Изобретение относится к области автоматизированного мониторинга окружающей среды, а именно состояния атмосферы и льда, с одновременным определением координат собственного местонахождения комплекса и передачей полученной информации по радиоканалу, и может быть использовано в качестве средства мониторинга окружающей среды в зоне движения льда для безопасной проводки судов по северному морскому пути и обеспечения безопасности объектов нефтегазово-промысловой и гидротехнической инфраструктуры на шельфе и в прибрежной зоне в ледовитых морях и в условиях ледяного покрова, в том числе дрейфующего.
Известны системы и устройства дистанционного контроля состояния окружающей среды и ледяного покрова в северных районах (авт. свид. СССР №№1.788.487, 1.818.608; патенты РФ №№2.158.008, 2.170.442, 2.196.347, 2.197.743, 2.319.205, 2.251.128, 2.360.848, 2.404.442, 2.435.136, 2.449.326, 2.460.968, 2.467.347, 2.486.421, 2.526.222; патенты США №№3.449.950, 3.651.345, 5.234.852, 6.137.437; патент ЕР №0.455.842 и др.).
Из известных систем и устройств наиболее близким к предлагаемой системе является «Измерительно-навигационный комплекс, устанавливаемый на лед» (патент РФ №2.486.471, G01C 21/00, 2011), который и выбран в качестве прототипа.
Известный комплекс обеспечивает возможность для проведения мониторинга состояния льда и окружающей среды с одновременным определением координат расположения комплекса, повышение безопасности при проводке судов во льдах.
Технической задачей изобретения является повышение надежности и достоверности дистанционного контроля состояния атмосферы и ледяного покрова в северных районах путем использования спутников-ретрансляторов и сложных сигналов с фазовой манипуляцией.
Поставленная задача решается тем, что система дистанционного контроля состояния атмосферы и ледяного покрова в северных районах, характеризуемая, в соответствии с ближайшим аналогом, наличием установленных в едином термостатируемом корпусе блока управления, блока определения координат по системе спутниковой навигации, блока определения состояния атмосферы, подключенные к передающему устройству, а также блока электропитания, подключенного к энергопотребляющим блокам, причем блок управления выполнен с возможностью включения блоков определения координат по системе спутниковой навигации, определение толщины ледового покрова и определение состояния атмосферы, а также передающего устройства по получению управляющего сигнала, отличается от ближайшего аналога тем, что она снабжена спутниками-ретрансляторами спутниковой системы связи и приемником сложных сигналов с фазовой манипуляцией, причем передающее устройство выполнено в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого соединен с выходом блока управления, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, усилителя мощности и передающей антенны, приемник сложных сигналов с фазовой манипуляцией выполнен в виде последовательно включенных приемной антенны, усилителя высокой частоты, второго смесителя, второй вход которого соединен с первым выходом второго гетеродина, фильтра нижних частот, перемножителя, второй вход которого соединен с выходом усилителя высокой частоты, и фазовый детектор, второй вход которого через фазовращатель на 90° соединен с вторым выходом второго гетеродина, а выход подключен к управляющему входу второго гетеродина, выход фильтра нижних частот подключен к входу блока регистрации и анализа.
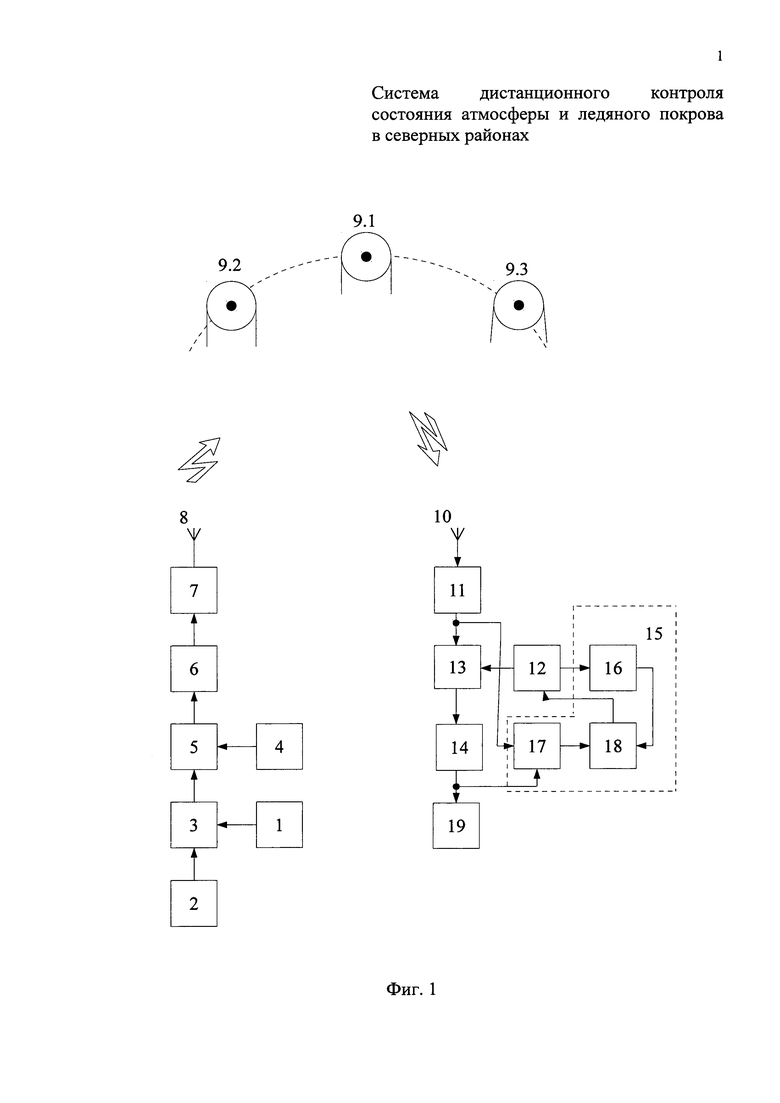
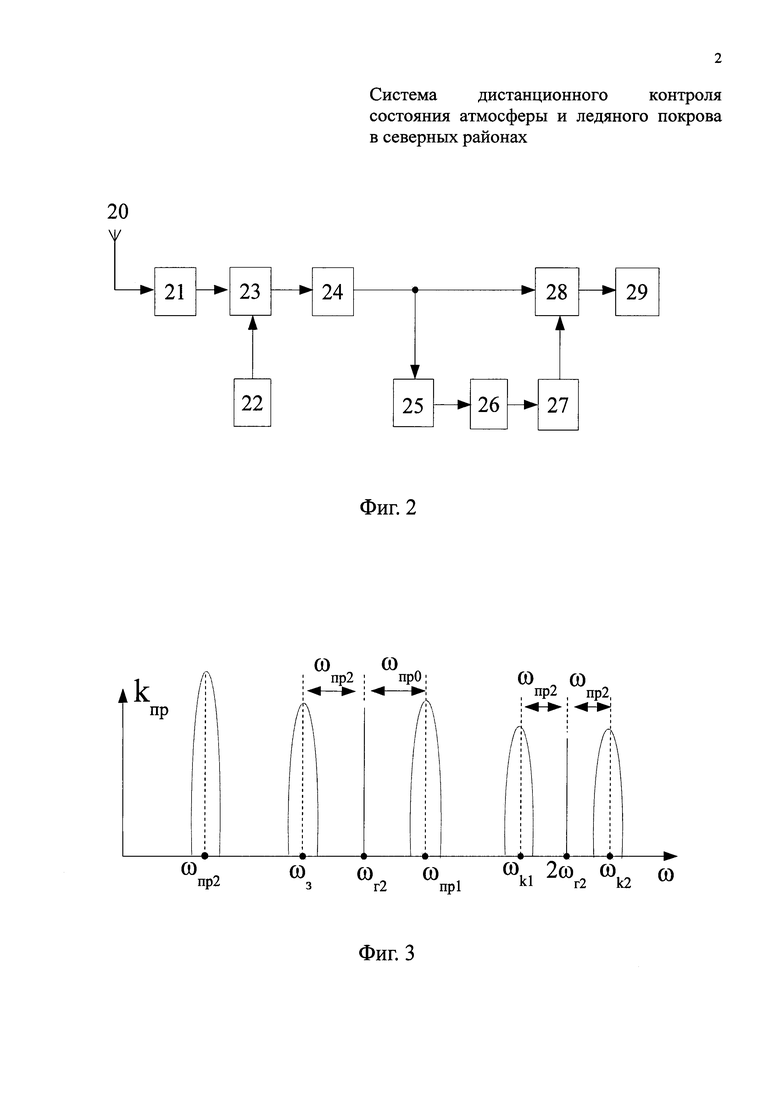
Структурная схема предлагаемой системы представлена на фиг. 1. Структурная схема классического приемника изображена на фиг. 2. Частотная диаграмма, иллюстрирующая образование дополнительных каналов приема, показана на фиг. 3.
Передающее устройство содержит последовательно включенные блок 1 управления, фазовый манипулятор 3, второй вход которого соединен с выходом задающего генератора 2, первый смеситель 5, второй вход которого соединен с выходом первого гетеродина 4, усилитель 6 первой промежуточной частоты, усилитель 7 мощности и передающую антенну 8.
Приемник сложных сигналов с фазовой манипуляцией содержит последовательно включенные приемную антенну 10, усилитель 11 высокой частоты, второй смеситель 13, второй вход которого соединен с первым выходом второго гетеродина 12, фильтр 14 нижних частот, перемножитель 17, второй вход которого соединен с выходом усилителя 11 высокой частоты и фазовый детектор 18, второй вход которого через фазовращатель 16 на 90° соединен с вторым выходом второго гетеродина 12, а выход подключен к управляющему входу второго гетеродина 12.
Фазовращатель 16 на 90°, перемножитель 17 и фазовый детектор 18 образуют фазовую систему автоматической подстройки частоты (ФАПЧ) второго гетеродина 12.
Классический приемник сложных сигналов с фазовой манипуляцией содержит последовательно включенные: приемную антенну 20, усилитель 21 высокой частоты, смеситель 23, второй вход которого соединен с выходом гетеродина 22, усилитель 27 промежуточной частоты, удвоитель 25 фазы, делитель 26 фазы на два, узкополосный фильтр 28, фазовый детектор 28, второй ход которого соединен с выходом усилителя 24 промежуточной частоты, и блок 29 регистрации.
Предлагаемая система дистанционного контроля состояния атмосферы и ледяного покрова в северных районах работает следующим образом.
Сформированный комплекс с заряженной аккумуляторной батареей с борта вертолета сбрасывают на лед. За счет использования конструкции корпуса («ванька-встанька») корпус ориентирован тяжелой нижней частью в стороны ледового покрова акватории. После контакта со льдом по управляющему сигналу блока управления из корпуса выделяется якорная система и вплавляется за счет разогрева от аккумуляторной батареи в поверхность льда. После закрепления корпуса в ледовой поверхности из корпуса поднимается мачта с ветрогенератором и датчиками температуры и влажности воздуха, а также скорости ветра. Одновременно с использованием системы спутниковой навигации происходит определение географических координат нахождения комплекса.
Разработанный измерительно-навигационный комплекс, устанавливаемый на лед, содержит установленные в едином термостатируемом корпусе блок управления, блок определения координат по системе спутниковой навигации, блок определения состояния атмосферы, блок электропитания, подключенный к электропотребляющим блокам. Блок управления может быть выполнен на базе микропроцессора. Блок определения координат по системе спутниковой навигации может быть выполнен на базе систем спутниковой навигации GPS и ГЛОНАСС. В качестве блока электропитания может быть использована аккумуляторная батарея, предпочтительно выполненная с возможностью подзарядки. Корпус комплекса преимущественно выполнен с возможностью установки с борта летательного аппарата или плавсредства. Он выполнен со смещенным центром тяжести, что обеспечивает вертикальное фиксирование комплекса на льдине. Корпус может содержать вплавляемую в лед, за счет действия аккумуляторной батареи, якорную систему. Якорная система может быть выполнена в виде штанги, вплавляемой в лед. В этом случае штанга может быть использована в качестве средства измерения толщины льда. Кроме того, на штанге может быть закреплен один из элементов термопары (второй элемент расположен над поверхностью льда), при этом генерированной термопарой электрический заряд поступает в аккумуляторную батарею. Также для подзарядки аккумуляторной батареи может быть использован ветрогенератор, закрепленный на выдвигаемой матче, в верхней части корпуса. Мачта может быть также использована в качестве антенны передающего устройства.
В зависимости от условий эксплуатации и назначения комплекса блок управления может быть выполнен с возможностью включения блоков определения координат по системе спутниковой навигации, определения толщины ледового покрова и определения состояния атмосферы.
Каждый используемый комплекс имеет свой индивидуальный код (идентификационный номер - ID), который приведен во всех радиограммах, отправляемых комплексом. Желательно, чтобы блок управления мог контролировать и состояние аккумуляторной батареи с передачей информации об ее состоянии на стационарный пост мониторинга.
Разработанный комплекс обеспечивает выполнение следующих функций:
- прием сигналов от навигационных спутниковых группировок;
- передача в эфир (по каналам спутниковой связи) собираемых данных в режиме онлайн (в заданное время);
- о собственной координате в настоящее время;
- о толщине льда, на котором он находится в текущее время;
- о скорости ветра, давлении, влажности и температуре.
Установка и использование комплексов на заданном расстоянии обеспечивает возможность создания сети информационных комплексов в системе контроля движения льда и его состояния для безопасной проводки судов по северному морскому пути и обеспечения безопасности объектов нефтегазопромысловой и гидротехнической инфраструктуры на шельфе и в прибрежной зоне в ледовитых морях и в условиях ледяного покрова, в том числе дрейфующего.
Основной особенностью системы, создаваемой при использовании устанавливаемых на лед комплексов, является возможность обеспечивать точный технический контроль состояния льда, его толщины, что позволяет при использовании специальных программных продуктов сделать точный прогноз времени и качества формирования торосов, смещения льда и образования непроходимых для ледокольного флота ледовых условий.
Полученная информация в блоке 1 управления переводится в числовой код М(t) и подается на первый вход фазового манипулятора 3, на второй вход которого подается гармоническое колебание, сформированное задающим генератором 2.
uc(t)=Uc⋅Cos(ωct+ϕс), 0≤t≤Тс,
где Uc, ωс, ϕс, Тс - амплитуда, несущая частота, начальная фаза и длительность гармонического колебания.
На выходе фазового манипулятора 3 образуется сложный сигнал с фазовой манипуляцией (ФМн)
u1(t)=Uc⋅Cos[wct+ϕк(t)+ϕс], 0≤t≤Тс,
где ϕк(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом М(t);
который поступает на первый вход первого смесителя 5, на второй вход которого подается напряжение первого гетеродина 4
Uг1(t)=Uг1⋅Cos(ωг1t+ϕг1).
На выходе первого смесителя 5 образуются напряжения комбинационных частот. Усилителем 6 выделяется напряжение первой промежуточной частоты
Uпр1(t)=Uпр1⋅Cos[wпр1t+ϕк(t)+ϕпр1], 0≤t≤Тс,
где  ;
;
ωпр1=ωс-ωг1 - первая промежуточная частота;
ϕпр1=ϕс-ϕг1;
которое после усиления в усилителе 7 мощности поступает в передающую антенны 8, излучается в эфир и через спутник-ретранслятор 9i (i=1, 2, …, n) поступает на вход приемной антенны 10, а затем через усилитель 11 высокой частоты на первый вход второго смесителя 13, на второй вход которого подается напряжение второго гетеродина 12
uг2(t)=Uг2⋅Cos(ωг2t+ϕг2).
На выходе смесителя 13 образуется напряжение комбинационных частот.
Так как частота ωг2 гетеродина 12 выбирается равной частоте ωпр1 принимаемого сигнала (ωг2=ωпр1), то фильтром 14 нижних частот выделяется низкочастотное напряжение (напряжение нулевой частоты)
uн(t)=Uн⋅Cosϕк(t), 0≤t≤Тс,
где  ,
,
пропорциональное модулирующему коду М(t).
Это напряжение фиксируется и анализируется в блоке 19 регистрации и анализа.
Следует отметить, что выбор частоты ωг2 второго гетеродина 12, равной частоте ωпр1 принимаемого ФМн сигнала (ωг2=ωпр1), обеспечивает совмещение двух процедур: преобразование принимаемого ФМн сигнала на нулевую частоту и выделение низкочастотного напряжения, пропорционального модулирующего коду М(t), т.е. синхронное детектирование принимаемого ФМн сигнала с помощью гетеродина 12, смесителя 13 и фильтра 14 нижних частот. Такая схемная конструкция позволяет избавиться от дополнительных каналов приема (зеркального канала на частоте ωз, первого ωк1 и второго ωк2 комбинационных каналов).
Так как частота ωпр1 принимаемого ФМн сигнала может изменяться под воздействием различных дестабилизирующих факторов, в том числе и эффекта Доплера, то для выполнения и поддержания равенства ωг2=ωпр1 используется система фазовой автоматической подстройки частоты (ФАПЧ) 15, состоящая из фазовращателя 16 на 90°, перемножителя 17 и фазового детектора 18.
Таким образом, предлагаемая система по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение надежности и достоверности дистанционного контроля состояния окружающий среды и ледяного покрова в северных районах. Это достигается за счет использования спутников-ретрансляторов спутниковой системы связи сложных сигналов с фазовой манипуляцией.
Следует отметить, что классический приемник сложных ФМн сигналов (схема А.А. Пистолькорса, фиг. 2) содержит преобразователь частоты и демодулятор ФМн сигналов.
Преобразователь частоты содержит приемную антенну 20, усилитель 21 высокой частоты, второй гетеродин 22, смеситель 23 и усилитель 24 второй промежуточной частоты. Ему свойственно наличие дополнительных каналов приема (зеркального на частоту ωз, первого ωк1 и второго ωк2 комбинационных каналов приема).
Демодулятор сложных ФМн сигналов содержит удвоитель 25 фазы, делитель 26 фазы на два, узкополосный фильтр 27, фазовый детектор 28 и блок 29 регистрации. Ему свойственно наличие «обратной работы», которое связано с тем, что опорное напряжение, необходимое для синхронного детектирования принимаемого ФМН сигнала, выделяется непосредственно из самого принимаемого ФМн сигнала. При этом отсутствует признак, который позволил бы «привязать» фазу опорного напряжения к одной из фаз принимаемого ФМн сигнала. Поэтому под действием помех и других дестабилизирующих факторов фаза опорного напряжения в случайные моменты времени может занимать одно из двух возможных значений, что и является причиной возникновения явления «обратной работы».
Наличие ложных сигналов (помех), принимаемых по дополнительным каналам, и явление «обратной работы» приводят к снижению надежности и достоверности дистанционного контроля состояния окружающей среды и ледяного покрова.
Предлагаемый приемник лишен указанных недостатков.
Сложные ФМн сигналы обладают высокой помехоустойчивостью, энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Указанные сигналы открывают новые возможности в технике передачи сообщений. Они позволяют применять новый вид селекции - структурную селекцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного контроля состояния атмосферы и ледяного покрова в северных районах | 2019 |
|
RU2712794C1 |
| Компьютерная система дистанционного управления навигационными комплексами для автоматизированного мониторинга окружающей среды в условиях Арктики | 2017 |
|
RU2681671C1 |
| Компьютерная система дистанционного управления навигационными комплексами для автоматизированного мониторинга окружающей среды в условиях Арктики | 2019 |
|
RU2723928C1 |
| Компьютерная система дистанционного управления навигационными комплексами для автоматизированного мониторинга окружающей среды в условиях Арктики | 2019 |
|
RU2732318C1 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
| Система мониторинга состояния льда и окружающей среды | 2019 |
|
RU2715845C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2362981C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2464592C1 |
| Способ контроля транспортных средств и устройство для его осуществления | 2020 |
|
RU2745459C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2480728C2 |
Изобретение относится к системам для дистанционного контроля состояния окружающей среды. Сущность: система содержит блок управления, блок определения координат по системе спутниковой навигации, блок определения состояния атмосферы, блок определения толщины ледяного покрова, блок электропитания, установленные в термостатируемом корпусе. При этом система снабжена спутниками-ретрансляторами (9.1-9.3) спутниковой системы связи, передающим устройством и приемником сложных сигналов с фазовой манипуляцией. Передающее устройство состоит из блока (1) управления, задающего генератора (2), фазового манипулятора (3), гетеродина (4), смесителя (5), усилителя (6) первой промежуточной частоты, усилителя (7) мощности, передающей антенны (8). Приемник сложных сигналов с фазовой манипуляцией состоит из приемной антенны (10), усилителя (11) высокой частоты, гетеродина (12), смесителя (13), фильтра (14) нижних частот, фазовращателя (16) на 90˚, перемножителя (17), фазового детектора (18), блока (19) регистрации и анализа. Технический результат: повышение достоверности контроля состояния атмосферы и толщины ледяного покрова. 3 ил.
Система дистанционного контроля состояния атмосферы и ледяного покрова в северных районах, характеризуемая наличием установленных в едином термостатируемом корпусе блока управления, блока определения координат по системе спутниковой навигации, блока определения состояния атмосферы, подключенных к передающему устройству, а также блока электропитания, подключенного к энергопотребляющим блокам, причем блок управления выполнен с возможностью включения блоков определения координат по системе спутниковой навигации, определения толщины ледяного покрова и определения состояния атмосферы, а также передающего устройства по получению управляющего сигнала, отличающаяся тем, что она снабжена спутниками-ретрансляторами спутниковой системы связи и приемником сложных сигналов с фазовой манипуляцией, причем передающее устройство выполнено в виде последовательно включенных задающего генератора, фазового манипулятора, второй вход которого соединен с выходом блока управления, первого смесителя, второй вход которого соединен с выходом первого гетеродина, усилителя первой промежуточной частоты, усилителя мощности и передающей антенны, приемник сложных сигналов с фазовой манипуляцией выполнен в виде последовательно включенных приемной антенны, усилителя высокой частоты, второго смесителя, второй вход которого соединен с первым выходом второго гетеродина, фильтра нижних частот, перемножителя, второй вход которого соединен с выходом усилителя высокой частоты, и фазового детектора, второй вход которого через фазовращатель на 90° соединен с вторым выходом второго гетеродина, а выход подключен к управляющему входу второго гетеродина, выход фильтра нижних частот подключен к входу блока регистрации и анализа.
| ИЗМЕРИТЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТАНАВЛИВАЕМЫЙ НА ЛЕД | 2011 |
|
RU2486471C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| Способ определения состояния ледяного покрова | 1988 |
|
SU1788487A1 |

