Изобретение относится к области гидроакустики и может быть использовано для измерения полевых акустических характеристик корабельных антенн.
Первичные измерения антенн, как правило, выполняются в лабораторных условиях, т.е. в опытовых измерительных бассейнах [1], где антенны и средства испытаний устанавливают на поворотно-координатных устройствах. В условиях бассейна невозможно измерить акустические характеристики антенн больших волновых размеров. Акустические характеристики антенн, установленных на объекте, отличаются от характеристик, измеренных в условиях бассейна, т.к. в реальных условиях корабельные конструкции могут значительно искажать полевые характеристики антенн.
Известен ряд способов измерений полевых акустических характеристик антенн, установленных на объекте. Так, в авторском свидетельстве СССР [2] эти характеристики измеряют с помощью измерительного координатного устройства (ИКУ), которое представляет собой многотонную конструкцию типа крана, устанавливаемую на палубе корабля. Помимо проблем, связанных с размещением ИКУ, в том числе транспортировкой ИКУ при следовании в полигон измерений, длина стрелы ИКУ ограничена, что не позволяет измерять характеристики антенн больших волновых размеров. Кроме того, корабельные конструкции не дают возможности измерять характеристики антенн, раскрывы которых обращены в траверсных или кормовых направлениях.
В патенте США [3] предлагается измерять полевые характеристики с помощью подводного аппарата (ПА), управляемого дистанционно. Поскольку на первый план здесь выходят задачи динамического позиционирования участвующих в измерениях объектов (корабль с измеряемой антенной и ПА со средствами измерений), измеряемые объекты в [3] ограничены стационарными системами типа трубопроводов (регистрация шумов от утечек нефтепродуктов) или антеннами, расположенными на морских платформах.
Наиболее близким по функциональным и конструктивным признакам к предлагаемому техническому решению является способ, представленный в патенте [4], а также устройство, реализующее этот способ, которые приняты за прототип. В патенте [4], описан способ определения характеристики направленности гидроакустической антенны посредством буксировки гидроакустического измерительного излучателя по различным траекториям вблизи измеряемой приемной антенны, которая размещена на дне водоема. В процессе буксировки измеряют расстояние между измерительным излучателем и измеряемой приемной антенной, а принятый приемной измеряемой антенной сигнал передают в береговую аппаратуру обработки. При обработке по известным расстояниям между излучателем и приемной антенной, а также по напряжениям, соответствующим этим расстояниям, вычисляют характеристику направленности (ХН) измеряемой антенны.
Предложенный в [4] способ и устройство, его реализующее, имеют ряд недостатков:
- невозможно измерить характеристики излучающих антенн;
- для вычисления ХН необходимо знать траверсное расстояние между излучателем и приемной антенной; откуда брать эти данные, а также уровень напряжения, соответствующий этому расстоянию, в [4] не указано;
- при буксировке практически невозможно выдержать равномерность хода и прямолинейность траектории буксируемого излучателя, что приводит к значительному повышению погрешностей полученных результатов;
- предлагаемое в [4] техническое решение невозможно использовать для корабельных антенн, т.к. отсутствуют средства динамического позиционирования измерительного средства (буксируемого аппарата) и измеряемой антенны.
Основной задачей предлагаемой системы и способа ее реализации является расширение функциональных возможностей измерительной системы при одновременном повышении качественных характеристик измерений, связанных с учетом реального размещения антенн и уменьшением погрешностей измерений.
Техническими результатами предлагаемой системы и способа ее реализации являются:
- возможность измерения характеристик как приемных, так и излучающих антенн, размещенных на реальных носителях;
- динамический учет текущих взаимных координат измерительного излучателя/приемника и измеряемой антенны;
- возможность измерения характеристик антенн в практически не ограниченном диапазоне частот;
- автоматический учет при измерениях реальных характеристик антенн, размещенных на объекте-носителе;
- возможность измерения в реальных условиях, близких к условиям эксплуатации.
Для решения поставленных задач и достижения заявляемого технического результата в измерительную систему, содержащую измеряемую приемную антенну (ИПА), аппаратуру обработки и регистрации и подводный аппарат, на котором установлена излучающая антенна (АИ1) и аппаратура формирования сигналов, введены новые признаки, а именно:
- дополнительно измеряемой является излучающая антенна,
- измеряемая приемная антенна (ИПА) и измеряемая излучающая антенна (ИАИ) установлены на корабле;
- дополнительно введены корабельный тракт управления (ТрУ) движением ПА и корабельный тракт измерения (ТрИ) характеристик антенн;
- ПА выполнен с возможностью перемещения по сигналам управления с ТРУ, передаваемым по кабелю, выполненному многожильным;
- на ПА дополнительно установлены первая приемная антенна (АП1), вторая излучающая антенна (АИ2) и вторая приемная антенна (АП2), причем антенны АП1, АИ1, АИ2, АП2 выполнены ненаправленными, а в состав аппаратуры ПА введен блок управления движением ПА (БУПА);
- на корабле дополнительно размещены третья излучающая антенна (АИ3), выполненная ненаправленной, и третья приемная антенна (АП3), выполненная в виде фазированной антенной решетки с возможностью формирования статического веера характеристик направленности в двух плоскостях, при этом АП1, АИ1 и БУПА соединены через кабель с ТрУ, АИ2 и АП2 соединены через кабель с ТрИ, ТрИ соединен с ИПА и с ИАИ, а ТрУ и ТрИ соединены с аппаратурой обработки и регистрации, выполненной пультовой, установленной на корабле.
В способ измерения, состоящий в перемещении по заданной траектории подводного аппарата (ПА) относительно измеряемой приемной антенны, излучении в сторону измеряемой приемной антенны (ИПА) сигнала первой излучающей антенной (АИ1), установленной на ПА, приеме излучаемого сигнала, вычислении дистанции и направления от АИ1 на ИПА, накоплении и обработке результатов измерений при перемещении ПА, введены новые признаки, а именно:
- дополнительно измеряемой является излучающая антенна, а измеряемую приемную антенну (ИПА) и измеряемую излучающую антенну (ИАИ) устанавливают на корабле;
- на ПА дополнительно устанавливают первую приемную антенну (АП1), вторую излучающую антенну (АИ2), вторую приемную антенну (АП2), причем антенны АП1, АИ1, АИ2, АП2 выполнены ненаправленными, а на корабле размещают третью излучающую антенну (АИ3), выполненную ненаправленной, и третью приемную антенну (АП3), выполненную в виде фазированной антенной решетки, формирующей статический веер характеристик направленности в двух плоскостях;
- производят управление траекторией движения ПА с корабельного тракта управления (ТрУ), передавая сигналы управления через кабель на блок управления движением ПА;
- излучают в сторону ПА сигнал с помощью антенны АИ3, принимают этот сигнал приемной антенной АП1 и передают через кабель в ТрУ, где определяют дистанцию до ПА;
- излучают сигнал установленной на ПА антенной АИ1, принимают этот сигнал корабельной приемной антенной АП3 и передают в ТрУ, где определяют угловые координаты ПА,
- информацию о текущей дистанции от корабля до ПА и текущих углах угловых координатах ПА передают в корабельный тракт измерения (ТрИ);
- для измерения характеристик измеряемой приемной антенны ИПА формируют сигнал заданной структуры в ТрИ, передают этот сигнал по кабелю на ПА и излучают его расположенной на ПА излучающей антенной АИ2;
- осуществляют прием этого сигнала измеряемой приемной антенной ИПА и передают в ТрИ, а накопление и обработку принятых сигналов в ТрИ осуществляют совместно с переданной из ТрУ информацией о координатах ПА;
- для измерения характеристик измеряемой излучающей антенны ИАИ принимают сигнал расположенной на ПА приемной антенной АП2, передают по кабелю принятый сигнал в ТрИ, где его накапливают и обрабатывают совместно с переданной из ТрУ информацией о координатах ПА.
Процесс измерения акустических характеристик состоит в определении чувствительности (для приемных антенн) или давления (для излучающих антенн) в зависимости от взаимных координат измерительной и измеряемой антенн [1]. Далее по измеренным чувствительности (давлению) вычисляют, используя данные по координатам для каждого значения измеряемых величин [4], характеристику направленности или максимальное значение чувствительности (давления).
В предлагаемом техническом решении измерение характеристик ИПА выполняется с помощью установленной на ПА измерительной излучающей антенны АИ2; измерение характеристик ИАИ выполняется с помощью установленной на ПА измерительной приемной антенны АП2. При измерениях принятые сигналы с ИПА и АП2 передаются в корабельный тракт измерения (ТрИ), при этом сигналы с АП2 передаются на корабль по кабелю.
Для того чтобы определить текущие координаты, соответствующие каждому измеренному значению чувствительности (давления), дополнительно устанавливают
- на корабле - ненаправленную излучающую антенну (АИ3) и приемную антенну (АП3), формирующую статический веер ХН в двух плоскостях;
- на подводном аппарате - ненаправленные излучающую (АИ1) и приемную (АП1) антенны.
Совокупность антенн АИ1, АП1, АИ3 и АП3 дает возможность в каждый момент времени получать информацию о взаимных координатах корабля и ПА, что осуществляется в корабельном тракте управления (ТрУ). Перемещение ПА по заданной траектории, в том числе для измерений характеристик различных корабельных антенн, осуществляется по сигналам, передаваемым из ТрУ по многожильному кабелю на ПА, где сигналы управления движением ПА отрабатываются блоком управления движением ПА (БУПА).
Таким образом решается задача измерения полевых характеристик излучающих и приемных антенн, расположенных на корабле.
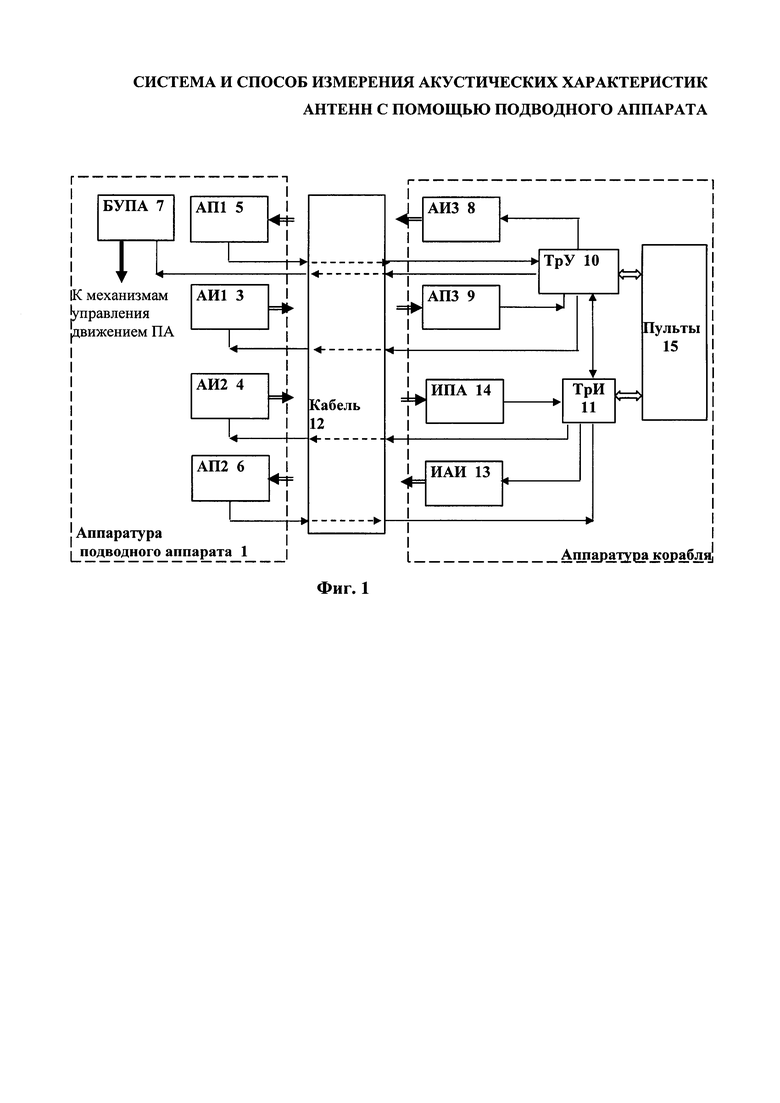
На фиг. 1 представлена обобщенная функциональная схема системы.
В состав системы входят аппаратура подводного аппарата 1 и аппаратура 2, размещенная на корабле.
На ПА 1 размещены излучающие измерительные антенны АИ1 3, АИ2 4 и приемные измерительные антенны АП1 5, АП2 6, а также блок 7 управления ПА (БУПА).
На корабле 2 размещены излучающая измерительная антенна АИ3 8 и приемная измерительная антенна АП3 9, а также тракты управления позиционированием ТрУ 10 и измерения координат ТрИ 11.
Аппаратура ПА 1 и корабля 2 соединены многожильным кабелем 12.
Измеряемыми корабельными антеннами являются излучающая антенна ИАИ 13 и приемная антенна ИПА 14.
Жилы кабеля 12 соединены с антеннами АИ1, АП1, АИ2, АП2 и блоком БУПА. Антенны АИ3 и АП3 соединены с трактом ТрУ, который соединен с трактом ТрИ, через кабель 12 тракт ТрУ соединен с антенной АИ1, а тракт ТрИ - с антенной АП2. Тракт ТрИ, кроме того, соединен с измеряемыми антеннами ИАИ и ИПА. Пульты 15 предназначены для обработки, регистрации данных, поступающих из ТрУ и ТрИ, а также для управления режимами движения ПА и измерений. На фиг. 1 отдельно не выделены
- блоки формирования сигналов управления и формирования сигналов при позиционировании, которые совмещены с трактом ТрУ 10;
- блоки формирования сигналов излучения измерительной антенной АИ2 4 и измеряемой антенной ИАИ 13; эти блоки входят в состав тракта ТрИ 11.
На фиг. 1 также опущены системы электропитания аппаратуры ПА и корабельной аппаратуры.
Работу системы и действия по заявляемому способу целесообразно рассматривать совместно.
После выхода в полигон испытаний корабль выпускает расположенный на его борту телеуправляемый ПА, при этом кабель 12 соединен с аппаратурой на ПА и на корабле. С пультов 15 передаются через тракт ТрУ 10 сигналы на включение на излучение измерительных излучающих антенн АИ1 5 и АИ3 8, а также на прием сигналов для позиционирования с приемных измерительных антенн АП1 5 и АП3 9. Сигнал, излучаемый антенной АИ3, принимается антенной АП1, принятый сигнал по кабелю 12 передается в приемный канал тракта ТрУ, где по времени между началом излучения и приема с учетом скорости звука определяется текущее расстояние между ПА и кораблем. Сигнал, излучаемый антенной АИ1 3, принимается измерительной приемной антенной АП3 9, которая формирует статический веер ХН. Сигнал, принятый антенной АП3, передается в тракт ТрУ, где определяются текущие курсовой угол и угол места ПА. Таким образом, оказываются известными координаты ПА относительно корабля. Эти данные поступают в пульты 15, где строится траектория движения ПА для вывода ПА в точку пространства с целью измерения характеристик выбранной корабельной антенны. Процесс определения текущих координат выполняется в течение всего цикла измерений.
Для измерения характеристик излучающей антенны ПА с помощью команд из пультов 15 через тракт ТрУ выводится на направление, соответствующее максимуму излучения измеряемой излучающей антенны ИАИ 13. Антенна ИАИ излучает сигнал, который принимается измерительной приемной антенной АП2 6, расположенной на ПА. Выполняют настройку на максимум сигнала по известной методике [1] путем изменения местоположения ПА относительно корабля. При настройке выбирается и фиксируется уровень сигнала излучения антенной ИАИ, который в дальнейшем, для измерения характеристик данной измеряемой антенны остается неизменным, уровень максимального принятого антенной АП2 сигнала запоминается и передается в тракт ТрИ. Далее, продолжая излучение антенной ИАИ, перемещают ПА по заданной траектории (в секторе измерения ХН) с помощью сигналов управления, которые по кабелю 12 передаются в блок БУПА 7. Принятый антенной АП2 массив сигналов передается в тракт ТрИ, где сопоставляется с соответствующими текущими координатами, приводится к общему расстоянию (аналитическое выражение приведено в [4]) и нормируется к значению максимума. Нормированный массив представляет собой ХН, а максимальное значение - уровень акустического давления, развиваемого антенной ИАИ на том расстоянии, где было измерено это максимальное значение давления. Данные по ХН и давлению передаются на пульты 15 для дальнейшего анализа, документирования и т.п.
Для измерения характеристик приемной антенны ПА с помощью команд из пультов 15 через тракт ТрУ выводится на направление, соответствующее максимуму чувствительности измеряемой приемной антенны ИПА 14. Настройку на максимум чувствительности осуществляют по аналогии с настройкой на максимум излучения антенны ИАИ, но при этом излучают измерительной излучающей антенной АИ2 4, расположенной на ПА. Максимальное значение чувствительности вместе с соответствующими координатами запоминается. Действия по измерению ХН приемной антенны аналогичны действиям по измерению ХН излучающей антенны, но излучение постоянного уровня осуществляют антенной АИ2.
По окончании измерений ПА подводят к кораблю и подымают на борт.
В заявляемой системе используются известные технические решения по конструкциям и работе входящих в систему устройств. Принцип работы, конструктивные характеристики излучающих и приемных антенн изложены в книге [6]. Тракты ТрУ и ТрИ выполняются как аппаратно-программные средства гидроакустических систем и описаны в книге [7]. Подводные аппараты, в том числе телеуправляемые, а также системы и средства управления движением ПА представлены в [8].
Введение в систему измерения акустических характеристик новых существенных признаков обеспечивает заявленный технический результат, связанный не только с расширением номенклатуры измеряемых антенн, но и с учетом различных факторов работы антенн в реальных условиях. В частности:
- имеется возможность измерения характеристик любых типов антенн, как приемных, так и излучающих;
- учитывается и фиксируется динамический процесс изменения текущих взаимных координат измерительного излучателя/приемника и измеряемой антенны, что позволяет производить измерения на изменяемой в процессе измерений измерительной базе, в том числе на течениях, при дрейфе и т.п.;
- измерения характеристик антенн можно выполнять в практически не ограниченном диапазоне частот, оперативно изменяя измерительные антенны, заранее установленные на ПА;
- автоматически учитываются реальные полевые характеристики антенн, с учетом их размещения, влияния корабельных конструкций или донной/поверхностной реверберации (отражений);
- измерения выполняются в реальных условиях, близких к условиям эксплуатации.
Предлагаемая система может быть использована для измерений акустических характеристик антенн надводных кораблей и подводных лодок, для измерения характеристик длинномерных антенн, в том числе буксируемых. Дополнительно можно использовать систему при измерениях шумности различных объектов, в том числе для измерения шумности при различной скорости движения шумящего объекта.
Источники информации
1. Колесников А.Е. Акустические измерения. Л., Судостроение, 1983.
2. Авт. свид. СССР №1840603. Способ измерения собственного подводного шумоизлучения и шумоизмеритель. МПК G01K 11/00. Заявл. 06.02.1989, опубл. 20.08.2007.
3. Пат. США №5047990. Underwater acoustic data acquisition system. МПК G01S 1/72, 15/89. Заявл. 01.06.1990, опубл. 10.09.1991.
4. Патент РФ №2029314. Способ определения характеристики направленности гидроакустической антенны. МПК G01S 3/80. Заявл. 15.09.1992, опубл. 20.02.1995 (ПРОТОТИП).
5. Патент РФ №2551834. Способ телеуправления подводным аппаратом. МПК B63G 5/00, G01S 5/74. Заявл. 04.12.2013, опубл. 27.05.2015.
6. Смарышев М.Д., Добровольский Ю.Ю. Гидроакустические антенны. Л., Судостроение, 1984.
7. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. СПб: Наука, 2004.
8. Войтов Д.В. Телеуправляемые необитаемые подводные аппараты. М.: Моркнига, 2012.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА | 2012 |
|
RU2515125C1 |
| СПОСОБ ПОВЕРКИ УЛЬТРАЗВУКОВЫХ АНЕМОМЕТРОВ И ПОРТАТИВНЫЕ УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2568993C1 |
| ПРИЕМНЫЙ ТРАКТ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ С ЛИНЕЙНОЙ АНТЕННОЙ, УСТРАНЯЮЩИЙ НЕОДНОЗНАЧНОСТЬ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА СИГНАЛА | 2000 |
|
RU2190237C2 |
| Гидроакустическая станция для обнаружения малоразмерных объектов | 2017 |
|
RU2680673C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2019 |
|
RU2715409C1 |
| Устройство для измерения характеристики направленности гидроакустической антенны | 2017 |
|
RU2690054C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2017 |
|
RU2653956C1 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС | 2013 |
|
RU2531042C1 |
| СПОСОБ ИЗМЕРЕНИЯ СОСТАВЛЯЮЩИХ СУММАРНОЙ ПОМЕХИ РАБОТЕ ПАССИВНОЙ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ | 2016 |
|
RU2624999C1 |
| Акустический доплеровский способ профилирования течений в водной среде | 2024 |
|
RU2840131C1 |
Изобретение относится к области гидроакустики и может быть использовано для измерения полевых акустических характеристик корабельных антенн. Для измерения полевых характеристик корабельных приемных и излучающих антенн на подводном аппарате (ПА) установлены две излучающие антенны (АИ1, АИ2) и две приемные антенны (АП1, АП2). Антенны, установленные на ПА, выполнены ненаправленными. На корабле дополнительно установлены ненаправленная излучающая антенна (АИ3) и приемная антенна (АП3), формирующая статический веер характеристик направленности (ХН). Управление движением ПА осуществляется по кабелю по сигналам с корабельного тракта управления (ТрУ). Обработка информации, связанная с вычислением необходимых акустических характеристик корабельных антенн, производится в тракте измерений (ТрИ), установленном на корабле. Для измерения акустических характеристик корабельных антенн осуществляют движение ПА по заданной траектории. При измерении характеристик излучающей антенны ее сигнал принимают измерительной приемной антенной АП2, расположенной на ПА; принятый сигнал передают по кабелю в ТрИ. Одновременно с излучением измеряемой корабельной антенны осуществляют излучение и прием навигационных сигналов, с помощью которых определяют текущие взаимные координаты ПА и корабельной измеряемой антенны. Для измерения дистанции используют корабельную излучающую антенну АИ3, прием ее сигналов осуществляется антенной АП2 на ПА и передается в ТрИ, где вычисляется дистанция. Для измерения угловых координат с ПА излучают сигнал с помощью антенны АИ1, этот сигнал принимают корабельной антенной АП3 и передают в ТрИ, где вычисляют текущие угловые координаты. Таким образом, для каждого взаимного положения ПА и измеряемой антенны в ТрИ имеются данные о взаимных координатах и уровне давления. По совокупности этих данных, приведенных к одной дистанции по известным аналитическим выражениям, определяют ХН излучающей антенны и давление на оси главного максимума. Измерение характеристик приемных корабельных антенн осуществляют аналогично, но излучение осуществляют с помощью установленной на ПА излучающей антенны АИ3. 2 н.п. ф-лы, 1 ил.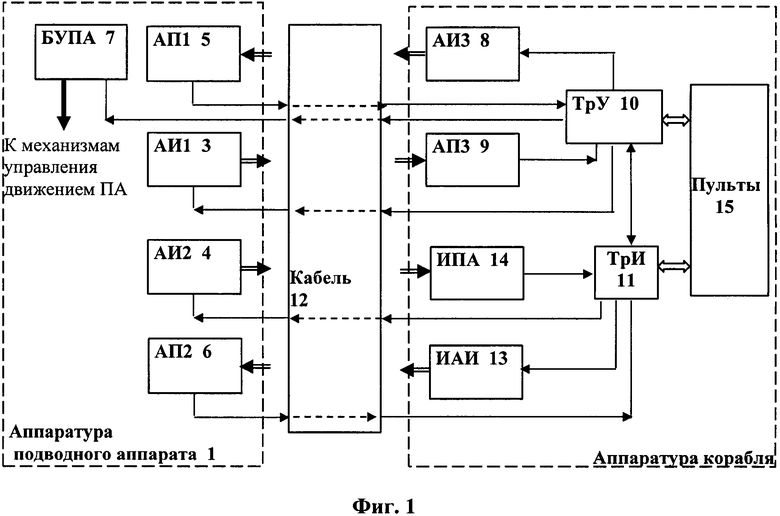
1. Система измерения акустических характеристик антенн, содержащая измеряемую приемную антенну, аппаратуру обработки и регистрации и подводный аппарат (ПА), на котором установлена первая излучающая антенна (АИ1) и аппаратура формирования сигналов, отличающаяся тем, что дополнительно измеряемой является излучающая антенна, измеряемая приемная антенна (ИПА) и измеряемая излучающая антенна (ИАИ) установлены на корабле, дополнительно введены корабельный тракт управления (ТрУ) движением ПА и корабельный тракт измерения (ТрИ) характеристик антенн, ПА выполнен с возможностью перемещения по сигналам управления с ТРУ, передаваемым по кабелю, выполненному многожильным, на ПА дополнительно установлены первая приемная антенна (АП1), вторая излучающая антенна (АИ2) и вторая приемная антенна (АП2), причем антенны АП1, АИ1, АИ2, АП2 выполнены ненаправленными, а в состав аппаратуры ПА введен блок управления движением ПА (БУПА), на корабле дополнительно размещены третья излучающая антенна (АИ3), выполненная ненаправленной, и третья приемная антенна (АП3), выполненная в виде фазированной антенной решетки с возможностью формирования статического веера характеристик направленности в двух плоскостях, при этом АП1, АИ1 и БУПА соединены через кабель с ТрУ, АИ2 и АП2 соединены через кабель с ТрИ, ТрИ соединен с ИПА и с ИАИ, а ТрУ и ТрИ соединены с аппаратурой обработки и регистрации, выполненной пультовой, установленной на корабле.
2. Способ измерения акустических характеристик антенн, состоящий в перемещении по заданной траектории подводного аппарата (ПА) относительно измеряемой приемной антенны, излучении в сторону измеряемой приемной антенны (ИПА) сигнала первой излучающей антенной (АИ1), установленной на ПА, приеме излучаемого сигнала и вычислении дистанции и направления от излучателя на измеряемую антенну, накоплении и обработке результатов измерений при перемещении ПА, отличающийся тем, что дополнительно измеряемой является излучающая антенна, а измеряемую приемную антенну (ИПА) и измеряемую излучающую антенну (ИАИ) устанавливают на корабле; на ПА дополнительно устанавливают первую приемную антенну (АП1), вторую излучающую антенну (АИ2), вторую приемную антенну (АП2), причем антенны АП1, АИ1, АИ2, АП2 выполнены ненаправленными, а на корабле размещают третью излучающую антенну (АИ3), выполненную ненаправленной, и третью приемную антенну (АП3), выполненную в виде фазированной антенной решетки с возможностью формирования статического веера характеристик направленности в двух плоскостях; производят управление траекторией движения ПА с корабельного тракта управления (ТрУ), передавая сигналы управления через кабель на блок управления движением ПА; излучают в сторону ПА сигнал с помощью антенны АИ3, принимают этот сигнал приемной антенной АП1 и передают через кабель в ТрУ, где определяют дистанцию до ПА; излучают сигнал установленной на ПА антенной АИ1, принимают этот сигнал корабельной приемной антенной АП3 и передают в ТрУ, где определяют угловые координаты ПА, информацию о текущей дистанции от корабля до ПА и текущих углах угловых координатах ПА передают в корабельный тракт измерения (ТрИ); для измерения характеристик измеряемой приемной антенны ИПА формируют сигнал заданной структуры в ТрИ, передают этот сигнал по кабелю на ПА, излучают расположенной на ПА излучающей антенной АИ2; осуществляют прием этого сигнала измеряемой приемной антенной ИПА и передают в ТрИ, а накопление и обработку принятых сигналов в ТрИ осуществляют совместно с переданной из ТрУ информацией о координатах ПА; для измерения характеристик измеряемой излучающей антенны ИАИ принимают сигнал расположенной на ПА приемной антенной ПА2, передают по кабелю принятый сигнал в ТрИ, где его накапливают и обрабатывают совместно с переданной из ТрУ информацией о координатах ПА.
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИКИ НАПРАВЛЕННОСТИ ГИДРОАКУСТИЧЕСКОЙ АНТЕННЫ | 1992 |
|
RU2029314C1 |
| СИСТЕМА ТЕЛЕУПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2013 |
|
RU2551834C1 |
| СИСТЕМА АКУСТИЧЕСКОЙ ТОМОГРАФИИ ГИДРОФИЗИЧЕСКИХ И ГЕОФИЗИЧЕСКИХ ПОЛЕЙ В МОРСКОЙ СРЕДЕ | 2015 |
|
RU2602993C1 |
| СПОСОБ АКУСТИЧЕСКОЙ ТОМОГРАФИИ ГИДРОФИЗИЧЕСКИХ И ГЕОФИЗИЧЕСКИХ ПОЛЕЙ В МОРСКОЙ СРЕДЕ | 2015 |
|
RU2602770C1 |
| US 5047990 A1, 10.09.1991. | |||

