(54) РЫБОРАЗДЕЛОЧНАЯ МАШИНА, 

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для настройки рабочих органов рыборазделочной машины | 1978 |
|
SU740213A1 |
| Устройство для настройки рабочих органов рыборазделочной машины | 1976 |
|
SU682207A1 |
| Устройство для настройки рабочего органа рыборазделочной машины | 1974 |
|
SU611600A1 |
| УСТРОЙСТВО ВВОДА И ХРАНЕНИЯ КЛЮЧЕВОЙ ИНФОРМАЦИИ | 2000 |
|
RU2175775C1 |
| Устройство для настройки рабочего органа однооперационной рыборазделочной машины | 1974 |
|
SU613748A1 |
| Многоканальный регулятор тепловых процессов (его варианты) | 1980 |
|
SU943667A1 |
| Устройство для обработки информации датчиков | 1980 |
|
SU955093A1 |
| Устройство для разделки рыбы | 1975 |
|
SU562257A1 |
| Машина для разделки плоских рыб | 1958 |
|
SU123299A1 |
| СПОСОБ И АППАРАТ ДЛЯ ПОТРОШЕНИЯ РЫБЫ | 1998 |
|
RU2224438C2 |



1
Изобретение относится к рыборазделочному оборудованию и может быть использовано для автоматической обработки различных пород рыб в поточно-механизированных линиях.
Известна рыборазделочная машина, в которой предусмотрена автоматическая настройка рабочих органов па размер обрабатываемой рыбы. Эта машина содержит транспортируюш,ий орган в виде кольцевого барабанного или линейного конвейера, на котором располагают вдоль или поперек в кассетах (или без них), накалываюш,ий конвейер, операционные механические узлы: отрезания головы, подрезания брюшной полости, зачистки брюшной полости, отрезания брюшной полости с остатками внутренностей, разрезания и зачистки брюшной полости при обработке рыбы на тушку, филетировки, перемешения рыбы на экономичный рез головы, узел разворота рыбы на экономичный подрез брюшной полости при разделке рыбы с сохранением при этом икры и печени, узел разворота рыбы при разделке ее на тушку или филе, узел сброса тушки и датчик линейных размеров рыбы.
В такой машине предусмострена взаимосвязь между датчиком линейных размеров рыбы и операционными механическими узлами, при этом последние выполнены с возможностью изменения их положения в зависимости от размера рыбы.
Для повышения выхода готовой продукции при разделке различных пород рыбы, улучшения качества продукции предлагаемая машина дополнительно снабжена вычислительным устройством, датчиком генератора тактовых импульсов, коммутаторами и блоками управления питания, временных задержек, управления исполнительными механизмами и блоком памяти. Блок памяти соединен с вычислительным устройством, подключенным к датчику линейных размеров рыбы. Выход датчика генератора тактовых импульсов связан посредством генератора тактовых импульсов с коммутаторами, подключенными к блоку памяти и блоку временных задержек, выход которого соединен с блоком пуска, а блок управления исполнительными механизмами подсоедипен к блоку памяти и операционным механическим узлам.
На фиг. 1 схематично изображена предлагаемая машина; на фиг. 2 - генератор тактовых импульсов для четырех операций; на фиг. 3 - коммутатор 1; на фиг. 4 - коммутатор II; на фиг. 5 - блок управления питамием; на фиг. 6 - блок пуска; на фиг. 7 - вычислительное устройство; на фиг. 8 - блок памяти; на фиг/9 - однотипный узел блока памяти; па фиг. 10 - блок управления исполнительными механизмами; на фиг. 11 - датчик линейного размера рыбы.
Рыборазделочная машина содержит транспортирующий орган 1 (см. фиг. 1) для перемещения рыбы и накалывающий конвейер 2, вдоль которых размещены операционные механические узлы: узел 3 для перемещения рыбы на экономичный рез головы, узел 4 для отрезания головы, узел 5 для разворота рыбы на экономичный подрез брющной полости при разделке рыбы с сохранением икры и печени, узел 6 для подрезания брющной полости, узел 7 для зачистки брющной полости, узел 8 для разворота рыбы при разделке ее на тущку или филе, узел 9 для отрезани я брющной полости с остатками внутренностей, узел 10 для разрезания брющной полости при обработке рыбы на тущку, узел 11 для зачистки брющной полости, узел 12 для сброса тущки, узел 13 для филетировки. В состав мащины входят также датчик 14 генератора тактовых импульсов, соединенный с генератором 15 тактовых импульсов (ГТИ), выход которого соединен с коммутаторами 16 и 17, подключенными к блоку памяти 18, соединенному с вычислительным устройством (ВУ) 19, подключенным к датчику 20 линейных размеров рыбы (ДЛР), а также блок 21 управления нитанием, нодключенный к выходу блока пуска 22, и к упомянутому датчику 20 линейпь1х размеров, и блок 23 временных задержек. Входы последнего соединены с выходами коммутаторов 16 и 17, а выходы - со входами упомянутого блока пуска. Мащина снабжена блоком 24 управления исполнительными механизмами, соединенным с выходами блока намяти и с онерапионными механическими узлами 3, 5, 8, 10, и блоком питания 25.
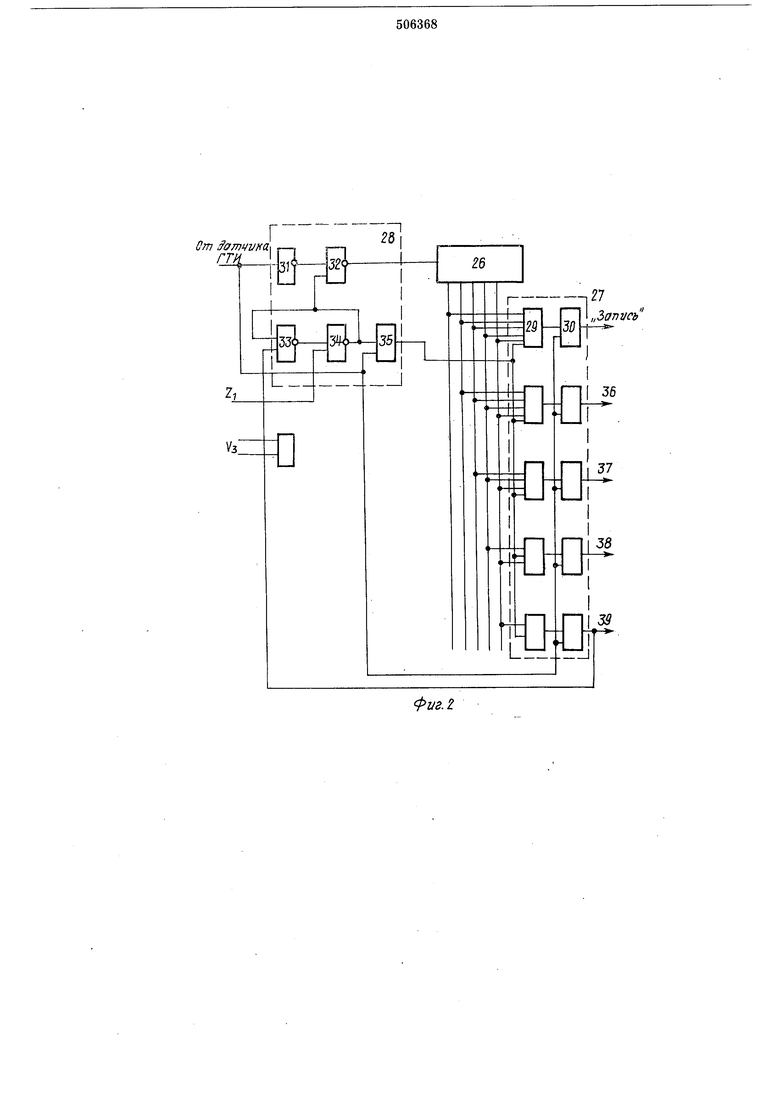
Генератор 15 тактовых импульсов (см. фиг. 2) состоит из распределителя 26, узла 27 формирования сигналов управления коммутаторами 16, 17, узла управления 28 и реле подачи питания.
Распределитель 26 состоит из триггеров со счетными входами и диодной матрицы. Узел 27 включает в себя набор нар ячеек дизъюнкции 29 и конъюнкции 30.
Узел 28 состоит из ячеек ИЛИ-НЕ 31-34 и ячейки конъюктора 35.
Входами генератора тактовых импульсов являются сигнал от датчика 14 генератора тактовых импульсов, сигнал от кнопки «стоп и о срабатывании защиты сигнал Z, сигнал t/з на включение реле.
Выходами являются: сигнал «запись, запускающий распределители коммутатора 16, и сигналы 36-39 (см. фиг. 2), запускающие распределители коммутатора 17.
Коммутатор 16 (см. фиг. 3) содержит узлы 40-43 формирования импульсов записи (число узлов определяется числом пастроечных
операций мащины). В данном случае рассматривается устройство на четыре пастроечных операции, которое включает в себя распределители 44-47 и конъюкторы 48. Размер раснределителя зависит от размера регистров в блоке 18, который определяется величиной запоминаемого параметра и числом рыб, информацию о которых, выданную вычислительным устройством 19, требуется запомнить. Поэтому для первой по ходу конвейера настроечной операции этот размер будет минимальным, а для носледней - максимальным.
Входами коммутатора 16 являются сигналы
«запись, поступающие из ГТИ, сигпалы (см. фиг. 3) из блока 21 управления питанием, сигналы из блока пуска 22. Выходами коммутатора 16 являются импульсы записи (от ЯЗ до ЯЗи), унравляющие процессом записи информации в блоке памяти.
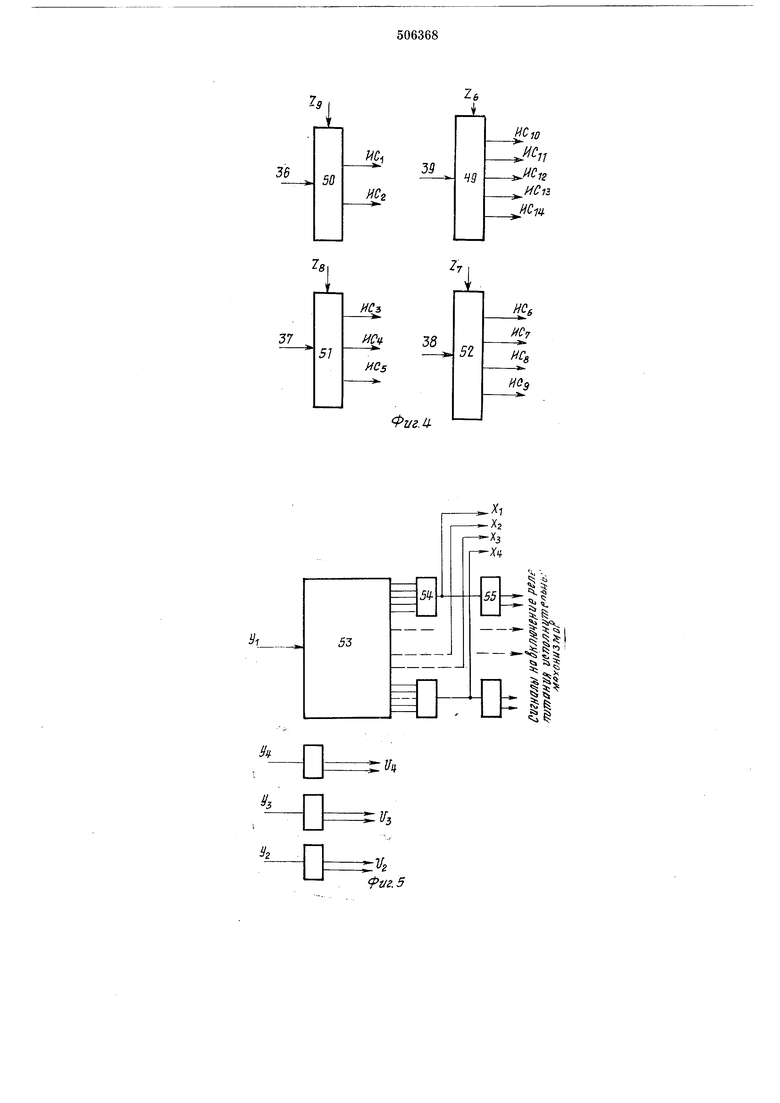
Коммутатор 17 содержит распределители импульсов считывания 49-52 (см. фиг. 4). Входными сигналами коммутатора являются сигналы 36-39, поступающие из ГТИ, и сигналы 2б-Zg из блока пуска 22, а выходными сигналами - импульсы считывания (от ЯС1 до ЯСн), управляющие процессом считывания информации с блока памяти для подачи ее в блок 24 управления исполнительными механизмами.
Влок 21 управления питанием содержит переключатель 53 режима работы (см. фиг, 5), задающий вид обработки рыбы и соответственно совокупность операций над ней, логические ячейки, дизъюнкторы 54 и усилители 55. Входными сигналами этого блока являются сигнал УЬ 2. УЗ. ноступающие из блока пуска 22, и сигналы У4 о включении главного выключателя питания.
Выходными сигналами блока являются сигналы от Х до Х, разрещающие проведение определенных операций при заданном виде обработки рыбы и поступающие в коммутатор 16 на включение питания исполнительных механизмов, сигнал /з на включение ГТИ 15, сигнал (/2 на реле включения питания логической части схемы (РВИЛ), сигнал на включение питания элементов, формирующих
сигналы У и УЗ.
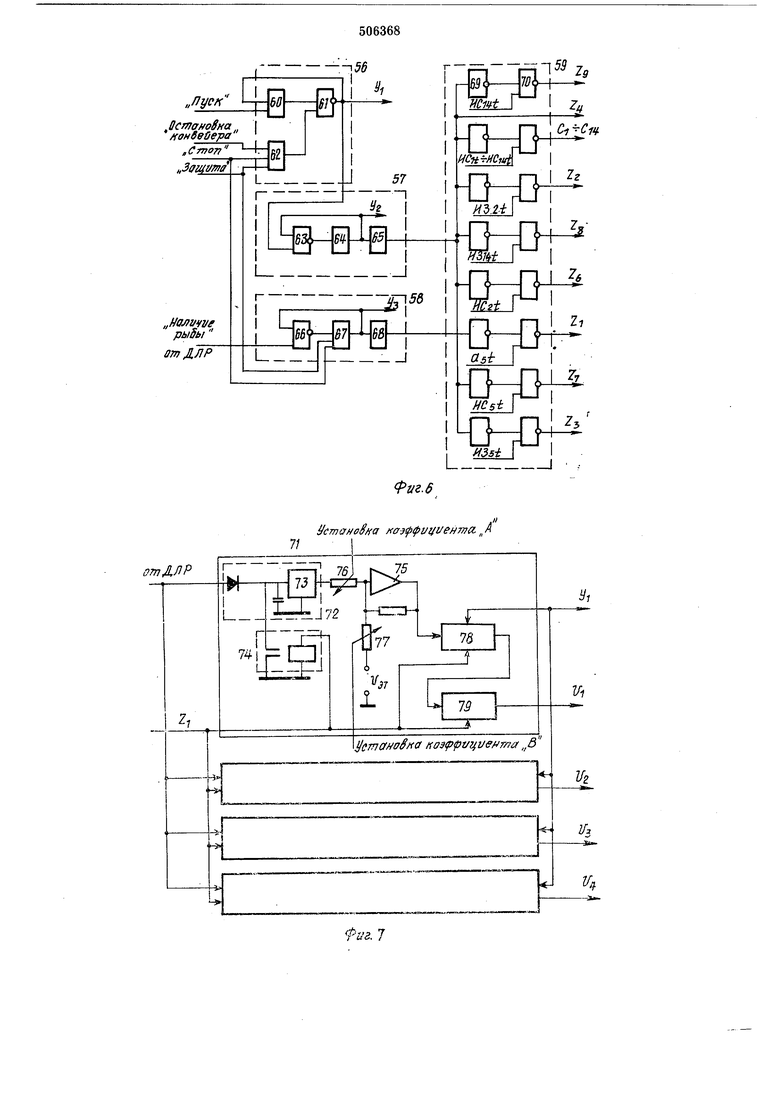
Блок пуска 22 содержит узел 56 формирования сигналов У (см. фиг. 6), разрещающий пуск устройства, узел 57 формирования сигнала У2, разрещающий включение РВПЛ, узел
58 формирования сигнала УЗ, разрещающий подавать питание на ГТИ, узел 59 формирования сигналов «сброс (Z), воздействующих на стирание информации, занисанной в регистрах блока намяти 18.
Узел 56 формирования сигнала У содержит две логические ячейки ИЛИ-НЕ 60, 61 и один конъюиктор 62.
Узел 57 формирования сигнала У2 содержит две логические ячейки ИЛИ-НЕ 63, 64 и одну задержку 65.
Узел 58 формирования сигнала УЗ содержит две логические ячейки ИЛИ-ИЕ 66, 67 и одну задержку 68.
Узел 59 формирования сигналов «сброс содержит однотипные сочетания ячеек ИЛИ- НЕ 69, 70.
Число групп этих ячеек зависит от числа распределителей в устройстве, а число последних зависит от числа операций. Схемное решение на фиг. 6 основано на упомянутых выше четырех операциях.
Входными сигналами блока пуска 22 являются сигналы от аппаратов пуска, остановки всей машины, от аппарата, например, кнопки «остановка конвейера, от аппарата заш,иты, от ДЛР, задержанные в блоке временных задержек 23 импульсы считывания ИСи и импульсы записи ИЗц и задержанный последний из серии сигнала от распределителя 26 генератора тактовых импульсов 15.
Выходными сигналами блока пуска 22 (см. фиг. 1 и 6) являются сигналы «сброс Zi на ГТИ 15; 2 - на распределитель 44, Zs - на распределитель 45, Z4 - на распределитель 46; Zg - на распределитель 47; ZQ - на распределитель 49; Z - на распределитель 52; ZB - на распределитель 51; Zg - на распределитель 50, от GI до Си - регистры блока памяти 18.
Вычислительное устройство (ВУ) 19 состоит из однотипных узлов 71 (см. фиг. 7), число которых определяется числом настраиваемых операций. В предлагаемой машине оно равно четырем.
Узел 71 содержит ячейку 72, запоминаюшую максимальное значение измеряемого параметра и состоящую из диода, емкости и цепочки транзисторов 73, включенных по схеме эмиттерного повторителя, реле 74 сброса заряда с емкости, операционный усилитель 75, резистор 76 и резистор 77, подключенный к эталонному источнику напряжения, служащие для установки соответствующих значений коэффициентов «А и «В, преобразователь ПНД 78 и счетчик 79, осуществляющие преобразование непрерывного сигнала с операционного усилителя 75 в двоичный код.
Блок памяти (см. фиг. 8) состоит из однотипных узлов 80, дизъюнкторов 81 и генератора импульсов 82. Число однотипных узлов для одной операции зависит от числа рыб, расположенных на конвейере между датчиком линейного размера и исполнительным механизмом данной операции.
Входами блока памяти являются сигналы сброса от Ci до Си из блока пуска 22, импульсы записи от ЯЗ до ЯЗи из коммутатора 17, импульсы считывания от ИСг до ИСи из коммутатора 16, информация из ВУ 19 в виде двоичных кодов от L/i до f/4.
Выходами блока памяти являются сигналы Wi-IFiv, Wj - Wy , Т, подаваемые в блок управления исполнительными механизмами 24.
Однотипный узел 80 блока памяти представляет собой ft-разрядный двоичный вычитающий счетчик с предварительным запоминанием информации и состоит из триггеров R-5-
Г-типа 83, триггера R-5-типа 84, конъюнкторов 85, элемента ИЛИ-НЕ 86. Число разрядов счетчика обусловливается размером кода, поступающего из ВУ, и определяется максимально вероятной величиной измеряемого размера рыбы.
1енератор импульсов 82 (см. фиг. 8) вырабатывает импульсы с частотой, равной максимальной частоте приемистости шаговых двигателей.
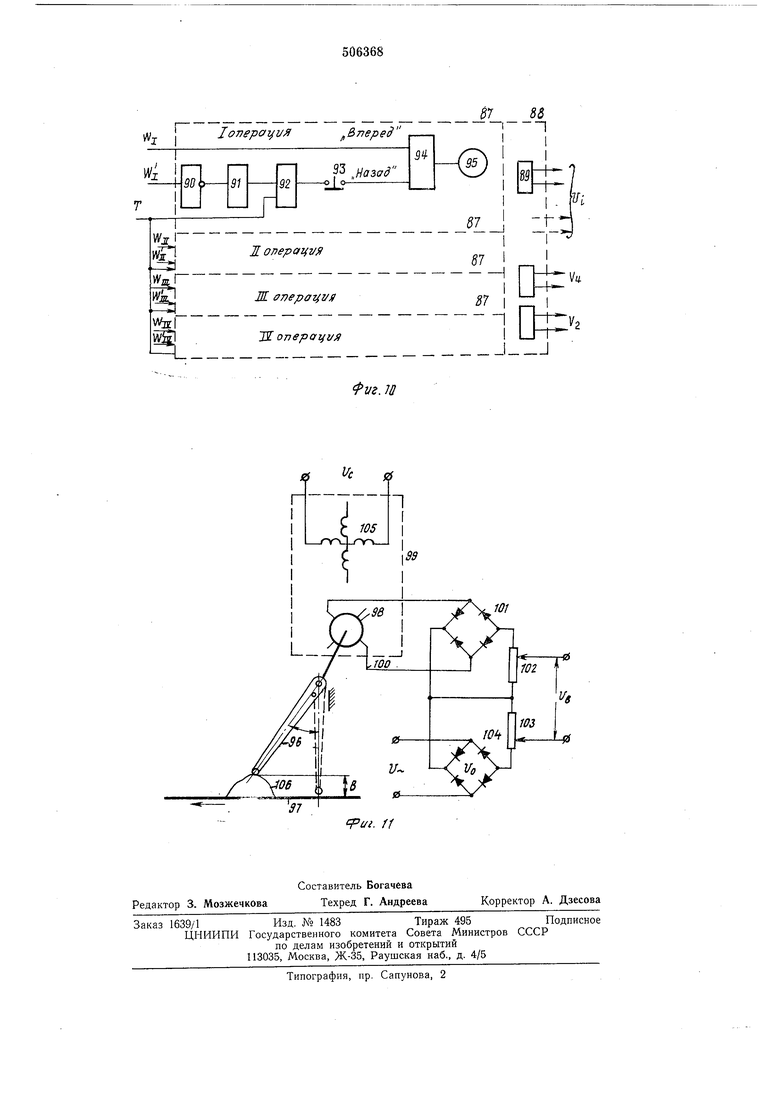
Блок управления исполнительными механизмами 24 состоит из однотипных узлов 87 (см. фиг. 10), число которых определяется числом настраиваемых операций (в приведенной на фиг. 1 схеме четыре таких операции, обозначенных стрелками), и узла 88, состоящего из реле 89 питания исполнительных механизмов. Каждый узел 87 (фиг. 10) состоит из инвертора 90, задержки 91, конъюнктора 92, конечного выключателя 93 исходного состояния механизма, коммутатора 94 шагового двигателя и шагового двигателя 95.
Входами блока управления исполнительными механизмами являются сигналы Wi-Wiv, Wj - WIY , Т, поступающие из блока памяти
18, и сигналы 1/2, Un, Ui, поступающие из блока управления питанием 21.
Датчик 20 линейных размеров рыбы состоит из подпружиненного качающегося щупа 96
(см. фиг. 11), установленного над конвейером 97, с которым связан ротор 98 вращающегося трансформатора 99, причем в вертикальном положении щупа напряжение на косинусной обмотке 100 вращающегося трансформатора
имеет максимальное значение. Конусная обмотка вращающегося трансформатора включена на вход диодного моста 101, выход которого включен на потенциометр 102, потенциометр 103 и на выход диодного моста 104, вход
которого включен на напряжение источника питания, равное напряжению на косинусной обмотке в вертикальном положении щупа 96. Статорная обмотка вращающегося трансформатора 105 подключена к источнику стабилизированного напряжения. Выходное напряжение снимается с потенциометров 102 и 103 и по величине пропорционально измеряемому размеру «В рыбы 106. Машина работает следующим образом.
Нри включении главного выключателя питания, т. е. при включении в сеть блока питания, появляется сигнал 4 (см. фиг. 5), и подается напряжение на питание логических элементов, участвующих в формировании сигналов У и 2 в блоке пуска (см. фиг. 6) посредством сигнала в блоке управления питанием (см. фиг. 5) и реле 89 (см. фиг. 10).. Включение рыборазделочной машины осуществляется нажатием кнопки «пуск (см.
фиг. 6). Нуск не разрешается, если сработают элементы защиты. По команде «пуск сигналом включается ВРПЛ 89 (см. фиг. 10), а также постунает сигнал Ui (см. фиг. 5) на включение приводов исполнительных механизмов. При этом запускаются транспортирующий орган 1 для перемещения рыбы, накалывающий конвейер 2, снабженный иглами для накалывания рыбы и движущийся синхронно с транспортирующим органом 1, и совокупность приводов, необходимая для выполнения заданной переключателем 53 программы обработки рыбы. В эту совокупность входят приводы узла 4 дисковых ножей для отрезания головы, привод узла 6 для подрезания брюшной полости, привод узла 9 для отрезания брющной полости, привод узла 10 для разрезания брющной полости при обработке рыбы на тушку, приводы щеток 7 и 11 для зачистки брющной полости и привод узла 13 для филетировкн. Ввод в действие необходимой совокупности механизмов производится установкой переключателя 53 режима работы (см. фиг. 5) в соответствующее положение. При этом сигнал «пуск направляется по нужному каналу. Команда на включение приводов должна запоминаться до момента поступления команды «остановка конвейера либо команды «стоп, либо сигнала от защиты. Команда на включение РВПЛ запоминается до момента подачи команды «стоп либо сигнала от защиты. Поскольку в момент включения питания все триггеры, находящиеся в схеме устройства, устанавливаются в произвольное состояние, то необходим предварительиый сигнал «сброс. Этот сигнал формируется при появлении сигнала У2- Длительность его определяется временем, необходимым для опрокидывания триггеров. После того как рыба подана на работающий конвейер, производится ее обмер в датчике 20 для измерения основных геометрических размеров рыбы. Сигнал от датчика поступает в вычислительное устройство 19 на вход запоминающей ячейки 72 и затем на операпионный усилитель 75, который вычисляет требуемую величину перемещения рабочего органа. Аналоговый сигнал с усилителя преобразуется с помощью преобразователя 78 по команде запуска УЬ поступающей с блока пуска 22, в число импульсов. Счетчик 79 служит для подсчета числа импульсов с преобразователя 78. Результат подсчета выдается в виде двоичного параллельного кода Ui. Состав и размер кода зависит от настроек соответствующих операционных усилителей. Для определенного вида рыбы и определенной операции будут конкретные настройки, обусловленные зависимостями длины головы, угла поворота для экономического реза брющной полости и т. п. от базовых размеров рыбы - (длины, толщины, ширины). Таким образом, по результатам измерений в ВУ 19 производится расчет настроечных параметров для каждой настраиваемой операции по данной рыбе. Эти настроечные параметры в двоичных параллельных кодах от Ui до /74 поступают в блок памяти. По окончании каждой из операций обработки рыбы сигналом сброса Zi осуществляется разряд емкости С с помощью замыкающего контакта реле 74 и возвращение преобразователя 78 и счетчика 79 в исходное нулевое состояние. Значение параметра для первой операции обезглавливания рыбы в виде кода Ui поступает на первый ряд однотипных узлов 80 (фиг. 8)... для четвертой онерации - на четвертый ряд. При наличии импульса записи (ИЗ), вырабатываемого коммутатором 16 на входе соответствующего узла (например, первого узла), конъюнкторы 85 пропускают информацию IJi и триггеры 83 ее запоминают. Считывание информации производится в тот момент, когда данная рыба подается к очередной операции. При приходе из коммутатора 17 импульса считывания ИС на выходе триггера 84 появляется сигнал, и конъюнктор, соединенный с этим триггером, пропускает импульсы Т, вырабатываемые генератором импульсов 82. Эти импульсы пропускают до тех пор, пока не появится запрещающий сигнал на входе триггера 84. Этот момент будет соответствовать окончанию процесса вычитания в счетчике, т. е. появлению нулевых сигналов на прямых выходах триггеров 83. Следовательно, на выходе Wt появится последовательный код, преобразованный из параллельного Ui, число импульсов этого кода будет пропорционально размеру рыбы, закодированному в ВУ 19. Импульсы Wi через дизъюнктор 81 поступают в блок управления исполнительными механизмами на коммутатор щагового двигателя 94 и вызывают вращение шагового двигателя в направлении «вперед. Одновременно потенциальный сигнал W с выхода триггера 84 через дизъюнктор в блоке памяти в виде сигнала W поступает на вход инвертора 90 и запрещает формирование импульсов «назад. Угол поворота ротора шагового двигателя в направлении «вперед пропорционален числу импульсов Wi. Это соответствует такому суммарному углу поворота вала двигателя, при котором механизм перемещения подвигает рыбу так, что край жаберных крышек располагается в плоскости узла 4 для обезглавливЪния рыбы. После исчезновения импульсов Wi, а следовательно, и сигнала Wj с выдержкой времени, обусловленной элементом задержки 91 и зависящей от времени, необходимого для осуществления данной технической операции, начинает пропускать импульсы Т конъюнктор 92. Это вызывает обратное вращение щагового
двигателя до момента срабатывания конечного выключателя 93, фиксирующего исходное положение механизма.
Обезглавленная рыба накалывается иглой, расположенной на конвейере 2, и перемещается к следующей операции. Если программой предусмотрена разделка рыбы на филе, то из блока памяти 18 поступает сигнал на двигатель, связанный с механизмом перемещения узла 5 (или 8). Последние перемещаются на необходимое расстояние от края конвейера 2 и поворачивают рыбу па такой угол, при котором дисковый нож узла 6 (или 9) подрезает верхнюю часть брюшины наиболее экономичным резом (или отрезает брюшную полость) .
После того как информация будет считана сданного однотипного узла памяти, для освобождения места, для записи вновь поступающей информации о следующей рыбе подается сигнал «С «сброс, формируемый блоком пуска.
Импульсы «запись, «считывание формируются следующими блоками: «запись - генератором тактовых импульсов (ГТИ) и коммутатором, считывание - коммутатором.
Включение питания на ГТИ 15 производится при поступлении сигнала о наличии рыбы из датчика линейных размеров 20 в блок пуска посредством сигнала , отключение ГТИ осуществляется сигналом Z, т. е. «стоп или «защита, поступающим в блок пуска.
Работой генератора 15 тактовых импульсов управляет датчик 14, связанный с валом приводного двигателя конвейера 2 и выдающий импульсы в фиксированные моменты времени. Продолжительность паузы между двумя импульсами плюс длительность сигнала с датчика 14 равняется времени, за которое конвейер проходит расстояние, равное длине одной ячейки для размещения рыбы.
Импульсы с выхода датчика 14 поступают на распределитель 26. При приходе первого импульса на первом выходе распределителя появляется сигнал, формирующий на выходе ГТИ сигнал «запись.
При приходе второго импульса на втором выходе ГТИ появляется сигнал 36. Он же повторяется и на первом выходе и т. д. Пятый сигнал 39 повторяется на всех выходах ГТИ.
Для дальнейшей работы ГТИ требуется запоминание пятого сигнала. Он запоминается до прихода команды «стоп либо сигнала от защиты, т. е. появления сигнала Z).
Подача импульсов с датчика 14 на распределитель происходит до поступления пятого импульса. Начиная с пятого импульса, он подается с датчика 14 непосредственно на объединенный вход дизъюнкторов 29.
Комментаторы 16 и 17, например, для первой настроечной операции работают следующим образом.
Запись информации в блок памяти 18 происходит с помощью сигналов И2 и Я32, формирЗемых в коммутаторе, при выполнении следующих условий: данная настроечная операция входит в этот вид обработки (сигналы ) и команда «занись, подаваемая на ГТИ и дублируемая сигналами ЯЗ и ЯЗг из распределителя 44 коммутатора 16. Записанная информация считывается из блока памяти при появлении сигнала 36 с помощью сигналов //Ci и ИСч коммутатора 17.
Сброс информации в блоке памяти производится сигналами С и Са, которые формируются в блоке пуска и являются сигналами
ЯС и ЯС2, задержаппыми на время, необходимое для считывания информации, в блоке 23 временных задержек.
Работа коммутаторов для остальных настроечных операций происходит аналогично.
При нажатии на кнопку «стоп все привода останавливаются.
При нажатии на кнопку «остановка конвейера выключаются только привода транспортирующего органа 1 и конвейера.
Формула изобретения
Рыборазделочная машина, содержащая
транспортирующий орган для рыбы, накалывающий конвейер, операционные механические узлы: отрезания головы, подрезания брюшной нолости, зачистки брюшной полости, отрезания брюшной полости с остатками внутренностей, разрезания и зачистки брюшной полости при обработке рыбы на тушку, филетировки, перемещения рыбы на экономичный рез головы, узел разворота рыбы на экономичный подрез брюшной полости при разделке рыбы
с сохранением икры и печени, узел разворота рыбы при разделке ее на тушку или филе, узел сброса тушки и датчик линейных размеров рыбы, отличающаяся тем, что, с целью повышения выхода готовой продукции
нри разделке различных пород рыб, улучшения качества продукции, она донолнительно снабжена вычислительным устройством, датчиком генератора тактовых импульсов, коммутаторами и блоками управления питания,
временных задержек, управления исполнительными механизмами и блоком памяти, соединенным с вычислительным устройством, подключенным к датчику линейных размеров рыбы, при этом выход датчика генератора
тактовых импульсов связан посредством генератора тактовых импульсов с коммутаторами, подключенныл1и к блоку памяти и блоку временных задержек, выход которого соединен с блоком пуска, а блок управления исполнительными механизмами подключен к блоку памяти и операционным механическим узлом. Литература: Патент 53088, ПНР, кл. 34/ 15/01.
УгП
-н /
---dLEiii:
;7
.-II
/5 b535f
ав
о5
//f
От а7лчука. -.
,Ы52
ЛЗЗ|
II
Уз
71 2о I
11
ii
„Запись
т
36
37
38
39
Lbiilbij
Фш.2
„Запись
1//3
/5
//З.
z,
ж 43
Г
I (//3;;
47
/5
ИЪ
5 - - J
Фиг.З
ia
36
50
37
57
2б
L
Cjo
Л ,г
5 ИС13.
JiCn
М.
52
ис,
S
„луск
.BcrnoffoeKa, /fOHSeOepa
лСтоп
нЗащата j-
рыоы
am JUTP
ycm/JHoSffa на}фф Л/1 ен7па. „ A
1
iloma/ oSf o (VfffJma „B
U-JL
1
v, .г
fйД 7
ИЗ
/о
//3;
чьш.
Г разряЗ
Лопераг ия
