Изобретение касается электронного управляющего устройства исполнительными элементами рыбообрабатывающей машины.. - .. ....;.Известно электронное управляющее устройство с исполнительными элементами рыбообрабатывающей машины, содержащее запоминающие, логические и управляющие элементы для измерительных параметров рыбы.
Целью изобретения является повышение экономии обработки рыбы.
Эта цель достигается тем, что электронное управляющее устройство с исполнительными элементами рыбообрабатывающей машины содержит соединенные между собой через блоки усиления сигналов и согласования центральную вычислительную машину и периферийную схему вычислительной машины, а также входной и выходной блок, при этом запоминающие логические и управляющие элементы, периферийная схема и блоки усиления сигналов и согласования образуют блок управления, причем последний соединен с входным и выходным блоками.
Вследствие компактности устройства, которое может быть расположено непосредственно на рыбообрабатывающей машине или внутри нее, все без исключения режимы работы и значения сигналов, а также правильная последовательность операций могут контролироваться визуально даже необученным персоналом благодаря тому, что входной и выходной блоки содерON Ю Ь СП
CJ
жат оптические элементы, выполненные преимущественно в виде светодиодов. С помощью такой индикации можно локализо- ванно контролировать работу областей управления памятью и рыбообрабатывающей машиной. При этом для постоянного контроля процесса измерения рыбы выходной блок содержит схему индикации размеров рыбы с регистром, декодирующим каскадом и многопозиционной сегментной индикацией размеров рыб.
Подверженность электронного управляющего устройства воздействию помех может быть устранена,помимо разграничения сфер частей схемы и создания функционально самостоятельны/ входного и выходного блоков, распол: иых во внешней периферийной части устройства, еще и тем, что входной и выходной блоки содержат элементы для гальванической развязки, предпочтительно оптоэлектронные элементы связи. Их время связи может быть просто согласовано со временем измерения размеров рыбы и скоростью импульсных сигналов, и они имеют обеспечивающую устранение помех характеристику сглаживания или характеристику фильтра.
Не искаженный воздействиями окружающей среды электронный принцип действия может быть обеспечен благодаря тому, что входной блок содержит схему предварительной обработки сигналов и формирования импульсов.
Согласование с целью выработки и передачи сигналов между управляющим устройством и блоками мощности достигается благодаря тому, что оно содержит входную инвертирующую логическую схему НЕ- ИЛИ и последовательно соединенные инвертирующий задающий генератор, временной каскад и двухтактный выходной каскад.
Чтобы с целью позиционирования инструментов можно было подать на исполнительный механизм или на усилитель шагового электродвигателя особо защищенные от помех необходимые сигналы управления, выходной блок содержит схему формирования сигналов и двухтактный выходной каскад с термическими средствами контроля, а также схему управления механизмом транспортировки рыбы и приводом инструментов с выходным каскадом мощности.
При этом особенно целесообразно защищать выходной каскад мощности от перегрузок с помощью схемы ограничения тока.
На фиг. 1 изображена блок-схема предлагаемого устройства: на фиг. 2 - блок-схема устройства, работающего согласованно с рыбообрабатывающей машиной: на фиг. 3 - монтажная схема устройства; на фиг. 4 (а-о) - диаграммы сигналов управления, а также
входных и выходных сигналов устройства; на фиг, 5 - схема управления для сигналов входных параметров; на фиг. 6 - схема генерации импульсов пути транспортировки рыбы: на фиг. 7 - схема ввода результатов
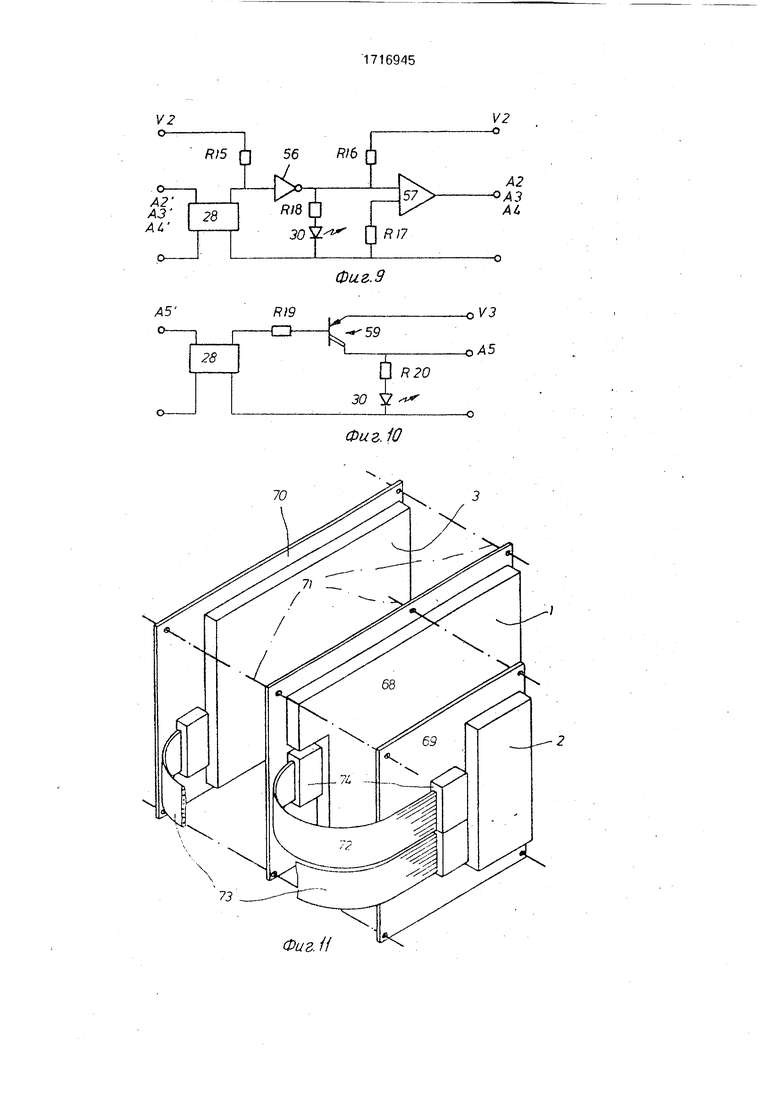
0 измерения рыбы; на фиг. 8 - схема генерации исполнительных импульсов шагового электродвигателя; на фиг. 9 - схема управления режимом работы шагового электродвигателя и механизма транспортировки
5 рыбы; на фиг. 10-схема управления приводом инструментов и/или механизмом транспортировки рыбы; на фиг. 11 - конструктивный блок с платами устройства со снятым кожухом.
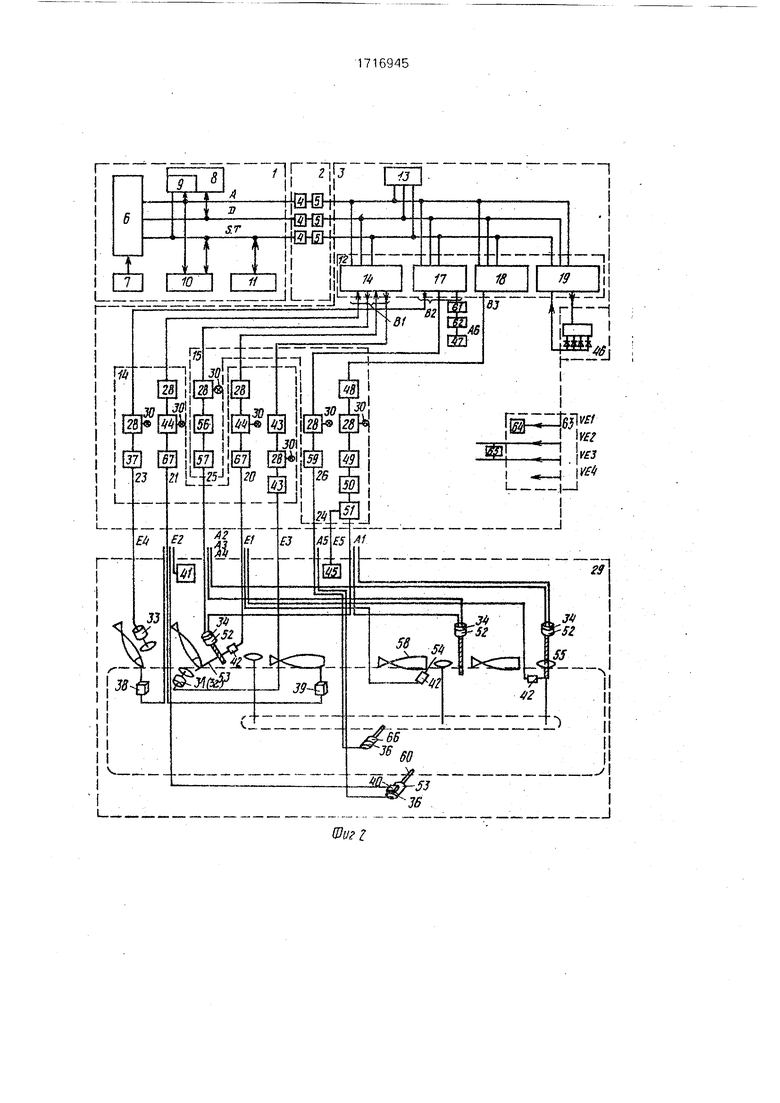
0Управляющее устройство (фиг. содержит вычислительную машину 1, образующую блок центрального процессора, т.е. центральный блок обработки и переработки данных, имеющих усилитель 4 сигналов и
5 схему 5 согласования, конструктивный блок 2, а также конструктивный блок 3 в качестве периферийной схемы, которая через конструктивный блок 2 подключена к вычислительной машине 1.
0Вычислительная машина 1 состоит в основном из микропроцессора 6, кварцевой стабилизации 7, оперативного запоминающего устройства 8, аппаратуры 9 регенера- ционной логики,- адресного кодирования с
5 системой управляющей логики 10 и управления прерываниями 11.
Вычислительная машина 1 работает на основе системы двоичных чисел. Ее рабочий диапазон определяется следующими дан0 ными: регистр - центральный процессор 16 бит/32 бита, адресация - 23 бита и статическое динамическое запоминающее устройство емкостью 64 к х 16. Ввод и вывод происходит через шестнадцать параллель5 ных линий передачи данных и семь линий управления. Скорость действия лежит в области мегагерц и обеспечивает ввод данных импульсами, синхронными с транспортировкой рыбы со скоростью один импульс на
0 0,7 мм продвижения рыбы при пропускании
способности до 120 рыб в минуту, причем три инструмента могут быть настроены в зависимости от обстоятельств каждый в отдельности или все одновременно на работу
5 с частотой до 10 кГц, в то время как требующиеся для работы вводы и выводы продолжают далее обслуживать машину,
Периферийная схема содержит блок 12 управления с подключенным к ней параллельно запоминающим устройством 1.3 с
программами пользователя и контрольными программами, входной блок 14, а также выходной блок 15. Блок 12 управления выполнен с запоминающими и логическими связующими элементами схемы 16-19. Входной блок 14 оснащен схемами 20 и 21 ввода управляющих параметров (предварительной обработки сигналов), схемой 22 генерации входных импульсов (формирования импульсов), а также схемой 23 ввода данных измерения рыбы. Выходной блок 15 содер жит схему 24 генерации импульсов управления шаговым электродвигателем, схему 25 управления режимом шагового электродвигателя, схему 26 управления механизмом транспортировки рыбы и приводом инструментов и схему 27 индикации размеров рыбы.
Конструктивные блоки или части схемы соединены друг с другом с помощью шины, обеспечивающей управляемую передачу данных и обмен данными. В частности, запоминающее устройство 13 и регистры элементов схемы 16-19 соединены со схемой 5 согласования с помощью линии управления S для активизации необходимого не- посредственно для эксплуатации функционального узла, для определения потока данных для вычислительной машины или для установления исходного положения конструктивного элемента с помощью ли- ний передачи данных D, задающих и считывающих данные (например, частоту следования импульсов управления шаговым электродвигателем, измеренные величины, значения показаний, управляющие данные), с помощью линий передачи тактовых импульсов Т, задающих рабочий такт и такт синхронизации, с помощью адресных линий А, а также с помощью линий передачи контрольных программ. Таким образом, за- поминающие и связующие элементы схемы 16, 17, 18 и 19 управляются с помощью универсальных линий считывания (записи в режиме работы ввода или вывода данных или сигналов), так что входные-выходные венти- ли (Ports) элементов схемы могут быть активизированы все без исключения или по отдельности в соответствии с необходимостью. Соответственно линии В1, В2, ВЗ снабжены указателями направления, кото- рые отображают поток данных.
Устройство загружается и управляется с помощью определенных групп сигналов Е1. Е2, ЕЗ, Е4, Е5, относящихся к схемам 20, 21 и 23 ввода, и к схемам 22 и 24 генерации. Схемы 24, 25 и 26 выдают группы сигналов А1.А2, A3, А4иА5.
Схемы 20-23 или 24, 25 и 26 входного и выходного блоков 14 и 15 оснащены схемами с оптоэлектронными элементами 28 связи. Эти устройства передачи сигналов предназначены для гальванической развязки между электрическими чувствительными областями управления (область управления вычислительной машины / область управления запоминающих устройств) и соединены с рыбообрабатывающей машиной в области управления рыбообрабатывающей машиной 29. Оптоэлектронные элементы 28 связи работают по принципу передатчик-приемник, так что они имеют характеристику сглаживания или фильтрации и они согласованы с сигналом или частотой следования импульсов. Таким образом, они обеспечивают гальваническую развязку и согласование между уровнями сигналов, например 5 В для области управления запоминающих устройств и 24 В для поступающих в управляющее устройство или выдаваемых им управляющих сигналов, так что, в частности, блок 12 управления свободен от помех, а помехи изнутри управляющего устройства не передаются в его внешние области.
В сигнальных линиях входного и выходного блоков 14 или 15 в качестве индикатора оптических элементов 30 предусмотрены светодиоды, чтобы можно было визуально и просто контролировать появление, прохождение и последовательность всех без иск- лючения сигналов в управляющем устройстве.
Защищенное от помех управляющее устройство (фиг. 2 и 3) в рыбообрабатывающей машине содержит датчики или чувствительные элементы 31, 32 и 33 сигналов и блоки 34 и 35 мощности шагового электродвигателя или реле 36 механизма транспортировки рыбы и привода 66 инструментов.
Устройство кодирования угловых координат создает шестиканальный образец бита Е4, который соответствует специфической для рыбы, т.е. зависящей от рыбы величине, например толщине рыбы. Этот образец сигнала Е4 через элемент схемы 37 стабилизации и подавления помех и через предназначенный для гальванически раздельной передачи оптоэлектронный элемент 28 связи попадает в запоминающий и логический связующий элемент схемы 17 блока 12 управления.
Соответствующие толщине рыбы сигналы подаются в вычислительную машину 1 в соответствии с величиной входных управляющих сигналов Е2, которыми нагружается схема 21 ввода. Сигналы Е2 содержат пусковой сигнал тактового переключателя 38, который определяет установленный момент измерения, сигнал опроса определенного положения рыбы опрашивающего переключателя 39, переключатель 40 для выдачи разрешающего или пускового сигнала, в соответствии с которым вычислительная машина 1 принимает соответствующий толщине рыбы сигнал, а также датчики 41 контрольных сигналов типа машины, благодаря опросу которых приводятся е действие определенные соответствующие типу машины инструменты. Управляющее устройство запускается через схему 20 ввода посредством сигналов Е1 контроля нулевого положения шагового электродвигателя, приходящих с сигнального переключателя 42 нулевого положения для рабочего режима инструмента. Контроль транспортировки рыбы осуществляется с помощью вырабатываемых датчиками 32 тактовых импульсов, синхронных с транспортировкой, которые подаются на схему 22 генерации входных импульсов. Эта схема содержит схему 43 формирования импульсов, с помощью которой сигналы формируются таким образом, что дальше передаются только существенные для транспортировки рыбы сигналы, Выходы схем 20, 21 и 22 соединены с запоминающим и логическим связующим элементов схемы 16. Для стабилизации и подавления составляющих помех схемы 20, 21 и 23 ввода содержат схемы стабилизации и подавления помех или избирательные схемы, которые объединены в схемный блок 44 стабилизации и подавления помех и селективную схему 45.
В соответствии с входными управляющими сигналами при каждом замыкании контактов переключателя 38 тактовых импульсов вычислительной машиной выявляются данные о размерах рыбы, опрошенные в данном случае при помощи устройства кодирования угловых координат, приводится в действие механизм установки положения рыбы и устанавливаются в рабочее положение инструменты для отделения головы, боковых частей и плавников. Способ выявления этих величин зависит от имеющейся в запоминающем устройстве 13 механизма транспортировки рыбы программы пользователя, которая имеет вид схематического представления процесса расчета и состоит из набора операторов или формальных правил, которые могут быть зафиксированы для автоматического выполнения программы. Таким образом, этот процесс обработки данных всключает в себя конечное число операторов, таких как начальный и конечный оператор, которые при одинаковых начальных условиях выдают одинаковые выходные данные, и для каждого процесса создают по меньшей мере одно значение выходных данных. При такой системе управления формулируют алгоритм в
виде серии команд электронной обработки данных (инструкций). Таким образом в практике вычислительной техники составляется компьютерная программа, которая для данного типа машины всегда работает по такой же схеме и которая задается в виде математического обеспечения для каждой системы управления и содержит опрос датчиков 41 типа машины и преселективного позицион0 ного блока переключателей 46. При помощи математического обеспечения вычисленные данные откладываются в оперативную память запоминающего устройства 8 и соответ- ственнр выдаются для обработки на
5 переключательные схемы 16, 17 и 18 с помощью датчика 32 тактовых импульсов, синхронизированного с механизмом транспортировки рыбы, причем переключательная схема 16 накапливает статические
0 сигналы А2, A3 и А4, переключательная схема 17 статические сигналы А5 и индикацию 47. Переключательная схема 18 накапливает в каждом вспомогательном регистре и в каждом счетном регистре величину для каждого
5 приводного импульса, который автономно обрабатывается, определяется для исполг нительных импульсов и в соответствии с накоплением в регистре и пробелами регистра запоминающего и связующего элемента
0 схемы 18 блока 12 управления подается в схему 24 генерации исполнительных импульсов шагового электродвигателя. Эта схема содержит входную инвертирующую логическую схему 48 (вентиль Исключаю5 щее ИЛИ) для выработки импульсов при каждой смене фронта сигнала, которым определяется скорость действия рыбообрабатывающих инструментов, инвертирующий задающий генератор 49, предназначенный
0 для переработки сигналов, временной каскад 50, который выдает импульс необходимой длительности для приведения в действие шагового электродвигателя, а также двухтактный выходной каскад 51 для вы5 дачи исполнительных импульсных сигналов А1. С целью предотвращения несчастных случаев при открывании защитных решеток машины и т.п. двухтактный выходной каскад 51 настраивается с помощью элемента элек0 трической схемы 45 сигналом Е5, чтобы блокировать этот каскад, так что в этом случае на блоки мощности 34 шагового электродвигателя больше не подаются исполнительные импульсы (сигналы) А1 и шаговые электро5 двигатели 52 находятся под воздействием только тормозящего момента.
Для позиционирования инструментов рыбообрабатывающей машины, а именно инструмента 53-55 соответственно, отделяющего голову, боковые части и плавники, в
запоминающем и связующем элементе схемы 16 накапливаются данные для управления шаговым электродвигателем, касающиеся направления вращения A3, снятия возбуждения А2, т.е. устранения тормозящего момента и возврата в исходное положение А4, в данном случае стационарно через оптоэлектронный элемент связи 28 схемы 25 передаются в подключаемую область управления машины. Схема 56 обеспечивает переработку сигналов, так что только сигналы определенного уровня, которые, в частности, выше 8 В, обрабатываются двухтактным выходным каскадом 57 и, защищенные этим от помех, также подаются на низкоомные исполнительные механизмы 58 шагового электродвигателя, т.е. на блок 35 мощности и его шаговые электродвигатели 52. О наличии помехи в испол- нительных инструментах сообщает соответствующий переключатель 42 нулевого положения шагового электродвигателя, и это учитывается при управлении схемой 20. Таким образом, параллельно с исполнительными импульсами (сигналами) А1 шагового электродвигателя подаются сигналы A3. соответствующие направлению вращения шагового электродвигателя. Сигнал направления вращения A3 шагового электродвигателя побуждает блок 35 мощности шагового электродвигателя с шаговым электродвигателем 52 выполнить несколько попыток, чтобы достичь исходное положение. В это время электродвигатель механизма транспортировки рыбы стопорится. Если шаговый электродвигатель не достигает своего желаемого исходного положения, контролируемого сигнальным переключателем 42 нулевого положения, управляющие данные запоминающего и связующего элемента схемы 16 обеспечивают TQ, чтобы с помощью сигнала снятия возбуждения А2 шагового электродвигателя снять возбуждение с подверженного действию помех инструмента, и таким образом этот инструмент не имеет больше тормозящего момента, в то время как сигнал А5 через силовое реле 36 электродвигателя отключает также приводной двигатель дискового ножа вследствие наличия управляющего сигнала запоминающего и логического связующего элемента схемы 17, который управляет выходной схемой 26. Сигналы возврата в исходное положение А4 шагового электродвигателя постоянно обеспечивают безошибочное положение коммутационных элементов в блоках мощности шагового.электродвигателя, так что, в частности, после включения сетевого литания не возникают никакие нежелательные развозбужденные состояния.
Схема 26 управления механизмом транспортировки рыбы и приводом инструментов 5 содержит выходной каскад 59 с электронными переключателями, выполненными, в частности, в форме транзисторов Дарлингтона. От запоминающего и логического связующего элемента схемы 17 через оптоэлектронный
0 элемент 28 связи управляющие данные подаются в выходной каскад 59, так что этот каскад вырабатывает сигналы А5 управления режимом работы машины, в частности сигнал переключения приводного двигателя
5 инструмента, а также сигнал переключения механизма транспортировки рыбы. Такой сигнал, в частности, имеет уровень напряжения 24 В и допускает ток, который пригоден для того, чтобы управлять
0 исполнительным элементом, например силовым реле 36 электродвигателя таким образом, чтобы по соответствующей команде управления останавливался привод механизма транспортировки рыбы 58 и/или
5 электродвигатель привода инструмента 60 и тем самым прекращался процесс резания.
Для постоянного контроля процесса измерения и обработки полученная в зависимости от размеров рыбы, в частности от
0 толщины, величина подается от центральной вычислительной машины 1 через запоминающий и связующий элемент схемы 17 в последовательной форме в регистр 61 схемы 27, которая выполнена в виде схемы йн5 дикации размеров рыбы и содержит декодирующий каскад 62, а также многоразрядную, включающую, например, семь сегментов, сегментную индикацию 47, Регистр 61 накапливает последовательные данные и
0 подает их одновременно параллельно постоянно на подключенные к нему декодирующие каскады 62, которые, в частности, вырабатывают четырехбитный цифровой сигнал семизначного кода А6, который
5 предназначен для управления семисегмен- тной индикацией 47.
Для оптимизации обработки рыбы управляющее устройство оснащено преселек- тивным позиционным блоком
0 переключателей 46 с многими преселектив- ными переключателями, с помощью которых могут задаваться определенная длина головы рыбы или определенные процессы разрезания, например боковое разрезание,
5 а также другие параметры обработки. Величины управляющего воздействия этих пре- селективных переключателей постоянно учитываются во время обработки рыбы, т.е. это означает, что изменение положения переключателя немедленно распознается и
считывается и тем самым учитывается для позиционирования обрабатывающих инструментов. Преселективный позиционный блок переключателей 46 установлен снаружи блока 12 управления, причем управление ими осуществляют непосредственно запоминающим и логическим связующим элементом схемы 19 и данные считывают благодаря тому, что каждому переключателю соответствует отдельный управляющий сигнал, в то время как сигналы считывания от каждого преселективного переключателя в виде четырехбитного сигнального образца, связанные через диоды (не показаны) подаются на четыре общих считывающих входа запоминающего и связующего элемента схемы 19,
Схемы подключения в конструктивных блоках 2 и 3 (фиг. 1-3} соединены таким образом, чтобы был обеспечен бесперебойный процесс эксплуатации общего управляющего устройства благодаря четырем блокам питания через сетевые разъемы 63 различного вида. Через соединительный блок VE 1 блок вычислительной машины 1, конструктивный блок 2, а также блок 12 управления и запоминающее устройство 13 питаются напряжением 5 В. При этом соединительный блок VE 1 сетевого разъема 63 подключен к предусмотренному в периферийной схеме 3 помехоподавляющему фильтру 64. Внешний контур периферийной схемы 3, т.е. отделенные с помощью оптоэ- лёктронного элемента 28 связи от внутренних электронных управляющих контуров входные и выходные схемы (контуры управления машиной), должны питаться напряжением 5 В через соединительный блок VE 2 сетевого разъема 63, а также напряжением 23 В через соединительный блок VE 3 сетевого разъема 63. В периферийной схеме 3 предусмотрена введенная в нее схема защиты трансформатора напряжения и устройство защиты от короткого замыкания 65 для подвода напряжения к соединительному блоку VE 2. При помощи соединительного блока VE 3 запиты ваются также датчики сигналов 31, 32 и 33. Для питания двухтактного выходного каскада 51 схемы генерации управляющих импульсов шагового электродвигателя 24 предусмотрен соединительный блок VE 4, подводящий напряжение 24 В.
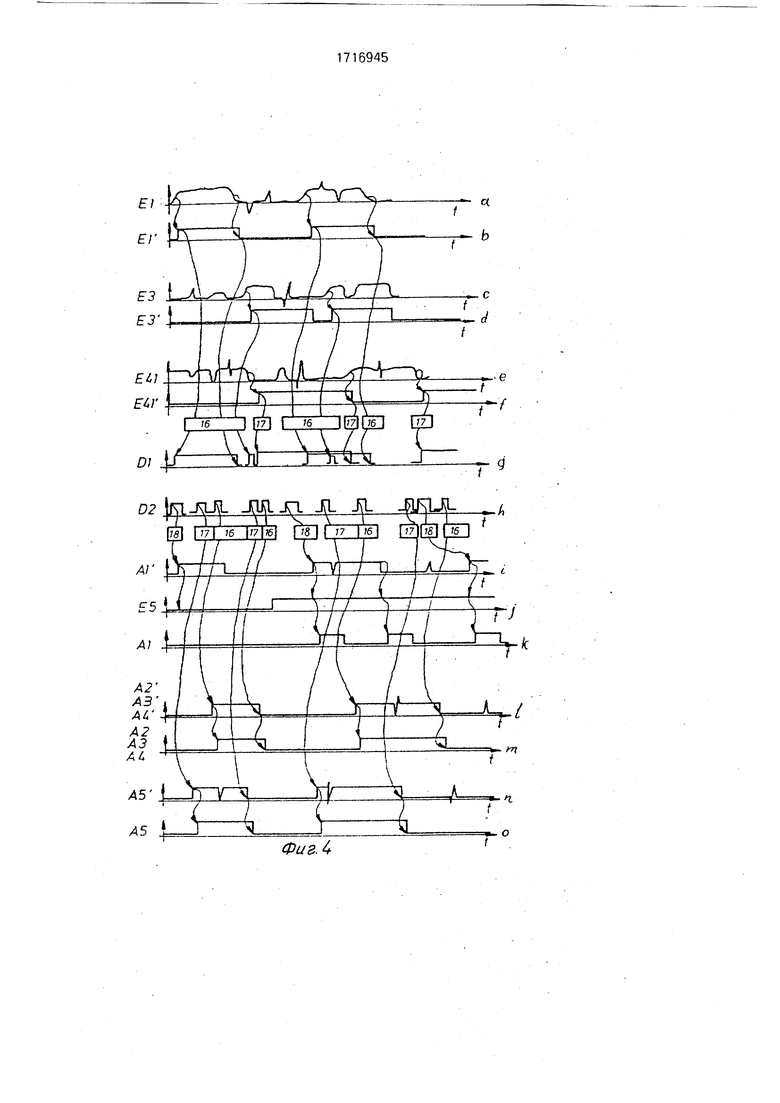
С помощью переключательного контура схемы 20 искаженный сигнал контроля нулевого положения Е1 шагового электродвигателя ( фиг. 4а ) преобразуется в стабилизированный и защищенный от помех выходной сигнал EI (фиг. 4ь). Соответствующие соотношения сигналов или порядок прохождения сигналов заложены в
схему 21 ввода управляющих сигналов Е2. Искаженный импульсный сигнал ЕЗ транспортировки рыбы (фиг. 4с) приобретает благодаря воздействию оптического элемента
30 форму ЕЗ (фиг. 4d). Искаженный сигнал результатов измерения рыбы Е41х(фиг. 4е) трансформируется с помощью участка схемы 23 в стабилизированный и переформированный сигнал Е41 (фиг. 4f). Вследствие
0 осуществления управления с помощью логического связующего элемента схемы 16 для сигнала Е1 а также ЕЗ , а также вследствие осуществления управления с помощью логического связующего элемента
5 схемы 17 для сигнала входе конструктивного блока 2 возникает параллельный сигнал шины данных D1 (фиг. 4). Этот сигнал вследствие вычислительных и логических операций вычислительной машины 1 управ0 ляющего устройства приводит к образованию параллельного сигнала шины данных D2 (фиг. 4h) на выходе конструктивного блока 2. Дальнейшая последовательность команд управления в блоке управления 12
5 способствует тому, что логический связующий элемент схемы 18 подает сигнал управления А1 шагового электродвигателя (фиг. 4}), который с помощью участка схемы генерации управляющих импульсов 24 шагового
0 электродвигателя освобождается от помех, переформируется, так что получают исполнительные импульсы А1 шагового электродвигателя (фиг. 4k) для управления блоками мощности шагового электродвигателя. По5 дача импульсных исполнительных сигналов А1 шагового электродвигателя не проходит . до тех пор, пока управляющий сигнал Е5 защитной сетки машины (фиг. 4j) не достигнет нулевого уровня. Со связующего эле0 мента схемы 16 считывается сигнал управления А2 , АЗ или А4 (фиг, 4t), который соответственно после подавления помех, стабилизации и переформирования с помощью соответствующей переключатель5 ной схемы, включенной в схему 25, приводит к появлению сигнала снятия возбуждения А2, сигнала направления вращения A3 или сигнала возврата в исходное положение А4 шагового электродвигателя
0 (фиг. 4т). С логического связующего элемента схемы 17 для управления приводным двигателем инструментов 66 и/или электродвигателя механизма транспортировки рыбы 58 считывается сигнал управле5 ния А5 режимом работы машины (фиг. 4п), который освобождается от помех и переформируется в соответствующей части схемы управления 26 механизмом транспортировки рыбы и приводом инструментов, так что схема 26 подает сигналы А5
(фиг. 4о). На диаграмме сигналов изменение сигналов вследствие повышения чли спада фронта импульса или при определенном уровне сигнала представлено при помощи проходящих между диаграммами базовых линий, которые в соответствии с состоянием результирующего сигнала соответствуют управляющему сигналу, причем управление с помощью логических элементов схемы 16, 17 и 18 схематически представлено соответ- ствующими клеточками.
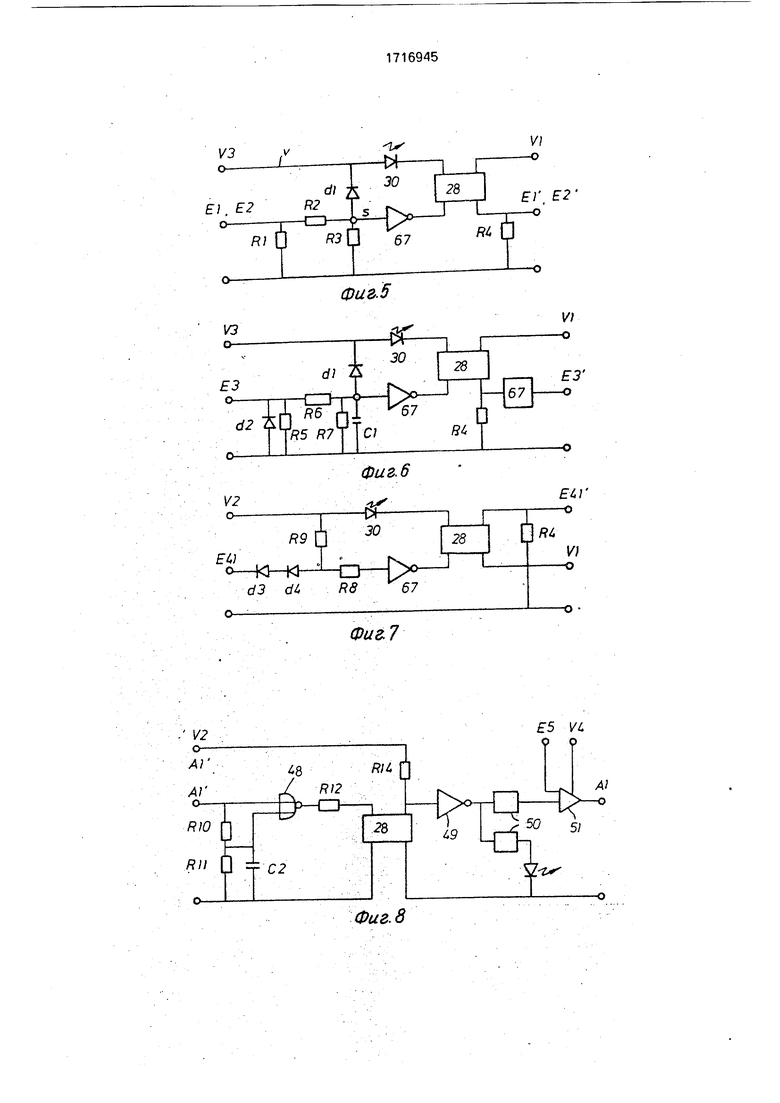
Схема ввода управляющих параметров (фиг. 5), т.е. в данном случае как схема ввода нулевого положения 20 шагового электродвигателя или как схема ввода 21 сигналов положения рыбы и/или сигналов режима работы машины, содержит на входе П-схему омических сопротивлений R1, R2 и R3, на которую подан входной сигнал Е1 и Е2, между сигнальной линией S и линией питающе- го напряжения U включен дифференцирующий диод d 1. Управляющий сигнал через КМОП-полупроводнико- вый элемент схемы, а именно через инвертирующий усилитель 67. подается на оптоэлектронный элемент связи 28, приводимый в действие напряжением U1 5 В, На выход схемы через сопротивление R4 поступает сигнал Е1 или Е2/. Для визуальной индикации предусмотрен индикаторный элемент 30 в виде светодиода (LED). Схема рассчитана таким образом, что существенным для параметров управления рыбой является уровень переключения U 10 В при токе I 6 мА.
Схема 22 генерации входных импульсов (фиг. 6) содержит схему омических сопротивлений R5. R6 и R7 вместе с включенным параллельно с сопротивлением R5 диодом d2 и с включенным параллельное сопротив- лением R7 конденсатором С1. В остальном построение схемы соответствует схеме по фиг. 5, причем на выходе схемы предусмотрена схема 43 формирования импульсов. Параметры схемы 22 выбраны таким обра- зом, что существенный для пути транспортировки рыбы импульс имеет уровень напряжения U 10 В и соответствует току I 3 мА. Импульсы помех или отдельные импульсы малой длительности, которые не соответствуют пути транспортировки рыбы, подавляются. Схема 43 формирования импульсов при появлении фронта входного сигнала выдает выходной сигнал определенной длительности. Если поступает еще выходной сигнал и появляется следующий фронт входного сигнала, то этот сигнал не оказывает действия на схему.
Схема ввода данных измерения рыбы (фиг. 7) содержит канал управления, например, Е41, соответствующий нескольким каналам образца бита результатов измерения рыбы Е4, на входе сопряжена пара диодов d3, d4 с включенным последовательно сопротивлением R8, причем сигнал подан на инвертирующий усилитель 67. Выходная часть схемы с индикаторным элементом 30, оптоэлектронным элементом связи 28 и сопротивлением R4 соответствует построению схемы по фиг. 5. Индикаторный элемент 30 через омическое сопротивление R9 соединен с диодом d4. причем к сопротивлению R9 и индикаторному элементу 30 подключено напряжение U2 5 В. Схема рассчитана таким образом, что существенный для измерения параметров рыбы битовой сигнал имеет напряжение U 4 В, в то время как несущественные для измерения рыбы сигналы имеют напряжение U 0,5 В и ток I 8 мА,
Схема генерации управляющих импульсов 24 шагового электродвигателя (фиг. 7) содержит в области входа комбинацию из двух сопротивлений R10 и R11, а также конденсатор С2, которые соединены таким образом, что импульсный сигнал А11 запускает инвертирующий вентиль Исключающее ИЛИ 48. Выход вентиля через омическое сопротивление R12 соединен с оптоэлектронным элементом связи 28. Для переформирования развязанного сигнала предусмотрена схема на триггерах Шмитта, т.е. инвертирующий задающий генератор 49, выход которого соединен с временным каскадом 50. После временного каскада 50 включен двухтактный выходной каскад 51, который подает исполнительный импульсный сигнал А1 на сопряженный шаговый электродвигатель. Для индикации последовательности импульсов предусмотрен индикаторный элемент 30. Схема обеспечивает то, что при каждой происходящей на входе смене сигнала на выходе выдается исполнительный ммпульс. Этот импульс имеет необ- ходимую для запуска шагового электродвигателя длительность. Каждый исполнительный импульс имеет уровень 24 В. Выход двухтактного выходного каскада соединен проводником с низким сопротивлением с сопряженным блоком мощности шагового электродвигателя. При нагруже- нии двухтактного выходного каскада 51 соответствующим управляющим сигналом Е5 уровень сигнала меняется с 24 до О В, так что переключательные каскады двухтактного выходного каскада 51 блокируются, следовательно, на блоки мощности шагового электродвигателя не подаются исполнительные импульсы. Через омическое сопротивление R14 выход оптоэлектронного
элемента связи 28 и вход задающего генератора 49 запитываются напряжением U2 5B.
Схема управления 25 шаговым электродвигателем (фиг. 9), которая пригодна для выработки сигналов снятия возбуждения А2 шагового электродвигателя, сигнала направления вращения A3 шагового электродвигателя или сигнала возврата в исходное положение А4 шагового электродвигателя, содержит на стороне входа управляемый сигналом А2 , АЗ или А4 оптоэлектронный элемент связи 28, выход которого соединен со схемой формирования сигнала 56, которая со стороны выхода подключена к входу двухтактного выходного каскада 57. Вход двухтактного выходного каскада соединен с содержащим омическое сопротивление R16 и R17 делителем напряжения, который расположен между нулевым потенциалом и ли- нией питающего напряжения U2 5 В. Оптоэлектронный элемент связи запитыва- ется через сопротивление R15 также напря- жением U2. На выходе схемы 56 предусмотрен подключенный через сопро- тивление R18 к нулевому потенциалу индикаторный элемент 30. Схема рассчитана таким образом, что двухтактным выходным каскадом 57 обрабатывается только сигнал с уровнем U 8 В, и защищенный от помех, т.е. низкоомный сигнал подается на сопряженный исполнительный орган шагового электродвигателя.
Пригодная для управления механизмом транспортировки рыбы или электродвигате- лем привода инструментов 66 схема 26 (фиг. 10) имеет для подачи сигнала А5 на электродвигатель механизма транспортировки рыбы или электродвигатель привода инструментов выходной каскад, который че- рез омическое сопротивление R19 управляет транзистором Дарлингтона как выходной каскад 59, причем управляющий сигнал А5 подан на вход схемы через гальванически развязывающий оптоэлектронный элемент связи 28. Визуальная индикация сигнала осуществляется с помощью светодиода (LED), служащего индикаторным элементом 30, который через сопротивление R20 вклю- чем между выходной линией и нулевым по- тенциалом. Выходной сигнал А5 имеет уровень напряжения 24 В и допускает протекание тока, с помощью которого можно управлять исполнительным элементом, в частности реле. Транзистор Дарлингтона вы- ходного каскада 59 подключен к напряжению U3 24 В.
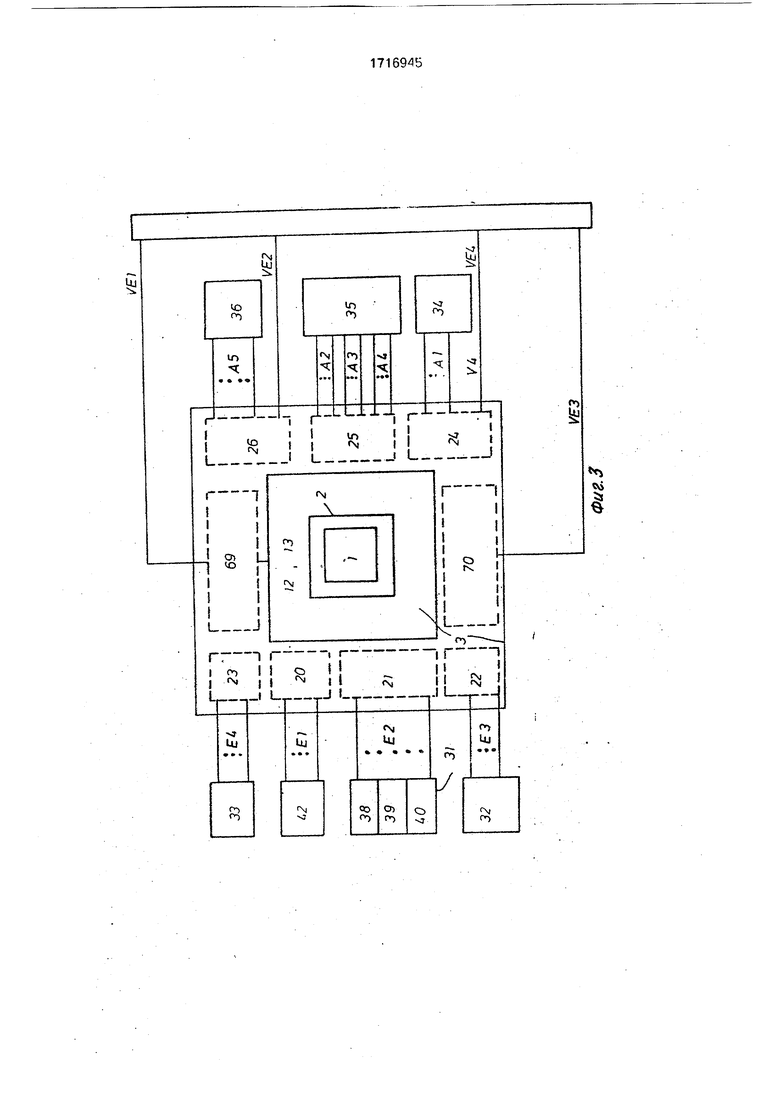
Электронное управляющее устройство (фиг, 11), образующего компактный конструктивный блок, содержит три монтажные
панели или платы 68. 69 и 70, которые образуют конструкцию типа штабеля, их поверхности параллельны друг другу. На первой плате 69 расположен конструктивный блок 2 устройства, на второй, или средней, плате 68 - первый конструктивный блок 1 устройства, и на третьей плате 70 - конструктивный блок 3 устройства. Каждый конструктивный блок 1, 2 или 3 отделен от соседнего (соседних) конструктивного блока (конструктивных блоков) с помощью рас- положенной между ними платы. При помощи механических соединительных элементов 71 может быть создан в целом очень компактный, малогабаритный и стабильный блок, причем пространство между платами практически занято конструктивным блоком и определено его размерами.
Электрические соединения между конструктивными блоками 1 и 2 или 2 и 3 осуществляются с помощью плоских кабелей 72 и 73, которые с помощью штепсельного соединения 74 подключены к конструктивным блокам с возможностью разъема.
Таким образом, создан легко монтируемый, в частности собираемый в виде модульной конструкции, цельный функциональный блок, который может быть установлен внутри управляемой рыбообрабатывающей машины. Вследствие специфических, присущих отдельным конструктивным блокам электрических функций и описанного пространственного расположения или компоновки отдельных конструктивных блоков предотвращены нежелательные взаимодействия внутри конструктивного блока. Расположение плат в виде конструкции типа штабеля обеспечивает разделение и экранирование от или против электрических полей.
Формула изобретения
1. Электронное управляющее устройство с исполнительными элементами рыбообрабатывающей машины, содержащее запоминающие, логические и управляющие элементы для параметров измерения рыбы, отличающееся тем, что, с целью повышения экономии обработки рыбы, оно содержит соединенные между собой через блоки усиления сигналов и согласования центральную вычислительную машину и периферийную схему вычислительной машины, а также входной и выходной блоки, при этом запоминающие логические и управляющие элементы, периферийная схема и блоки усиления сигналов и согласования образуют блок управления, причем последний соединен с входным и выходным блоками.
2.Устройство поп. 1, о т л и ч а ю щ е е- с я тем, что входной и выходной блоки содержат оптические элементы, выполненные преимущественно в виде светодиодов.
3.Устройство по пп. 1 и 2, о т л и ч а юч щ е е с я тем, что выходной блок содержит схему индикации размеров рыбы с регистром, декодирующим каскадом и многопозиционной сегментной индикацией размеров рыб.
4.Устройство по пп. 1-3, о т л и ч а ю - щ е е с я тем, что выходной и входной блоки содержат элементы для гальванической развязки, предпочтительно оптоэлектронные элементы связи.
5.Устройство по пп. 1-4, о т л и ч а ю - щ е е с я тем, что входной блок содержит схему предварительной обработки сигналов и формирования импульсов.
6.Устройство по пп. 1-5, отличающееся тем, что оно содержит входную инвертирующую логическую схему и последовательно соединенные инвертирующий
задающий генератор, временной каскад, двухтактный выходной каскад.
7.Устройство по пп. 1-6, отличающееся тем, что выходной блок содержит
схему формирования сигналов и двухтактный выходной каскад с термическими средствами контроля, а также схему управления механизмом транспортировки рыбы и приводом инструмента с выходным каскадом
мощности.
8.Устройство по п. 7, о т л и ч а ю щ е е- с я тем, что выходной каскад мощности снабжен схемой ограничения тока.

Изобретение относится к электронному управляющему устройству с исполнительными элементами рыбообрабатывающей машины, содержащему запоминающие, логические и управляющие элементы для параметров измерения рыбы. Цель изобретения - повышение экономии обработки рыбы. Устройство содержит соединенные между собой через блоки усиления сигналов и согласования центральную вычислительную машину и периферийную вычислительную машину, а также входной и выходной блоки, при этом запоминающие логические и управляющие элементы, периферийная ВМ и блоки усиления сигналов и согласования образуют блок управления, соединенный с входным и выходным блоками. 7 з.п.ф-лы, 11 йл.
Е) Е2 ЕЗ Ее,
VE2
Фиг.1
1 vt.3
I.
El.
A5
Фиг. 4- «
V2 о-
R9
Eti
d3 c/4 R8
Фиг. 5
ЕЗ
фиг. 6
и
Е4Г -о
Rt
V) -о
67
Фиг.7
Фиг. 8
jr-/sr
о
г
ix
о
LT) Ч
О
vO
5
к,
$ -СИ
HD-W-
У
Р1
in
л
S
-
2 Г ft: И
г-О
1Л
$
Ј N
,4
о
in Ч
о
V
о:
-СЗ-01$
R
| Устройство для управления рабочими органами рыборазделочной машины | 1980 |
|
SU923494A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
