Изобретение относится к области гидроакустики и может быть использовано для обнаружения малоразмерных целей, в том числе в. акваториях, нуждающихся в охране от несанкционированного проникновения.
Гидроакустическая станция для обнаружения малоразмерных целей имеет типовую структуру гидролокатора [1], а основная специфика состоит в том, что частота зондирующего сигнала должна быть достаточно высокой, сектор обзора охватывает в горизонтальной плоскости 360°, а в вертикальной плоскости должен обеспечивать освещение всего водоема по глубине.
Предложен ряд способов и устройств, с помощью которых можно обнаруживать малоразмерные цели. В патенте [2] предлагается по периметру охраняемой акватории установить акустические отражатели, а в центре - приемно-излучающую антенну. Если нарушитель пересекает акустический луч, эхосигнал по соответствующему каналу будет отсутствовать. Этот способ может быть работоспособным только при очень небольших расстояниях между антенной и отражателем, когда можно не учитывать изменяющиеся гидрологические условия.
В патенте [3] предложена стационарно устанавливаемая на дне водоема система с выпускаемыми антеннами. Несмотря на мощную опору, такая система может устойчиво работать только при ровном дне и должна обладать механизмом выпуска акустических антенн из контейнера.
В патенте [4] акустическая антенна выполнена линейной и выдвигается на штанге, которую механически вращают. Такое техническое решение значительно увеличивает время обзора, исключает возможность автоматического сопровождения цели и одновременного обнаружения нескольких целей, что необходимо в связи с поставленными задачами по охраняемому водоему.
Наиболее близким по функциональным и конструктивным признакам к предлагаемому техническому решению является гидролокационная станция кругового обзора [5]. Устройство-прототип имеет типовую структуру гидролокатора [1], содержит цилиндрическую антенну с электроакустическими преобразователями, формирующую однолучевую характеристику направленности (ХН) в горизонтальной плоскости. Антенна через переключатель прием/передача соединена с генераторным устройством и с трактом приема, куда входят прибор обработки информации и пультовой прибор. Круговой обзор пространства осуществляется путем поворота ХН в горизонтальной плоскости, одновременно на мониторе пультового прибора отображается положение обнаруженных целей в координатах дистанция-курсовой угол.
Предложенная в [5] гидролокационная станция имеет ряд недостатков:
- последовательный обзор пространства с помощью поворота луча ХН значительно увеличивает время обзора сектора наблюдения;
- последовательный обзор пространства не обеспечивает одновременного наблюдения нескольких целей и снижает точность их автоматического сопровождения, что является актуальным при обнаружении, в частности, подводных пловцов;
- отсутствует возможность управления ХН в вертикальной плоскости, что необходимо при неблагоприятных гидрологоакустических условиях для реализации оптимального режима излучения.
Основной задачей предлагаемого технического решения является повышение эффективности устройства.
Технический результат заключается в обеспечении возможности наблюдения и автоматического сопровождения одновременно нескольких целей во всем контролируемом пространстве (360°) в горизонтальной плоскости при сокращении времени, необходимого для обнаружения и классификации целей и повышении эффективности устройства в том числе путем оптимизации режима излучения, повышения устойчивости к электромагнитным помехам, контроля и учета положения погружаемой части.
Для достижения заявляемого технического результата в гидроакустической станции для обнаружения малоразмерных объектов, содержащей гидроакустическую цилиндрическую антенну с электроакустическими преобразователями, прибор обработки, пультовой прибор и генераторное устройство (ГУ),
введены новые признаки, а именно:
- гидроакустическая станция выполнена состоящей из бортовой и погружаемой частей, соединенных грузонесущим кабелем;
- в состав погружаемой части входят гидроакустическая цилиндрическая антенна, аппаратура предварительной обработки (АПО) и ГУ;
- АПО и ГУ выполнены многоканальными;
- в состав бортовой части входят прибор обработки и пультовой прибор;
- в состав бортовой и погружаемой частей дополнительно включены оптико-электронные преобразователи, ОЭПБ и ОЭПП, соответственно, причем ОЭПБ размещен в приборе обработки, а ОЭПП размещен в АПО;
- цилиндрическая акустическая антенна состоит из двух независимых антенн - приемной и излучающей, выполненных в виде фазированных антенных решеток, причем приемная антенна выполнена с возможностью формирования статического веера характеристик направленности (ХН) в горизонтальной плоскости, а излучающая антенна выполнена ненаправленной в горизонтальной плоскости и с управляемой ХН в вертикальной плоскости;
- грузонесущий кабель выполнен многожильным, часть его жил выполнена токопроводящими, а часть представляет собой волоконно-оптические линии, при этом токопроводящие жилы кабеля использованы для подачи электропитания на ГУ и АПО;
- АПО двухсторонней связью через ОЭПП, волоконно-оптические линии кабеля и ОЭПБ соединена с прибором обработки,
- первый многоканальный информационный вход АПО соединен с выходами электроакустических преобразователей приемной антенны, информационный выход АПО соединен с информационным входом ГУ;
- выходы ГУ соединены с входами электроакустических преобразователей излучающей антенны, а прибор обработки двусторонней связью соединен с пультовым прибором.
Для уменьшения уровня помех и конструктивной оптимизации погружаемая часть выполнена в виде цилиндрического герметичного контейнера, закрытого съемными крышками, внутри которого размещены ГУ и АПО, а электроакустические преобразователи приемной и излучающей антенн расположены на его стенках.
С целью контроля и учета положения погружаемой части в горизонтальной и угломестной плоскостях, а также контроля расположения антенны по глубине в состав погружаемой части введены блоки контроля положения (БКП) и датчика давления (ДД), которые размещены в герметичном цилиндрическом контейнере, причем второй и третий информационные входы АПО соединены с выходами БКП и ДД.
Разделение антенны на приемную и излучающую позволяет выбрать оптимальные параметры электроакустических приемных и излучающих преобразователей, создавать различные ХН для режимов излучения и приема, обеспечив возможность одновременного обзора всего сектора 360° и выполнять автоматическое сопровождение нескольких целей, а также исключить необходимость коммутации, а использование многоканальных АПО и ГУ обеспечивает проведение одновременного обзора всего сектора и автоматического сопровождения нескольких целей оптимальным образом.
Введение БКП дает возможность контроля положения погружаемого контейнера, учета его поворота и отклонения от вертикального положения вследствие дрейфа или влияния течения, что уменьшает уровень излучаемого и принимаемого сигнала в заданном направлении и снижает точность определения направления на цель.
Оптико-электронное преобразование информационных сигналов для передачи по длинному кабелю значительно уменьшает влияние помех электромагнитного происхождения.
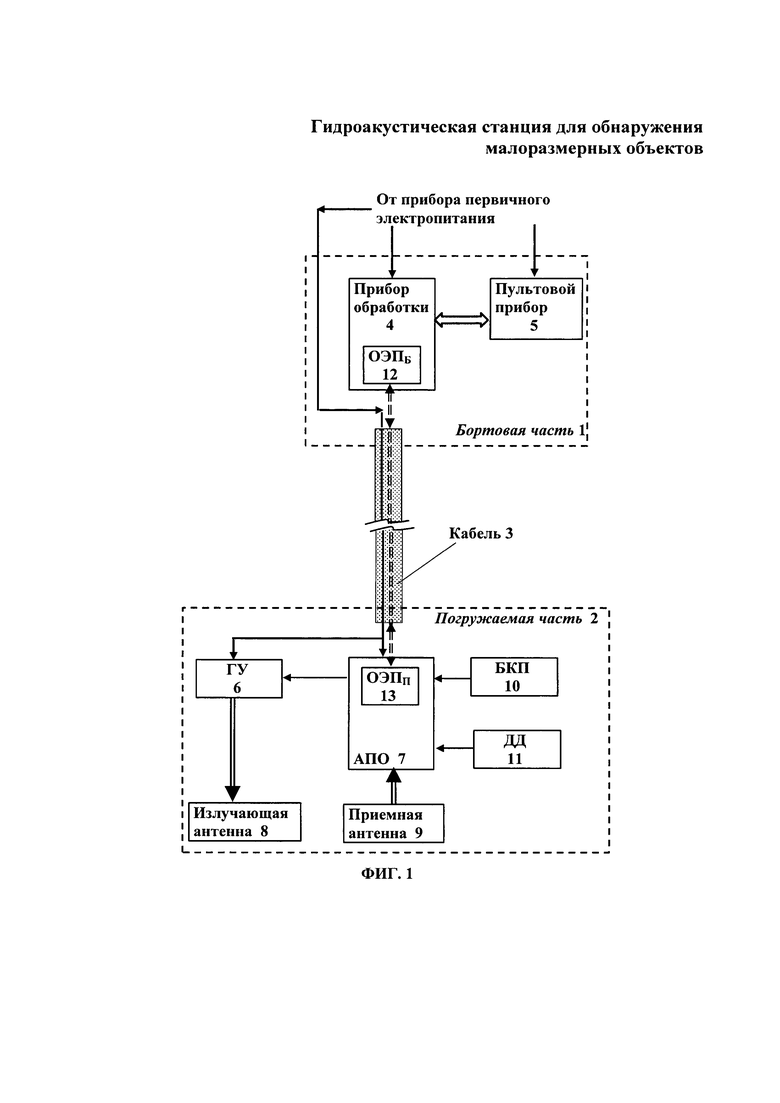
Сущность изобретения поясняется фиг. 1, на которой представлена обобщенная функциональная схема гидроакустической станции.
В состав гидроакустической станции входят бортовая часть 1 и погружаемая часть 2, соединенные грузонесущим кабелем 3. Кабель 3 содержит токопроводящие (медные) жилы и оптоволоконные линии связи, которые на фиг. 1 обозначены сплошными  и двойными пунктирными
и двойными пунктирными  линиями, соответственно.
линиями, соответственно.
Бортовая часть 1 включает прибор обработки 4, пультовой прибор 5 и прибор первичного электропитания (не показан на фиг. 1). Прибор обработки 4 и пультовой прибор 5 соединены двухсторонней связью: между ними происходит обмен информацией в цифровом формате. От прибора первичного электропитания передается электропитание по токопроводящим жилам кабеля 3 в аппаратуру, размещенную в погружаемой части 2, а также в прибор обработки 4 и в пультовой прибор 5.
В погружаемой части 2 размещены ГУ 6, блок АПО 7, излучающая антенна 8, приемная антенна 9, БКП 10 и ДД 11. Электропитание от прибора первичного электропитания, размещенного в бортовой части, через кабель 3 передается на ГУ 6 и блок АПО 7; электропитание БКП 10 и ДД 11 осуществляется от источника вторичного электропитания, который входит в состав ГУ (не показан на фиг. 1).
Из прибора обработки 4 через ОЭПБ 12 по волоконно-оптическим линиям кабеля 3 и через ОЭПП 13 передаются управляющие сигналы на блоки АПО 7. Из блоков АПО 7 передаются управляющие сигналы на ГУ 6, в каналах которого формируются сигналы заданной структуры и уровня, подаваемые на излучающие электроакустические преобразователи излучающей антенны 8. Эхосигналы от цели и другие принятые сигналы принимаются электроакустическими приемниками приемной антенны 9, передаются в блоки АПО 7, где, после первичной обработки, формируются массивы данных в цифровом формате, преобразуемые в ОЭПП 13 и передаваемые через кабель 3 и ОЭПБ 12 в прибор обработки 4. После дальнейшей обработки массивы данных передаются в пультовой прибор 5, где формируется сообщение (в цифро-буквенном и/или графическом формате) для предъявления оператору.
Данные, выработанные БКП 10 и ДД 11 также передаются в АПО 7 и через ОЭПП, кабель, ОЭПБ поступают в прибор обработки 4 и далее в пультовой прибор 5.
Конструктивно погружаемая часть 2 представляет собой герметичный контейнер цилиндрической формы, закрытый крышками; фланец верхней крышки соединен механически с фланцем кабеля 3, через них проходят электрические и оптико-волоконные соединения; нижняя крышка контейнера съемная, что облегчает установку и доступ к аппаратуре погружаемой части. Электроакустические преобразователи обеих частей цилиндрической антенны размещены в стенках цилиндрического контейнера и герметизированы. Дополнительно на стенках цилиндра установлены выступы для предотвращения от ударов при транспортировке и в процессе эксплуатации.
Конструктивные и иные характеристики отдельных узлов и элементов, составляющих заявляемую гидроакустическую станцию, известны из литературы.
Антенны 8 и 9 предназначены для преобразования акустических сигналов в электрические (в приеме), электрических сигналов в акустические (при излучении). Сведения о конструкциях цилиндрических многоэлементных антенн 8 и 9 представлены в [6].
Генераторное устройство 6 выполняет функции формирования и усиления зондирующего сигнала, излучаемого антенной 8. Кроме того, в ГУ формируются напряжения вторичного электропитания для возбуждения блоков ГУ, БКП, ДД [7].
Многоканальная аппаратура предварительной обработки 7 выполняется на аналоговых или аналого-цифровых средствах. Основные функции АПО -усиление и фильтрация в каждом канале сигналов, принятых от приемной антенны 9 в аналоговой форме. Далее сигналы оцифровываются, формируются в пакеты и через ОЭБП по оптическим линиям передаются в прибор обработки 4. В зависимости от построения схемы обработки в АПО может быть реализовано преобразование данных из аналогового вида в цифровой [1, 7].
Прибор обработки 4 и пультовой прибор 5 являются цифровыми приборами, они имеют в своем составе процессоры с системным и функциональным программным обеспечением. Пультовой прибор может быть выполнен как ноутбук в промышленном исполнении. При необходимости в пультовом приборе могут быть предусмотрены порты для подключения периферийных устройств или для передачи данных во внешние системы [1].
Описание работы БКП 10 представлено в статье [8]. Блок ДД представляет собой манометр с цифровым выходом.
Гидроакустическая станция предназначена для установки на корабле-носителе. В походном положении кабель намотан на катушку спуско-подъемного устройства (в зависимости от комплектации может входить в состав заявляемой гидроакустической станции или в состав аппаратуры корабля-носителя обеспечения). После выхода в район подводного наблюдения погружаемую часть выпускают на заданную глубину.
Работой станции управляет оператор, который размещается за пультом управления. После включения подачи электропитания и загрузки программного обеспечения, контроля исправности оператор выбирает необходимый режим работы, а также, в зависимости от гидролого-акустических условий, выбирает горизонт, на который подымает/опускает погружаемую часть 2. Далее оператор выбирает параметры зондирующего сигнала (структуру, уровень, длительность, скважность), задает (при необходимости) амплитудное распределение на излучающей антенне 8 и включает режим излучения. Команда на излучение с кодами зондирующего сигнала и другими служебными кодами передается через прибор обработки 4, ОЭПБ, кабель 3, ОЭПП в АПО 7, где вырабатывается управляющая команда для ГУ 6. В соответствии с содержанием этой команды в ГУ 6 формируется зондирующий сигнал, а также формируется необходимое амплитудное распределение по каналам. Усиленные в многоканальном усилителе мощности сигналы поступают на электроакустические преобразователи излучающей антенны 8, преобразуются в акустические сигналы и излучаются в водную среду.
Отраженные сигналы попадают на приемные электроакустические преобразователи антенны 9, преобразуются в электрические сигналы и поступают на входы многоканального АПО 7. В АПО 7 сигналы усиливаются, производится широкополосная фильтрация, далее сигналы с помощью аналого-цифровых преобразователей каналов АПО преобразуются в цифровые, упаковываются. Упакованные массивы преобразуются в ОЭПП в массивы оптического типа, по кабелю и ОЭПБ передаются в прибор обработки 4. Одновременно из БКП 10 и ДД 11 через АПО 7, ОЭПП, кабель 3, ОЭПБ в прибор обработки поступают данные о положении погружаемой части, в том числе о ее ориентации в пространстве.
В приборе обработки 4 выполняется последующая обработка, результаты которой передаются в пультовой прибор и в конечном счете предъявляются оператору. В числе данных для оператора - координаты цели, элементы ее движения, класс цели др. В зависимости от выбранной конфигурации алгоритмов обработки и ПО прибора обработки 4 и пультового прибора 5 конечные функции могут быть разделены между средствами прибора обработки и пультового прибора. Оператор принимает решение о передаче данных об обнаруженной цели во внешние системы или это происходит автоматически. Таким образом, оказывается решенной задача подводного наблюдения [1], состоящая в обнаружении цели, определении ее координат, классификации (идентификации).
Введение в гидроакустическую станцию новых существенных признаков обеспечивает заявленный технический эффект:
- одновременное обнаружение целей во всем заданном секторе обзора (360°);
- возможность обнаружения и сопровождения нескольких целей;
- возможность управления шириной ХН и ее наклоном в режиме излучения, что обеспечивает адаптацию к условиям распространения и к глубине расположения цели;
- учет поворота опускаемой части, подвешенной на гибком кабеле, а также отклонения положения от вертикали;
- повышение устойчивости к помехам электромагнитного происхождения.
Устройство обеспечивает заявленный технический эффект и может использоваться для обнаружения малоразмерных целей, в том числе находящихся в акваториях с потенциально опасными и охраняемыми объектами.
Источники информации
1. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. СПб: Наука, 2004
2. Патент РФ №2150123. Способ обнаружения вторжения подводного объекта в контролируемую область натурного водоема. МПК G01S 3/80, 15/04. Заявл. 16.06.1999, публ. 27.05.2000
3. Патент РФ №2407036. Выносное гидроакустическое устройство. МПК G01S 15/04. Заявл. 04.05.2008, публ. 20.12.2010
4. Патент РФ №2568339. Гидроакустическая система освещения боижней обстановки. МПК G01S 15/02. Заявл. 10.07.2014, публ. 20.11.2015
5. Патент РФ №2242021. Гидролокационный способ обнаружения подводных объектов, движущихся с малой радиальной скоростью в контролируемой акватории, и гидролокационная станция кругового обзора, реализующая этот способ. МПК G01S 15/02. Заявл. 15.07.2002, публ. 10.12.2004 (ПРОТОТИП)
6. Смарышев М.Д., Добровольский Ю.Ю. Гидроакустические антенны. Л., Судостроение, 1984
7. Справочник по гидроакустике, 2-е изд. Л.: Судостроение, 1988.
8. Желтаков А.В., Семенова С.А. Система ориентации гидроакустической протяженной буксируемой антенны (ГПБА) // Подводные исследования и робототехника, 2011. №2 (12). С. 56-63
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидролокатор кругового обзора автономного необитаемого подводного аппарата | 2020 |
|
RU2754604C1 |
| Система противоторпедной защиты гидроакустического комплекса подводной лодки | 2016 |
|
RU2661066C1 |
| Беспроводной рыбопоисковый эхолот | 2022 |
|
RU2797778C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| Многолучевой эхолот автономного необитаемого подводного аппарата | 2021 |
|
RU2759497C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ЛЕДОВОГО ПОЛЯ | 2014 |
|
RU2559311C1 |
| Система определения координат буксируемого комплекса | 2018 |
|
RU2684273C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ АЙСБЕРГА | 2014 |
|
RU2548596C1 |
| Система шумопеленгования гидроакустического комплекса подводной лодки | 2016 |
|
RU2660377C2 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЯ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО ГЕОФИЗИЧЕСКОГО СУДНА | 2010 |
|
RU2424538C1 |
Изобретение относится к области гидроакустики и может быть использовано для обнаружения малоразмерных целей, в том числе в акваториях, нуждающихся в охране от несанкционированного проникновения. Заявленная гидроакустическая станция состоит из бортовой и погружаемой частей, соединенных грузонесущим кабелем, в котором часть жил является токопроводящими, а часть представляет собой волоконно-оптические линии. В бортовую часть входят прибор обработки и пультовой прибор. В состав погружаемой части входят цилиндрическая акустическая антенна, генераторное устройство (ГУ), аппаратура предварительной обработки (АПО), блок контроля положения и датчик давления. Антенна состоит из двух независимых антенн - приемной и излучающей, выполненных в виде фазированных антенных решеток, причем приемная антенна выполнена с возможностью формирования статического веера характеристик направленности (ХН) в горизонтальной плоскости, а излучающая антенна выполнена ненаправленной в горизонтальной плоскости и с управляемой ХН в вертикальной плоскости. Конструктивно погружаемая часть выполнена в виде цилиндрического герметичного контейнера, закрытого съемными крышками, внутри которого размещены ГУ, АПО, блок контроля положения и датчик давления, а электроакустические преобразователи приемной и излучающей антенн расположены на стенках контейнера. Технический результат - обеспечение возможности наблюдения и автоматического сопровождения одновременно нескольких целей во всем контролируемом пространстве (360°) в горизонтальной плоскости при сокращении времени, необходимого для обнаружения и классификации целей, и повышение эффективности устройства, в том числе путем оптимизации режима излучения, повышения устойчивости к электромагнитным помехам, контроля и учета положения погружаемой части. 2 з.п. ф-лы, 1 ил.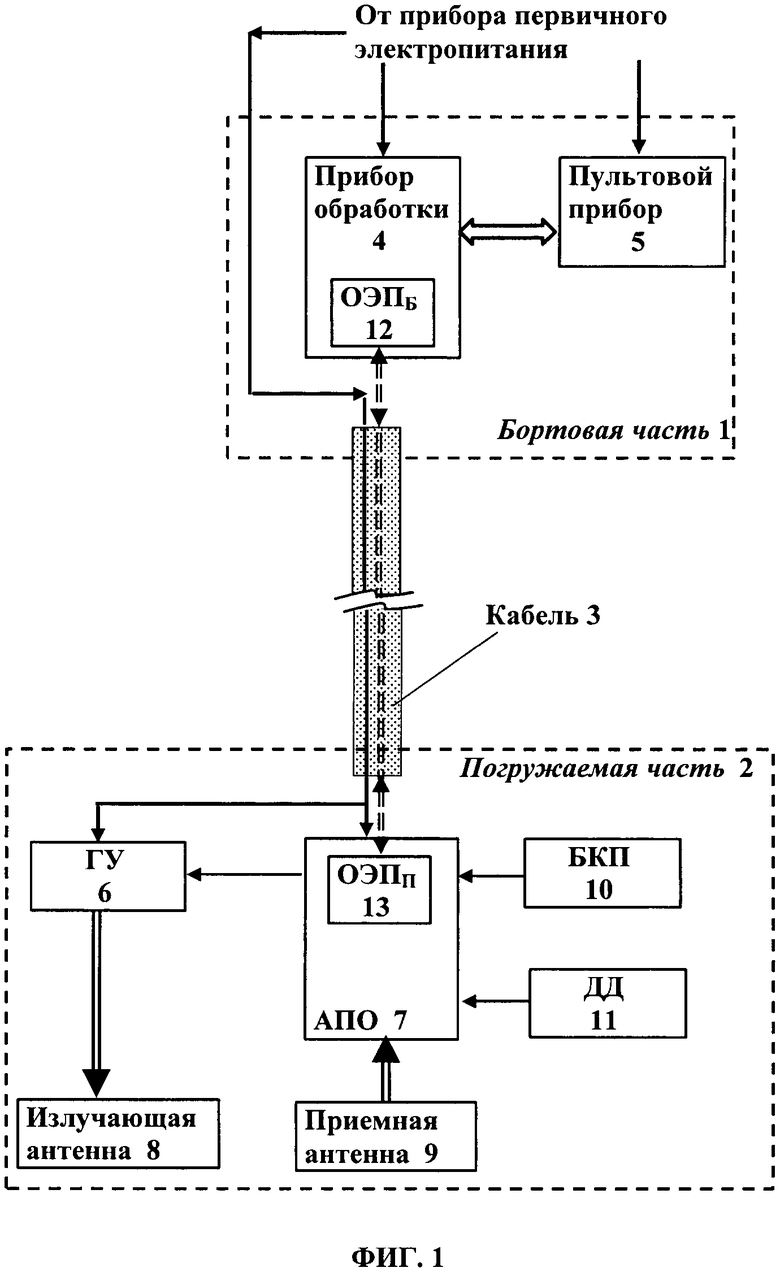
1. Гидроакустическая станция для обнаружения малоразмерных объектов, содержащая гидроакустическую цилиндрическую антенну с электроакустическими преобразователями, прибор обработки, пультовой прибор и генераторное устройство (ГУ), отличающаяся тем, что гидроакустическая станция выполнена состоящей из бортовой и погружаемой частей, соединенных грузонесущим кабелем; при этом в состав погружаемой части входят гидроакустическая цилиндрическая антенна и ГУ, а также введена аппаратура предварительной обработки (АПО), причем АПО и ГУ выполнены многоканальными, а в состав бортовой части входят прибор обработки и пультовой прибор; в состав бортовой и погружаемой частей дополнительно включены оптико-электронные преобразователи, ОЭПБ и ОЭПП, соответственно, причем ОЭПБ размещен в приборе обработки, а ОЭПП размещен в АПО; цилиндрическая акустическая антенна состоит из двух независимых антенн - приемной и излучающей, выполненных в виде фазированных антенных решеток, причем приемная антенна выполнена с возможностью формирования статического веера характеристик направленности (ХН) в горизонтальной плоскости, а излучающая антенна выполнена ненаправленной в горизонтальной плоскости и с управляемой ХН в вертикальной плоскости; грузонесущий кабель выполнен многожильным, часть его жил выполнена токопроводящими, а часть представляет собой волоконно-оптические линии, при этом токопроводящие жилы кабеля использованы для подачи электропитания на ГУ и АПО; АПО двухсторонней связью через ОЭПП, волоконно-оптические линии кабеля и ОЭПБ соединена с прибором обработки, первый многоканальный информационный вход АПО соединен с выходами электроакустических преобразователей приемной антенны, информационный выход АПО соединен с информационным входом ГУ, выходы ГУ соединены с входами электроакустических преобразователей излучающей антенны, а прибор обработки двусторонней связью соединен с пультовым прибором.
2. Гидроакустическая станция по п. 1, отличающаяся тем, что погружаемая часть выполнена в виде цилиндрического герметичного контейнера, закрытого съемными крышками, внутри которого размещены ГУ, АПО, а электроакустические преобразователи приемной и излучающей антенн расположены на его стенках;
3. Гидроакустическая станция по п. 2, отличающаяся тем, что в состав погружаемой части введены блоки контроля положения (БКП) и датчика давления (ДД), размещенные в герметичном цилиндрическом контейнере, при этом второй и третий информационные входы АПО соединены с выходами БКП и ДД.
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ КОНТРОЛЯ ВНЕШНЕЙ ОБСТАНОВКИ | 2014 |
|
RU2573173C1 |
| Автоматический передатчик к телеграфным аппаратам | 1930 |
|
SU27715A1 |
| WO 2008093088 A2, 07.08.2008. | |||

