Изобретение относится к строительно-дорожным машинам, в частности к системам управления рабочим оборудованием погрузчика.
Цель изобретения - повышение производительности погрузчика, путем автоматизации процесса возврата ков-1, ша после его разгрузки.
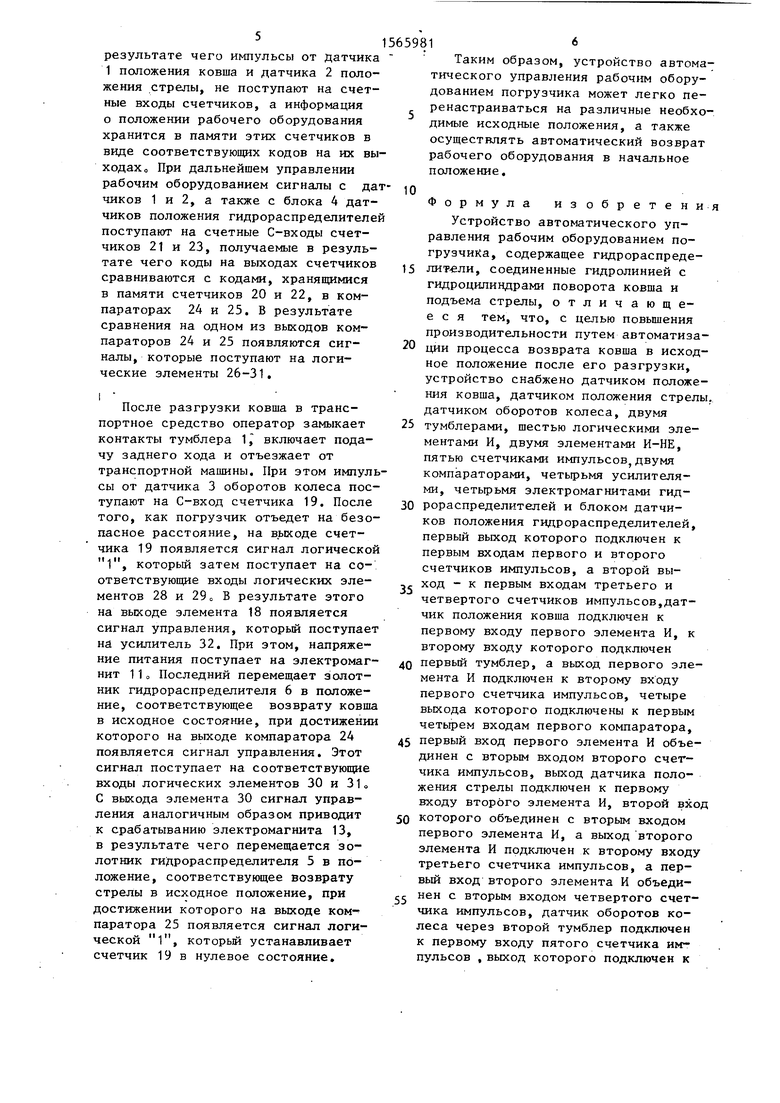
На фиг.1 изображена принципиаль- ная схема устройства автоматического управления рабочим оборудованием погрузчика; на фиг.2 - принципиальная схема блока датчиков положения гидрораспределителей о
Устройство автоматического управления рабочим оборудованием погрузчика содержит датчик 1 положения ковша, датчик 2 положения стрелы, датчик 3 оборотов колеса, блок 4 датчиков положения гидрораспределителя, содержащий гидрораспределители 5 и 6, концевые выключатели 7-10 и, установленные для управления гидрорас пределителями 5 и 6 электромагниты 11-14, а выходы последовательно соединенных концевых выключателей 7-10 являются выходами блока 4, тумблеры 15 и 16, причем тумблер 15 подключен к входам соответственно логических элементов И 17 и 18, счетчики 19-23 импульсов, выходы которых подключены к компараторам 24 и 25, подключенным через логические элементы И-НЕ 26 и
27 к логическим элементам И 28-31, выходы которых соответственно подключены к усилителям 32-35, соединенным с электромагнитами 11-14 гидрораспределителей 5 и 6 блока 4. Выходы гидрораспределителей 5 и 6 подключены к гидроцилиндрам 36-38 рабочего оборудования погрузчика.
Устройство работает следующим образом.
Перед началом набора грунта в ковш оператор устанавливает рабочее оборудование в необходимое исходное положение. При этом нормально разомкнутые контакты замкнуты и на С-вход счетчиков 20 и 21 поступают импульсы от датчика 1 положения ковша, а от датчика 2 положения стрелы - на С-входы счетчиков 22 и 23. При замыкании контактов концевых выключателей 8 и 9 на U-входы соответствующих счетчиков поступает высокий уровень напряжения, а следовательно, импульсы, поступающие на их счетные входы, суммируются. При замыкании контактов выключателей 7 и 8 на U-входы счетчиков поступает низкий уровень напряжения, это означает, что импульсы, поступающие на счетные входы счетчиков, вычитаются.
После установки- рабочего оборудования в исходное положение оператор размыкает контакты тумблера 15, в
результате чего импульсы от датчика 1 положения ковша и датчика 2 положения стрелы, не поступают на счетные входы счетчиков, а информация
0положении рабочего оборудования хранится в памяти этих счетчиков в виде соответствующих кодов на их выходах При дальнейшем управлении рабочим оборудованием сигналы с датчиков 1 и 2, а также с блока 4 датчиков положения гидрораспределителей поступают на счетные С-входы счетчиков 21 и 23, получаемые в результате чего коды на выходах счетчиков сравниваются с кодами, хранящимися
в памяти счетчиков 20 и 22, в компараторах 24 и 25. В результате сравнения на одном из выходов компараторов 24 и 25 появляются сигналы, которые поступают на логические элементы 26-31.
1
После разгрузки ковша в транспортное средство оператор замыкает контакты тумблера 1I включает подачу заднего хода и отъезжает от транспортной машины. При этом импульсы от датчика 3 оборотов колеса поступают на С-вход счетчика 19. После того, как погрузчик отъедет на безопасное расстояние, на выходе счетчика 19 появляется сигнал логической 1, который затем поступает на соответствующие входы логических элементов 28 и 29 о В результате этого на выходе элемента 18 появляется сигнал управления, который поступает на усилитель 32. При этом, напряжение питания поступает на электромагнит 1 1 , Последний перемещает золотник гидрораспределителя 6 в положение, соответствующее возврату ковша в исходное состояние, при достижении которого на выходе компаратора 24 появляется сигнал управления. Этот сигнал поступает на соответствующие входы логических элементов 30 и 310 С выхода элемента 30 сигнал управления аналогичным образом приводит к срабатыванию электромагнита 13, в результате чего перемещается золотник гидрораспределителя 5 в положение, соответствующее возврату стрелы в исходное положение, при достижении которого на выходе компаратора 25 появляется сигнал логической 1, которьй устанавливает счетчик 19 в нулевое состояние.
Таким образом, устройство автоматического управления рабочим оборудованием погрузчика может легко перенастраиваться на различные необходимые исходные положения, а также осуществлять автоматический возврат рабочего оборудования в начальное положение.
5
5
0
Ф
0
0
ормула изобретени
Устройство автоматического управления рабочим оборудованием погрузчика, содержащее гидрораспреде- лит«ли, соединенные гидролинией с гидроцилиндрами поворота ковша и подъема стрелы, отличающееся тем, что, с целью повышения производительности путем автоматизации процесса возврата ковша в исходное положение после его разгрузки, устройство снабжено датчиком положения ковша, датчиком положения стрелы, датчиком оборотов колеса, двумя
5 тумблерами, шестью логическими элементами И, двумя элементами И-НЕ, пятью счетчиками импульсов, двумя компараторами, четырьмя усилителями, четырьмя электромагнитами гидрораспределителей и блоком датчиков положения гидрораспределителей, первый выход которого подключен к первым входам первого и второго счетчиков импульсов, а второй выход - к первым входам третьего и четвертого счетчиков импульсов,датчик положения ковша подключен к первому входу первого элемента И, к второму входу которого подключен
0 первый тумблер, а выход первого элемента И подключен к второму входу первого счетчика импульсов, четыре выхода которого подключены к первым четырем входам первого компаратора,
5 первый вход первого элемента И объединен с вторым входом второго счетчика импульсов, выход датчика положения стрелы подключен к первому входу второго элемента И, второй вход
0 которого объединен с вторым входом первого элемента И, а выход второго элемента И подключен к второму входу третьего счетчика импульсов, а первый вход второго элемента И объединен с вторым входом четвертого счетчика импульсов, датчик оборотов колеса через второй тумблер подключен к первому входу пятого счетчика импульсов , выход которого подключен к
я
5
первым входам третьего и четвертого элементов И , выходы которых подключены соответственно через первый и второй усилители к первому и второму электромагнитам гидрораспределителей, а выходы второго счетчика импульсов подключены соответственно к остальным четырем входам первого компаратора, первый выход которого подключен к второму входу третьего элемента И -, второй выход первого компаратора Подключен к входу первого элемента И-НЕ и к первым вхо- д$м пятого и шестого элементов И, а третий выход первого компаратора подключен к второму входу четвертого элемента И, выход первого элемента И-НЕ подключен к третьим входам третьего и четвертого элементов И, а выходы третьего счетчика
импульсов соединены соответственно с первыми четырьмя входами второго компаратора, а выходы четвертого 5 счетчика импульсов соединены соответственно с оставшимися четырьмя входами второго компаратора.первый выход которого подключен к второму входу пятого элемента И, второй вы- 0 ход второго компаратора подключен к второму входу пятого счетчика импульсов и к входу второго элемента И-НЕ, а третий выход второго компаратора подключен к второму входу 5 шестого элемента И , причем выход второго элемента Й-НЕ подключен к третьим входам пятого и шестого элементов И, выходы которых через третий и четвертый усилители подключе- 0 ны соответственно к третьему и чет-- вертому электромагнитам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления процессом разгрузки ковша скрепера | 1987 |
|
SU1444481A1 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1990 |
|
SU1810443A1 |
| СПОСОБ НАБОРА СЫПУЧИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2009295C1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1992 |
|
RU2092658C1 |
| Способ управления процессом черпания фронтального погрузчика | 1985 |
|
SU1305273A1 |
| Система управления рабочим процессом погрузчика | 1985 |
|
SU1355679A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
| Гидропривод рабочего оборудования погрузчика | 1989 |
|
SU1666666A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Гидромеханический привод погрузчика | 1986 |
|
SU1467144A1 |
Изобретение относится к строительно-дорожным машинам и может быть использовано для управления рабочим оборудованием погрузчика. Цель изобретения - повышение произв-сти погрузчика путем автоматизации процесса возврата ковша в исходное положение после его разгрузки. Устройство содержит датчики 1-3 соответственно положения ковша, стрелы и оборотов колеса, блок 4 датчиков положения гидрораспределителя счетчика 19-23 импульсов подключенные через компараторы 24 и 25 и логические элементы И-НЕ 26, 27 и И 28-31 к усилителям 32-35, соединенным с электромагнитами 11-14 гидрораспределителей. При ручном управлении импульсы от датчика 1 и 2 поступают на входы счетчиков 20-23. После установки рабочего оборудования в исходное положение информация о его положении хранится в памяти этих счетчиков. При дальнейшем управлении оборудованием сигналы с датчиков 1 и 2, а также с блока 4 поступают на счетчики 21 и 23. Их выходные сигналы сравниваются с сигналами, хранящимися в счетчиках 20 и 22, в компараторах 24, 25. В результате сравнения на выходах компараторов 24 и 25 появляются сигналы, которые поступают на логические элементы 27-31. После загрузки ковша оператор включает подачу заднего хода и отъезжает от транспортной машины. При этом импульсы датчика 3 поступают на счетчик 19. При этом через усилители 32-35 включаются электромагниты 11-14 гидрораспределителей, что приводит к возврату ковша в исходное положение. При достижении которого на выходе компаратора 24 появляется сигнал управления. Этот сигнал поступает на входы логических элементов 30 и 31. Срабатывает электромагнит 13 и золотник гидрораспределителя 5 перемещается в положение, соответствующее возврату стрелы в исходное положение. Таким образом устройство может легко перенастраиваться на различные исходные положения. 2 ил.
Редактор М. Вланар
Фиг. 2
Составитель Л. Виноградов
Техред Л. Сердюкова Корректор м. Ножо
Заказ 12U3
Тираж 538
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/S
Подписное
| Васильев А.А | |||
| Дорожные машины | |||
| М.: Машиностроение, 1979, с | |||
| Вагонный распределитель для воздушных тормозов | 1921 |
|
SU192A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство управления приводами ковша экскаватора | 1984 |
|
SU1249475A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
