Изобретение относится к машиностроению, а именно подшипниковой промышленности и предназначено для оценки качества подшипников по величине момента трения.
Качество подшипников в значительной степени определяет качество машин и механизмов. Оценку качества подшипников ведут путем проведения испытаний - исследовательских, сдаточных у изготовителя, приемных у потребителя.
При испытаниях применяют специализированные машины трения (патент RU 2336917, опубл. 10.09.2009; патент RU 2369852, опубл. 10.10.2009). Задают определенные условия испытаний (патент RU 2504701, опубл. 20.01.2014). Для оценки качества подшипников измеряют различные параметры, например, протекающий через подшипник электрический ток (патент RU 2529644, опубл. 27.09.2014). Более информативны способы, использующие вибрационные эффекты (патент RU 2407999, опубл. 27.12.2010). Однако известные способы и их практическая реализация предполагают значительные аппаратурные затраты и трудоемкость выявления искомого параметра.
В качестве прототипа принят способ обнаружения и автоматической идентификации повреждения подшипников качения по патенту RU 2470280 МПК G01M 13/04, опубл. 20.12.2012. В соответствии с этим способом вибрации работающего подшипника, измеренные в виде временной диаграммы аналогового сигнала преобразуют в цифровые данные. Далее выполняется фильтрация первичного преобразования с использованием двоичного вектора, который определяют в процессе следующих операций: на предварительно отфильтрованной временной диаграмме обработанного сигнала выбирают два соседних исходных векторных интервала, один из которых является опорным интервалом, и сигналы, присутствующие в контрольном и опорном интервалах, подвергают многократной фильтрации, в результате которой, после каждой фильтрации, вычисляют отношения правдоподобия ударных импульсов, определяемые как отношение среднеквадратических значений фильтрованного сигнала, присутствующего в контрольном интервале, к среднеквадратическим значениям фильтрованного сигнала, присутствующего в опорном интервале, сравнивают вычисленные отношения правдоподобия с предварительно установленной пороговой величиной и оценивают вероятность появления ударного импульса в первом контрольном интервале, информацию о появлении ударного импульса в исследуемом контрольном интервале записывают как исходные элементы двоичного вектора, и затем определяют все остальные элементы двоичного вектора для всех последующих контрольных и опорных интервалов, которые выбирают интерактивно, со смещением в конкретном направлении, и упомянутые элементы двоичного вектора принимают значение 1 в области появления ударного импульса и 0 в области, в которой ударный импульс не появляется.
Рассматриваемому способу свойственны те же недостатки, что и аналогам. Кроме того наличие ударных явлений в подшипниках является их частным свойством. Любые дефекты проявляются в виде момента сопротивления вращению, т.е. момента трения. Момент трения в подшипнике является интегральным параметром его качества.
Технических результатом предлагаемого изобретения является снижение аппаратурных затрат и трудоемкости выявления искомого параметра.
Решаются задачи:
1. Разработка высокопроизводительного способа определения момента трения в подшипниках, дающего интегральную характеристику качества и предполагающего низкие аппаратурные затраты на его реализацию.
2. Разработка примера реализации предлагаемого способа определения момента трения в подшипниках качения.
3. Обоснование принимаемых технических решений.
Указанный результат достигается тем, что в соответствии с предлагаемым способом определения момента трения в подшипниках качения, при котором выявляют временную диаграмму аналогового сигнала работающего подшипника, преобразуют ее в цифровые данные, при этом временную диаграмму получают в виде функций выбега, выбирают на временной диаграмме два одинаковых сопряженных временных интервала, подсчитывают количество пройденных фазовых частей угла поворота на каждом временном интервале и определяют момент трения в подшипнике по формуле
 ,
,
где J - момент инерции вращающихся частей;
Δt - временной интервал;
ϕш - фазовая часть;
n1, n2 - количество фазовых частей соответственно в первом и втором временных интервалах.
Сущность предлагаемого способа определения момента трения заключается в следующем.
Для заданных условий эксперимента (радиальная и основная нагрузка, температура, внешние электрические, магнитные и радиационные поля и т.п.) обеспечивают вращение одного кольца подшипника относительно другого.
Рассмотрим свободное вращение, начиная с некоторого значения частоты вращения  . Этот процесс отражается функцией выбега
. Этот процесс отражается функцией выбега

где  - мгновенное значение частоты вращения.
- мгновенное значение частоты вращения.
Функция выбега (1) нелинейна, но поскольку вязкое трение в подшипнике мало по отношению к постоянному (Кулоновому) трению, то на ограниченном участке 1-2 (см. фиг. 1) эту функцию можно аппроксимировать отрезком прямой. Тогда момент трения Мтр в подшипнике определится

где W12 - расход энергии на трение;
ϕ12 - приращение фазы (угла поворота). Расход энергии на преодоление трения может быть найден через кинетическую энергию

где J - момент инерции вращающихся частей;
 - мгновенное значение частоты вращения соответственно в моменты времени t1 и t2.
- мгновенное значение частоты вращения соответственно в моменты времени t1 и t2.
Для нахождения мгновенных значений частот вращения  и
и  обратимся к дискретному методу. Заметим, что дискретный метод преобразования позволяет получить более высокую точность и надежность по сравнению с аналоговым методом. Для реализации дискретного метода разделим полный угол поворота (2π) на N равных фазовых частей (шагов) - ϕш
обратимся к дискретному методу. Заметим, что дискретный метод преобразования позволяет получить более высокую точность и надежность по сравнению с аналоговым методом. Для реализации дискретного метода разделим полный угол поворота (2π) на N равных фазовых частей (шагов) - ϕш

В окрестностях момента времени t1 выберем симметричный интервал Δt1 от момента времени t1H до момента времени t12. Аналогично для момента времени t2 - интервал Δt2 от момента t12 до t2К. Таким образом, границы интервалов Δt1 и Δt2 совмещены. Дополнительно примем условие

Поскольку угол поворота за время Δt равен количеству пройденных фазовых частей, то получим

где n1, n2 - количество фазовых частей соответственно за время Δt1 и Δt2.
С учетом формул (3), (6) получим

Приращение фазы на временном участке t1-2=Δt с учетом линейной аппроксимации и условия (5) составит

На основании формул (7), (8) формула (2) примет вид

Величина  является константой испытательной установки, реализующей предлагаемый способ определения момента трения в подшипниках.
является константой испытательной установки, реализующей предлагаемый способ определения момента трения в подшипниках.
Рассмотрим реализацию предлагаемого способа определения момента трения в подшипниках качения применительно к приемным испытаниям. В условиях массового производства изготовитель проводит полноразмерные испытания подшипников на выборке из партии. Для исключения попадания в ответственное изделие потребитель проверяет качество каждого подшипника по упрощенной методике проводя приемлемые испытания.
Устройство установки иллюстрируется чертежами:
фиг. 1 - расчетная схема;
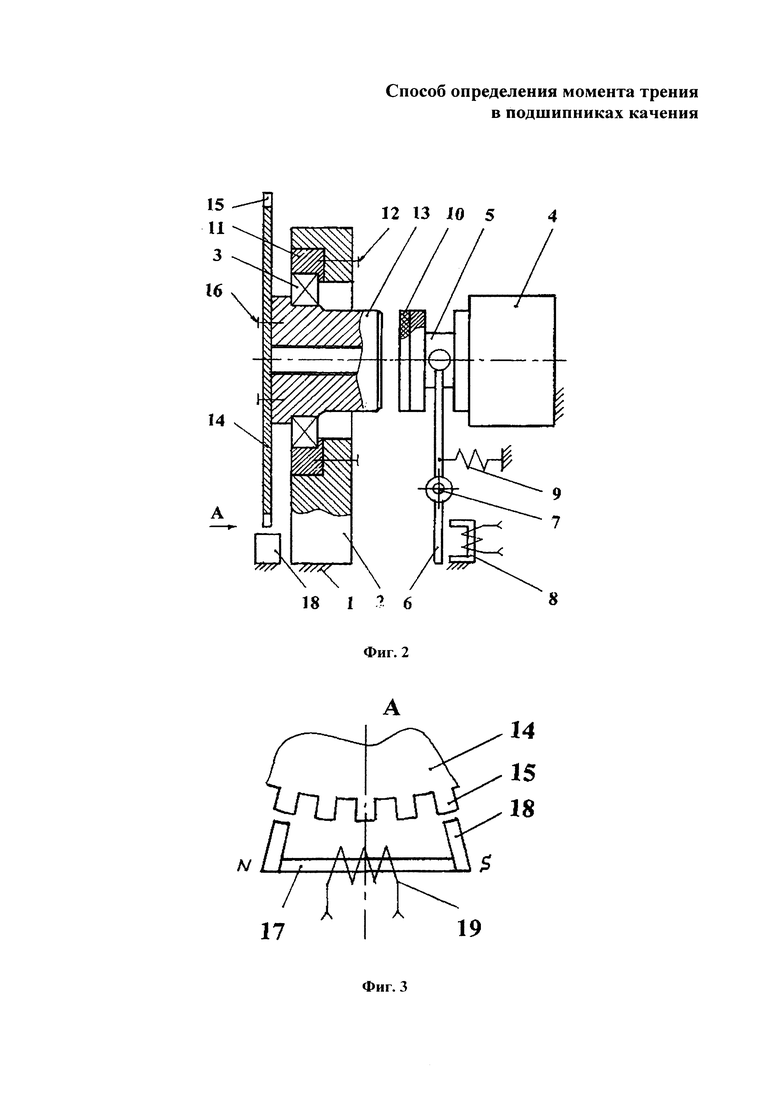
фиг. 2 - конструктивная схема электромеханической части;
фиг. 3 - вид А по фиг. 2;
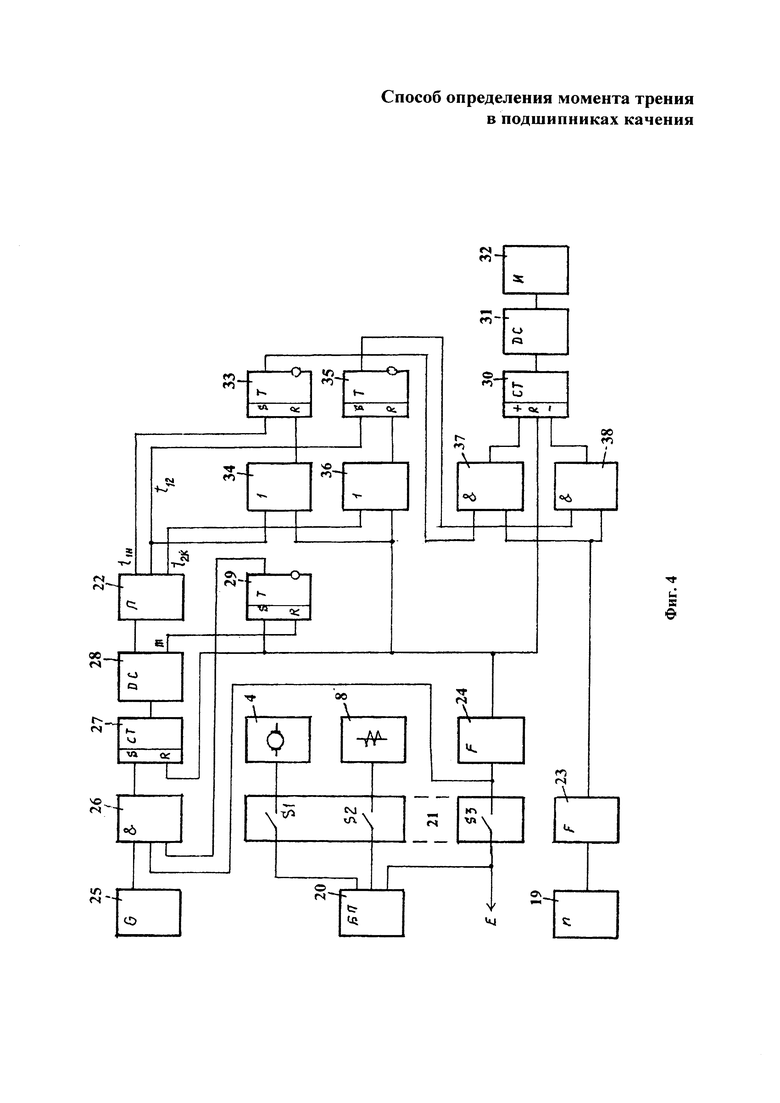
фиг. 4 - функциональная схема электронного блока.
Принятые обозначения
1. Корпус
2. Кронштейн подшипника
3. Испытываемый подшипник
4. Электродвигатель
5. Фрикционная муфта
6. Рычаг муфты
7. Ось рычага
8. Электромагнит
9. Пружина рычага
10. Фрикционная накладка
11. Втулка кронштейна
12. Винты втулки 11
13. Центральная втулка
14. Диск датчика фазы
15. Зубцовая зона диска 14
16. Винты диска 14
17. Постоянный магнит
18. Полюсные наконечники
19. Электрическая катушка
20. Блок питания
21. Тумблер управления
22. Переключатель режима (пакетный)
23. Формирователь сигнала датчика фазы
24. Формирователь сигнала сброса
25. Генератор опорной частоты
26. Конъюнктур цепи времени
27. Счетчик цепи времени
28. Дешифратор цепи времени
29. RS-триггер цепи времени
30. Реверсивный счетчик
31. Дешифратор реверсивного счетчика
32. Индикатор
33. RS-триггер временного интервала Δt1
34. Дизъюнктор триггера 33
35. RS-триггер временного интервала Δt2
36. Дизъюнктор триггера 35
37. Конъюнктур записи
38. Конъюнктур вычитания
В корпусе 1 электромеханической части закреплены кронштейн 2 испытываемого подшипника 3, электродвигатель 4, имеющий на консольной шпоночной части вала фрикционную муфту 5. В качестве электродвигателя целесообразно использовать электродвигатель постоянного тока с параллельным возбуждением. В этом случае его частота вращения пропорциональна питающему напряжению, что приводит к линейной шкале органа управления частотой вращения на блоке питания. Электродвигатель может снабжаться тахометром. Муфта имеет привод в составе поворотного рычага 6 с осью вращения 7 и электромагнита 8. Исходное положение рычага реализуется пружиной 9. Муфта на рабочей торцовой поверхности имеет фрикционную накладку 10 в форме кольца.
Испытываемый подшипник устанавливается по его наружному кольцу в кронштейне 2 посредством втулки 11, которая фиксируется винтами 12 с накатной головкой. Сопряжение наружного кольца подшипника со втулкой осуществляется с некоторым натягом, а сопряжение втулки с кронштейном - с зазором. Внутреннее кольцо испытываемого подшипника соединено с натягом с центральной втулкой 13, имеющей осевое резьбовое отверстие для взаимодействия со съемником. Правая торцовая поверхность центральной втулки (ориентация чертежа) предназначена для взаимодействия с муфтой, а левая - для крепления датчика фазы.
Датчик фазы представлен диском 14 из магнитопроводного материала с зубцовой зоной 15. Диск датчика фазы крепится на центральной втулке 13 посредством винтов 16 с накатной головкой. Преобразование фазового положения диска 14 в электрический сигнал осуществляется магнитоэлектрическим преобразователем, который составлен из постоянного магнита 17, двух полюсных наконечников 18 и электрической катушки 19.
Представленная конструкция электромеханической части позволяет за счет комплекта двух втулок (11, 13) простейшей формы перекрыть диапазон типоразмеров подшипников потребителя.
В зависимости от условий производства в качестве датчика фазы может быть использован волоконнооптический датчик (см. Шарыгин Л.Н., Каткова Л.Е. Проектирование конкурентноспособных технических изделий. - Владимир: изд-во Транзит-ИКС, 2017. ISBN 978-5-8311-1024-1. с. 346-355). Для такого датчика фазовая часть будет определяться диаметром световолокна.
Электронный блок предназначен для управления процессом испытаний и выявления искомого параметра по сигналам датчика фазы. Управляющими элементами являются:
- блок питания 20, обеспечивающий напряжение Е питания микросхем, напряжение питания электромагнита 8 и регулируемое напряжение питания электродвигателя 4. Блок питания содержит тумблер включения «Сеть»;
- тумблер управления 21 на два положения: положение «Режим» с контактами S1, S2 и положение «Измерение» с контактом S3;
- пакетный переключатель режима 22, который устанавливает номинальное значение частоты вращения 
В составе электронного блока имеются два формирователя:
- формирователь 23 переводит импульсы электрической катушки 19 датчика фазы в прямоугольную форму;
- формирователь 24, создающий короткий импульс по фронту включения напряжения Е контактом S3 - импульс сброса.
Цепь, задающая шкалу времени, представлена генераторам опорной частоты 25, трехвходовым конъюнктором 26, счетчиком импульсов 27 и дешифратором 28. Управляющим элементом цепи времени является триггер 29, который устанавливается в единичное состояние импульсом сброса с выхода формирователя 24. В положении тумблера управления «Режим» конъюнктор 26 пропускает импульсы генератора 25 на вход счетчика 27, соответственно, на выходе дешифратора 28 последовательно возбуждаются выходные шины. Переключателем 22 транслируются шины соответствующие моментам времени t1H, t12 и t2K. Импульс старшей шины m дешифратора переводит управляющий триггер 29 в нулевое состояние и конъюнктор 26 закрывает поступление импульсов генератора 25 на вход счетчика 27. Применение пакетного переключателя 22 обусловлено нелинейностью функции выбега  , значит, зависимостью момента трения от частоты вращения. Шкала пакетного переключателя градуируется в номинальных значениях частоты вращения ϕи, а подключение выходных шин дешифратора осуществляется с соблюдением условия (5).
, значит, зависимостью момента трения от частоты вращения. Шкала пакетного переключателя градуируется в номинальных значениях частоты вращения ϕи, а подключение выходных шин дешифратора осуществляется с соблюдением условия (5).
Для нахождения разности количества фазовых частей, прошедших за время Δt1 и Δt2, используется реверсивный счетчик 30, состояние которого переводится в десятичный код дешифратором 31 и отражается индикатором 32. Интервал времени Δt1 формируется триггером 33, который устанавливается в единичное состояние импульсом с выхода переключателя 22, соответствующим моменту времени t1H, а возврат в нулевое состояние - импульсом t12 через дизъюнктор 34. Аналогично, триггер 35 формирует временной интервал Δt2 импульсом установки t12 и импульсом сброса t2K через дизъюнктор 36. Триггер 33 открывает конъюнктор 37 записи реверсивного счетчика 30, а триггер 35 - конъюнктор 38 вычитания.
Работа установки для приемных испытаний подшипников. Пользователь монтирует испытываемый подшипник 3: запрессовывает подшипник по наружному кольцу во втулку 11 кронштейна; запрессовывает подшипник по внутреннему кольцу на центральную втулку 13; закрепляет полученную сборочную единицу винтами 12 в кронштейне 2. Далее производят измерение.
Задают условия испытаний. Регулятором напряжение питания электродвигателя 4 на блоке питания 20 устанавливают максимальное значение частоты вращения  . Пакетным переключателем 22 задают номинальное значение частоты вращения
. Пакетным переключателем 22 задают номинальное значение частоты вращения  .
.
Включают установку тумблером «Сеть» на блоке питания 20. Переводят тумблер управления 21 в положение «Режим». При этом контактом S1 включается электродвигатель, а контактом S2 - электромагнит 8, который рычагом 6 соединяет фрикционную муфту 5 с центральной втулкой 13. После набора частоты вращения  (определяют либо по тахометру, либо по времени - это единицы секунд) переводят тумблер управления 21 в положение «Измерение». Переброс тумблера управления обеспечит отключение электродвигателя и фрикционной муфты, а замыкание контакта S3 приведет к созданию формирователем 24 короткого импульса сброса. Этим импульсом все элементы памяти - триггеры 29, 33, 35 и счетчики 27, 30 - установятся в исходное положение. Одновременно контактом S3 открывается конъюктор 26, и импульсы генератора опорной частоты 25 начинают поступать на счетчик 27.
(определяют либо по тахометру, либо по времени - это единицы секунд) переводят тумблер управления 21 в положение «Измерение». Переброс тумблера управления обеспечит отключение электродвигателя и фрикционной муфты, а замыкание контакта S3 приведет к созданию формирователем 24 короткого импульса сброса. Этим импульсом все элементы памяти - триггеры 29, 33, 35 и счетчики 27, 30 - установятся в исходное положение. Одновременно контактом S3 открывается конъюктор 26, и импульсы генератора опорной частоты 25 начинают поступать на счетчик 27.
В процессе свободного вращения продолжается заполнение счетчика 27 цепи времени. При достижении момента времени t1H появляется импульс на соответствующей шине дешифратора 28, который через переключатель 22 по входу S устанавливает триггер 33 в единичное состояние. Переброс этого триггера приводит к открытию конъюктора 37, и импульсы датчика фазы через формирователь 23 начинают по суммирующему входу (+) заполнять реверсивный счетчик 30. Этот процесс закончится появлением на выходе переключателя импульса дешифратора 28, соответствующего моменту времени t12. Указанный импульс через дизъюнктор 34 возвратит триггер 33 в исходное состояние.
В этот же момент времени t12 срабатывает триггер 35, который открывает конъюктор 38, что приводит к поступлению импульсов датчика фазы на вычитающий вход (-) реверсивного счетчика 30. Вычитание заканчивается в момент времени t2K, когда сбрасывается через дизъюнктор 36 триггер 35. Таким образом, на реверсивном счетчике 30 будет записана разность количеств импульсов датчика фазы, прошедших за время Δt1 и Δt2. Эта величина будет отражена на индикаторе 32. Искомый параметр определяется по формуле (9). Работа электронного блока завершается появлением импульса на старшей шине m дешифратора 28 цепи времени. Этот импульс возвратит триггер 29 в исходное состояние, что приведет к закрытию конъюктора 26.
Заметим, что часть функций электронного блока и вычисление по формуле (9) могут быть возложены на компьютер.
Таким образом, предлагаемый способ определения момента трения в подшипниках качения позволяет оперативно при малых труозатратах выявить искомый параметр. Реализация предлагаемого способа предполагает достаточно простые конструктивные решения. Способ может быть применен для определения момента трения в подшипниках качения в процессе их экспериментальной отработки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и установка для определения вариативности передаточного отношения редуктора | 2016 |
|
RU2658138C1 |
| Установка для определения коэффициента трения | 2016 |
|
RU2659179C1 |
| Устройство для измерения горизонтальных ускорений | 2021 |
|
RU2838579C2 |
| Устройство для контроля скорости изменения частоты | 1979 |
|
SU885884A2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПЕРИОДИЧЕСКИХ ИМПУЛЬСНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ И ОЦЕНКИ ИХ ПЕРИОДА | 1990 |
|
RU2033617C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ТРЕХФАЗНОГО НАПРЯЖЕНИЯ В ВЫСОКОЧАСТОТНОЕ ОДНОФАЗНОЕ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2007 |
|
RU2337462C1 |
| Автосчислитель | 1979 |
|
SU836525A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| Цифровая система измерения глубинного положения морской пьезосейсмографной косы | 1976 |
|
SU894640A1 |

Изобретение относится к машиностроению, а именно к подшипниковой промышленности, и может быть использовано для приемных испытаний подшипников качения. По способу определения момента трения в подшипниках качения выявляют аналоговую функцию выбега, выбирают на этой функции два одинаковых сопряженных временных интервала, подсчитывают количество пройденных фазовых частей угла поворота на каждом временном интервале. Искомый параметр пропорционален разности количеств фазовых частей на первом и втором временных интервалах. Технический результат заключается в снижении аппаратурных затрат и трудоемкости выявления искомого параметра. 4 ил. 
Способ определения момента трения в подшипниках качения, при котором выявляют временную диаграмму аналогового сигнала работающего подшипника, преобразуют ее в цифровые данные, отличающийся тем, что временную диаграмму получают в виде функции выбега, выбирают на временной диаграмме два одинаковых сопряженных временных интервала, подсчитывают количество пройденных фазовых частей угла поворота на каждом временном интервале и определяют момент трения в подшипнике по формуле
 ,
,
где J - момент инерции вращающихся частей;
Δt - временной интервал;
ϕш - фазовая часть;
n1, n2 - количество фазовых частей соответственно в первом и втором временных интервалах.
| СПОСОБ ОБНАРУЖЕНИЯ И АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ ПОВРЕЖДЕНИЯ ПОДШИПНИКОВ КАЧЕНИЯ | 2008 |
|
RU2470280C2 |
| Способ оценки качества подшипников в сборе с ротором | 1988 |
|
SU1575079A1 |
| СПОСОБ ОЦЕНИВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДШИПНИКОВ | 2009 |
|
RU2407999C1 |
| Способ распределения металлографических структур в рабочих органах почвообрабатывающих орудий по зонам функционального назначения | 2022 |
|
RU2802032C1 |

