Область техники
Настоящее изобретение относится к способу обнаружения и автоматической идентификации повреждений подшипников качения, применяемому при диагностике подшипников качения на очень ранней стадии появления повреждений.
Уровень техники
Современные способы диагностики технического оборудования, обнаружения имеющихся отказов и повреждений, возникающих на ранней стадии применения оборудования или его отдельных частей, и точного определения мест отказов и повреждений имеют первостепенную важность, и чем скорее данную задачу можно выполнить, тем большее значение имеет способ. Диагностика состояния оборудования и, в частности, обнаружение и автоматическая идентификация дефектов во вращающихся электрических машинах и их частях использует способы, основанные на измерении электрических или механических сигналов, их обработке, а также анализе и интерпретации результатов измерений.
Применяемые сейчас способы контроля работающих подшипников состоят в сравнении данных, полученных измерением и цифровой обработкой результатов измерений, для подшипников, которые работают в надлежащих условиях и которым не угрожает никакой отказ. В большинстве случаев, упомянутое сравнение выполняется подготовленным для этого экспертом.
Способ, наиболее часто применяемый для раннего определения дефектов подшипников, заключается в исследовании ударных импульсов в сочетании с исследованием вибраций в контролируемых частях подшипника. При этом из измеренных данных для дальнейшего анализа выбирают импульсы таких форм, которые предполагают возможность присутствия дефекта. Компьютерные способы анализа данных позволяют обнаруживать отказы в ранней стадии и определять место их возникновения, их типы и степень повреждения.
Способ и устройство для проверки состояния подшипника качения известны из патента США 5477730. Способ состоит в обнаружении первичных сигналов вибраций, генерируемых подшипником, демодуляции упомянутых сигналов для выдачи сигналов после демодуляции, преобразовании выходных сигналов из аналоговых сигналов в цифровые выходные сигналы, фильтрации шумов из упомянутых сигналов посредством технологии цифровой фильтрации, выбранной из многих известных технологий, и выдачи цифровых сигналов в устройство вывода. В другом варианте изобретения вместо демодуляции первичных сигналов применяют полосовую фильтрацию в диапазоне от 2000 до 15000 Гц и сигналы после данной фильтрации подвергают вышеописанному преобразованию. В еще одном варианте изобретения первичные сигналы вибраций, генерируемые подшипником, преобразуют из аналоговой в цифровую форму, затем из сигналов отфильтровывают шумы с использованием технологии цифровой фильтрации, выбранной из многих известных технологий, что включает в себя операцию отделения шумовых сигналов от цифровых выходных сигналов, и тогда цифровые сигналы подают в устройство выводы.
Способ оценки состояния подшипниковых элементов известен из публикации патентной заявки WO 00/04361. Данный способ использует измерения вибраций подшипникового элемента посредством генерации аналогового сигнала ускорения, преобразования упомянутого сигнала в цифровые данные, сбора отсчетов цифрового сигнала для обнаружения его составляющих, порождаемых дефектом подшипника. Способ характеризуется тем, что влияние любых нежелательных детерминированных составляющих сигнала устраняется из цифрового сигнала ускорения посредством фильтрации для получения сигнала, состоящего, по существу, из белого шума, пропорционального общей чистоте микроструктуры рабочей поверхности подшипника и ударному импульсу. Выбирают следующие характеристические параметры сигнала, которые чувствительны к дефектам подшипника: крутые импульсы вибраций или ударные импульсы, удвоенную амплитуду, среднее значение, пропорциональное средней амплитуде без ударных импульсов, содержание пиков сигнала. Обнаружение узкополосных ударных импульсов через периодические интервалы выполняют известным способом, так называемой, автокорреляцией оценки огибающего сигнала.
Сущность изобретения
Сущность способа обнаружения и автоматической идентификации повреждения подшипников качения, в котором вибрации работающего подшипника, измеренные в форме временной диаграммы аналогового сигнала волнового процесса, преобразуют в цифровые данные и предварительно фильтруют известным способом, состоит в том, что обнаружение ударных импульсов выполняют с использованием двоичного вектора p, который определяют в процессе следующих операций:
- на предварительно отфильтрованной временной диаграмме обработанного сигнала волнового процесса выбирают два исходных соседних векторных интервала, один из которых является опорным интервалом, а другой является контрольным интервалом, и сигналы, присутствующие в контрольном и опорном интервалах, подвергают многократной фильтрации, в результате которой после каждой фильтрации вычисляют отношения правдоподобия ударных импульсов, определяемые как отношение среднеквадратических значений фильтрованного сигнала, присутствующего в контрольном интервале, к среднеквадратическим значениям фильтрованного сигнала, присутствующего в опорном интервале,
- сравнивают вычисленные отношения правдоподобия с предварительно установленной пороговой величиной и оценивают вероятность появления ударного импульса в первом контрольном интервале,
- информацию о появлении ударного импульса в исследуемом контрольном интервале записывают как исходные элементы двоичного вектора p, и затем
- определяют все остальные элементы двоичного вектора p для всех последующих контрольных и опорных интервалов, которые выбирают итеративно со смещением в конкретном направлении, и упомянутые элементы двоичного вектора p принимают значения 1 в области появления ударного импульса и 0 в области, в которой ударный импульс не появляется.
Предпочтительно среднеквадратическое значение сигнала в исследуемом контрольном интервале, подвергнутого L-той фильтрации, τt[L], определяют на основании следующей зависимости:
 ,
,
а среднеквадратическое значение сигнала в исследуемом опорном интервале, подвергнутого L-той фильтрации, τ r[L], определяют на основании следующей зависимости:
 ,
,
где:
L - натуральное число в диапазоне 1 … NS и означает число фильтров;
Kt - длина исследуемого контрольного интервала;
Kr - длина опорного интервала;
kt, kr - последовательные натуральные числа от 1 до Kt или до Kr;
 - вектор, представляющий исследуемый контрольный интервал сигнала, подвергнутого L-той фильтрации;
- вектор, представляющий исследуемый контрольный интервал сигнала, подвергнутого L-той фильтрации;
 - вектор, представляющий исследуемый опорный интервал сигнала, подвергнутого L-той фильтрации.
- вектор, представляющий исследуемый опорный интервал сигнала, подвергнутого L-той фильтрации.
Предпочтительно среднеквадратическое значение сигнала в исследуемом опорном интервале τ r[L] определяют с использованием L-той фильтрации, которая является адаптивной фильтрацией, с использованием сингулярной декомпозиции (SVD) автоковариационной матрицы C r в соответствии со следующей зависимостью:
Cr=V∑rUT,
где матрица ∑r является диагональной матрицей, диагональные элементы которой являются ненулевыми и неотрицательными и означают среднеквадратические значения τ r[L]:
 ,
,
и матрицы V и U являются ортогональными матрицами, и при этом автоковариационная матрица C r имеет следующую форму:
 ,
,
в которой:
 ,
,
где:
x r[k r] - элементы опорного интервала;
k r - последовательные натуральные числа от 1 до Kr;
i r - последовательные натуральные числа от 1 до L;
K r - длина опорного интервала;
L - число адаптивных фильтров.
Предпочтительно среднеквадратическое значение сигнала в исследуемом контрольном интервале τ t[L] определяют с использованием L-той фильтрации, которая является адаптивной фильтрацией, на основании следующей зависимости:
 ,
,
где  означает элементы матрицы Zt, представленной в следующей форме:
означает элементы матрицы Zt, представленной в следующей форме:
 ,
,
и вычисляемой в соответствии со следующей зависимостью:
Zt=XtU,
где матрица X t определяется следующим образом:
 ,
,
и матрица U является ортогональной матрицей, элементы которой являются коэффициентами адаптивного фильтра, при этом:
Kt - длина исследуемого контрольного интервала;
x t[k t] - элементы контрольного интервала;
k t - последовательные натуральные числа от 1 до Kt;
Nt=Kt-L;
L - число адаптивных фильтров.
Предпочтительно многократную фильтрацию сигналов в контрольном и опорном интервалах выполняют с использованием полосового фильтра.
Предпочтительно длина контрольного интервала составляет 15% от длины опорного интервала.
Предпочтительно, идентификация дефекта в подшипнике или подшипниках выполняется автоматически для двоичного вектора p, определяемого для всех исследуемых контрольных и опорных интервалов временной диаграммы X обработанных сигналов волнового процесса и набора известных частот дефектов исследуемого подшипника или подшипников, Ff=[f f1, f f2, …, f fK], с помощью следующих операций:
- для каждой последовательной известной частоты ffK дефекта из набора Ft исследуемого подшипника определяют контрольную частоту  , которая принадлежит к окрестности Pg известной частоты ffK дефекта, где Pg является конфигурационным параметром, означающим поисковый частотный диапазон, связанный с известной частотой дефекта, и затем с использованием известных математических принципов максимального правдоподобия для каждой контрольной частоты ν
jK определяют функцию J максимального правдоподобия во временной области с использованием двоичного вектора p,
, которая принадлежит к окрестности Pg известной частоты ffK дефекта, где Pg является конфигурационным параметром, означающим поисковый частотный диапазон, связанный с известной частотой дефекта, и затем с использованием известных математических принципов максимального правдоподобия для каждой контрольной частоты ν
jK определяют функцию J максимального правдоподобия во временной области с использованием двоичного вектора p,
- затем проверяют, для какой контрольной частоты ν jK функция J максимального правдоподобия достигает максимального значения JA,
- вычисляют отношение FA максимального значения JA к уровню nA шумов и результат сравнивают с предварительно установленным пороговым параметром SA:
- если отношение FA больше, чем предварительно установленный пороговый параметр SA, то информация об исследуемом дефекте подшипника с конкретной частотой, которая принадлежит набору Ft и соответствует контрольной частоте ν jK, генерируется автоматически,
- если отношение FA меньше, чем или равно предварительно установленному пороговому параметру SA, то принимается, что ни один из ударных импульсов, присутствующих в двоичном векторе p, не соответствует ни одной из известных частот ffK дефектов исследуемых подшипников, и информация, что ни один конкретный дефект не проявился в исследуемом подшипнике или подшипниках, генерируется автоматически, где уровень (nA) шумов вычисляется с использованием максимальных значений (J) функции.
Предпочтительно контрольную частоту ν jK, для которой функция максимального правдоподобия, вычисленная для двоичного вектора p во временной области, достигает максимального значения JA, определяют максимизацией суммы квадратов амплитуд A k гармоник в соответствии со следующей зависимостью:
где: N h означает предварительно установленное число исследуемых гармоник,
Ak означает амплитуду гармоники, найденную во временной области с использованием двоичного вектора p, представленного в форме синусоидальной модели.
Предпочтительно значения амплитуд Ak гармоник определяют во временной области с использованием двоичного вектора p, представленного в форме синусоидальной модели.
Двоичный вектор p представляют в виде суммы синусоидальной модели и вектора шума:
 ,
,
который можно также представить в следующей матричной форме:
p=Bθ+e
где:
ϕ k - фаза,
ω k=2πνk/f s, k=1,2…N h, - угловая скорость, соответствующая контрольной частоте (ν jK), и k=1,2…N h;
f s - частота взятия отсчетов для аналого-цифровой обработки измеренного аналогового сигнала;
e=[ε[n]]T - вектор шума;
n - натуральное число от 1 до N-1;
N - число элементов в двоичном векторе (p);
B - матрица известных постоянных параметров, представляемая в следующей форме:

θ - вектор с неизвестными параметрами, представленный в следующей форме:
θ=[A 1cos(ϕ 1),A1sin(ϕ 1),A2cos(ϕ 2),A2sin(ϕ 2),…,A Nhcos(ϕ Nh),ANhsin(ϕ Nh)],
который является оценкой по методу наименьших квадратов для зависимости:
θ=(B T B) -1 B Tp,
где p является двоичным вектором в следующей форме:
p=[p[0],p[1],…,p[N-1]]T.
Предпочтительно уровень nA шумов вычисляют взятием медианы максимальных значений J функции, найденных в окрестности исследуемой частоты ffK дефектов из набора Ff.
Предпочтительно уровень nA шумов вычисляют взятием среднего значения из максимальных значений J функции, найденных в окрестности исследуемой частоты ffK дефектов из набора Ff.
В сравнении с известными способами обнаружения и автоматической идентификации дефектов в подшипниках качения изобретательское решение обеспечивает возможность обнаружения дефектов на очень ранней стадии их возникновения. Измерительный сигнал обрабатывается так, что из него удаляются составляющие сигнала, связанные с неударными импульсами, посредством адаптивной фильтрации в сочетании с вычислением отношения правдоподобия ударного импульса при конкретных контрольных и опорных интервалах. Кроме того, обнаружение каждого потенциального ударного импульса выполняют во временной области по отдельности, по одному за раз, в противоположность другим методам, в которых обнаружение ударных импульсов основано на анализе демодулированного сигнала в частотной области. Следовательно, чувствительность изобретательского решения повышается. В результате алгоритма обнаружения ударного импульса создается двоичный вектор p, который содержит составляющие сигнала, относящиеся только к ударному импульсу. Для идентификации отказа подшипника двоичный вектор p обрабатывается во временной области по высокоразрешающему способу максимального правдоподобия. В процессе идентификации отказа совершенно не используют Фурье-преобразования.
Краткое описание чертежей
Способ в соответствии с настоящим изобретением раскрыт ниже со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает блок-схему устройства, применяемого для обнаружения и автоматической идентификации дефектов в подшипниках качения;
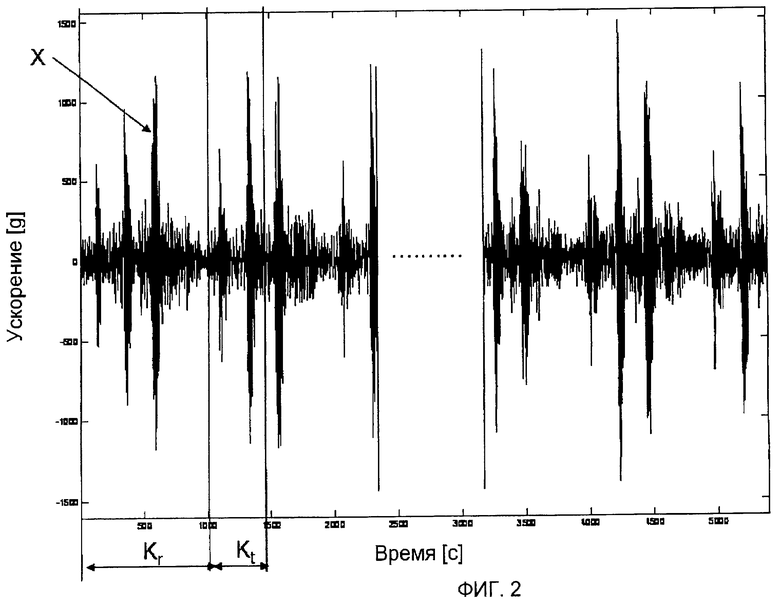
фиг. 2 - временную диаграмму обработанного сигнала X волнового процесса с обозначенными контрольным и опорным интервалами;
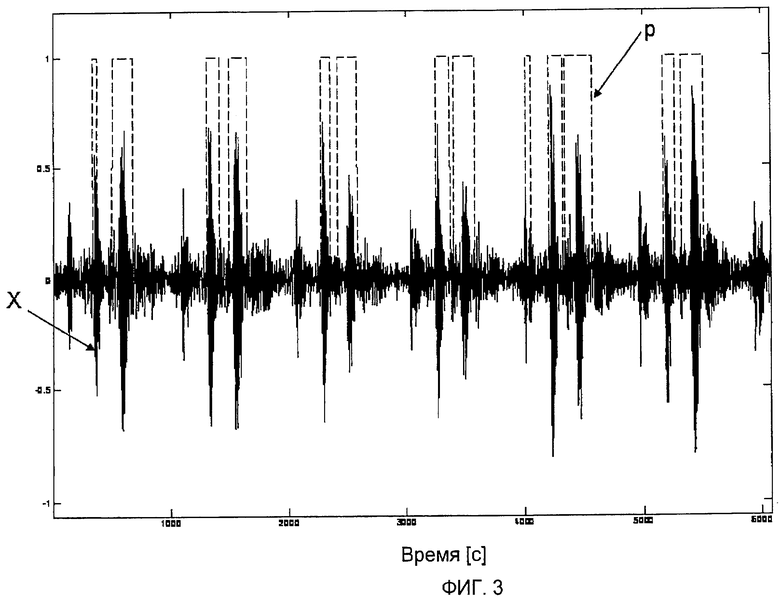
фиг. 3 - диаграмму с появлением ударных импульсов в двоичной форме вектора p на фоне с временной диаграммой обработанного сигнала X волнового процесса;
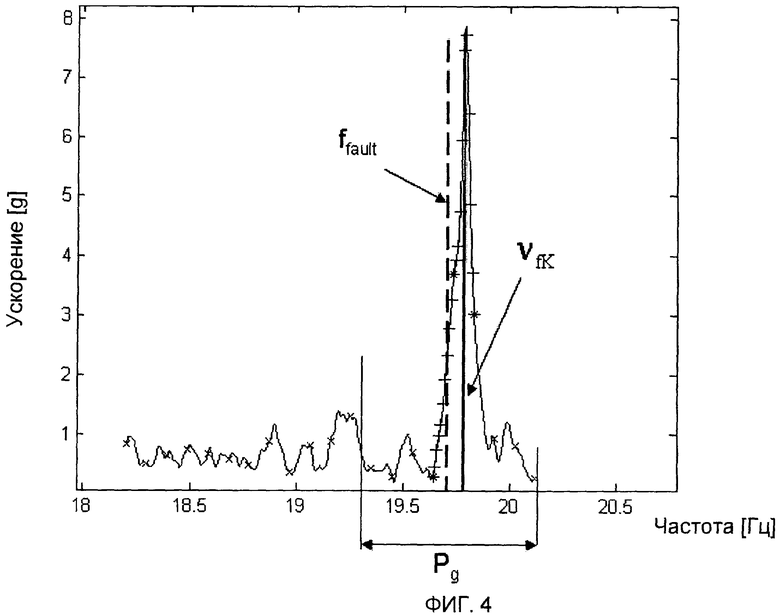
фиг. 4 - фрагмент частотного спектра, в котором указана частота ffault появившегося дефекта вместе с контрольной частотой ν jK;
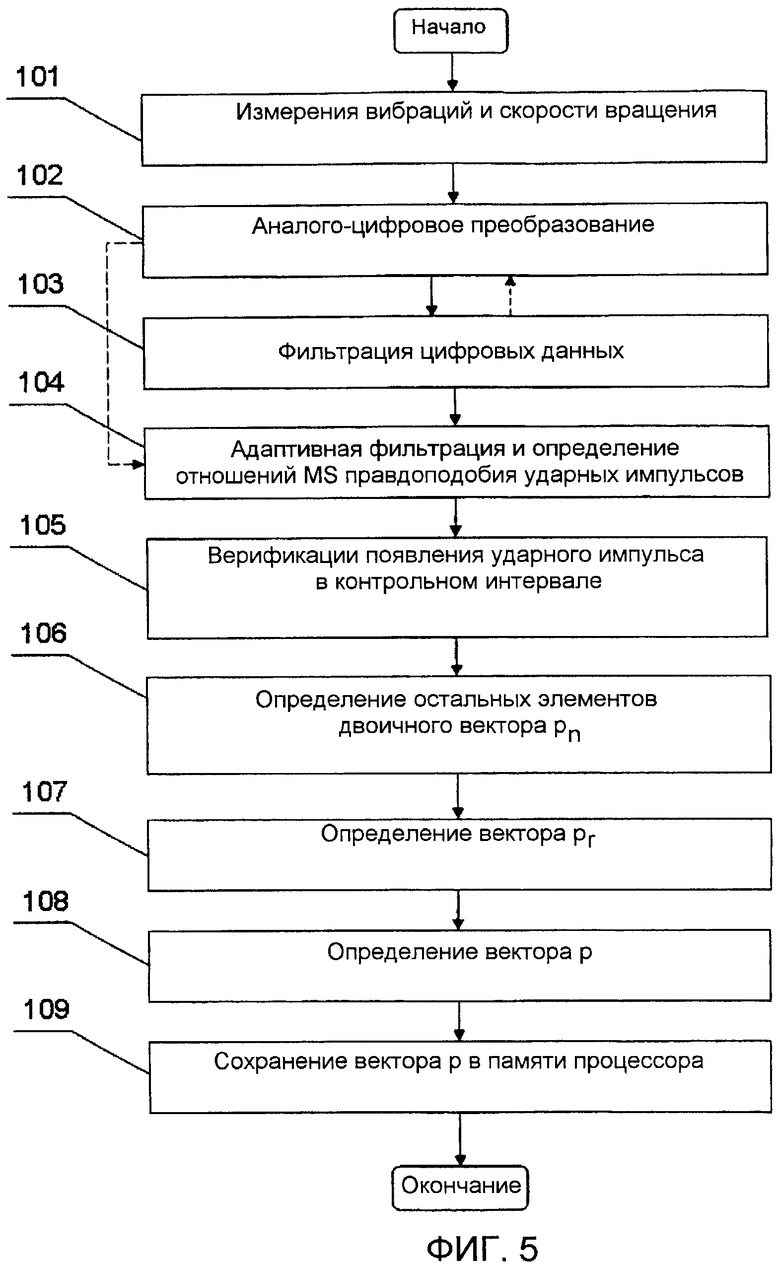
фиг. 5 - диаграмму операций, выполняемых при определении ударных импульсов в соответствии с настоящим способом;
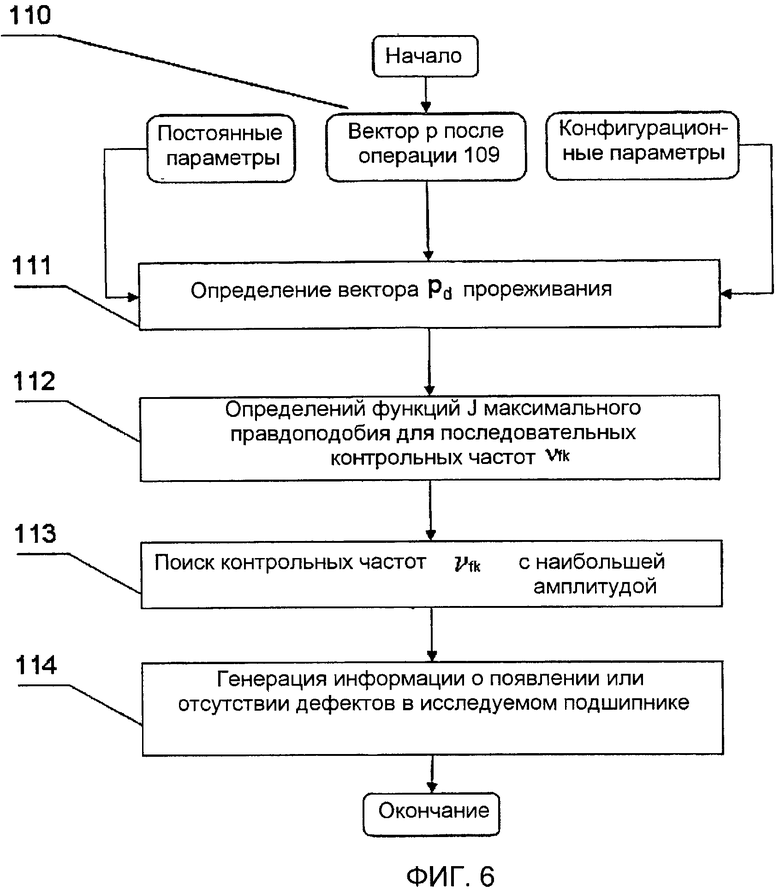
фиг. 6 - диаграмму операций, выполняемых при идентификации дефектов в подшипниках в соответствии с настоящим способом.
Описание предпочтительных вариантов воплощения изобретения
Подшипник 2 качения, установленный на вращающемся валу 1, содержит точки измерений, обозначенные на корпусе подшипника, в которых устанавливают датчик 3 вибраций для измерения вибраций подшипника и датчик 4 скорости вала 1. Датчики подсоединяют к измерительному устройству 5, применяемому для измерения аналогового сигнала напряжения, пропорционального вибрациям работающего подшипника 2, и для измерения скорости вращения вала. Выход измерительного устройства 5 подключен к входу процессора 6, в памяти 7 которого можно выделить модуль 8 обработки и функциональный модуль 9. Модуль 8 обработки содержит систему 10 обработки, в которой измеренный сигнал преобразуется в цифровой сигнал, который затем передается в виде входных данных в систему 11 фильтрации высоких частот, также содержащуюся в модуле 8, при этом составляющие сигнала, нежелательные для дальнейшего анализа, отфильтровываются. Выходные данные, полученные из системы 11, подаются в детектор 12 ударных импульсов, который входит в состав систем функционального модуля 9 процессора 6. Конфигурационные данные 13, относящиеся к математическим вычислениям, выполняемым в функциональном модуле 9, и входные данные 14, которые являются известными частотами дефектов контролируемых подшипников 2 качения, также подаются в функциональный модуль 9. Выходные данные из системы детектора 12 ударных импульсов передаются в идентификатор 15 отказов, который принадлежит к функциональному модулю 9 и в котором выполняется идентификация дефектов подшипников качения. Выход процессора 6 соединен с устройством для визуализации и/или записи полученных результатов 16, которое может быть компьютерным дисплеем, принтером или любым носителем для записи данных.
Способ по изобретению реализуют в соответствии со следующими операциями, показанными на фиг. 6.
Измерение вибраций и скорости вращения
Посредством датчика 3 вибраций и измерительного устройства 5 измеряются вибрации работающего подшипника 2 качения в указанных точках 3 измерений, и посредством датчика 4 скорости и измерительного устройства 5 измеряется скорость вращения вала 1, установленного на подшипнике - (операция 101).
Аналого-цифровое преобразование
Результаты измерений преобразуются из аналоговой формы в цифровые данные в блоке 10 обработки или в измерительном устройстве 5, и затем данные результаты сохраняются в цифровой форме в памяти 7 процессора 6 компьютерного устройства в виде временной диаграммы сигнала волнового процесса - (операция 102).
Фильтрация цифровых данных
Сохраненные данные предварительно фильтруются в системе 11 фильтрации высоких частот с формированием временной диаграммы X волнового процесса, где X=x[k, k+1, k+2, …, k+K], где k обозначает последовательные временные отсчеты обработанного сигнала из диапазона от 1 до K. В качестве системы фильтрации высоких частот можно применить, например, фильтр КИХ-фильтр (фильтр с конечной импульсной характеристикой (FIR)). Характерная особенность КИХ-фильтра состоит в том, что его отклик на данную последовательность входных отсчетов имеет конечную длину. Целью фильтрации данных является удаление сигналов с частотой ниже, чем предварительно установленный предел, составляющий один из конфигурационных параметров - (операция 103).
Адаптивная фильтрация и определение отношений M S правдоподобия ударных импульсов
Данные, полученные в результате предварительной фильтрации, передаются в детектор 12 ударных импульсов, в котором выполняется адаптивная фильтрация временной диаграммы сигнала волнового процесса, и определяются отношения MS правдоподобия ударных импульсов. В детекторе 12 ударных импульсов, с начала предварительно фильтрованной временной диаграммы X волнового процесса выбираются соседние опорный интервал длиной Kr и контрольный интервал длиной Kt. Длина Kr опорного интервала меньше, чем период времени известного дефекта подшипника с максимальной частотой, полученной из входных данных (14), и длина контрольного интервала Kt меньше, чем или равна, по меньшей мере, половине длины опорного интервала. В предпочтительном варианте принимается, что длина контрольно интервала составляет 15% от длины опорного интервала. Затем принимается определенное число фильтров NS, предпочтительно NS=5, и для каждой L-той фильтрации, где L является натуральным числом из диапазона от 1 до NS, выполняется адаптивная фильтрация сигнала из контрольного и опорного интервалов, после чего для каждой L-той фильтрации вычисляется отношение MS правдоподобия ударных импульсов в соответствии со следующей зависимостью - (операция 104):
 , (1)
, (1)
где:
τt[L] - среднеквадратическое значение сигнала в исследуемом контрольном интервале, подвергнутого L-той фильтрации, определяемое в следующей форме:
, (2)
и τr[L] - среднеквадратическое значение сигнала в исследуемом опорном интервале, подвергнутого L-той фильтрации, определяемое в следующей форме:
, (3)
где:
L - натуральное число в диапазоне 1 … NS и означает число фильтров;
K - суммарная длина исследуемой временной диаграммы обработанного сигнала волнового процесса;
Kt, Kr - длины контрольного и опорного интервалов соответственно;
kt, kr - последовательные натуральные числа от 1 до Kt или до Kr;
- вектор, представляющий исследуемый контрольный интервал сигнала, подвергнутого L-той адаптивной фильтрации;
- вектор, представляющий исследуемый опорный интервал сигнала, подвергнутого L-той адаптивной фильтрации.
Верификация появления ударного импульса в контрольном интервале
Для каждой L-той адаптивной фильтрации значение отношения MS правдоподобия ударных импульсов сравнивают с предварительно установленной пороговой величиной SL, ранее введенной в память компьютерного устройства, и, если отношение MS правдоподобия больше, чем SL через, по меньшей мере, S1 фильтров, то это означает, что ударный импульс появился в исследуемом контрольном интервале, а если отношение MS правдоподобия больше, чем SL через менее, чем S1 фильтров, то это означает, что ударный импульс не появился в исследуемом контрольном интервале, при этом появление ударного импульса в контрольном интервале записывается в двоичной форме в виде вектора pn посредством заполнения исходных элементов вектора pn цифрами «1» или цифрами «0» при отсутствии появления ударного импульса - (операция 105).
Определение остальных элементов двоичного вектора p n
На временной диаграмме X обработанного сигнала волнового процесса определяются итеративным методом последующие соседние контрольный и опорный интервалы, смещенные относительно ранее найденных интервалов на предварительно установленный шаг, и повторяются операции, относящиеся к адаптивной фильтрации, определению отношений MS правдоподобия ударных импульсов для всех последующих контрольных интервалов, при предварительно установленном числе NS фильтраций, и верификации появления ударного импульса для всех интервалов всей временной диаграммы X обработанного сигнала волнового процесса, и, таким образом, получают остальные элементы двоичного вектора pn. Двоичный вектор pn сохраняется в памяти 7 процессора 6 в виде двоичной временной диаграммы волнового процесса, которая принимает значения 1 в области появления ударных импульсов и 0 в области, в которой ударные импульсы не появляются - (операция 106).
Определение вектора p r
Выполняется обращение порядка временных отсчетов в сохраненной, предварительно отфильтрованной временной диаграмме X обработанного сигнала волнового процесса в контрольном и опорном интервалах, и для подобной обращенной временной диаграммы сигнала волнового процесса выполняются все предыдущие операции от 104 до 106, как описано выше, и информация о присутствии ударных импульсов сохраняется в виде двоичного вектора pr, в котором значение 1 обозначает присутствие ударного импульса для данного временного отсчета и значение 0 обозначает его отсутствие (операция 107).
Определение вектора p
Обращается порядок элементов в двоичном векторе pr, и выполняется логическое суммирование с вектором pn для получения двоичного вектора p. Двоичный вектор p сохраняется в памяти 7 процессора 6 (операция 109) в виде двоичной временной диаграммы волнового процесса, которая принимает значения 1 в области появления ударных импульсов и 0 в области, в которой ударные импульсы не появляются - (операция 108).
Сохранение вектора p в памяти процессора
Полученные результаты сохраняются в специальном оборудовании 18 - (операция 109).
- Затем элементы вектора p служат в качестве предварительных данных для автоматической идентификации дефектов подшипников - (операция 110).
Для определения среднеквадратического значения сигнала в опорном интервале τ r[L], подвергнутого L-той адаптивной фильтрации, что необходимо для определения отношения MS правдоподобия ударного импульса, используют математические зависимости, в которых автоковариационная матрица Cr задана как связь между ортогональными матрицами V и UT и матрицей ∑r. Диагональные элементы матрицы ∑r не равны нулю, неотрицательны, и упомянутые элементы обозначают среднеквадратические значения τ r[L]. Упомянутая зависимость определяется следующей формулой:
Cr=V∑rVT, (4)
где матрица ∑r задана следующей зависимостью:
, (5)
При этом автоковариационная матрица Cr задана следующим образом:
, (6)
где:
,
x r[k r] - элементы опорного интервала;
k r - последовательные натуральные числа от 1 до Kr;
i r - последовательные натуральные числа от 1 до L;
K r - длина опорного сигнала.
В результате сравнения зависимостей 4 и 6, с использованием сингулярной декомпозиции (SVD) автоковариационной матрицы, получают среднеквадратическое значение сигнала в опорном интервале τ r[L].
Затем, для определения среднеквадратического значения сигнала в контрольном интервале τ t[L], подвергнутого L-той адаптивной фильтрации, что необходимо для определения отношения MS правдоподобия ударного импульса, используют следующие математические зависимости:
, (7)
где:
- элементы матрицы Zt, представленной в форме:
 , (8)
, (8)
и вычисляемой в соответствии со следующей зависимостью:
Zt=XtU, (9)
где матрица X t определяется следующим образом:
 , (10)
, (10)
и матрица U является ортогональной матрицей, элементы которой являются коэффициентами адаптивного фильтра, при этом:
Kt - длина исследуемого контрольного интервала;
xt[kt] - элементы контрольного интервала;
kt - последовательные натуральные числа от 1 до Kt;
Nt=Kt-L.
Затем, идентификация дефекта в подшипнике или подшипниках выполняется автоматически в идентификаторе 15 дефекта для двоичного вектора p, найденного с помощью способа согласно изобретению и базы входных данных, которые являются известными частотами отказов исследуемого подшипника или подшипников, Ff=[ff1, ff2, …, ffK], с помощью следующих операций, показанных на фиг. 6.
Двоичный вектор p d прореживания определяют
прореживанием двоичного вектора p с предварительно установленным коэффициентом прореживания, чтобы получить двоичный вектор pd прореживания - (операция 111).
Функции J максимального правдоподобия определяют для последовательных частот f fK дефектов в контролируемом подшипнике.
Для каждой последовательной известной частоты ffK дефекта из набора Ft контролируемого подшипника контрольная частота определяется грубо и затем точно из окрестности Pg известной частоты ffK дефекта, где Pg, упоминаемый также как поисковый частотный диапазон, является конфигурационным параметром, обозначающим диапазон поиска в связи с данной частотой дефекта (смотри фиг. 4). Затем с использованием известных математических принципов, для каждой упомянутой контрольной частоты ν
jK определяется функция J максимального правдоподобия с использованием двоичного вектора pd прореживания - (операция 112).
Поиск ударного импульса с наибольшей амплитудой.
Максимальное значение JA функции J максимального правдоподобия определяется проверкой контрольной частоты ν jK, для которой функции J правдоподобия достигает максимального значения JA - (операция 113).
Генерация информации о появлении или отсутствии дефектов в исследуемом подшипнике
Вычисляется отношение FA максимального значения JA к уровню nA шумов, и результат вычисления сравнивается с предварительно установленным пороговым параметром SA. Если отношение FA больше, чем предварительно установленный пороговый параметр SA, то автоматически генерируется информация, что конкретный дефект появился в исследуемом подшипнике, например, ff1, соответствующая контрольной частоте ν jK.
Когда отношение FA меньше, чем или равно предварительно установленному пороговому параметру SA, это означает, что ни один из обнаруженных ударных импульсов, присутствующих в форме двоичного вектора, не соответствует исследуемой частоте, которая будет аналогична контрольной частоте дефектов контролируемых подшипников, и тогда автоматически генерируется информация, что ни один конкретный дефект не проявился в исследуемом подшипнике или подшипниках - (операция 114).
Для определения максимального значения JA функции J максимального правдоподобия применяются следующие математические зависимости:
, (11)
где:
N h - предварительно установленное число исследуемых гармоник,
и Ak - амплитуда гармоники, найденная во временной области с использованием двоичного вектора p, представленного в форме синусоидальной модели.
Двоичный вектор p представляется в виде суммы синусоидальной модели и вектора шума:
, (12)
который можно также представить в следующей матричной форме:
p=Bθ+e, (13)
где:
ϕ k - фаза,
ω k=2πνk/f s, k=1,2…N h, - угловая скорость, соответствующая контрольной частоте (ν), и k=1, 2…N h,
f s - частота взятия отсчетов измеренного аналогового сигнала, когда выполняется аналого-цифровое преобразование;
e=[ε[n]]T - вектор шума;
n - натуральное число от 1 до N-1;
N - число элементов в двоичном векторе (p);
B - матрица известных постоянных параметров, представленная в следующей форме:
θ - вектор с неизвестными параметрами, представленный в следующей форме:
θ=[A 1cos(ϕ 1), A1sin(ϕ 1), A2cos(ϕ 2), A2sin(ϕ 2),…, A Nhcos(ϕ Nh), ANhsin(ϕ Nh)],
который равен оценке по методу наименьших квадратов для зависимости:
θ=(B T B) -1 B T p,
где: p является двоичным вектором в следующей форме:
p=[p[0],p[1],…,p[N-1]]T.
Сравнение зависимостей 12 и 13 позволяет получить значения амплитуд Ak гармоник, необходимые для вычисления отношения JA, которое затем применяется для определения места появления дефекта, т.е. подшипника, который может быть дефектным, и типа появляющегося дефекта.
Уровень nA шумов вычисляется с использованием медианных или средних значений максимальной функции J, найденной в окрестности исследуемой частоты f fK дефекта.
Окончательным результатом выполненных операций является автоматическая генерация информации о присутствии или отсутствии дефектов в исследуемом подшипнике или подшипниках. Появление дефектов вызывает автоматическую генерацию информации о том, который из исследуемых подшипников поврежден и какой тип дефекта имеет место.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения момента трения в подшипниках качения | 2017 |
|
RU2659101C1 |
| СПОСОБ СИНТЕЗА МНОГОЛУЧЕВОЙ САМОФОКУСИРУЮЩЕЙСЯ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКИ С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРИЧЕСКОЙ МОДЕЛИ КОРРЕЛЯЦИОННОЙ МАТРИЦЫ ПРИНИМАЕМОГО СИГНАЛА | 2017 |
|
RU2659608C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2012 |
|
RU2517365C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПРОГНОЗИРОВАНИЯ ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА НИЗКИХ ОРБИТАХ, ПОДВЕРЖЕННОГО ВЛИЯНИЮ ТОРМОЖЕНИЯ В АТМОСФЕРЕ | 2011 |
|
RU2463223C1 |
| Устройство для адаптивного приема дискретных сигналов | 1982 |
|
SU1083396A1 |
| Устройство адаптивного приема дискретных сигналов | 1982 |
|
SU1113891A1 |
| Способ пространственно-временного приема сигналов с аналоговой модуляцией с отслеживанием изменяющегося направления на источник сигнала | 2016 |
|
RU2628876C1 |
| СПОСОБ ПРИЕМА OFDM СИГНАЛОВ | 2017 |
|
RU2719396C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППИРОВАНИЕМ НАБЛЮДЕНИЙ ПРИ ФИЛЬТРАЦИИ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2011 |
|
RU2453990C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА РАДИОСИГНАЛА | 2021 |
|
RU2787952C1 |
Изобретение относится к области подшипниковой техники и направлено на точное выявление дефектов работающих подшипников качения на ранней стадии их возникновения, что обеспечивается за счет того, что вибрации работающего подшипника, измеренные в виде временной диаграммы аналогового сигнала волнового процесса, преобразуют в цифровые данные и предварительно фильтруют известным способом. При этом согласно изобретению обнаружение ударных импульсов выполняют с использованием двоичного вектора, который определяют в процессе следующих операций: на предварительно отфильтрованной временной диаграмме обработанного сигнала волнового процесса выбирают два исходных соседних векторных интервала, один из которых является опорным интервалом, а другой является контрольным интервалом, и сигналы, присутствующие в контрольном и опорном интервалах, подвергают многократной фильтрации, в результате которой после каждой фильтрации вычисляют отношения правдоподобия ударных импульсов, определяемые как отношение среднеквадратических значений фильтрованного сигнала, присутствующего в контрольном интервале, к среднеквадратическим значениям фильтрованного сигнала, присутствующего в опорном интервале, сравнивают вычисленные отношения правдоподобия с предварительно установленной пороговой величиной и оценивают вероятность появления ударного импульса в первом контрольном интервале, информацию о появлении ударного импульса в исследуемом контрольном интервале записывают как исходные элементы двоичного вектора и затем определяют все остальные элементы двоичного вектора для всех последующих контрольных и опорных интервалов, которые выбирают итеративно, со смещением в конкретном направлении, и упомянутые элементы двоичного вектора принимают значения 1 в области появления ударного импульса и 0 в области, в которой ударный импульс не появляется. 10 з.п. ф-лы, 6 ил.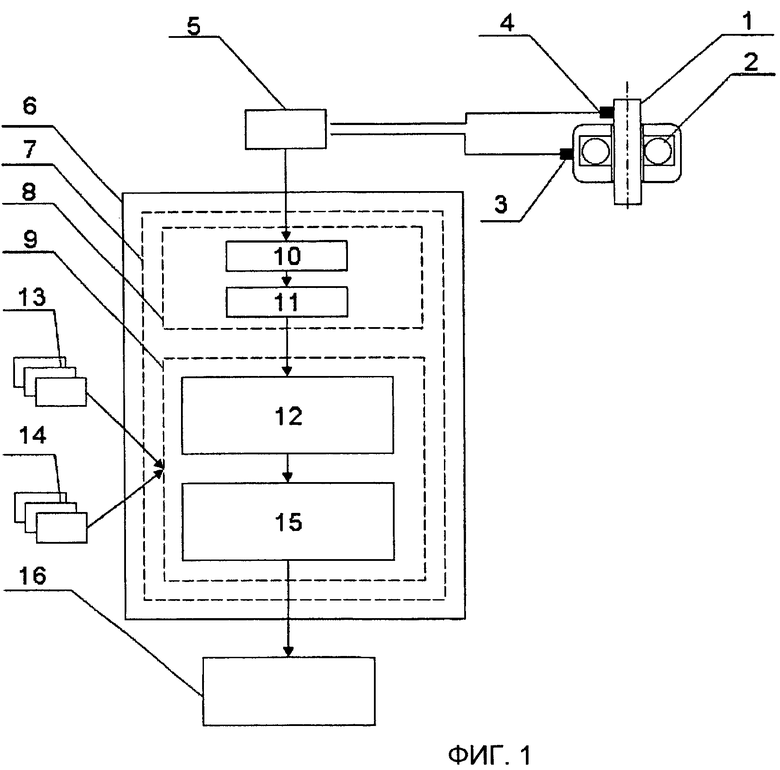
1. Способ обнаружения и автоматической идентификации повреждений подшипников качения, в котором вибрации работающего подшипника, измеренные в виде временной диаграммы аналогового сигнала волнового процесса, преобразуют в цифровые данные и предварительно фильтруют известным способом, отличающийся тем, что обнаружение ударных импульсов выполняют с использованием двоичного вектора (р), который определяют в процессе следующих операций: на предварительно отфильтрованной временной диаграмме обработанного сигнала волнового процесса выбирают два исходных соседних векторных интервала, один из которых является опорным интервалом, и другой является контрольным интервалом, и сигналы, присутствующие в контрольном и опорном интервалах, подвергают многократной фильтрации, в результате которой, после каждой фильтрации вычисляют отношения правдоподобия ударных импульсов, определяемые как отношение среднеквадратических значений фильтрованного сигнала, присутствующего в контрольном интервале, к среднеквадратическим значениям фильтрованного сигнала, присутствующего в опорном интервале, сравнивают вычисленные отношения правдоподобия с предварительно установленной пороговой величиной и оценивают вероятность появления ударного импульса в первом контрольном интервале, информацию о появлении ударного импульса в исследуемом контрольном интервале записывают как исходные элементы двоичного вектора (р), и затем определяют все остальные элементы двоичного вектора (р) для всех последующих контрольных и опорных интервалов, которые выбирают итеративно, со смещением в конкретном направлении, и упомянутые элементы двоичного вектора (р) принимают значения 1 в области появления ударного импульса и 0 в области, в которой ударный импульс не появляется.
2. Способ по п.1, отличающийся тем, что среднеквадратическое значение сигнала в исследуемом контрольном интервале, подвергнутого L-й фильтрации (τt[L]), определяют на основании следующей зависимости:
а среднеквадратическое значение сигнала в исследуемом опорном интервале, подвергнутого L-й фильтрации τr[L], определяют на основании следующей зависимости:
где L - натуральное число из интервала 1…NS и означает число фильтров;
Kt - длина исследуемого контрольного интервала;
Kr - длина опорного интервала;
kt, kr - последовательные натуральные числа от 1 до Kt или до Kr;
 - вектор, представляющий исследуемый контрольный интервал сигнала, подвергнутого L-й фильтрации;
- вектор, представляющий исследуемый контрольный интервал сигнала, подвергнутого L-й фильтрации;
 - вектор, представляющий исследуемый опорный интервал сигнала, подвергнутого L-й фильтрации.
- вектор, представляющий исследуемый опорный интервал сигнала, подвергнутого L-й фильтрации.
3. Способ по п.2, отличающийся тем, что среднеквадратическое значение сигнала в исследуемом опорном интервале (τr[L]) определяют с использованием L-й фильтрации, которая является адаптивной фильтрацией, с использованием сингулярной декомпозиции (SVD) автоковариационной матрицы (Cr) в соответствии со следующей зависимостью:
Cr=V∑rUT,
где матрица (∑r) является диагональной матрицей, диагональные элементы которой являются ненулевыми и неотрицательными и означают среднеквадратические значения (τr[L]):
и матрицы (V) и (U) являются ортогональными матрицами, и при этом автоковариационная матрица (Cr) имеет следующую форму:
в которой:
где xr[kr] - элементы опорного интервала;
kr - последовательные натуральные числа от 1 до Kr;
ir - последовательные натуральные числа от 1 до L;
Kr - длина опорного интервала;
L - число адаптивных фильтров.
4. Способ по п.2, отличающийся тем, что среднеквадратическое значение сигнала в исследуемом контрольном интервале (τt[L]) определяют с использованием L-й фильтрации, которая является адаптивной фильтрацией, на основании следующей зависимости:
где  - элементы матрицы Zt, представленной в следующей форме:
- элементы матрицы Zt, представленной в следующей форме:
и вычисляемой в соответствии со следующей зависимостью:
Zt=XtU,
где матрица (Xt) определяется следующим образом:
и матрица (U) является ортогональной матрицей, элементы которой являются коэффициентами адаптивного фильтра, при этом:
Kt - длина исследуемого контрольного интервала;
xt[kt] - элементы контрольного интервала;
kt - последовательные натуральные числа от 1 до до Kt;
Nt=Kt-L;
L - число адаптивных фильтров.
5. Способ по п.1 или 2, отличающийся тем, что многократную фильтрацию сигналов в контрольном и опорном интервалах выполняют с использованием полосового фильтра.
6. Способ по п.1, отличающийся тем, что длина контрольного интервала (Kt) составляет 15% от длины опорного интервала (Kr).
7. Способ по п.1, отличающийся тем, что идентификация дефекта в подшипнике или подшипниках выполняется автоматически для двоичного вектора (р), определяемого для всех исследуемых контрольных и опорных интервалов временной диаграммы (X) обработанного сигнала волнового процесса и набора известных частот дефектов исследуемого подшипника или подшипников, ((Ff)=[ff1, ff2, …, ffK]), с помощью следующих операций:
для каждой последовательной известной частоты (ffK) дефекта из набора (Ft) исследуемого подшипника определяют контрольную частоту  , которая принадлежит к окрестности (Pg) известной частоты (ffK) дефекта, где (Pg) является конфигурационным параметром, означающим поисковый частотный диапазон, связанный с известной частотой дефекта, и затем с использованием известных математических принципов максимального правдоподобия для каждой контрольной частоты (νfK) определяют функцию (J) максимального правдоподобия во временной области с использованием двоичного вектора (р),
, которая принадлежит к окрестности (Pg) известной частоты (ffK) дефекта, где (Pg) является конфигурационным параметром, означающим поисковый частотный диапазон, связанный с известной частотой дефекта, и затем с использованием известных математических принципов максимального правдоподобия для каждой контрольной частоты (νfK) определяют функцию (J) максимального правдоподобия во временной области с использованием двоичного вектора (р),
затем проверяют для какой контрольной частоты (νfK) функция (J) максимального правдоподобия достигает максимального значения (JA), вычисляют отношение (FA) максимального значения (JA) к уровню (nА) шумов и результат сравнивают с предварительно установленным пороговым параметром (SA), где уровень (nA) шумов вычисляют с использованием максимальных значений функции (J),
если отношение (FA) больше, чем предварительно установленный пороговый параметр (SA), то автоматически генерируется информация об исследуемом дефекте подшипника с конкретной частотой, которая принадлежит набору (Ft) и соответствует контрольной частоте (νfK),
если отношение (FA) меньше чем или равно предварительно установленному пороговому параметру (SA), то принимается, что ни один из ударных импульсов, присутствующих в двоичном векторе р, не соответствует ни одной из известных частот (ffK) дефектов исследуемых подшипников, и автоматически генерируется информация, что ни один конкретный дефект не проявился в исследуемом подшипнике или подшипниках.
8. Способ по п.7, отличающийся тем, что контрольную частоту νfK, для которой функция максимального правдоподобия, вычисленная для двоичного вектора (р) во временной области, достигает максимального значения (JA), определяют максимизацией суммы квадратов амплитуд (Ak) гармоник в соответствии со следующей зависимостью:
где Nh - предварительно установленное число исследуемых гармоник;
Ak - амплитуда гармоники, найденная во временной области с использованием двоичного вектора р, представленного в форме синусоидальной модели.
9. Способ по п.8, отличающийся тем, что значения амплитуд (Ak) гармоник определяют во временной области с использованием двоичного вектора (р), представленного в форме синусоидальной модели, в которой бинарный вектор (р) представляется в виде суммы синусоидальной модели и вектора шума:

который можно также представить в следующей матричной форме:
р=Вθ+е,
где ϕk - фаза;
ωk=2πvk/fs, k=1, 2 … Nh - угловая скорость, соответствующая контрольной частоте (νfK), и k=1, 2 … Nh;
fs - частота взятия отсчетов для аналого-цифровой обработки измеренного аналогового сигнала;
e=[ε[n]]T - вектор шума;
n - натуральное число от 1 до N-1;
N - число элементов в двоичном векторе (р);
В - матрица известных постоянных параметров, представляемая в следующей форме:

θ - вектор с неизвестными параметрами, представленный в следующей форме:
 который является оценкой по методу наименьших квадратов для зависимости:
который является оценкой по методу наименьших квадратов для зависимости:
θ=(BTB)-1BTp,
где (р) является двоичным вектором в следующей форме:
p=[p[0],p[1],…,p[N-1]]T.
10. Способ по п.7, отличающийся тем, что уровень (nA) шумов вычисляют взятием медианы максимальных значений (J) функции, найденных в окрестности исследуемой частоты (ffK) дефектов из набора (Ff).
11. Способ по п.7, отличающийся тем, что уровень (nA) шумов вычисляют взятием среднего значения из максимальных значений (J) функции, найденных в окрестности исследуемой частоты (ffK) дефектов из набора (Ff).
| СПОСОБ ПРИГОТОВЛЕНИЯ ЭЛЕКТРОДОВ ДЛЯ ДУГОВОЙ ЭЛЕКТРИЧЕСКОЙ СВАРКИ ПЕРЕМЕННЫМ ТОКОМ | 1925 |
|
SU4361A1 |
| US 5477730 A, 26.12.1995 | |||
| US 6591682 B1, 15.07.2003 | |||
| JP 2005300517 A, 27.10.2005 | |||
| Способ обнаружения повреждений подшипников качения | 1980 |
|
SU951942A1 |
| Способ диагностики подшипников качения | 1979 |
|
SU783620A1 |

