Изобретение относится к космической технике, а именно к устройствам крепления полезного груза переносного рабочего места и обеспечения внекорабельной деятельности оператора при дистанционном управлении процессом переноса манипулятором полезного груза и закрепления его на внешней поверхности космического объекта.
Известна кисть манипулятора (Патент США №4955654, 1990) в системе дистанционного управления для захвата объекта, включающая средства захвата объекта со средствами центровки, средства контроля момента, прилагаемого к средствам центровки, средства управления выходным сигналом привода.
Однако указанное средство не позволяет в автоматическом режиме, например при помощи манипулятора, стыковать полезные грузы с приемным узлом или использовать этот узел для закрепления устройства захвата манипулятора в процессе перемещения («шагания») самого манипулятора по поверхности космического объекта.
Наиболее близким по технической сущности к заявляемому изобретению является устройство стыковки типа «штырь-конус» (см. Сыромятников B.C. «Стыковочные устройства космических аппаратов». - М.: Машиностроение, 1984). Оно состоит из двух частей, одна из которых содержит выдвижную штангу с головкой с защелками, оснащенную управляемыми защелками, и выдвигающиеся выравнивающие рычаги, снабженные приводом с шариковинтовой парой, головка установлена на конце штанги с датчиками касания и положения защелок. Другая часть устройства выполнена в виде корпуса с узлом, имеющим внутреннюю коническую поверхность, заканчивающуюся центральным цилиндрическим приемным отверстием со специальными боковыми прорезями для окончательного ориентирования двух стыкующихся объектов и упорами для обеспечения механического захвата. Выполнение операции подтягивания одного космического объекта к другому, выравнивание по тангажу и рысканию до соприкосновения торцов объектов производится одним приводом, а окончательная стыковка до обеспечения силового закрытия стыка с обеспечением герметичности и соединение электро- и гидроразъемов другим приводом.
Описанная выше конструкция предназначена для взаимодействия двух объектов, имеющих большие массово-инерционные характеристики и в начальном периоде стыковки значительные допускаемые рассогласования по углам тангажа и рыскания продольных осей объектов.
Техническим результатом, достигаемым с помощью заявляемого устройства, является обеспечение установки на поверхности космического объекта перемещаемого полезного груза с созданием электрического и механического интерфейсов между грузом и космическим объектом при помощи одного привода манипулятора.
Результат достигается тем, что в активном устройстве фиксации полезного груза преимущественно к корпусу находящегося на орбите космического корабля, содержащем корпус, выравнивающие рычаги и выдвижную штангу, снабженные приводом с шариковинтовой парой, головку с защелками, установленную на конце штанги, датчики касания и положения защелок, в отличие от известного, на стыковочной плоскости корпуса выполнены профилированные направляющие выступы, выдвижная штанга выполнена в виде самотормозящейся пары, взаимодействующей с инструментом манипулятора, и головки, управляемые защелки которой снабжены элементами фиксации положения защелок, в кинематической цепи привода установлена тормозная муфта для фиксации полезного груза, на торце корпуса, противоположном стыковочной плоскости, выполнен такелажный элемент с профилированными выступами и мишень для наведения манипулятора.
Наличие направляющих выступов на активном устройстве фиксации и взаимодействующем с ним пассивном устройстве фиксации позволяет произвести выбор погрешностей подвода устанавливаемого манипулятором полезного груза, закрепленного к активному устройству, и обеспечивает точное совмещение осей и плоскостей стыка устройств для последующего процесса стыковки элементов электросоединителей.
В процессе стыковки двух устройств головка штанги может совершать продольные возвратно-поступательное движения с остановками в следующих положениях, создаваемых прямым или обратным включением или выключением привода манипулятора:
- «конечное» положение, при котором головка захвата втянута и защелки выставлены;
- «исходное» положение, при котором головка захвата выдвинута на определенный размер относительно «конечного» положения, защелки выставлены;
- «переднее» положение, при котором головка захвата выдвинута на определенный размер относительно «исходного» положения, защелки убраны.
Суть изобретения поясняется чертежами, на которых приведены:
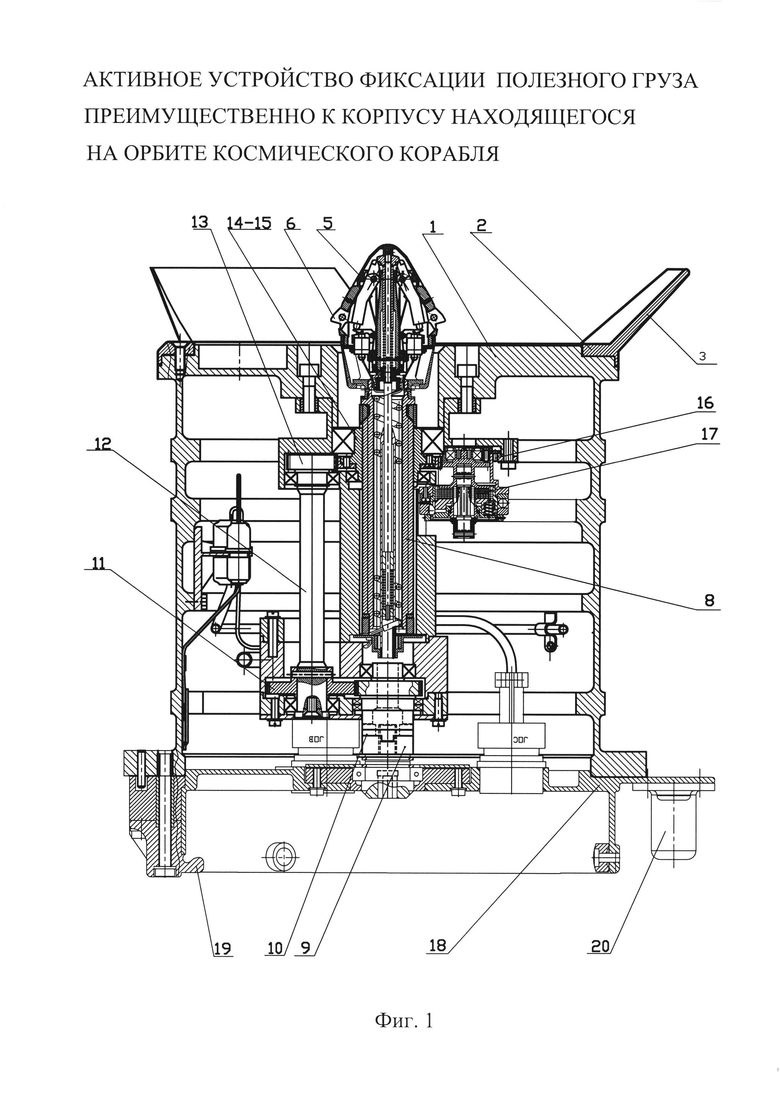
на фиг. 1 - сечение активного устройства фиксации со штангой и головкой;
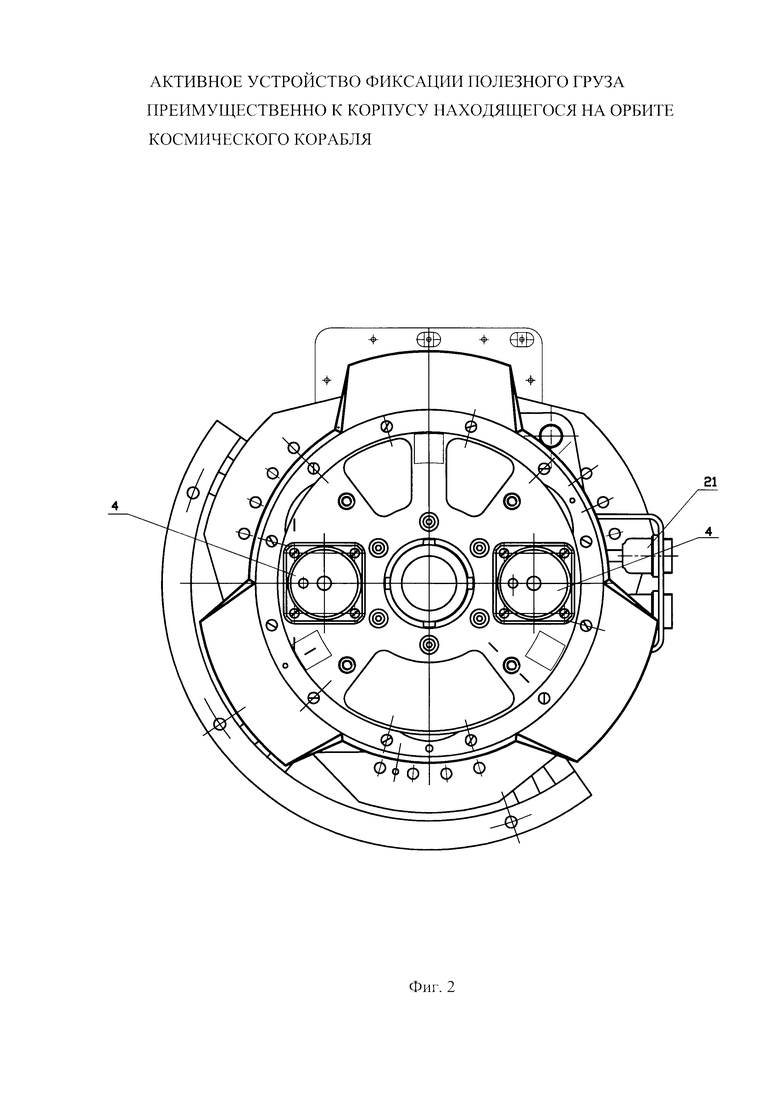
на фиг. 2 - вид на передний торец активного устройства фиксации с электросоединителями.
Предлагаемое устройство содержит корпус 1, к внешней поверхности которого крепится кронштейн для полезного груза, на переднем торце корпуса установлено кольцо 2 с профилированными направляющими выступами 3 и блок вилок электросоединителей 4 для последующей стыковки с блоком розеток электросоединителей взаимодействующего устройства, закрепленного на космическом объекте. Внутри корпуса активного устройства установлен привод в виде штанги, оканчивающийся головкой захвата 5 с защелками 6, и силовая кинематическая передача для выдвижения или втягивания головки 5. Механизм выдвижения 8, приводимый во вращение от внешнего источника, через крестовины 9 и 10, далее через зубчатую пару 11, вал 12, через колесо 13 передает вращение на винтовую самотормозящуюся пару гайка-винт 14-15, выполняющую функцию выдвижения-втягивания головки. На гайке жестко закреплена цилиндрическая шестерня, входящая в зацепление с зубчатым колесом 16, передающим вращение на тормозную муфту 17. Внешний корпус муфты жестко соединен с корпусом 1. Для силового сцепления корпуса заявляемого устройства, например, с устройством захвата манипулятора, на его торце установлен такелажный элемент 18 с профилированными выступами 19. На такелажном элементе 18 установлена мишень 20 для совмещения осей активного и пассивного устройств фиксации. Защелки головки имеют возможность выставляться-убираться в зависимости от требуемого положения относительно пассивного устройства фиксации.
Электрические связи с блока электросоединителей 4 для подключения к электросети полезного груза выведены на плату электросоединителей 21, расположенную на внешней поверхности корпуса, к которой непосредственно пристыковываются ответные электросоединители полезного груза.
Активное устройство фиксации функционирует в следующей последовательности после его закрепления на манипуляторе:
- сближение данного устройства с пассивным устройством фиксации производится с использованием обратной связи по мишени, расположенной на корпусе пассивного устройства. При этом головка активного устройства находится в "конечном" втянутом положении, защелки головки выставлены. Сближение производится до контакта направляющих выступов на корпусах обох устройств с последующим скольжением выступов относительно друг друга и разворотом активного устройства по крепу и тангажу за счет работы приводов манипулятора до совмещения стыков устройств. Затем происходит выдвижение головки до «исходного» положения. При этом защелки головки активного устройства складываются и, пройдя в гнездо пассивного устройства фиксации, выставляются, и дают информацию об образовании механического захвата с одновременной выдачей сигналов о сцепке датчиками защелок головки захвата за упор пассивного устройства фиксации.
Следующим этапом стыковки устройств является процесс образования силового стыка за счет втягивания головки штанги при включении инструмента манипулятора в обратную сторону, головка перемещается к положению "конечное" до контакта защелок головки захвата с упором приемного гнезда пассивного устройства, и, одновременно, головка захвата перемещает подвижную платформу пассивного устройства. Движение платформы продолжается до положения, при котором происходит соединение вилки и розетки электросоединителей.
После отсоединения манипулятора от устройства фиксации активное удержание силового стыка обеих устройств осуществляет тормозная муфта активного устройства.
Расстыковка устройств производится в следующей последовательности:
- для раскрытия стыка вращение инструмента манипулятора происходит в обратном, относительно затяжки, направлении. Выдвижение головки захвата идет из "конечного" положения в "исходное". При этом пружины пассивного устройства перемещают подвижную платформу до "исходного" положения и расстыковывают электросоединители, с одновременным срабатыванием датчиков пассивного устройства фиксации;
- выход головки захвата из пассивного устройства включением инструмента в прямом направлении, головка захвата выдвигается относительно "исходного" положения в "переднее" положение; при этом защелки головки убираются; включением манипулятора на отвод производится вывод устройства фиксации активного из пассивного устройства;
- перевод головки захвата в конечное положение; после вывода головки захвата из приемного гнезда пассивного устройства выполняется включением инструмента манипулятора в обратном направлении для выставления защелок и перевода головки захвата в "конечное" положение.
Литература
1. Патент США №4955654, 1990.
2. Сыромятников B.C. Стыковочные устройства космических аппаратов. М.: Машиностроение, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАССИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583992C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| ИНСТРУМЕНТ ДЛЯ ЗАЖИМА, ПРЕИМУЩЕСТВЕННО ДЛЯ РАБОТЫ В ТРУДНОДОСТУПНЫХ МЕСТАХ | 2003 |
|
RU2243082C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2584042C2 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2706639C2 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2662605C2 |
| УСТРОЙСТВО СТЫКОВКИ КОСМИЧЕСКИХ МОДУЛЕЙ | 2003 |
|
RU2269462C2 |
| ПЕРИФЕРИЙНЫЙ СТЫКОВОЧНЫЙ МЕХАНИЗМ | 2017 |
|
RU2657623C1 |
| АНДРОГИННОЕ СТЫКОВОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКИХ КОРАБЛЕЙ | 2005 |
|
RU2291821C1 |
| ТРАВЕРСА ДЛЯ СТЫКОВКИ КРУПНОГАБАРИТНОГО КОСМИЧЕСКОГО АППАРАТА С РАКЕТОЙ-НОСИТЕЛЕМ, СНАБЖЕННОЙ НАДКАЛИБЕРНЫМ ГОЛОВНЫМ ОБТЕКАТЕЛЕМ | 2007 |
|
RU2362724C2 |
Изобретение относится к средствам и инструментам внекорабельной деятельности. Предлагаемое активное устройство фиксации использует привод инструмента манипулятора. На переднем торце корпуса устройства выполнены профилированные направляющие выступы. Выдвижная штанга выполнена в виде головки и самотормозящейся пары, взаимодействующей с указанным инструментом. Управляемые защелки головки снабжены элементами фиксации. В кинематической цепи привода установлена тормозная муфта для фиксации полезного груза. На заднем торце корпуса выполнен такелажный элемент с профилированными выступами и мишень для наведения манипулятора. Техническим результатом изобретения является создание механизма для многоразовой стыковки, управляемого с помощью одного привода манипулятора. 2 ил.
Активное устройство фиксации полезного груза преимущественно к внешней поверхности находящегося на орбите космического корабля, содержащее корпус, выравнивающие рычаги и выдвижную штангу, снабженные приводом с шариковинтовой парой, головку с защелками, установленную на конце штанги, датчики касания и положения защелок, отличающееся тем, что на стыковочной плоскости корпуса выполнены профилированные направляющие выступы, выдвижная штанга выполнена в виде самотормозящейся пары, взаимодействующей с инструментом манипулятора, и головки, управляемые защелки которой снабжены элементами фиксации положения защелок, в кинематической цепи привода установлена тормозная муфта для фиксации полезного груза, на торце корпуса, противоположном стыковочной плоскости, выполнен такелажный элемент с профилированными выступами и мишень для наведения манипулятора.
| Сыромятников B.C | |||
| Стыковочные устройства космических аппаратов | |||
| М | |||
| Машиностроение, 1984, c.17-36 | |||
| УСТРОЙСТВО КРЕПЛЕНИЯ, ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2193995C2 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2165381C1 |
| US 4955654 А, 11.09.1990 | |||
| US 5040748 А, 20.08.1991 | |||
| US 4177964 А, 11.12.1979. | |||

