от известного введены шип, расположенный на запирающем звене со стороны, противоположной второму вращательному шарниру и опорному ролику, Г-образный паз, выполненный в корпусе со стороны от запирающего звена, противоположной второму вращательному шарниру и опорному ролику, причем стенка большей стороны Г-образного паза, расположенная ближе ко второму вращательному шарниру, выполнена в форме дуги выгнутой в сторону, противоположную второму вращательному шарниру, меньшая сторона Г-образного паза примыкает к большей стороне Г-образного паза с края, ближайшего точке Р пересечения первой оси а, проходящей через центры первого и второго вращательных шарниров, и второй оси b, проходящей через центр опорного ролика по нормали к поверхности упора, введенной в зацепление с опорным роликом, меньшая сторона Г-образного паза выполнена в направлении к первому вращательному шарниру от точки примыкания большей стороны Г-образного паза, причем рычаг перекрывает меньшую сторону Г-образного паза со стороны, ближайшей точке Р, шип размещен на меньшей стороне Г-образного паза на минимальном удалении от первого вращательного шарнира, а поступательно-вращательный шарнир образован Г-образным пазом, шипом и рычагом.
Технический результат может достигаться также тем, что опорой, на которой закреплен второй конец первой пружины, является серьга.
Технический результат может достигаться также тем, что опорой, на которой закреплен второй конец первой пружины, является запирающее звено.
Заявляемое техническое решение предлагается использовать в составе периферийного стыковочного механизма, чтобы увеличить зону допустимого расположения шарниров штанг периферийного стыковочного механизма, находящихся в непосредственной близости от механизма защелок. Увеличение указанной зоны достигается за счет переноса паза с запирающего звена на корпус и изменения расположения рычага, являющегося выходным звеном привода.
Заявляемое техническое решение поясняется следующими изображениями:
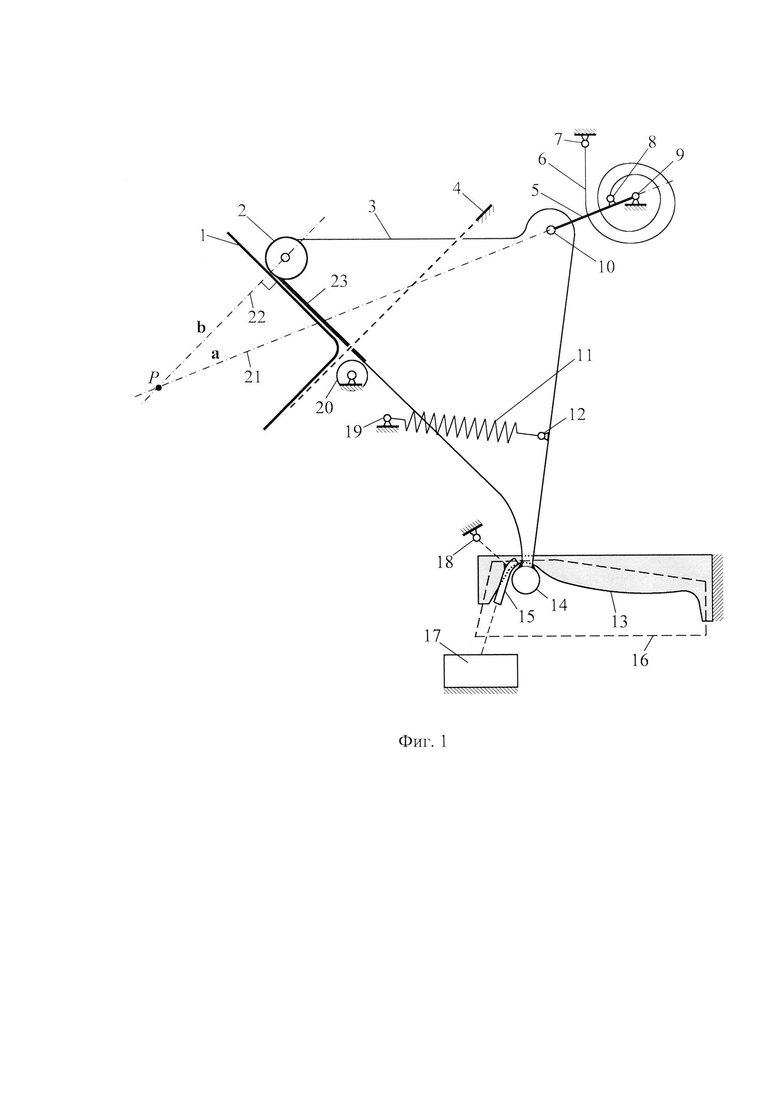
фиг. 1 - кинематическая схема механизма защелок;
фиг. 2 - процесс зацепления запирающего звена и упора;
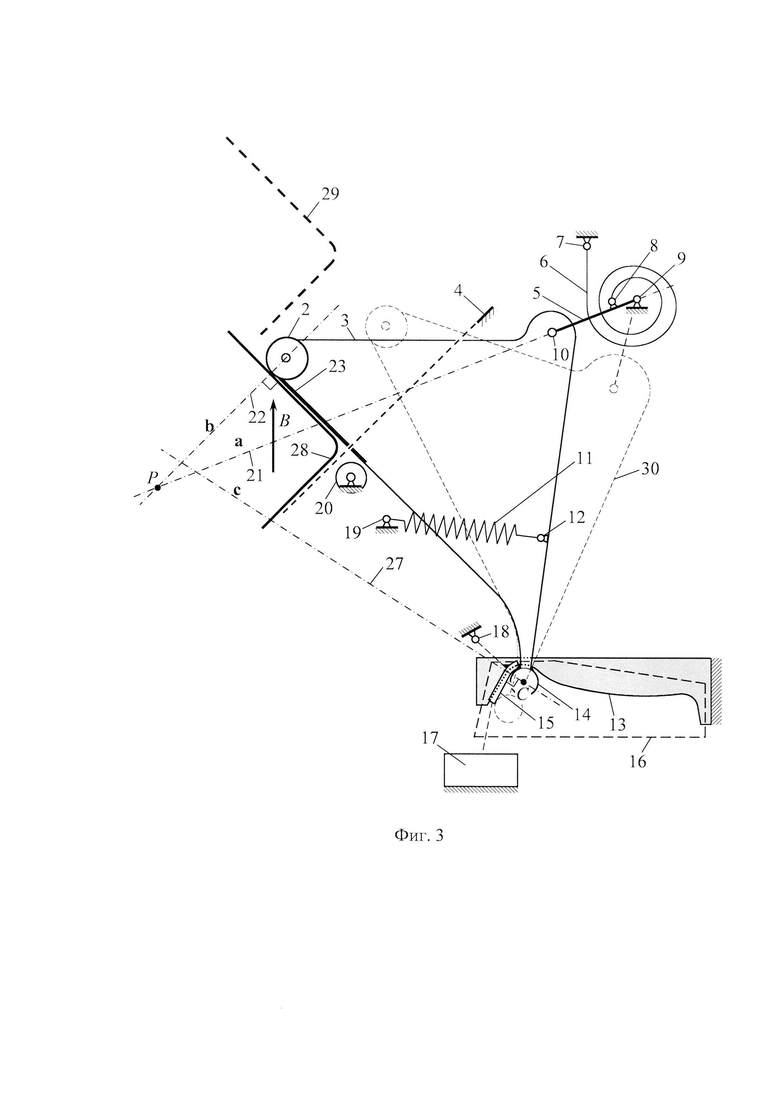
фиг. 3 - процесс расцепления запирающего звена и упора.
На фиг. 1-3 приняты следующие обозначения: 1 - упор, 2 - опорный ролик, 3 - запирающее звено, 4 - корпус, 5 - серьга, 6 - первая пружина, 7 - первый конец первой пружины, 8 - второй конец первой пружины, 9 - первый вращательный шарнир, 10 - второй вращательный шарнир, 11 - вторая пружина, 12 - второй конец второй пружины, 13 - Г-образный паз, 14 - шип, 15 - рычаг, 16 - поступательно-вращательный шарнир, 17 - привод, 18 - третий вращательный шарнир, 19 - первый конец второй пружины, 20 - ограничительный ролик, 21 - первая ось, 22 - вторая ось, 23 - поверхность запирающего звена, предназначенная для упора в ограничительный ролик, 24 - упор до зацепления за запирающее звено, 25 - промежуточное положение запирающего звена при сцепке, 26 - максимально утопленное положение запирающего звена в корпус при сцепке, 27 - третья ось, 28 - положение упора, введенного в зацепление с запирающим звеном, 29 - положение упора, находящегося в расцепленном с запирающим звеном состоянии, 30 - положение запирающего звена при расцеплении с упором.
Механизм защелок содержит (см. фиг. 1) упор 1 треугольной формы, корпус 4, серьгу 5, связанную с корпусом посредством первого вращательного шарнира 9, первую пружину 6, первый конец 7 которой закреплен на корпусе 4, а второй конец 8 - на серьге 5, запирающее звено 3, частично выступающее за пределы корпуса 4 и связанное с серьгой 5 посредством второго вращательного шарнира 10, вторую пружину 11, первый конец 19 которой закреплен на корпусе 4, а второй конец 12 на запирающем звене 3, опорный ролик 2, установленный на конце выступающей за пределы корпуса 4 части запирающего звена 3 и введенный в зацепление с поверхностью упора 1, ограничительный ролик 20, установленный на корпусе 4 с зазором относительно запирающего звена 3 со стороны, противоположной серьге 5, при этом на данном этапе ограничительный ролик 20 не контактирует с поверхностью 23 запирающего звена 3, привод 17, установленный на корпусе 4, рычаг 15, закрепленный одним концом на корпусе 4 посредством третьего вращательного шарнира 18, и являющийся выходным звеном привода 17, поступательно-вращательный шарнир 16 с одной вращательной и двумя поступательными степенями свободы, образованный Г-образным пазом 13, шипом 14, установленном на запирающем звене 3, и рычагом 15.
Рассмотрим работу предлагаемого технического решения на примере механизма защелок, установленного на стыковочном механизме активного стыковочного агрегата космического корабля, выполняющего стыковку.
Во время процесса сцепки упор 24 (см. фиг. 2), расположенный на пассивном стыковочном агрегате космического корабля, к которому выполняется стыковка, движется по стрелке А и надавливает на опорный ролик 2, заставляя запирающее звено 3 утапливаться в корпус 4 через положения 25 и 26 (при максимально утопленном положении 26 запирающего звена 3 опорный ролик 2 не выходит за пределы корпуса 4). При этом шип 14 движется вдоль большей стороны Г-образного паза 13, а первая пружина 6 и вторая пружина 11 взводятся. Опорный ролик 2 предназначен для снижения трения упора о запирающее звено 3 при их взаимодействии, а центр этого ролика однозначно определяет точку приложения внешней силы к запирающему звену 3, действующую со стороны упора. Форма стенки большей стороны Г-образного паза 13, расположенной ближе ко второму вращательному шарниру 10, выполнена в форме дуги выгнутой в сторону, противоположную второму вращательному шарниру 10. Форма дуги определяется траекторией движения шипа 14 при утапливании запирающего звена 3 в корпус 4 до положения 26, причем центр опорного ролика 2 должен двигаться по траектории, близкой к прямой линии. Ограничительный ролик 20 предназначен для поддержания траектории движения центра опорного ролика 2, близкой к прямой линии, и устанавливается на малом расстоянии от поверхности 23 запирающего звена 3, предназначенной для контакта с этим роликом. Ограничительный ролик 20 не должен выходить за пределы корпуса 4.
После того, как упор 24 окажется ниже опорного ролика 2, запирающее звено 3 под действием первой пружины 6 и второй пружины 11 начнет выдвигаться из корпуса 4. Упор 24 продолжает перемещаться но стрелке А в положение 28. После того, как запирающее звено 3 под действием первой пружины 6 и второй пружины 11 максимально выдвинется из корпуса 4, произойдет сцепка, т.к. движению упора из положения 28 против стрелки А будет препятствовать запирающее звено 3 с опорным роликом 2, а по стрелке А - корпус 4. Другие направления перемещения упора из положения 28 не рассматриваются, поскольку они не допускаются конструкцией стыковочных механизмов.
После сцепки запирающее звено 3 с опорным роликом 2 блокирует движение упора против стрелки А из положения 28 (механизм защелок находится в закрытом состоянии), если возникающая при этом контактная сила, действующая со стороны упора через опорный ролик 2 на запирающее звено 3, компенсируется силами реакции серьги 5 и рычага 15, причем силы сопротивления первой пружины 6 и второй пружины 11 не учитываются, т.к. они малы по сравнению с указанными силами реакции и стремятся выдвинуть запирающее звено 3 из-под корпуса 4, т.е. сохранить закрытое состояние механизма защелок. Описанное распределение сил возникает, когда точка Р пересечения первой оси 21 (оси а) и второй оси 22 (оси b) находится ближе к первому вращательному шарниру 9, чем точка пересечения первой оси 21 (оси а) и третьей оси 27 (оси с). Оси связаны с конструкцией механизма защелок следующим образом:
- первая ось 21 (ось а) проходит через центры первого вращательного шарнира 9 и второго вращательного шарнира 10 серьги 5;
- вторая ось 22 (ось b) проходит через ось вращения опорного ролика 2 и по нормали к поверхности упора, введенной в зацепление и контактирующей (см. поз. 28) с опорным роликом 2;
- третья ось 27 (ось с) проходит через ось шипа 14 (точка С) по нормали к поверхности рычага 15, контактирующей с шипом 14.
Запирающее звено 3 с опорным роликом 2 не блокирует движение упора против стрелки А из положения 28 (механизм защелок находится в открытом состоянии), если контактная сила, действующая на запирающее звено 3 со стороны упора через опорный ролик 2, не может быть скомпенсирована силами реакции серьги 5 и рычага 15. Указанное распределение сил возникает, когда третья ось 27 (ось с) пересекает первую ось 21 (ось а) на участке между вторым вращательным шарниром 10 и точкой Р пересечения первой оси 21 (оси а) и второй оси 22 (оси b). В этом случае незначительное сопротивление движению упора из положения 28 против стрелки А будут оказывать только первая пружина 6 и вторая пружина 11, стремящиеся выдвинуть запирающее звено 3 с опорным роликом 2 из-под корпуса 4.
Для перевода механизма защелок из закрытого состояние в открытое привод 17 изменяет угол наклона рычага 15, поворачивая его вокруг третьего вращательного шарнира 18 до тех пор, пока третья ось 27 (ось с) не будет пересекать первую ось 21 (ось а) на участке между вторым вращательным шарниром 10 и точкой Р пересечения первой оси 21 (оси а) и второй оси 22 (оси b).
Для расцепления запирающего звена 3 и упора упор должен сместиться из положения 28 в направлении по стрелке В при нахождении механизма защелок в открытом состоянии (см. фиг. 3) в положение 29. При движении упора по стрелке В из положения 28 он воздействует на запирающее звено 3 через опорный ролик 2, отклоняя их со своей траектории движения под корпус 4 (положение 30 запирающего звена). При этом запирающее звено увлекает за собой серьгу 5, шип 14 скользит вдоль меньшей части Г-образного паза 16 по поверхности рычага 15, а первая пружина 6 и вторая пружина 5 взводятся. После того, как упор окажется выше опорного ролика 2 произойдет расцепление запирающего звена 3 и упора (положение 30 упора). Далее запирающее звено 3 под действием первой пружины 6 и второй пружины 11 начнет выходить из-под корпуса 4. Серьга 5 и шип 14 будут совершать обратное движение.
Для перевода механизма защелок из открытого состояния в закрытое привод 17 изменяет угол наклона рычага 15, поворачивая его вокруг третьего вращательного шарнира 18, и тем самым изменяя положение третьей оси 27 (оси c) до тех пор, пока точка Р пересечения первой оси 21 (оси а) и второй оси 22 (оси b) не будет находиться ближе к первому вращательному шарниру 9, чем точка пересечения первой оси 21 (оси а) и третьей оси 27 (оси с).
Актуальность создания изобретения обуславливается возможностью его использования в составе периферийного стыковочного механизма космического аппарата, например описанного в патенте РФ №2657623 Периферийный стыковочный механизм. Стыковочный механизм состоит из стыковочного кольца, механизмов защелок, шести устройств поглощения энергии (штанг стыковочного механизма) и тросового устройства стягивания. Для образования первичной механической связи (сцепки) с пассивным (ответным) стыковочным агрегатом и для сохранения этой связи на этапах аккумулирования энергии относительного движения КА, выравнивания и стягивания на активном стыковочном агрегате используются механизмы защелок, на пассивном (ответном) стыковочном агрегате - упоры.
Для увеличения хода штоков штанг с целью улучшения условий сцепки и для лучшего выравнивания по крену шарниры штанг, расположенные на стыковочном кольце, должны располагаться как можно ближе друг к другу. Этому препятствует механизм защелок, находящийся в зоне их расположения. Описанный механизм защелок позволяет уменьшить габариты механизма защелок и освободить указанную зону.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2706639C2 |
| МЕХАНИЗМ ПЕРЕЗАРЯЖАНИЯ НЕСАМОЗАРЯДНОГО ПИСТОЛЕТА | 2010 |
|
RU2447387C1 |
| ПЕРИФЕРИЙНЫЙ СТЫКОВОЧНЫЙ МЕХАНИЗМ | 2017 |
|
RU2657623C1 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2662605C2 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОТКРЫТИЕМ-ЗАКРЫТИЕМ ФОНАРЯ САМОЛЕТА | 2004 |
|
RU2255878C1 |
| УСТРОЙСТВО СТЯГИВАНИЯ СТЫКОВОЧНЫХ АГРЕГАТОВ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2706640C1 |
| Загрузочное устройство шиберного типа | 1985 |
|
SU1275176A1 |
| Механизм управления поворотом гусеничного трактора | 1985 |
|
SU1311988A1 |

Изобретение относится к машиностроению, преимущественно к космической технике, к фиксирующим устройствам. Изобретение может применяться в составе периферийного стыковочного механизма космического аппарата. Механизм защелок содержит упор (1) треугольной формы, корпус (4), серьгу (5), связанную с корпусом (4) посредством первого вращательного шарнира (9), первую пружину (6), первый конец (7) которой закреплен на корпусе (4), а второй (8) - на опоре, запирающее звено (3), частично выступающее за пределы корпуса (4) и связанное с серьгой (5) посредством второго вращательного шарнира (10), вторую пружину (11), первый конец (19) которой закреплен на корпусе (4), а второй (12)- на запирающем звене (3), опорный ролик (2), установленный на конце выступающей за пределы корпуса (4) части запирающего звена (3) и введенный в зацепление с поверхностью упора, ограничительный ролик (20), установленный на корпусе (4) с зазором относительно запирающего звена (3) со стороны, противоположной серьге (5), привод (17), установленный на корпусе (4), рычаг (15), закрепленный одним концом на корпусе (4) посредством третьего вращательного шарнира (18) и являющийся выходным звеном привода (17), поступательно-вращательный шарнир (16) с одной вращательной и двумя поступательными степенями свободы. В механизм защелок дополнительно ведены шип (14), расположенный на запирающем звене (3) со стороны, противоположной второму вращательному шарниру (10) и опорному ролику (2), Г-образный паз (13), выполненный в корпусе (4) со стороны от запирающего звена (3), противоположной второму вращательному шарниру (10) и опорному ролику (2). Стенка большей стороны Г-образного паза (13), расположенная ближе ко второму вращательному шарниру, выполнена в форме дуги выгнутой в сторону, противоположную второму вращательному шарниру (10). Меньшая сторона Г-образного паза (13) примыкает к большей стороне Г-образного паза с края, ближайшего точке Р пересечения первой оси (а), проходящей через центры первого (9) и второго (10) вращательных шарниров, и второй оси (b), проходящей через центр опорного ролика (2) по нормали к поверхности упора, введенной в зацепление с опорным роликом (2). Меньшая сторона Г-образного паза (13) выполнена в направлении к первому (9) вращательному шарниру от точки примыкания большей стороны Г-образного паза (13). Рычаг (15) перекрывает меньшую сторону Г-образного паза (13) со стороны, ближайшей точке Р. Шип (14) размещен на меньшей стороне Г-образного паза (13) на минимальном удалении от первого (9) вращательного шарнира. Поступательно-вращательный шарнир (16) образован Г-образным пазом (13), шипом (14) и рычагом (15). Обеспечивается уменьшение габаритов механизма защелок и увеличение зоны допустимого расположения шарниров штанг периферийного стыковочного механизма, находящихся в непосредственной близости от механизма защелок. 2 з.п. ф-лы, 3 ил.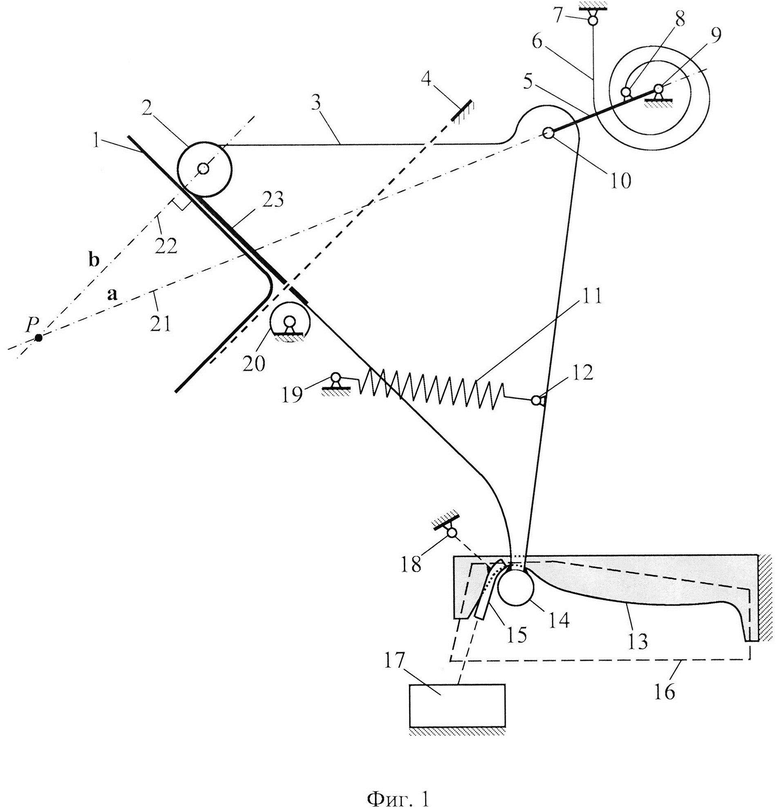
1. Механизм защелок, содержащий упор треугольной формы, корпус, серьгу, связанную с корпусом посредством первого вращательного шарнира, первую пружину, первый конец которой закреплен на корпусе, а второй - на опоре, запирающее звено, частично выступающее за пределы корпуса и связанное с серьгой посредством второго вращательного шарнира, вторую пружину, первый конец которой закреплен на корпусе, а второй - на запирающем звене, опорный ролик, установленный на конце выступающей за пределы корпуса части запирающего звена и введенный в зацепление с поверхностью упора, ограничительный ролик, установленный на корпусе с зазором относительно запирающего звена со стороны, противоположной серьге, привод, установленный на корпусе, рычаг, закрепленный одним концом на корпусе посредством третьего вращательного шарнира и являющийся выходным звеном привода, поступательно-вращательный шарнир с одной вращательной и двумя поступательными степенями свободы, отличающийся тем, что в него введены шип, расположенный на запирающем звене со стороны, противоположной второму вращательному шарниру и опорному ролику, Г-образный паз, выполненный в корпусе со стороны от запирающего звена, противоположной второму вращательному шарниру и опорному ролику, причем стенка большей стороны Г-образного паза, расположенная ближе ко второму вращательному шарниру, выполнена в форме дуги выгнутой в сторону, противоположную второму вращательному шарниру, меньшая сторона Г-образного паза примыкает к большей стороне Г-образного паза с края, ближайшего точке Р пересечения первой оси а, проходящей через центры первого и второго вращательных шарниров, и второй оси b, проходящей через центр опорного ролика по нормали к поверхности упора, введенной в зацепление с опорным роликом, меньшая сторона Г-образного паза выполнена в направлении к первому вращательному шарниру от точки примыкания большей стороны Г-образного паза, причем рычаг перекрывает меньшую сторону Г-образного паза со стороны, ближайшей точке Р, шип размещен на меньшей стороне Г-образного паза на минимальном удалении от первого вращательного шарнира, а поступательно-вращательный шарнир образован Г-образным пазом, шипом и рычагом.
2. Механизм защелок по п. 1, отличающийся тем, что опорой, на которой закреплен второй конец первой пружины, является серьга.
3. Механизм защелок но п. 1, отличающийся тем, что опорой, на которой закреплен второй конец первой пружины, является запирающее звено.
| US 3820741 A, 28.06.1974 | |||
| US 4682745 A, 28.07.1987 | |||
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2706639C2 |
| CN 107108047 A, 29.08.2017 | |||
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |

