Изобретение относится к области средств наблюдения или слежения за полетом космических аппаратов (КА) и может быть использовано в командно-измерительной системе (КИС) спутниковой связи для измерения наклонной дальности - расстояния между наземным комплексом управления космического аппарата (НКУ КА) и КА.
Известен способ измерения дальности на основе применения псевдослучайных последовательностей. Способ детально описан в "Satellite Earth Stations and Systems (SES); Technical analysis of Spread Spectrum Solutions for Telemetry Command and Ranging (TCR) of Geostationary Communications Satellites. ETSI TR 101 956 V 1.1.1. 2001-09". В данном способе в НКУ КА производят наложение псевдослучайной последовательности (ПСП) в форме кода, обеспечивающего уникальность элементов, на сигнал несущей частоты и передают на космический аппарат. Полученный приемо-передающим устройством бортовой аппаратуры КИС КА (БА КИС КА) сигнал ретранслируют обратно на НКУ КА, где искомое значение дальности определяют по сдвигу структуры ПСП принятого сигнала относительно исходной структуры ПСП.
Недостатком данного способа-аналога является возможность применения только к цифровым видам модуляции и необходимость формирования широкого спектра передаваемого сигнала, что говорит о сложности реализации.
Известен также способ измерения дальности с использованием набора тонов. Способ детально описан в "Ranging standard Volume 1: Direct Ground to Spacecraft Ranging. ESA PSS-04-104 Volume 1 Issue 2. 1991-03" В данном способе в НКУ КА генерируют последовательно набор тонов (на немодулированной поднесущей), модулируют на сигнал с аналоговой модуляцией и отправляют на БА КИС КА. Сигнал, принятый БА КИС КА, демодулируют для выделения поднесущих, которыми формируют ответный сигнал приемо-передающего устройства (ППУ) БА КИС КА и ретранслируют на Землю. По ретранслированному на Землю сигналу, принятому НКУ КА, получают искомое значение дальности с помощью пересчета времени задержки распространения сигнала на главном тоне. При этом минорные тоны используют для устранения неоднозначности измерения.
Недостатком данного способа-аналога является возможность применения только к аналоговой модуляции без подавления несущей.
Наиболее близким к заявляемому техническому решению по технической сущности и достигаемому техническому результату является комбинированный способ измерения дальности. Способ детально описан в "Satellite Earth Stations and Systems (SES); Technical analysis of Spread Spectrum Solutions for Telemetry Command and Ranging (TCR) of Geostationary Communications Satellites. ETSI TR 101 956 V 1.1.1. 2001-09". Описанный способ принят за прототип. В данном способе генерируют набор тонов и отправляют на ППУ БА КИС КА в виде цифрового сигнала. Сигнал, принятый ППУ БА КИС КА демодулируют для выделения поднесущих частот (fподн), формируют сигнал с аналоговой модуляцией и ретранслируют на Землю. По ретранслированному на Землю сигналу, принятому НКУ КА, получают искомое значение дальности с помощью определения сдвига фазы псевдослучайной последовательности, модулированной на fподн. При этом с помощью главного тона обеспечивается точность измерения.
Недостатком данного способа-прототипа является неточность, вызванная нелинейным набегом фаз для минорных тонов, эффекта Доплера, а также искажения тонов за счет нелинейных характеристик ППУ БА КИС КА.
В основу настоящего изобретения положена задача разработки комбинированного измерения дальности до КА применительно к разным скоростям передачи информации для сигналов как с аналоговой, так и с цифровой модуляцией.
Данная задача решается за счет того, что в способе измерения дальности до КА генерируют синусоидальный сигнал на частотах f2 и f1 (f1 обеспечивает решение неоднозначности, f2 обеспечивает точность измерений) и ПСП (модулирует частоту f1), причем частоты f1 и f2 выбираются исходя из следующих условий:
1) f2>>f1,
2) f1 и f2 не должны совпадать с частотами телеметрии и телекоманд (fTM и fТК).
При этом ПСП реализуют со следующими характеристиками: длина ПСП выбирается из априорного расстояния до КА, форма заполнения битами 0 и 1 псевдослучайная, определяется исходя из наилучших автокорреляционных свойств. На основе сгенерированных сигналов модулируют аналоговый или цифровой сигнал в зависимости от условий (аналоговая или цифровая модуляция), переносят на несущую частоту и передают полученный сигнал посредствам передающего устройства НКУ КА на ППУ БА КИС КА. Сигнал, принятый ППУ БА КИС КА, демодулируют, формируют сигнал на ответной частоте и ретранслируют на землю. По ретранслированному на Землю сигналу, принятому НКУ КА, получают искомое значение дальности либо по сдвигу фазы принятого сигнала относительно исходного, что соответствует методу измерения с помощью ПСП, либо с помощью пересчета времени задержки распространения сигнала, что соответствует тоновому методу.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является возможность измерения дальности до КА при использовании как аналоговых, так и цифровых сигналов.
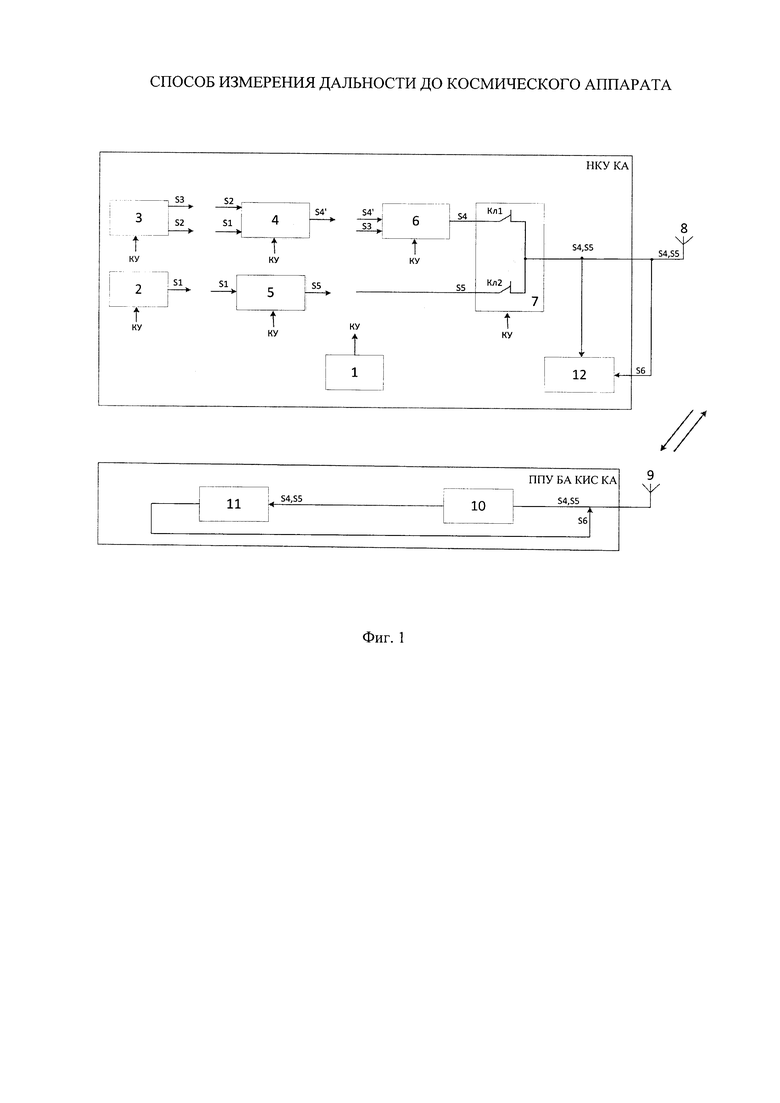
На фиг. 1 приведена функциональная схема системы, реализующая предлагаемый способ измерения дальности до космического аппарата.
Схема, реализующая способ измерения дальности до космического аппарата, представленная на фиг. 1, включает:
1) НКУ КА, в состав которого входят: генератор команд управления (генератор КУ) 1, генератор псевдослучайной последовательности (генератор ПСП) 2, генератор синусоидального сигнала 3, первый цифровой модулятор 4, второй цифровой модулятор 5, аналоговый модулятор 6, коммутатор 7, приемо-передающая антенна наземного комплекса управления космическим аппаратом (приемо-передающая антенна НКУ КА) 8, блок расчета дальности 12;
2) ППУ БА КИС КА, в состав которого входят: приемо-передающая антенна ППУ БА КИС КА 9, демодулятор 10, модулятор несущей частоты приемо-передающего устройства бортовой аппаратуры командно-измерительной системы космического аппарата (модулятор несущей частоты ППУ БА КИС КА) 11.
Сущность изобретения представлена следующим образом: генератор КУ 1 выдает КУ о формировании сигнала S1 генератором ПСП 2 и КУ о формировании сигнала S2 генератором синусоидального сигнала 3. После генерации сигналов S1 и S2 генератор КУ 1 выдает КУ о включении первого цифрового модулятора 4 или второго цифрового модулятора 5. В случае выдачи КУ о включении первого цифрового модулятора 4 на его входы одновременно поступают сигналы S1 и S2 и формируется цифровой сигнал S4'. В случае выдачи КУ о включении второго цифрового модулятора 5 на его вход поступает сигнал S1 и формируется цифровой сигнал S5. При измерении дальности тоновым методом на входы аналогового модулятора 6 поступают сформированный в первом цифровом модуляторе 4 сигнал S4' и сигнал S3, сгенерированный генератором синусоидального сигнала 2, после чего производится модуляция сигналов S3 и S4' на аналоговый сигнал несущей частоты S4 (fнес). В результате, образованный сигнал S4 или S5 поступает на коммутатор 7, состоящий из двух ключей (Кл 1 и Кл 2). В случае если необходимо передать сигнал S4 Кл 1 будет разомкнут, а Кл 2, соответственно замкнут. При необходимости передачи сигнала S5 Кл 2 будет разомкнут, а Кл 1, соответственно замкнут. В результате, переданный через коммутатор 7 сигнал S4 или S5 передается на ППУ БА КИС КА по трассе «Земля - КА» через передающую антенну НКУ КА 8. Сигналы S4 или S5, принятые приемо-передающей антенной КИС КА 9, поступают на демодулятор 10, где производится демодуляция принятого сигнала для выделения поднесущей частоты (fподн), с помощью которых формируется ответный сигнал предающего устройства S6, который модулируется на частоту fнес в модуляторе несущей частоты ППУ БА КИС КА 11 и ретранслируется на землю через приемо-передающую антенну КИС КА 9 по трассе «КА - Земля». Для случая измерения дальности с помощью тонового метода дальнейшая методика измерения сводится к следующему: по ретранслированному на землю сигналу S5, принятому приемо-передающей антенной НКУ КА, рассчитывается искомое значение дальности в блоке вычисления дальности 12 с помощью демодуляции данного сигнала и пересчета времени задержки его распространения относительно сигнала S4 на основном тоне. При этом минорный тон (тон с частотой f2) используется для устранения неоднозначности. Для случая измерения дальности с помощью ПСП дальнейшая методика измерения сводится к следующему: по ретранслированному на землю сигналу S5, принятому приемо-передающей антенной НКУ КА, рассчитывается искомое значение дальности в блоке вычисления дальности 12 с помощью демодуляции данного сигнала и определении структуры ПСП сигнала S5 относительно исходной структуры ПСП сигнала S5.
Таким образом, способ измерения дальности осуществляется путем формирования сигналов с аналоговой или цифровой модуляцией с помощью КУ, осуществления выбора передаваемого сигнала в зависимости от вида передаваемой информации, ретрансляции передачи данного сигнала на ППУ БА КИС КА и его ретрансляции на НКУ КА и дальнейшего измерения дальности до КА с помощью определения структуры ПСП ретранслированного сигнала относительного исходного или с помощью пересчета времени задержки ретранслированного сигнала.
Данный метод может быть применен в системах управления КА для высокоточного и оперативного измерения дальности, как с использованием аналоговых, так и цифровых сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИЗМЕРЕНИЯ ДАЛЬНОСТИ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2625171C2 |
| КОМАНДНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2692418C2 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ МЕЖДУ КОСМИЧЕСКИМ АППАРАТОМ И СТАНЦИЯМИ | 2008 |
|
RU2401437C2 |
| Способ управления космическим аппаратом | 2020 |
|
RU2735655C1 |
| СПОСОБ АДАПТИВНОГО КОНТРОЛЯ ДОСТОВЕРНОСТИ ПЕРЕДАЧИ КОМАНДНО-ПРОГРАММНОЙ ИНФОРМАЦИИ НА КОСМИЧЕСКИЙ АППАРАТ | 2015 |
|
RU2619156C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 1993 |
|
RU2040035C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ МЕЖДУ КОСМИЧЕСКИМ АППАРАТОМ И ИЗМЕРИТЕЛЬНЫМИ СТАНЦИЯМИ | 2006 |
|
RU2323860C1 |
| СПОСОБ ОПЕРАТИВНОЙ СИНХРОНИЗАЦИИ МЕР ВРЕМЕНИ И ЧАСТОТЫ, РАЗМЕЩЕННЫХ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1995 |
|
RU2109315C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ В ОБРАТНОМ КАНАЛЕ БОРТОВОЙ АППАРАТУРЫ КОМАНДНО-ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ МЕТОДОМ КВАДРАТУРНОЙ ФАЗОВОЙ МОДУЛЯЦИИ НЕСУЩЕЙ ЧАСТОТЫ, КОДИРУЕМОЙ М-ПОСЛЕДОВАТЕЛЬНОСТЬЮ С МАЛОРАЗРЯДНЫМИ КОДАМИ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2580055C1 |
Изобретение относится к способу измерения дальности до космического аппарата (КА). Для измерения дальности до КА генерируют сигнал, модулируют на его основе цифровой или аналоговый сигнал, переносят на несущую частоту и передают его с наземного комплекса управления КА, принимают сигнал бортовой аппаратурой командно-измерительной системы КА, демодулируют, формируют сигнал на ответной частоте и ретранслируют на наземный комплекс управления, получают искомое значение дальности по сдвигу фазы принятого сигнала относительно исходного либо с помощью пересчета времени задержки распространения сигнала. Обеспечивается комбинированное измерение дальности до КА при использовании как аналоговых, так и цифровых сигналов. 1 ил. 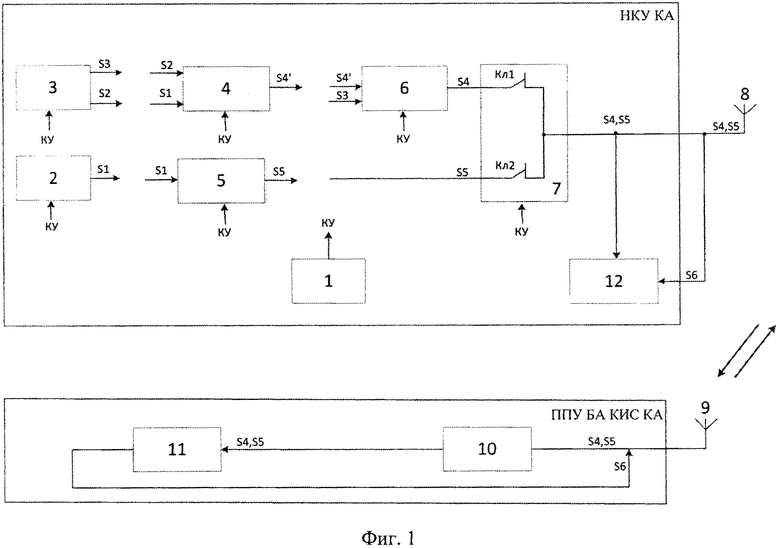
Способ измерения дальности до космического аппарата, включающий генерацию сигнала, его передачу с наземного комплекса управления космическим аппаратом по линии связи «Земля - космический аппарат», прием этого сигнала бортовой аппаратурой командно-измерительной системы космического аппарата, его ретрансляцию на наземный комплекс управления космическим аппаратом по линии связи «космический аппарат - Земля», отличающийся тем, что в способе измерения дальности до космического аппарата (КА) генерируют синусоидальный сигнал на частотах f2 и f1 (f1 обеспечивает решение неоднозначности, f2 обеспечивает точность измерений) и песеводслучайной последовательности (ПСП), которая модулирует частоту f1, причем частоты f1 и f2 выбираются исходя из следующих условий: 1) f2>>f1, 2) f1 и f2 не должны совпадать с частотами телеметрии (fТМ) и телекоманд (fТК), при этом ПСП реализуют со следующими характеристиками: длина ПСП выбирается из априорного расстояния до КА, форма заполнения битами 0 и 1 псевдослучайная, определяется исходя из наилучших автокорреляционных свойств, а на основе сгенерированных сигналов модулируют аналоговый или цифровой сигнал в зависимости от условий (аналоговая или цифровая модуляция), переносят на несущую частоту и передают полученный сигнал посредством передающего устройства наземного комплекса управления КА (НКУ КА) на приемо-передающее устройство бортовой аппаратуры командно-измерительной системы КА (ППУ БА КИС КА), а сигнал, принятый ППУ БА КИС КА, демодулируют, формируют сигнал на ответной частоте и ретранслируют на Землю, где по ретранслированному на Землю сигналу, принятому НКУ КА, получают искомое значение дальности либо по сдвигу фазы принятого сигнала относительно исходного, что соответствует методу измерения с помощью ПСП, либо с помощью пересчета времени задержки распространения сигнала, что соответствует тоновому методу.
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ МЕЖДУ КОСМИЧЕСКИМ АППАРАТОМ И СТАНЦИЯМИ | 2008 |
|
RU2401437C2 |
| СПОСОБ ФОРМИРОВАНИЯ НАВИГАЦИОННЫХ РАДИОСИГНАЛОВ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ (НКА) НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ (ГСО) И/ИЛИ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ (НКА) НА ГЕОСИНХРОННОЙ НАКЛОННОЙ ОРБИТЕ (ГСНО) С ПОМОЩЬЮ ЗЕМНЫХ СТАНЦИЙ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2474845C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2004 |
|
RU2304290C2 |
| RU 2008124881 A, 27.12.2009 | |||
| US 6864838 B2, 08.03.2005. | |||

