26
32
23
2f
Iti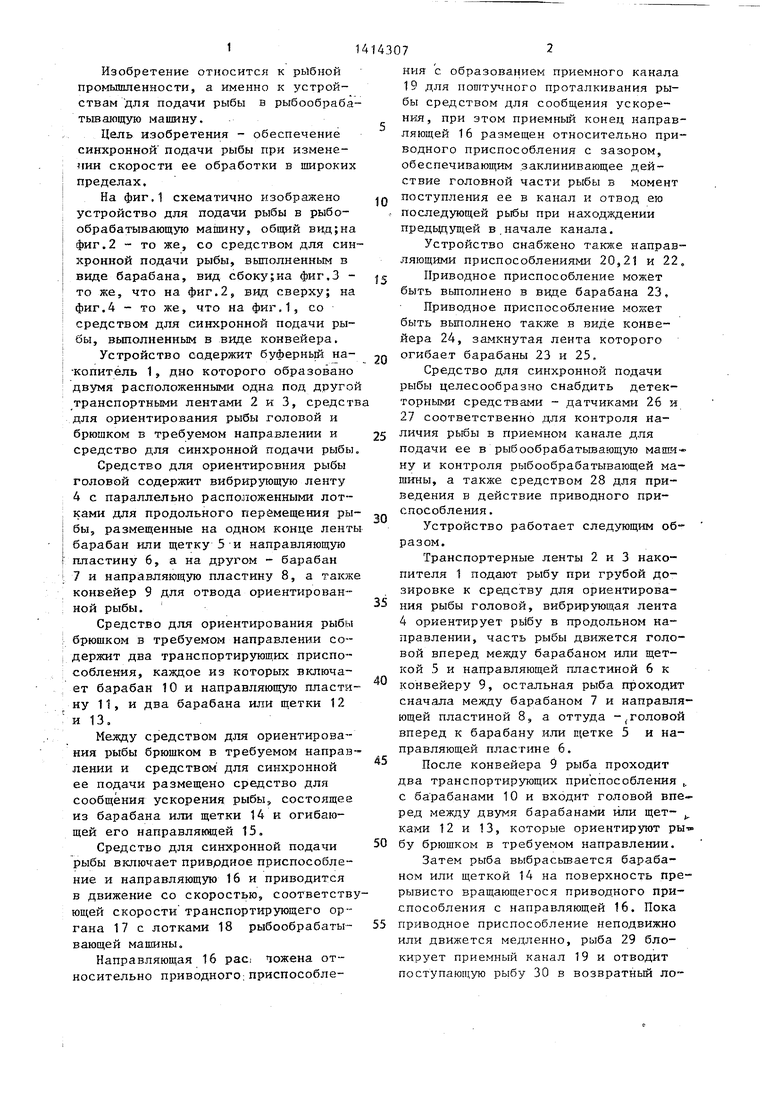
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РЫБЫ В РЫБООБРАБАТЫВАЮЩИЕ МАШИНЫ | 2017 |
|
RU2649340C1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОГО РАЗДЕЛЕНИЯ И ОРИЕНТИРОВАНИЯ РЫБЫ | 2016 |
|
RU2645977C2 |
| Способ ориентированной подачи к режущим инструментам рыбы и устройство для его осуществления | 1989 |
|
SU1775088A1 |
| Устройство для разделки рыбы | 1990 |
|
SU1750584A1 |
| Устройство для загрузки рыбы | 1977 |
|
SU626749A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ РЫБЫ ГОЛОВОЙ В ОДНУ СТОРОНУ | 2016 |
|
RU2645974C2 |
| ТРАНСПОРТИРОВОЧНАЯ УСТАНОВКА, СПОСОБ ТРАНСПОРТИРОВКИ РЫБЫ ПОПЕРЕЧНО ЕЕ ПРОДОЛЬНОЙ ПРОТЯЖЕННОСТИ В НАПРАВЛЕНИИ ТРАНСПОРТИРОВАНИЯ И РЫБООБРАБАТЫВАЮЩАЯ МАШИНА, СОДЕРЖАЩАЯ ТАКУЮ ТРАНСПОРТИРОВОЧНУЮ УСТАНОВКУ | 2017 |
|
RU2717486C1 |
| Устройство для ориентированной подачи рыбы к режущим инструментам | 1990 |
|
SU1750581A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ РЫБЫ ГОЛОВОЙ В ОДНОМ НАПРАВЛЕНИИ | 2008 |
|
RU2363162C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РЫБЫ В РЫБООБРАБАТЫВАЮЩИЕ МАШИНЫ | 2016 |
|
RU2645979C2 |
Изобретение относится к рыбной промьшшенности. Цель изобретения - обеспечение синхронной подачи рыбы при изменении скорости ее обработки в широких пределах. Рыба подается головой вперед и брюшком в определенном направлении с помощью средства для ориентирования и синхронной подачи (1-13) к средству для сообщения 28 Гб 5 30 || 20 ускорения рыбе (14-15) и от него со скоростью около 3-8 м/с в средство для синхронной подачи рыбы,.содержащее, например, барабан 23 и внешнюю направляющую 16. Рыба 29 захватывается в зазоре между барабаном 23 и направляющей 16 при условии, ч то в зазоре ничего нет. Всякий раз,когда натяг транспортирующего органа 17 рыбообрабатывающей машины проходит мимо барабана 23, очередная рыба 32 подается в него с большой скоростью, в то время как рыба 29, захваченная в указанном зазоре, немедленно продвигается на место, освобожденное предшествующей рыбой 32.Пока рыба 29 остается в указанном зазоре,она отводит последующие рыбы 30 в отводное направляющее приспособление 20. Таким образом, самими рыбами обеспечивается равномерньп поток отдельных рыб на ленту транспортирующего органа 17. 3 з.п. ф-лы, 4 ил. СО с 30 15 4 00
127
22
18
7ч XV-у
:
сн
7-/3
фиг. 2
Изобретение относится к рьШной промышленности, а именно к устройствам для подачи рыбы в рыбообраба- тьшшощую машину.
Цель изобретения - обеспечение синхронной подачи рыбы при изменении скорости ее обработки в широких пределах.
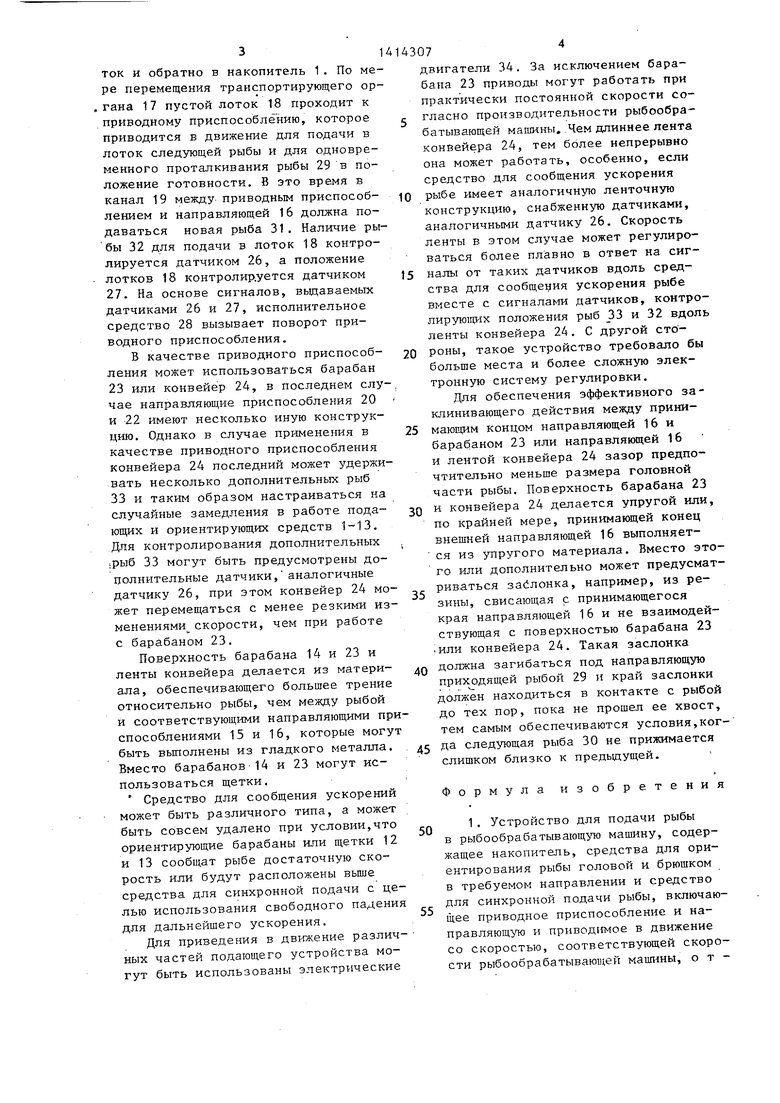
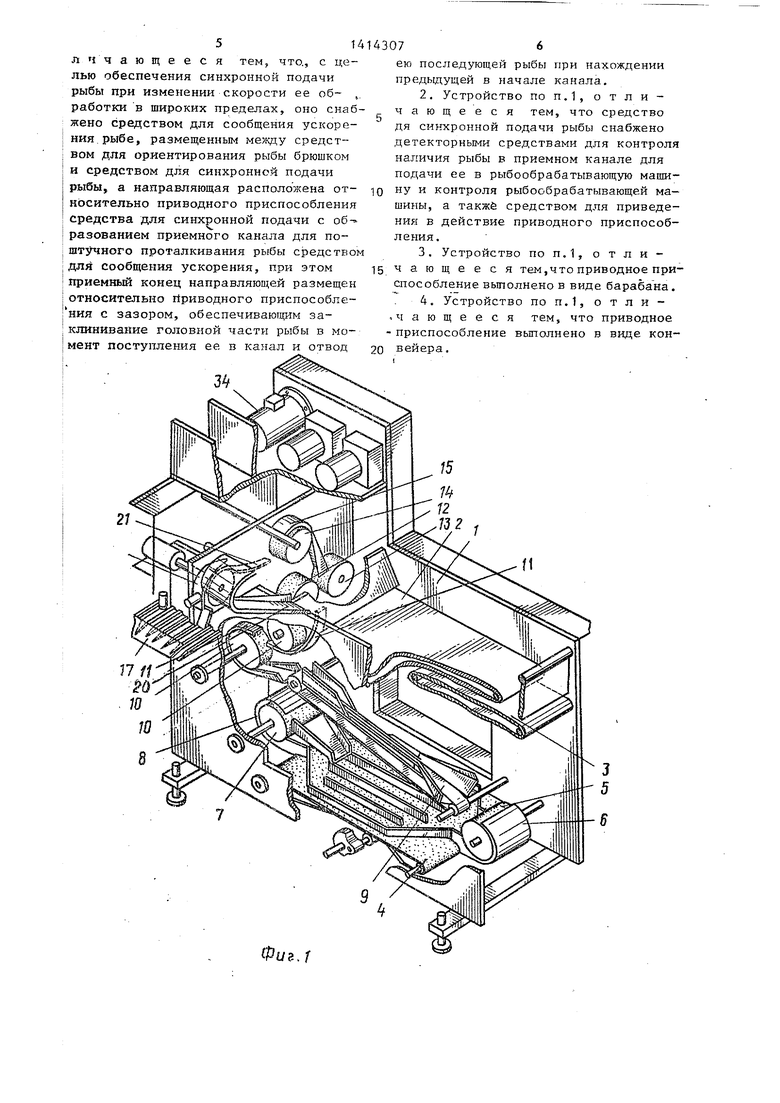
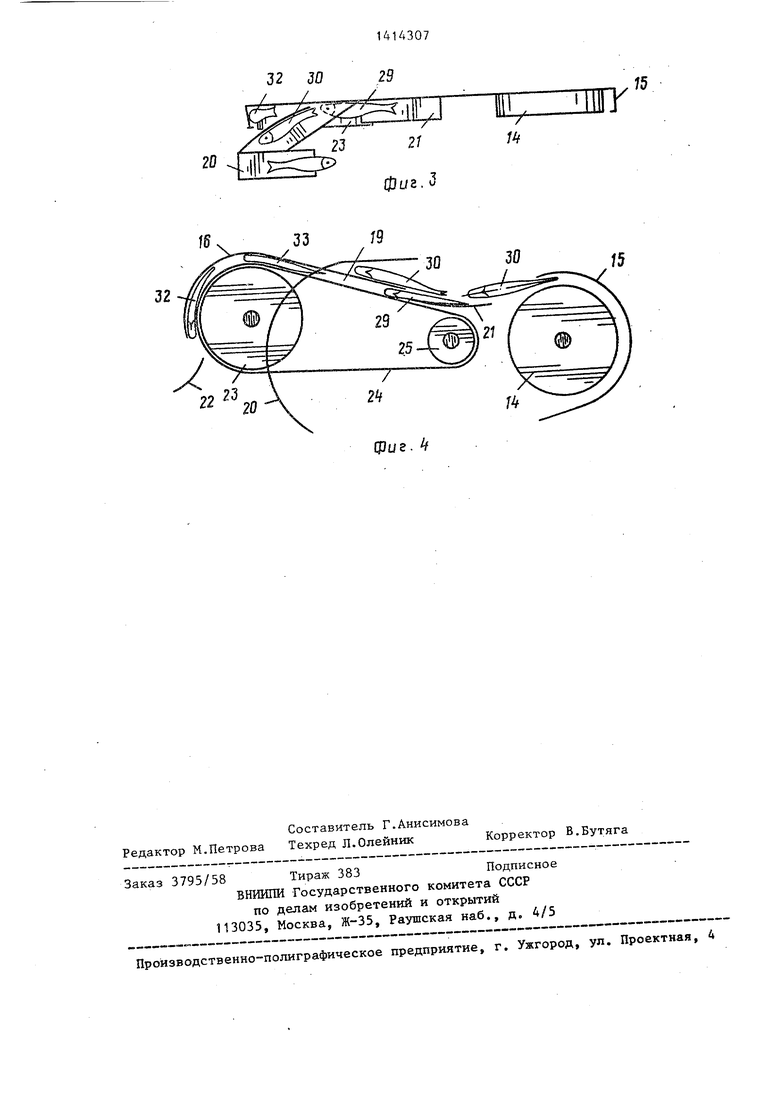
На фиг,1 схематично изображено устройство для подачи рыбы в рыбообрабатывающую машину, общий ви,ц;на фиг.2 - то же, со средством для синхронной подачи рыбы, вьшолненным в виде барабана, вид сбоку;на фиг.З - то же, что на фиг.2, вид сверху; на фиг.4 - то же, что на фиг.1, со средством для синхронной подачи рыбы, выполненным в виде конвейера. Устройство содержит буферньй на- копитёль 1, дно которого образовано двумя расположенными одна под другой транспортными лентами 2 и 3, средства для ориентирования рыбы головой и брюшком в требуемом направлении и средство для синхронной подачи рыбы.
Средство для ориентировния рыбы головой содержит вибрирующую ленту 4 с параллельно расположенными лот- ками для продольного перемещения ры бы, размещенные на одном конце ленты барабан или щетку 5-и направляющую пластину 6, а на другом - барабан 7 и направляющую пластину 8, а также конвейер 9 для отвода ориентированной рыбы.
Средство для ориентирования рыбы брюшком в требуемом направлении со- держит два транспортир5гющих приспособления, каждое из которых включает барабан 10 и направляющую пластину It, и два барабана или щетки 12 и 13,
Между средством для ориентирования рыбы брюшком в требуемом направ лении и средством для синхронной ее подачи размещено средство для сообщения ускорения рыбы, состоящее из барабана или щетки 14 и огибающей его направляющей 15.
Средство для синхронной подачи рыбы включает приврдное приспособление и направляющую 16 и приводится в движение со скоростью, соответствующей скорости транспортирующего органа 17с лотками 18 рыбообрабатывающей машины.
Направляющая 16 paci ггожена относительно приводного;приспособления с образованием приемного канала 19 для попгтуч-ного проталкивания рыбы средством для сообщения ускорения, при этом приемный конец направляющей 16 размещен относительно приводного приспособления с зазором, обеспечивающим заклинивающее действие головной части рыбы в момент
Q поступления ее в канал и отвод ею о последующей рыбы при находждении предьщущей в.начале канала.
Устройство снабжено также направляющими приспособлениями 20,21 и 22.
2 Приводное приспособление может быть выполнено в виде барабана 23, Приводное приспособление может быть вьтолнено также в виде конвейера 24, замкнутая лента которого
Q огибает барабаны 23 и 25.
Средство для синхронной подачи рыбы целесообразно снабдить детекторными средствами - датчиками 26 и 27 соответственно для контроля на5 личия рыбы в приемном канале для
подачи ее в рыбообрабатывающую машину и контрох я рыбообрабатывающей ма- щины, а также средством 28 для приведения в действие приводного приспособления .
Устройство работает следующим об разом.
Транспортерные ленты 2 и 3 накопителя 1 подают рыбу при грубой дозировке к сре,цству для ориентирова5 ния рыбы головой, вибрирующая лента 4 ориентирует рУбу в продольном направлении, часть рыбы движется головой вперед между барабаном или щеткой 5 к направляющей пластиной 6 к
конвейеру 9, остальная рыба проходит сначала между барабаном 7 и направляющей пластиной 8, а оттуда - головой вперед к барабану и,пи плетке 5 и направляющей пласт1-ше 6.
После конвейера 9 рыба проходит два транспортирующих приспособления с ба рабанами 10 и входит головой вперед между двумя барабанами или щет- ками 12 и 13, которые ориентируют ры-
0 бу брюшком в требуемом направлении. Затем рыба вь брасывается барабаном или щеткой 14 на поверхность прерывисто вращающегося приводного приспособления с направляющей 16. Пока
5 приводное приспособление неподвижно или движется медленно, рыба 29 блокирует приемный канал 19 и отводит поступающую рыбу 30 в возвратный ло
0
3
ток и обратно в накопитель 1. По мере перемещения транспортирующего ор- , гана 17 пустой лоток 18 проходит к приводному приспособлению, которое приводится в движение для подачи в лоток следующей рыбы и для одновременного проталкивания рыбы 29 в положение готовности, В это время в канал 19 между, приводным приспособлением и направляющей 16 должна подаваться новая рыба 31. Наличие рыбы 32 для подачи в лоток 18 контролируется датчиком 26, а положение лотков 18 контролир.уется датчиком 27. На основе сигналов, вьщаваемых датчиками 26 и 27, исполнительное средство 28 вызывает поворот приводного приспособления,
В качестве приводного приспособления может использоваться барабан 23 или конвейер 24, в последнем слу чае направляющие приспособления 20 и 22 имеют несколько иную конструкцию. Однако в случае применения в качестве приводного приспособления конвейера 24 последний может удерживать несколько дополнительных рыб 33 и таким образом настраиваться на случайные замедления в работе подающих и ориентирующих средств 1-13. Для контролирования дополнительных ;рыб 33 могут быть предусмотрены дополнительные датчики, аналогичные датчику 26, при этом конвейер 24 может перемещаться с менее резкими изменениями скорости, чем при работе с барабаном 23.
Поверхность барабана 14 и 23 и ленты конвейера делается из материала, обеспечивающего большее трение относительно рыбы, чем между рыбой и соответствующими направляющими приспособлениями 15 и 16, которые могут быть вьшолнены из гладкого металла. Вместо барабанов 14 и 23 могут использоваться щетки.
Средство для сообщения ускорений может быть различного типа, а может быть совсем удалено при условии,что ориентирующие барабаны или щетки 12 и 13 сообщат рыбе достаточную скорость или будут расположены вьше средства для синхронной подачи с целью использования свободного падения для дальнейшего ускорения.
Для приведения в движение различ- ных частей подающего устройства могут быть использованы электрические
07
двигатели 34. За исключением барабана 23 приводы могут работать при практически постоянной скорости согласно производительности рыбообрабатывающей машины, .Чем длиннее лента конвейера 24, тем более непрерывно она может работать, особенно, если средство для сообщения ускорения
рыбе имеет аналогичную ленточную конструкцию, снабженную датчиками, аналогичными датчику 26. Скорость ленты в этом случае может регулироваться более плавно в ответ на сигналы от таких датчиков вдоль средства для сообщения ускорения рыбе вместе с сигналами датчиков, контролирующих положения рыб 33 и 32 вдоль ленты конвейера 24. С другой сто роны, такое устройство требовало бы больше места и более сложную электронную систему регулировки.
Для обеспечения эффективного заклинивающего действия между принимающим концом направляющей 16 и барабаном 23 или направляющей 16 и лентой конвейера 24 зазор предпочтительно меньше размера головной части рыбы. Поверхность барабана 23
и конвейера 24 делается упругой или, по крайней мере, принимающей конец внешней направляющей 16 выполняется из упругого материала. Вместо этого или дополнительно может предусматриваться за 1лонка, например, из резины, свисающая с принимающегося края направляющей 16 и не взаимодействующая с поверхностью барабана 23 .или конвейера 24. Такая заслонка
должна загибаться под направляющую приходящей рыбой 29 и край заслонки должен находиться в контакте с рыбой до тех пор, пока не прошел ее хвост, тем самым обеспечиваются условия,когда следующая рыба 30 не прижимается слишком близко к предыдущей.
Формула изобретения
Фи..Г
20
f5
фиг.
| Устройство для загрузки рыбы в рыбообра-бАТыВАющиЕ МАшиНы | 1979 |
|
SU835388A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
