Изобретение относится к области робототехники, а именно к беспилотным летательным аппаратам (БЛА) и комплексам авианаблюдения, и может использоваться для дистанционного термозондирования, выявления утечек тепла, а так же для осуществления контроля и охраны периметров особо важных объектов.
Известен Привязной коптер (патент на изобретение Российской Федерации МПК В64С 27/08 RU №2018145055 С1, Бюл. №35 от 13.12.2019), содержащий каркас с размещенными на нем электродвигателями с автоматами перекоса винтов, системой управления с гироскопом и радиоэлектронной, гибкую тягу в виде силового, энергетического и информационного кабеля. При этом каркас снизу снабжен плоским чехлом, а сверху - сферическим чехлом, имеющим аэродинамический профиль, причем сферический чехол заполнен неэластичным пористым материалом. Обеспечивается упрощение технологии изготовления и уменьшение веса конструкции.
Названный аналог не позволяет осуществлять теплометрические исследования в малых пространствах ввиду невозможности оборудования летательного аппарата тепловизным комплексом без потери необходимой мобильности. Также аналогом является Мобильный робототехнический комплекс по патенту МКП B25J 5/00, RU №2364500 С2, Бюл. №23 от 20.08.2009. Владелец патента открытое акционерное общество «КОВРОВСКИЙ ЭЖТРОМЕХАНИЧЕСКИЙ ЗАВОД» (ОАО «КЭМЗ») (RU). Изобретение относится к робототехнике а именно к робототехническим комплексам предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах.
Мобильный робототехнический комплекс включает мобильный робот, пост дистанционного управления, бортовую телевизионную систему, которая включает отдельные видеоблоки. Мобильный робототехнический комплекс снабжен выносной системой видеонаблюдения. Мобильный робот дополнительной включает комплект дополнительного оборудования - раздвижную телескопическую штанку-удлинитель, с узом вертикального крепления ее в кормовой части транспортного средства мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, на другом конце.
Как следует из описания, названный аналог не позволяет осуществлять гибкое конфигурирование системы беспилотного летательного аппарата, что в свою очередь ведет к невозможности осуществления теплометрического процесса.
Также известен инфракрасный дрон по патенту Китая №202011209273.9 от 2020.11.03. Камеры снимают тепловые изображения зданий, 3D реконструкция существующих зданий. Таким образом, получаются трехмерная модель в градациях серого и ортофотоизображения. Ортофотоизображение соответствует функциональной взаимосвязи между температурой и уровнем выбросов. Используется FME, чтобы растянуть карту оттенков серого, чтобы получить новую карту цветов, затем новая цветовая карта устанавливается на синий канал уровня RGB. Записывается значение температуры в синюю полосу в процесс. Считываются цветовые 3D-модели облаков точек для получения информации о температуре. Этот метод является существующим. Испытание тепловых характеристик ограждающих конструкций обеспечивает всестороннее, быстрое, точные инструменты оценки, не только для ограждающих конструкций одного здания энергосберегающего обнаружения. Также подходит для ограждающих конструкций нескольких зданий в региональном масштабе. Этим обеспечивается структурный мониторинг производительности.
Недостатком данной системы является повышенная сложность, поскольку суммарное изображение получается в результате 3D текстурной модели состоящей из 743 фрагментов.
Наиболее близким по технической сущности является трехсредный мобильный аппарат «Этажерка» по патенту МКП B60F 5/02, RU №2706748 С1, от 20.08.2009.
Устройство относится к беспилотным летательным аппаратам, способным функционировать в воздухе, на суше, на поверхности водоема, в толще воды и на дне водоема. Трехсредный мобильный аппарат содержит амфибийный модуль в виде самоходного шасси с энергетической установкой и насосной станцией, а также с сухопутным и водоходным движениями, поплавковый модель над амфибийным модулем, устройство взаимосвязи поплавкового и амфибийного модулей и систему управления роботом. Аппарат дополнительно снабжен летательным модулем вертикального взлета-посадки вертолетного типа, расположенным в состыкованном состоянии над поплавковым модулем. Грузоподъемность летательного модуля свыше веса остальной части аппарата. Имеется устройство взаимосвязи летательного и поплавкового модулей. Оба упомянутых устройства взаимосвязи модулей выполнены с возможностью независимо друг от друга обратимой расстыковки в эксплуатационных условиях. Обеспечивается повышение технико-эксплуатационных характеристик аппарата за счет расширения его возможностей.
Недостатком такой конструкции является невозможность длительного функционирования без подзарядки аккумулятора, а также достаточно сложная и массогабаритная система стабилизации и слежения.
Изобретение направлено на обеспечение уменьшения массы и габаритов систем стабилизации и слежения.
Это достигается тем что мобильный робототехнический комплекс, содержащий беспилотный летательный аппарат с информационной системой и системой стабилизации, а также передвижной модуль с посадочной площадкой для беспилотного летательного аппарата, согласно изобретению активные элементы системы стабилизации и слежения установлены на передвижном модуле, а беспилотный летательный аппарат снабжен пассивными элементами системы стабилизации и слежения.
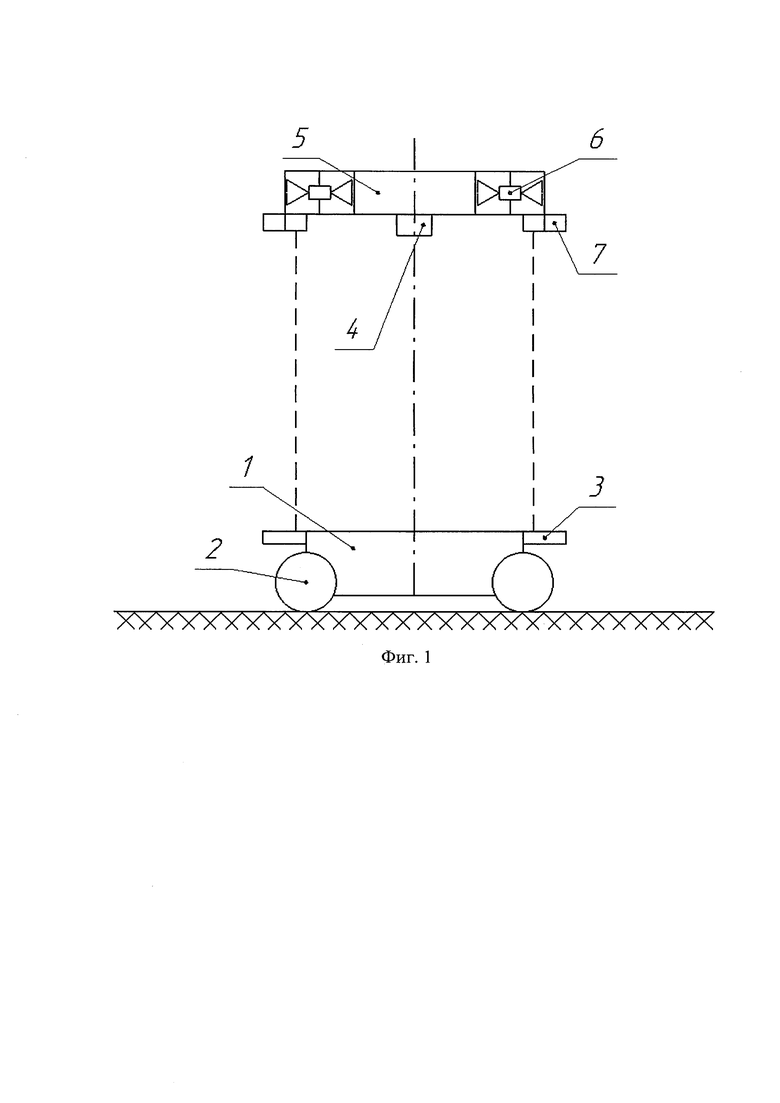
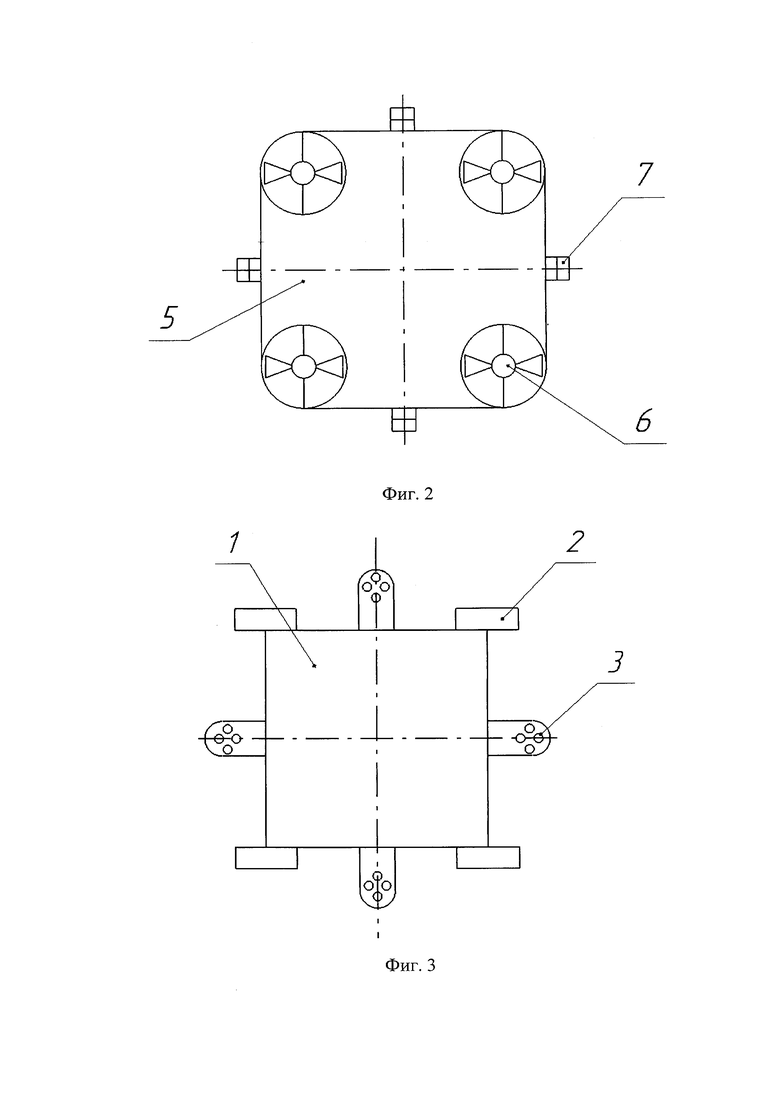
Сущность изобретения иллюстрируется чертежом, где на фиг. 1 схематично показан мобильный робототехнический комплекс, вид сбоку, на фиг. 2 показан беспилотный летательный аппарат, вид снизу, на фиг. 3 показан передвижной модуль с посадочной площадкой, вид сверху.
Мобильный робототехнический комплекс включает в себя: передвижной модуль 1 с движителями 2 и активными элементами систем стабилизации слежения 3. Беспилотный летательный аппарат содержит: блок видеокамер 4, установленных на платформе 5. Аппарат содержит: винтовые комплексы 6 и пассивные элементы систем стабилизации и слежения 7.
Мобильный робототехнический комплекс функционирует следующим образом. Комплекс доставляется к месту работы на каком либо транспортном средстве с последующей выкаткой из него передвижного модуля 1, летательный аппарат при этом установлен на платформе 5. Далее в соответствии с программой, заложенной в системе управления, аппарат поднимается на заданную высоту, которая пропорциональна пути излучения активных элементов 3 и приема отраженного сигнала активными элементами 3 в результате отражения энергетических лучей от пассивных элементов 7. Очевидно, что для стабилизации аппарата необходимо равенство времени отражения всех четырех энергетических лучей, которые позволяют стабилизировать аппарат. В дальнейшем передвижной модуль передвигается по заданной программой траектории, например по периметру охраняемого объекта, при этом происходит переход восходящего луча на какую либо ячейку пассивных элементов 7, что в свою очередь приводит к срабатыванию соответствующих приемников активных элементов 3. В результате летательный аппарат осуществляет слежение за подвижным модулем, и ведет его по заданной траектории. Блок видеокамер 4 при этом осуществляет мониторинг окружающей местности, и при возникновении чрезвычайной ситуации дает команду или на передвижной модуль, или непосредственно на пульт охраны. Таким образом имеется 2 комплекта пассивных элементов: одни пассивные элементы установлены на летательном аппарате, и переход луча от этих элементов к рядом с ними расположенными инициирует передвижение аппарата которое заключается в том, что он следит за перемещением передвижного модуля, второй комплект пассивных элементов установлен рядом с активными элементами и служит для измерения высоты подъема летательного аппарата и ее стабилизации по времени прямого и обратного хода лучей. Если система стабилизации имеется на самом летательном аппарате, то данный канал может отсутствовать, тогда могут отсутствовать и пассивные элементы на передвижном модуле
Технико-экономическим преимуществом данного комплекса является упрощение систем стабилизации и слежения, а также уменьшение их массы за счет того, что в качестве пассивных элементов 7 могут быть использованы простейшие отражатели. В качестве активных элементов предпочтительно использование лазеров инфракрасного диапазона.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робототехнический комплекс | 2023 |
|
RU2808484C1 |
| Трёхсредный мобильный аппарат "Этажерка" | 2019 |
|
RU2706748C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Робот мобильный | 2024 |
|
RU2834078C1 |
| Колесо мобильного робота | 2024 |
|
RU2835523C1 |
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| Робототехнический комплекс и способ его эксплуатации на высотных объектах, относящихся к электроэнергетике и радиосвязи | 2019 |
|
RU2715682C1 |
| Способ комплексного применения роботизированных средств огневого поражения и радиоэлектронного подавления системы активной защиты бронетехники | 2020 |
|
RU2746772C1 |
Изобретение относится к комплексам авианаблюдения и может использоваться для дистанционного термозондирования, выявления утечек тепла, а также для осуществления контроля и охраны периметров особо важных объектов. Мобильный робототехнический комплекс содержит беспилотный летательный аппарат с информационной системой и системой стабилизации, а также передвижной модуль с посадочной площадкой для беспилотного летательного аппарата. Активные элементы системы стабилизации и слежения, выполненные в виде лазеров инфракрасного диапазона, установлены на передвижном модуле. Беспилотный летательный аппарат снабжен пассивными элементами системы стабилизации и слежения. В качестве пассивных элементов могут быть использованы простейшие отражатели. Обеспечивается упрощение систем стабилизации и слежения, снижение их массы. 3 ил.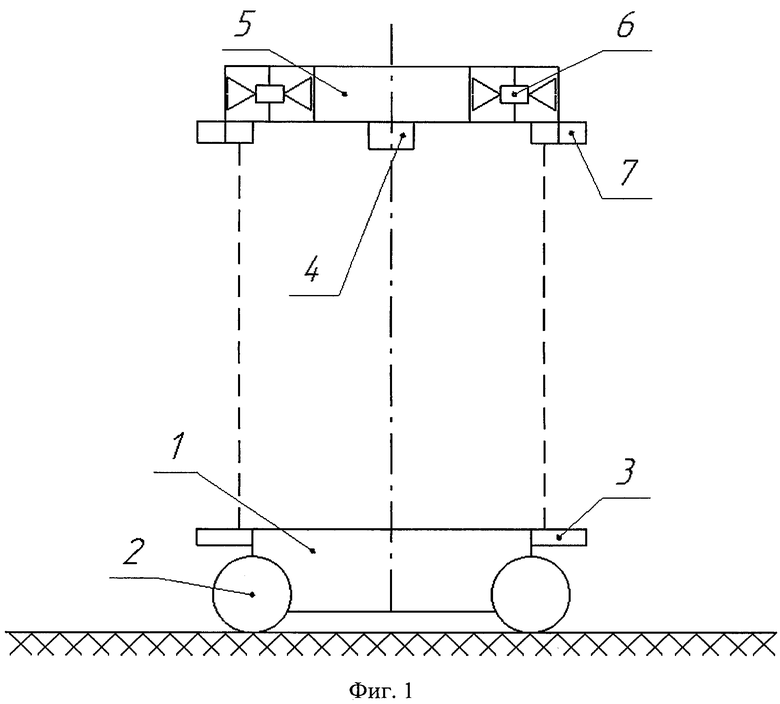
Мобильный робототехнический комплекс, содержащий беспилотный летательный аппарат (БПЛА) с информационной системой и системой стабилизации, а также передвижной модуль с посадочной площадкой для беспилотного летательного аппарата, отличающийся тем, что активные элементы систем стабилизации БПЛА и слежения БПЛА за передвижным модулем - лазеры инфракрасного диапазона - установлены на передвижном модуле, а беспилотный летательный аппарат снабжен пассивными элементами систем стабилизации БПЛА и слежения БПЛА за передвижным модулем - отражателями.
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| ТРАНСПОРТНАЯ СИСТЕМА (ВАРИАНТЫ) | 2016 |
|
RU2633667C2 |
| Робототехнический комплекс и способ его эксплуатации на высотных объектах, относящихся к электроэнергетике и радиосвязи | 2019 |
|
RU2715682C1 |
| СПОСОБ КООРДИНАЦИИ НАЗЕМНЫХ ПОДВИЖНЫХ АВТОМАТИЗИРОВАННЫХ УСТРОЙСТВ С ПОМОЩЬЮ ЕДИНОЙ ЦЕНТРАЛИЗОВАННОЙ УПРАВЛЯЮЩЕЙ СИСТЕМЫ | 2015 |
|
RU2691788C2 |
| EP 3292374 B1, 03.04.2019 | |||
| US 20220305431 A1, 29.09.2022. | |||

