Область технического применения
[1] Настоящее изобретение относится к системе автоматического управления транспортным средством, в частности, к системе автоматического управления автомобилем, при которой водитель задает место назначения в системе навигации, а автомобиль переходит в режим автоматического управления до заданного места назначения с учетом сигналов светофоров, а также находящихся рядом транспортных средств и объектов.
Предшествующий уровень развития техники
[3] При введении водителем определенных параметров скорости движения стандартная система автоматического управления обеспечивает поддержание заданной скорости, пока водитель не начнет использовать педаль акселератора. Такая система автоматического управления обычно называется автоматическим управлением, автоматикой, круиз контролем и т.п.
[4] Вышеописанная система автоматического управления контролирует скорость движения автомобиля и расстояние до находящегося впереди другого автомобиля. Определяя данное расстояние, датчик управляет дроссельной заслонкой и тормозной системой при помощи бортового компьютера, обеспечивая безопасное управление за счет поддержания безопасного расстояния между автомобилями.
[5] При введении водителем определенных параметров скорости движения, на трассе с высокой разрешенной скоростью движения, управление автомобилем обеспечивается на заданной скорости. При этом водитель не использует педаль акселератора, что обеспечивает значительно меньшую утомляемость водителя.
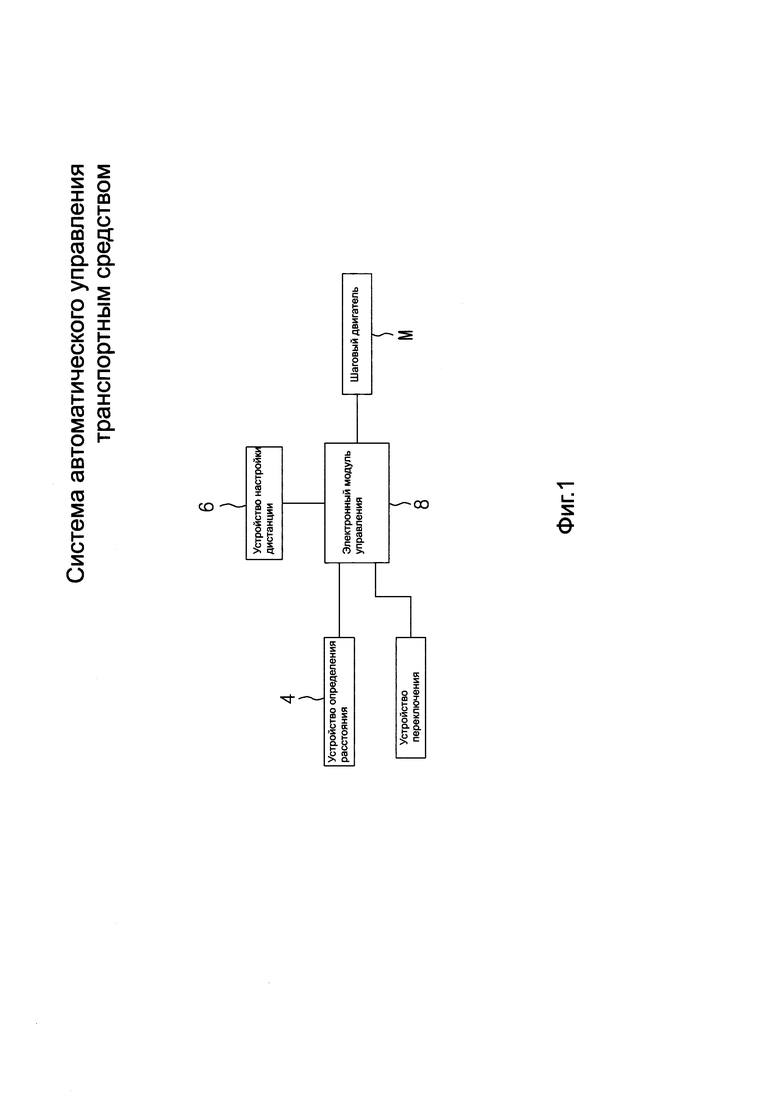
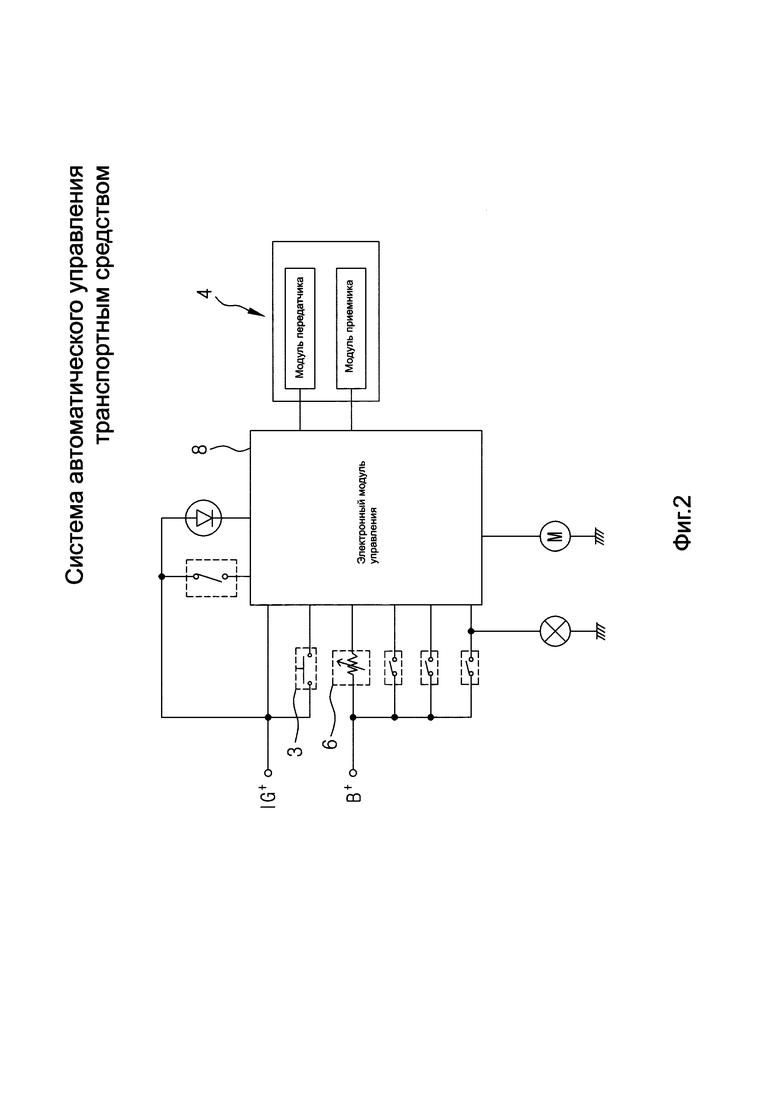
[6] Как показано на Фигурах 1 и 2, зарегистрированный корейский патент номер 10-0180496 описывает технологию применения такой системы автоматического управления в качестве примера. Технические характеристики системы приведены ниже. Система автоматического управления позволяет водителю управлять автомобилем на заданной скорости с возможностью переключения на ручной или автоматический режим управления; система укомплектована устройством переключения с функцией выбора определенного автомобиля среди движущихся впереди автомобилей; система укомплектована устройством определения расстояния 4, служащим для определения дистанции до движущегося впереди автомобиля при помощи приемопередатчика, который определяет дистанцию до выбранного устройством переключения автомобиля; система укомплектована устройством настройки дистанции 6 для ввода параметров расстояния до выбранного устройством переключения автомобиля пропорционально скорости автомобиля; система укомплектована электронным модулем управления 8 для подачи сигнала ускорения или замедления с целью контроля безопасной дистанции до движущегося впереди автомобиля в соответствии с сигналом устройства определения расстояния 4 и сигналом устройства настройки дистанции 6; система укомплектована шаговым двигателем «М» для контроля безопасной дистанции до движущегося впереди автомобиля путем управления акселератором двигателя в соответствии с сигналом, подаваемым электронным модулем управления 8.
[7] Описанная в зарегистрированном корейском патенте номер 10-0180496 технология имеет преимущество, выраженное в возможности водителя управлять автомобилем на заданной скорости при сохранении безопасной дистанции до движущегося впереди автомобиля путем ускорения и замедления движения при одновременном снижении утомляемости водителя; тем не менее, доступен только контроль скорости движения без возможности рулевого управления автомобилем. Следовательно, водитель все равно осуществляет рулевое управление автомобилем, что приводит к его утомляемости.
Описание изобретения
[9] Соответственно, настоящее изобретение служит для разрешения вышеописанной проблемы. Объектом настоящего изобретения является система автоматического управления автомобилем, которая позволяет водителю задавать место назначения при помощи устройства навигации, после чего модуль маршрутизации, установленный в системе, получает информацию о маршруте, направлении и угле поворота согласно текущим данным измерений, формирует и определяет полосу движения, а модуль управления движением позволяет управлять акселератором, тормозной системой и системой рулевого управления в соответствии с полосой движения для автоматического движения автомобиля к заданному месту назначения.
[10] Другим объектом настоящего изобретения является комплектация системы автоматического управления автомобилем модулем управления движения, использующим данные автоматического управления автомобилем для обеспечения точного расположения каждого колеса и угла поворота колес при помощи рулевой системы управления с учетом размера колес, чтобы автомобиль точно двигался по заданной полосе движения согласно модулю маршрутизации.
[11] Следующим объектом настоящего изобретения является комплектация системы автоматического управления автомобилем модулем безопасности движения с беспроводным приемником для получения в режиме реального времени сигналов каждого светофора и определения их значения для обеспечения движения автомобиля в соответствии с сигналами и безопасного управления автомобилем на перекрестке, пешеходном переходе и т.п.
[12] Следующим объектом настоящего изобретения является комплектация системы автоматического управления автомобилем модулем маршрутизации, с возможностью его настройки и внесения данных о ширине и количестве полос движения, а также определения основной полосы движения, по которой будет двигаться управляемый автомобиль, и дополнительной полосы движения с возможностью беспрепятственного перехода на другую полосу и обратно.
[13] Еще одним объектом настоящего изобретения является комплектация автоматической системы управления автомобилем модулем определения положения, служащим для точного определения полосы движения с целью обеспечения максимальной точности управления автомобилем. Данные о полосе движения, по которой двигался автомобиль, и изображение, зафиксированное камерой, сохраняются в архиве данных. Если автомобиль в другое время опять движется по той же полосе движения, сохраненные данные сравниваются с текущим изображением для обеспечения максимальной точности управления автомобилем.
[16] Для решения вышеописанных задач автоматическая система управления автомобилем должна быть укомплектована, в частности, но без ограничений, модулем маршрутизации, который получает информацию о маршруте, заданную в установленном устройстве навигации, и преобразует данные о расстоянии, направлении и угле поворота согласно текущим данным измерения и направляет на определенную полосу движения, а также модулем управления движением, который обеспечивает возможность управления автомобилем, двигающимся по полосе движения, заданной модулем маршрутизации.
[17] Модуль управления движением конфигурируется так, чтобы сохранять данные о положении каждого колеса автомобиля, угле поворота каждого колеса при применении системы рулевого управления, и диаметре каждого колеса.
[18] Модуль управления движением конфигурируется для управления двигателем, тормозной системой и системой рулевого управления в соответствии с данными управляемого автомобиля, двигающегося по полосе движения при помощи установленного на автомобиле ECU (Электронного Блока Управления).
[19] Предусмотрен модуль корректировки ошибок, служащий для корректировки полосы движения, с учетом текущего положения автомобиля, данные о котором получены от устройства навигации при сравнении текущего положения автомобиля с положением на полосе движения.
[20] Предусмотрен модуль безопасности движения, служащий для предотвращения любых внештатных ситуаций, с функцией определения находящихся рядом автомобилей и предметов при помощи датчиков определения расстояния, установленных спереди, сзади и по бокам автомобиля.
[21] Модуль безопасности движения укомплектован беспроводным приемником, получающим данные о светофорах от беспроводных передатчиков, установленных на светофорах, расположенных на перекрестках и пешеходных переходах.
[22] При введении данных о полосе движения модуль маршрутизации одновременно получает данные о перекрестках, пешеходных переходах, туннелях, светофорах, ограничениях скорости на дорогах и индивидуальной частоте передачи данных каждого светофора.
[23] Модуль маршрутизации конфигурируется для сохранения информации о ширине и количестве полос движения каждой дороги, по которой двигается управляемый автомобиль, и определения основной полосы движения, по которой будет двигаться управляемый автомобиль, и дополнительной полосы движения с возможностью беспрепятственного перехода на другую полосу и обратно.
[24] Дополнительно предусмотрен модуль контроля полосы движения, служащий для определения полосы движения, от которой не должен отклоняться автомобиль.
[25] Модуль контроля полосы движения может включать в себя, но не ограничиваться им, модуль обработки изображения, который служит для обработки изображений, передаваемых камерой, установленной в передней части транспортного средства, а также модуль определения полосы движения, который служит для определения каждой полосы движения путем анализа и обработки образца (модели) каждой полосы движения, изображение которой обработано модулем обработки изображения.
[26] В дополнение, модуль контроля полосы движения может включать в себя, но не ограничиваться им, модуль обработки изображения, который служит для обработки изображений, получаемых с камеры, установленной в передней части транспортного средства, а также модуль определения полосы движения, который служит для определения каждой полосы движения путем анализа образца соответствующей полосы движения по изображению, которое обработано модулем обработки изображения.
[27] Дополнительно предусмотрен модуль определения положения, служащий для определения положения автомобиля, который позволяет определять полосу движения на дороге на основании данных, полученных при помощи модуля обработки изображения и модуля определения полосы движения.
[28] Кроме того, модуль определения положения, служащий для определения положения автомобиля, может быть укомплектован первым приемопередатчиком, служащим для передачи и получения высокочастотного сигнала. На каждой стороне дороги предусмотрена установка второго приемопередатчика для получения сигнала от первого приемопередатчика и передачи сигналов при помощи расположенных на расстоянии друг от друга устройств второго приемопередатчика. Модуль определения положения определяет полосу движения, на которой находится двигающийся по дороге автомобиль, используя данные о расстоянии между обочинами дороги и данные о ширине полосы движения, на основании сигналов, полученных от первого и второго приемопередатчиков.
[29] Предусмотрен модуль определения состояния дороги, служащий для определения состояния поверхности дороги. Данный модуль определяет возможное наличие трещин и выбоин на поверхности дороги, анализируя изображение, полученное камерой, установленной в транспортном средстве.
[30] Дополнительно предусмотрен модуль архивирования данных о полосе движения, который служит для хранения данных о полосе движения, по которой двигался автомобиль, и изображений, полученных камерой, установленной в транспортном средстве. Полученное изображение сравнивается с положением полосы движения.
[31] При этом если автомобиль двигается по дороге, по которой передвигался ранее, то при управлении автомобилем соответствующее изображение, сохраненное в модуле архивирования данных, сравнивается с текущим изображением, получаемым от камеры.
[32] Беспроводной приемник получает географические данные о местах стоянки автотранспорта от беспроводных приемопередатчиков, установленных на местах стоянки автотранспорта, а также о месте парковки автомобиля, а модуль маршрутизации формирует подробные данные о полосе движения для движения и парковки автомобиля на месте стоянки, с учетом текущего положения автомобиля.
[33] Модуль определения положения служит для определения положения автомобиля. Он укомплектован первым приемопередатчиком для приема и передачи высокочастотного сигнала. На краю места стоянки автотранспорта установлен третий приемопередатчик для получения сигнала от первого приемопередатчика и передачи сигнала. Модуль определения положения определяет положение автомобиля по крайнему сектору места стоянки при помощи сигналов, полученных от первого и третьего приемопередатчиков, с учетом географических данных места стоянки автомобилей.
[34] При определении текущего сигнала, изображение светофора выделяется из общего изображения, получаемого установленной на автомобиле камерой, и сравнивается с образцом изображения светофоров, сохраненным в модуле управления движением.
Преимущества системы
[36] В соответствии с настоящим изобретением, водитель задает место назначения при помощи устройства навигации, и встроенный в систему модуль навигации прокладывает маршрут с учетом текущих данных управляемого автомобиля, определяя и формируя полосу для движения. Модуль управления движением позволяет управлять движением автомобиля по данной полосе движения за счет управления акселератором, тормозной системой и системой рулевого управления автомобиля. Движением автомобиля можно управлять в автоматическом режиме до места назначения.
[37] Модуль управления движением, установленный в системе автоматического управления, которая является предметом настоящего изобретения, может хранить информацию об угле поворота каждого колеса в системе рулевого управления и размере каждого колеса, для обеспечения точности управления движением автомобиля по полосе движения, определенной модулем маршрутизации.
[38] В соответствии с настоящим изобретением, модуль безопасности движения укомплектован беспроводным приемником, получающим сигнал от каждого светофора в режиме реального времени, для обеспечения движения автомобиля в соответствии с сигналами и для безопасного проезда перекрестков и пешеходных переходов.
[39] При настройке модуля маршрутизации задаются данные о ширине и количестве полос движения на дороге, по которой будет двигаться автомобиль, для определения основной полосы движения, по которой будет двигаться управляемый автомобиль, и дополнительной полосы движения с возможностью беспрепятственного перехода на нее и обратно.
[40] В соответствии с настоящим изобретением, система автоматического управления укомплектована модулем определения положения, который точно определяет полосу движения, на которой находится автомобиль, с целью обеспечения точности управления автомобилем. Устройство архивирования данных о полосе движения служит для хранения данных о полосах движения, по которым двигался автомобиль, и изображений, полученных камерой. При повторном движении автомобиля по полосе движения, архивированные данные и текущие изображения сравниваются для обеспечения более точного управления автомобилем.
Краткое описание чертежей
[42] Фигура 1: блок-схема стандартной системы автоматического управления автомобилем.
[43] Фигура 2: принципиальная схема стандартной системы автоматического управления автомобилем.
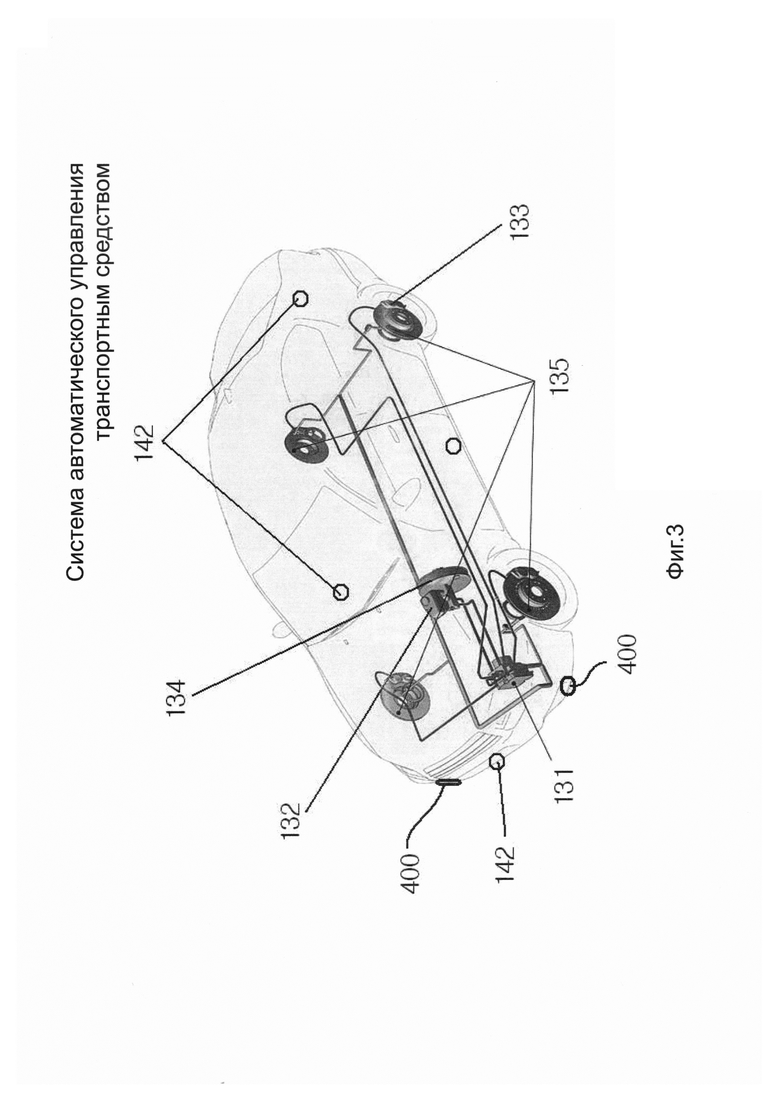
[44] Фигура 3: схематический чертеж автомобиля, система автоматического управления которого применяется согласно настоящему изобретению.
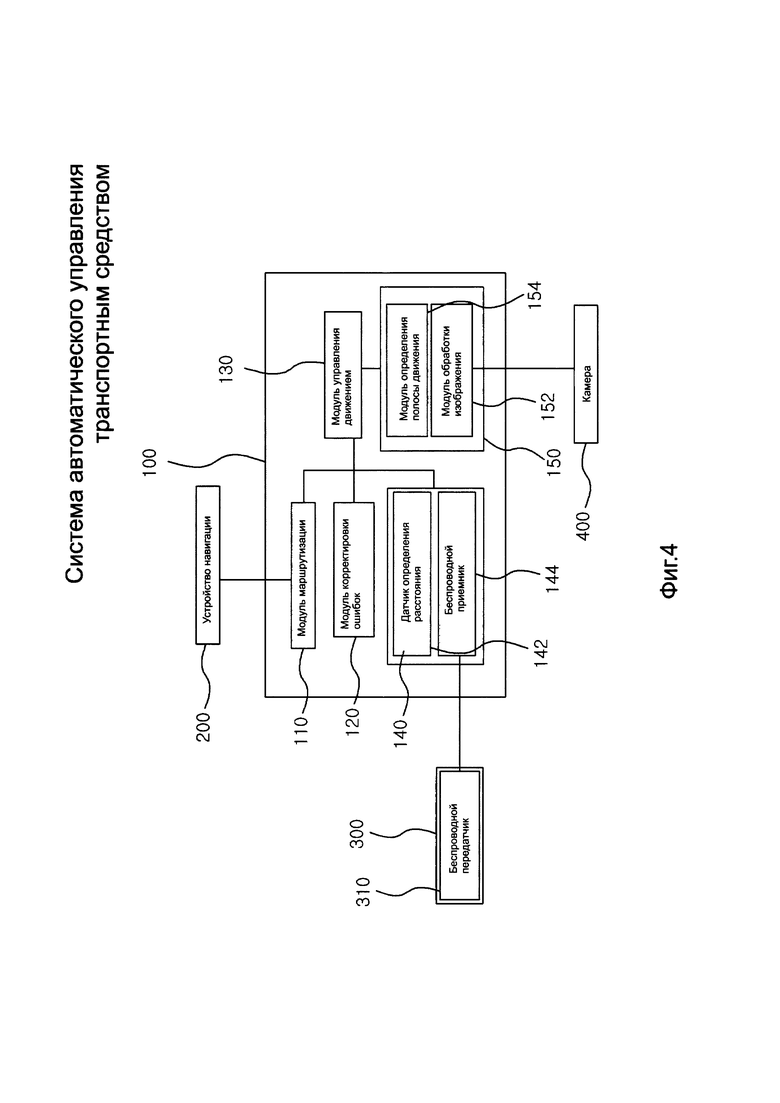
[45] Фигура 4: блок-схема стандартной системы автоматического управления автомобилем, применяемой согласно настоящему изобретению.
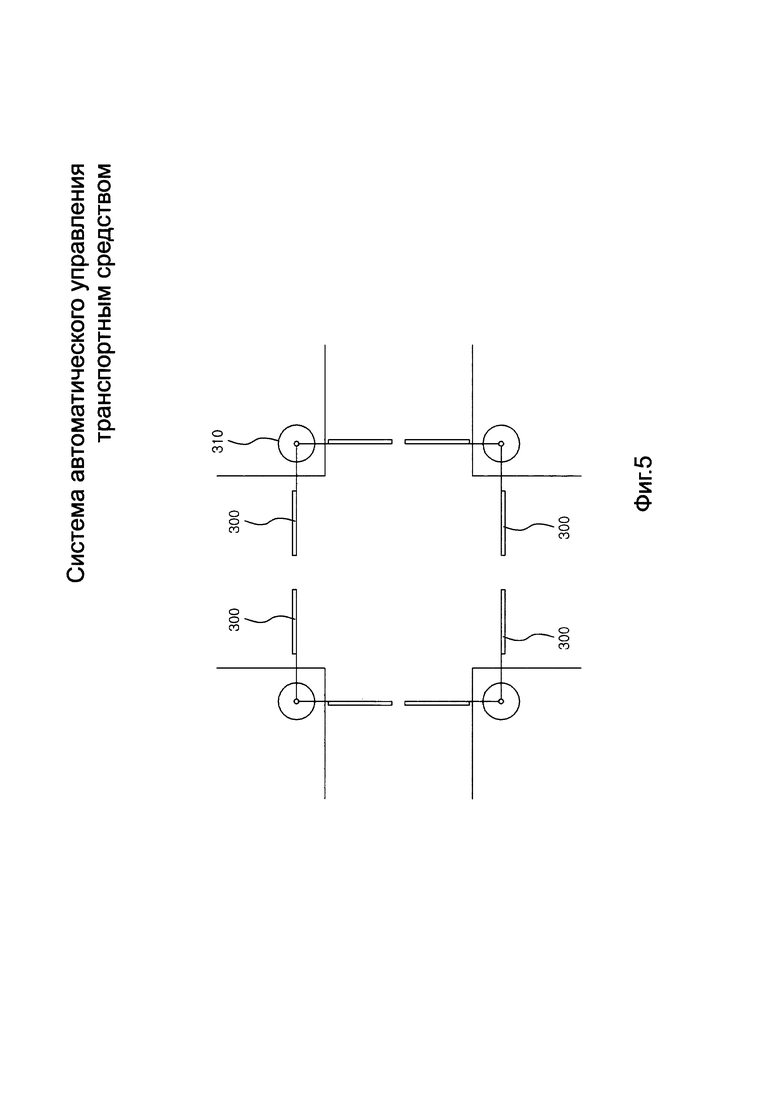
[46] Фигура 5: концептуальная схема системы светофоров, установленных на перекрестках, согласно настоящему изобретению.
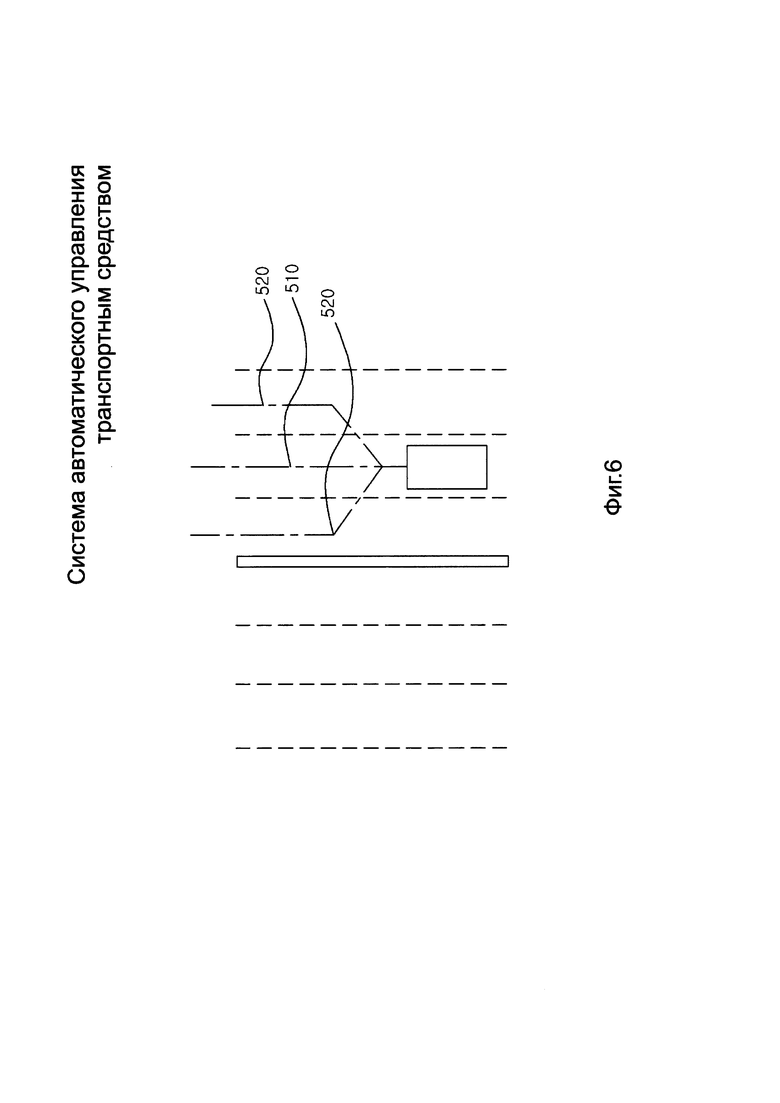
[47] Фигура 6: концептуальная схема полосы движения, сформированной модулем маршрутизации системы автоматического управления автомобилем согласно настоящему изобретению.
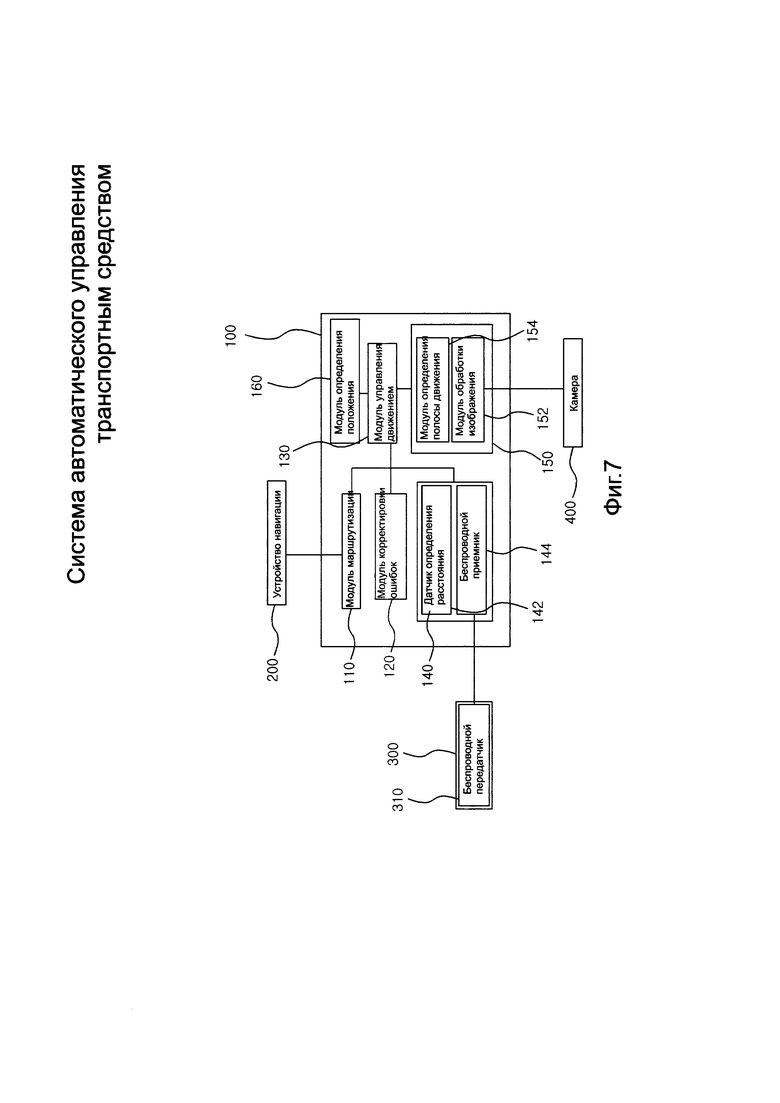
[48] Фигура 7: блок-схема системы автоматического управления автомобилем в соответствии с другим примером применения согласно настоящему изобретению.
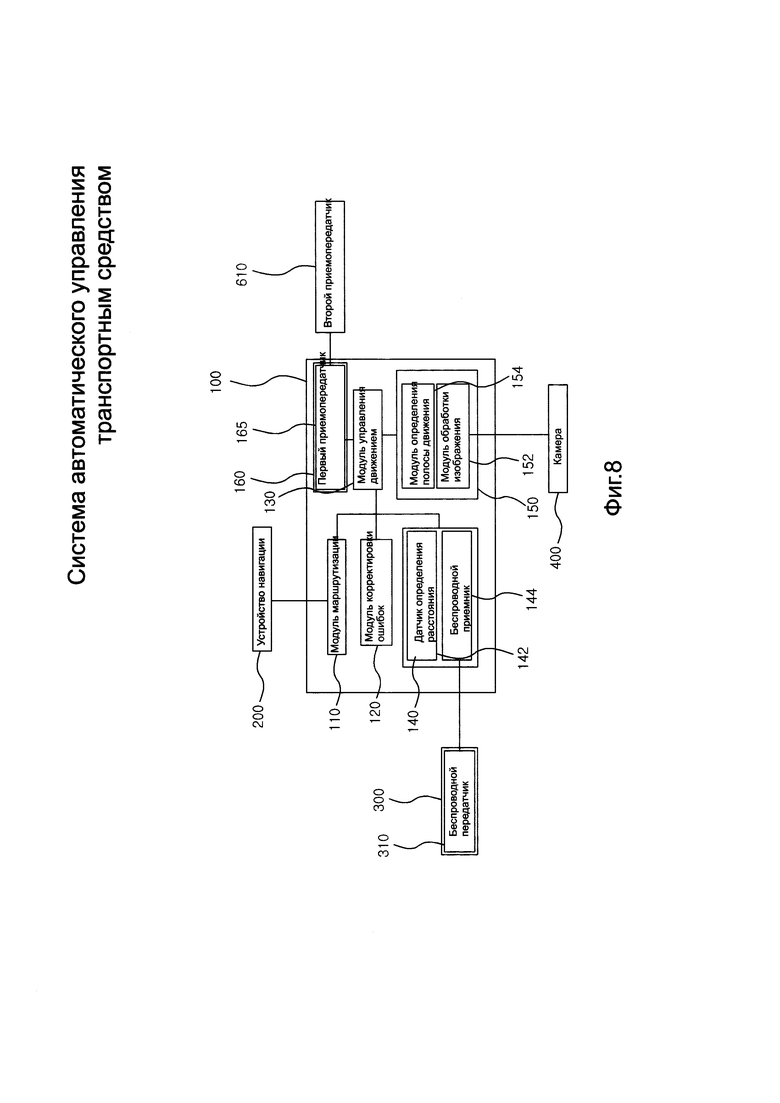
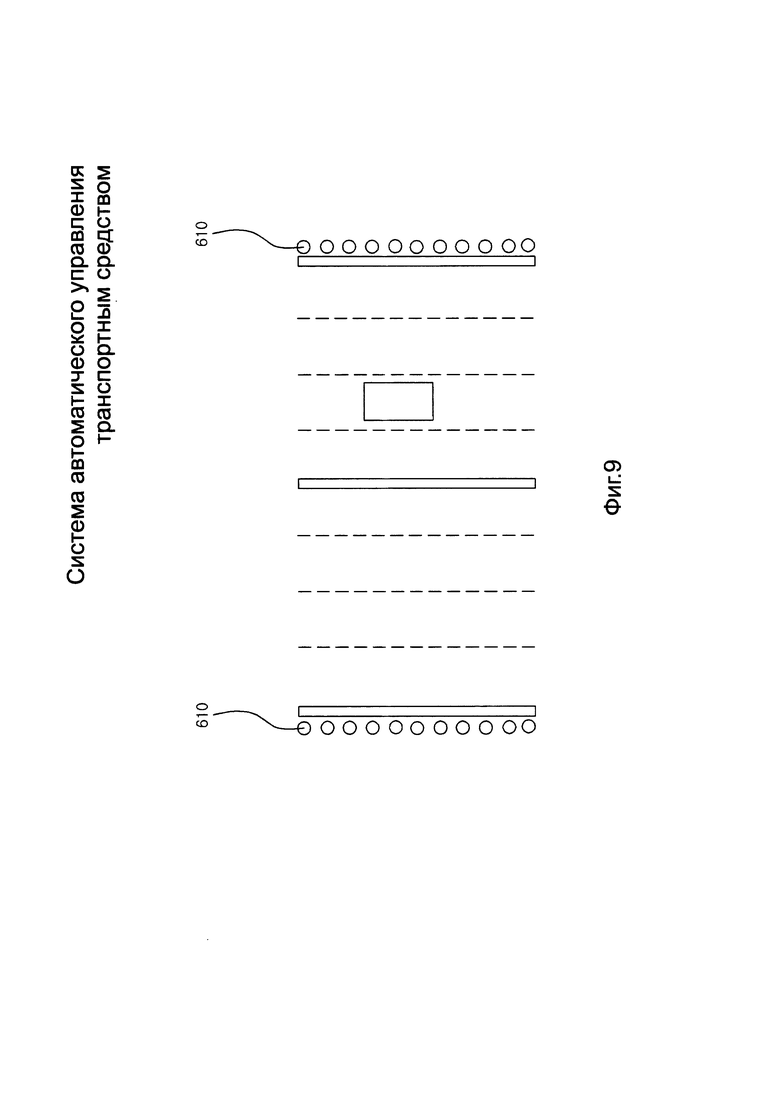
[49] Фигура 8: блок-схема системы автоматического управления автомобилем в соответствии с еще одним примером применения согласно настоящему изобретению.
[50] Фигура 9: концептуальная схема дороги согласно примеру, приведенному на Фигуре 8.
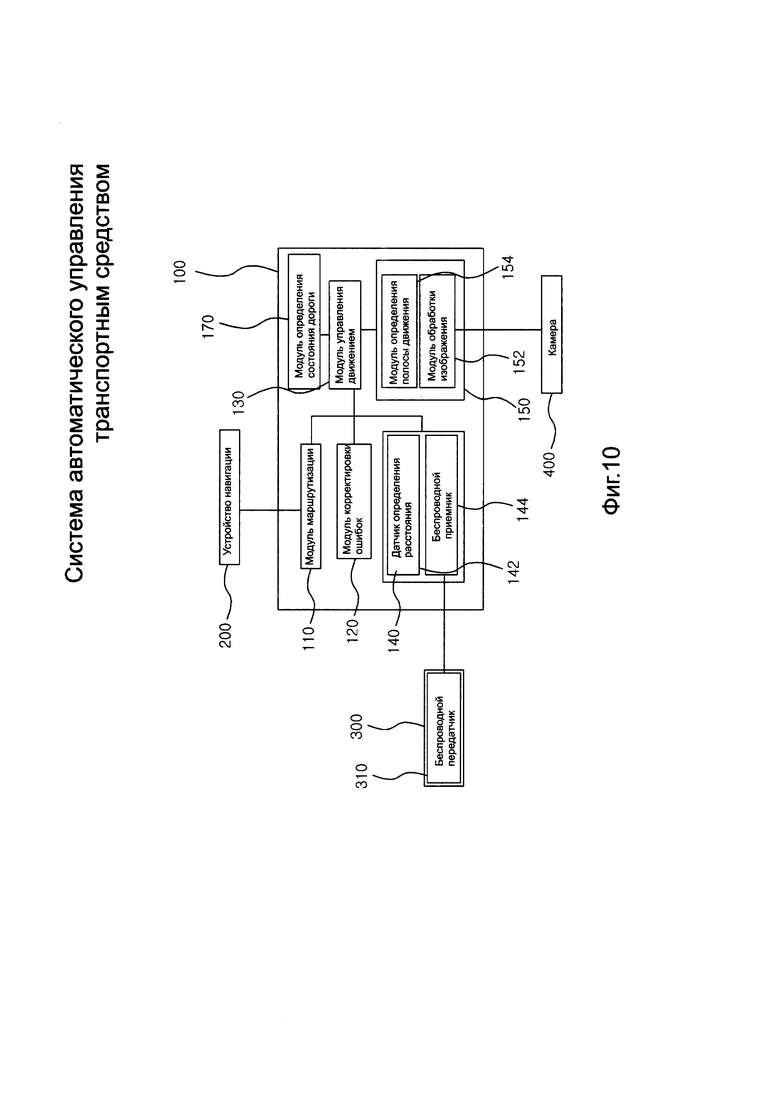
[51] Фигура 10: блок-схема системы автоматического управления автомобилем в соответствии с еще одним дополнительным примером применения согласно настоящему изобретению.
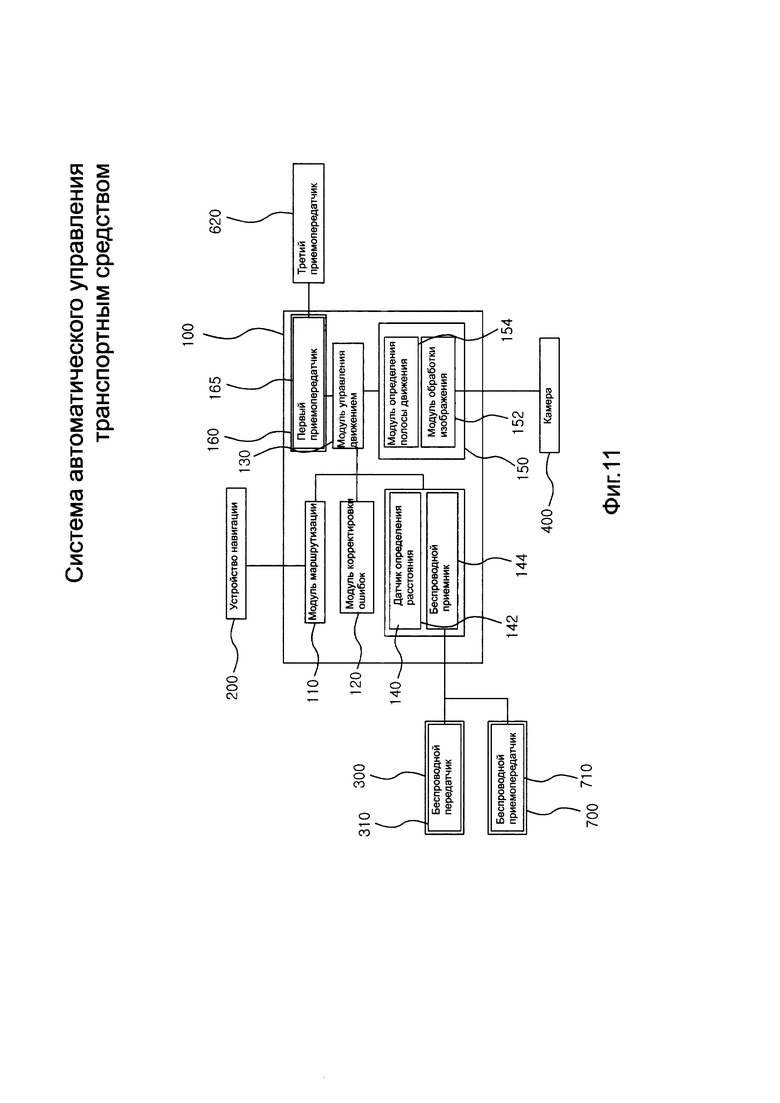
[52] Фигура 11: блок-схема системы автоматического управления автомобилем в соответствии с еще одним дополнительным примером применения согласно настоящему изобретению.
Основные примеры применения изобретения
[54] Примеры применения настоящего изобретения приводятся в сопровождении соответствующих чертежей. Одинаковые компоненты, приведенные на чертежах, имеют одинаковые номера позиций. Повторяющиеся описания не включены. Необходимо понимать, что настоящее изобретение может применяться в различных аспектах и не ограничивается приведенными описаниями.
[56] На Фигуре 3 приведен схематический чертеж автомобиля, система автоматического управления которого применяется согласно настоящему изобретению. Фигура 4 представляет собой блок-схему стандартной системы автоматического управления автомобилем, применяемой согласно настоящему изобретению. На Фигуре 5 приведена концептуальная схема системы светофоров, установленных на перекрестке согласно настоящему изобретению. Фигура 6 представляет собой концептуальную схему полосы движения, сформированной модулем маршрутизации системы автоматического управления автомобилем согласно настоящему изобретению. На Фигуре 7 приведена блок-схема системы автоматического управления автомобилем в соответствии с другим примером применения согласно настоящему изобретению. На Фигуре 8 приведена блок-схема системы автоматического управления автомобилем в соответствии с еще одним примером применения согласно настоящему изобретению. Фигура 9 представляет собой концептуальную схему дороги согласно примеру, приведенному на Фигуре 8. Фигура 10 представляет собой блок-схему системы автоматического управления автомобилем в соответствии с еще одним дополнительным примером применения согласно настоящему изобретению. Фигура 11 представляет собой блок-схему системы автоматического управления автомобилем в соответствии с еще одним дополнительным примером применения согласно настоящему изобретению.
[58] Настоящее изобретение описывает систему автоматического управления, установленную на автомобиль, обеспечивающую автоматическое управление автомобилем при его движении к месту назначения. Как показано на Фигурах 3 и 4, она может быть укомплектована устройством автоматического управления 100, обеспечивающим контроль над автомобилем. Устройство автоматического управления 100 может быть укомплектовано, в частности, но не ограничиваясь им, модулем маршрутизации 110, модулем корректировки ошибок 120, модулем управления движением 130 и модулем безопасности движения 140.
[59] Модуль маршрутизации 110 конфигурируется путем введения данных от текущего положения автомобиля до места назначения, которые пользователь задает при помощи устройства навигации 200, установленного на автомобиле, для формирования полосы движения, по которой будет двигаться автомобиль. Полоса движения определяется на основании данных о расстоянии, направлении и угле поворота согласно текущим данным измерения.
[60] Модуль управления движением 130 конфигурируется для управления движением автомобиля по полосе движения, сформированной модулем маршрутизации 110. Модуль управления движением 130 управляет двигателем 132, тормозной системой 133 и системой рулевого управления 134 при помощи ECU (Электронного Блока Управления) 131, установленного в автомобиле.
[61] Кроме того, модуль управления движением 130 сконфигурирован с возможностью сохранения данных о положении каждого колеса автомобиля, угле поворота каждого колеса при применении системы рулевого управления 134 и диаметре каждого колеса. При движении автомобиля по определенной для него полосе движения управление производится с учетом известных данных об автомобиле.
[62] При управлении автомобилем, двигающимся по извилистой дороге, система рулевого управления 134 обеспечивает поворот автомобиля в соответствии с полосой движения. При осуществлении поворота рулевой системой управления 134 передние колеса автомобиля поворачиваются под определенным углом. Так как передние и задние колеса автомобиля находятся на расстоянии друг от друга, радиус поворота изменяется в зависимости от этого расстояния. Данное изменение рассчитывается, а рулевая система управления контролируется так, чтобы поворот передних колес соответствовал радиусу поворота полосы движения.
[63] При управлении системой рулевого управления 134 поворот контролируется двигателем (не показан на чертежах), который устанавливается в системе рулевого управления 134. Двигатель (не показан на чертежах) укомплектован кодирующим устройством (не показано на чертежах), которое позволяет ECU 131 определять угол поворота для двигателя (не показан на чертежах). Угол поворота системы рулевого управления 134 точно контролируется путем точного управления вращением двигателя (не показан на чертежах) при помощи ECU (Электронного Блока Управления) 131.
[64] Датчик определения поворота 135 установлен на узле крепления колеса на автомобиль. Модуль управления движением 130 рассчитывает окружность колеса с учетом его диаметра и умножает полученное значение на значение оборотов вращения колеса, определенное датчиком определения вращения 135, получая, таким образом, значение расстояния, на котором колесо подлежит управлению в данный момент.
[65] С этой целью, можно определить текущее положение автомобиля на полосе движения, сформированной модулем маршрутизации 110.
[66] При определении полосы движения модулем маршрутизации 110 задаются данные перекрестков, пешеходных переходов, туннелей, светофоров и ограничений скорости на дороге. Модуль управления движением 130 умножает значение окружности колеса на значение вращения за единицу времени, определенную датчиком определения вращения 135, получая, таким образом, значение скорости автомобиля. Скорость автомобиля повышается и снижается при помощи двигателя 132, установленного на автомобиле, с учетом регулировки скорости движения по текущей дороге на основании рассчитанного значения.
[67] При необходимости срочного снижения скорости автомобиля применяется торможение при помощи управляемой тормозной системы 133 в аварийной ситуации.
[68] При управлении автомобиля на заданном расстоянии система автоматического управления 100 контролирует движение автомобиля, но определенная ошибка неизбежно возникает, даже при максимально точном управлении. Для корректировки данных ошибок используется модуль корректировки ошибок 120.
[69] Модуль корректировки ошибок 120 конфигурируется для получения данных о текущем положении автомобиля в режиме реального времени от устройства навигации 200, и его положение на полосе движения автоматически контролируется модулем управления движением 130 путем сравнения данных о текущем положении автомобиля, полученных от устройства навигации 200. Если ошибка выходит за пределы допустимой погрешности, модуль корректировки ошибок 120 корректирует полосу движения с учетом текущего положения автомобиля, данные о котором получены от устройства навигации, корректируя, таким образом, ошибку.
[70] Таким образом, диапазон допустимой погрешности может задаваться водителем. Если задан слишком широкий диапазон допустимой погрешности, разница между текущим положением автомобиля и положением автомобиля для модуля управления движением 130 является значительной, что может привести к возникновению опасной ситуации. Если диапазон маленький, то возникает необходимость частой корректировки данных о полосе движения. В то время как полоса движения корректируется, функции остальных модулей ограничиваются после чего должен быть введен соответствующий диапазон допустимой погрешности для безопасного управления автомобилем.
[71] Модуль безопасности движения 140 позволяет управлять автомобилем без риска столкновения с другими автомобилями или объектами путем определения их местонахождения рядом с автомобилем.
[72] Датчики определения расстояния 142 устанавливаются спереди, сзади и по бокам автомобиля для определения местонахождения других автомобилей и объектов рядом с автомобилем и расстояния до них.
[73] Предпочтительнее устанавливать датчики определения расстояния 142 по диагонали, а не спереди, сзади и по бокам автомобиля, так как это позволяет более точно определять местонахождение других автомобилей и объектов в опасной близости от автомобиля, и обеспечивать безопасное управление автомобилем.
[74] Модуль безопасности движения 140 может быть укомплектован беспроводным приемником 144. Как показано на Фигуре 5, беспроводной приемник 144 конфигурируется для получения данных светофоров, передаваемых беспроводными передатчиками 310, установленными на светофорах 300, находящихся на перекрестках и пешеходных переходах.
[75] Следовательно, модуль безопасности движения 140 может передавать полученный от светофора сигнал на модуль управления движением 130 при управлении движением автомобиля с учетом данных светофора, что позволяет автомобилю осуществлять движение в соответствии с сигналами светофоров.
[76] При формировании полосы движения вышеописанным способом задаются данные перекрестков, пешеходных переходов и светофоров. При сравнении заданного положения управляемого автомобиля с положением относительно светофора 300, модуль безопасности движения 140 получает данные о частоте светофора, на которой беспроводной передатчик 310, установленный на соответствующем светофоре 300, осуществляет передачу сигнала, соответственно, установленный на автомобиле беспроводной приемник 144 получает сигнал на определенной частоте, во избежание возникновения помех со стороны других передатчиков, установленных на расположенных рядом светофорах 300.
[77] На одном перекрестке может быть установлено определенное количество светофоров 300. Они синхронно меняют свои сигналы, при этом сигналы всех светофоров, установленных на одном перекрестке, передаются одним беспроводным передатчиком 310.
[78] При передаче в режиме реального времени установленным на каждой светофоре беспроводным передатчиком 300 сигнала каждого светофора на специальной определенной частоте, модуль безопасности движения 140 получает соответствующий сигнал на определенной частоте светофора 300, данные которой архивированы (сохранены) среди данных полосы движения, а получение сигнала возможно только от соответствующего светофора 300.
[79] С этой целью, модуль управления движением 130 в режиме реального времени определяет сигнал светофора 300, обеспечивая безопасное управление автомобилем в соответствии с полученным сигналом.
[80] Модуль маршрутизации 110 может архивировать подробную информацию о каждой дороге. После того, как задана полоса движения, задаются данные о ширине и количестве полос движения на каждой дороге (проезжей части), по которой будет перемещаться автомобиль.
[81] При формировании полосы движения модулем маршрутизации 110, как показано на Фигуре 6, основная полоса движения 510 позволяет автомобилю двигаться непосредственно по одной из существующих на дороге полос движения, а дополнительная полоса движения 520 - по другим заданным полосам движения.
[82] Следовательно, если при движении по основной полосе движения 510 она вдруг оказывается заблокированной, либо на ней находится какое-либо препятствие, в качестве основной полосы движения выбирается ближайшая полоса движения 520, что позволяет максимально безопасно и беспрепятственно выбрать полосу движения.
[83] При выборе полосы движения необходимо проверить наличие других автомобилей рядом с управляемым автомобилем при помощи модуля безопасности движения 140, и изменить полосу движения.
[84] Кроме того, система автоматического управления 100 может быть дополнительно укомплектована модулем контроля полосы движения 150, который позволяет контролировать полосу движения так, чтобы автомобиль не отклонялся от полосы движения, по которой он двигается. Модуль контроля полосы движения 150 может быть укомплектован модулем обработки изображения 152, служащим для обработки изображений, полученных установленной спереди автомобиля камерой 400, и конфигурируется для анализа изображений, обработанных модулем обработки изображения 152, определяя полосу движения путем проведения сравнения с образцами других полос движения (центральная полоса движения, полоса движения автомобиля, обочина и т.п.), обеспечивая правильность положения автомобиля на полосе движения.
[85] Таким образом, определенные данные передаются модулю управления движением 130, который управляет движением автомобиля с возможностью незамедлительного возврата автомобиля в прежнее положение, если он ошибочно переместился на другую полосу движения, во избежание аварийного столкновения.
[87] Как показано на Фигуре 7, в соответствии с другим примером применения настоящего изобретения, система автоматического управления 100 может быть укомплектована модулем определения положения 160, служащим для определения текущего положения автомобиля. Модуль определения положения 160 определяет текущее положение автомобиля путем распознавания полосы движения среди изображений, полученных камерой, установленной спереди автомобиля.
[88] Камеру 400 можно установить в любой точке автомобиля, но предпочтительнее установить ее в верхней части автомобиля, чтобы она получала изображения во всех направлениях дороги и эффективно функционировала в обоих направлениях по ходу движения автомобиля.
[89] Модуль обработки изображения 152, установленный в модуле контроля полосы движения 150, конфигурируется для обработки изображений, полученных камерой 400. Модуль определения полосы движения 154 сравнивает полученные изображения с данными предварительно сохраненной информации о полосах движения, определяя, таким образом, полосы движения.
[90] В то же время, модуль определения положения 160 точно определяет полосу движения, по которой двигается автомобиль, при помощи данных о полосах движения, расположенных слева и справа от автомобиля, определенных модулем контроля полосы движения 150.
[91] Так как возможно определение положения автомобиля с большой точностью на основании данных навигации и данных управления автомобилем, в частности, данных о положении автомобиля и точных данных о полосе движения, на которой определяется положение автомобиля, при помощи модуля определения положения 150, то возможно обеспечение точности в управлении автомобилем.
[92] Кроме того, если оставшаяся конфигурация совпадает с описанной ранее конфигурацией, ее описание опускается.
[94] Как показано на Фигурах 8 и 9, в соответствии с другим примером применения настоящего изобретения, автоматическая система управления 100 может быть укомплектована модулем определения положения 160, служащим для определения текущего положения автомобиля. Модуль определения положения 160 конфигурируется для измерения расстояния от текущего положения автомобиля до края дороги, определяя, таким образом, положение автомобиля.
[95] Модуль определения положения 160 может быть укомплектован первым приемопередатчиком 165 для передачи и получения высокочастотного сигнала, при установке второго приемопередатчика на обочине дороги, по которой двигается автомобиль, для получения высокочастотного сигнала от первого приемопередатчика 165 и передачи ему сигнала.
[96] При этом, модуль определения положения 160 конфигурируется для расчета времени возврата сигнала первого приемопередатчика 165, чтобы рассчитать расстояние до второго приемопередатчика 610. Каждый второй приемопередатчик 610 имеет индивидуальный регистрационный номер. Имея возможность распознать сигнал каждого второго приемопередатчика 610, можно рассчитать расстояние до него.
[97] С этой целью, производится точный расчет данных местонахождения обоих краев дороги и положения автомобиля. Полоса движения с текущим положением на ней автомобиля определяется с учетом ширины полосы движения, данные которой хранятся в модуле маршрутизации 110, что позволяет уверенно управлять движением автомобиля.
[98] Второй приемопередатчик 610 может быть установлен по центру дороги.
[99] Кроме того, если оставшаяся конфигурация совпадает с описанной ранее конфигурацией, ее описание опускается.
[101] В соответствии с еще одним объектом настоящего изобретения, как показано на Фигуре 10, система автоматического управления 100 может быть укомплектована модулем определения состояния дороги 170 для определения состояния поверхности дороги. Данный модуль конфигурируется (используется) для обработки изображений, полученных установленной на автомобиле камерой 400, и проверки наличия выбоин и трещин на поверхности дороги при сравнении с общим состоянием дороги, а также для определения их размеров, с целью изменения режима управления автомобилем, если они имеют значительные размеры.
[102] Если проверенный участок имеет выбоины и трещины значительных размеров, которые определяют изменение режима управления автомобилем, полоса движения изменяется, в противном случае, автомобиль продолжает движение по выбранной ранее полосе движения.
[103] При отсутствии соответствующих чертежей, модуль архивирования (сохранения) данных (не показан на чертежах) может быть установлен в системе автоматического управления 100 для хранения информации о полосе движения, по которой автомобиль двигался ранее, и для управления автомобилем с учетом архивированных данных, если в следующий раз автомобиль будет двигаться к тому же или расположенному рядом месту назначения, что обеспечит более надежное управление автомобилем.
[104] При архивировании данных о движении автомобиля изображения, полученные камерой 400, архивируются вместе с данными о полосе движения. При движении управляемого автомобиля по полосе движения, по которой он двигался ранее, он управляется с учетом ранее архивированных данных о полосе движения, при этом, производится сравнение архивированных изображений с изображениями, полученными при текущем движении, даже при движении автомобиля по узкой дороге.
[105] В это время установленная в верхней части автомобиля камера 400 конфигурируется для получения изображений в процессе движения автомобиля. При архивировании полученных изображений они сравниваются с изображениями, полученными при текущем положении автомобиля на полосе движения.
[106] Кроме того, при движении автомобиля по узкой дороге, в частности, где полосы движения не распознаются по полученным изображениям, обработанным модулем обработки изображения 152, часть маршрута выделяется из полученных изображений, и сохраняются данные об осевой линии (линии разграничения направления движения). При повторном движении автомобиля по этой же дороге автомобиль более эффективно управляется с учетом данных об осевой линии.
[107] Полученные камерой 400 изображения сравниваются с предварительно архивированными изображениями, с учетом определения отдельных объектов или людей, находящихся по направлению движения автомобиля, что позволяет избегать аварийных ситуаций.
[108] Если технология проведения сравнения изображений является известной, ее описание опускается. Если оставшаяся конфигурация совпадает с описанной ранее конфигурацией, ее описание опускается.
[110] В соответствии с Фигурой 11 и дополнительным примером применения настоящего изобретения модуль безопасности движения 140 системы автоматического управления 100 может быть укомплектован беспроводным приемником 144 для получения внешнего беспроводного сигнала. Беспроводной приемник 144 конфигурируется для получения данных о каждом месте стоянки 700 автотранспорта, передаваемых беспроводным приемопередатчиком 710.
[111] Каждое место стоянки 700 автотранспорта имеет специальный идентификационный номер, который содержится в передаваемом беспроводном сигнале. Передаваемая информация о месте стоянки 700 автотранспорта содержит подробные географические данные о каждом месте стоянки 700 автотранспорта и положении припаркованного автомобиля.
[112] Беспроводной приемник 144 получает географические данные и информацию о состоянии места стоянки из места стоянки 700 автотранспорта, данные о размере автомобиля, хранящиеся в модуле управления движением 130, и данные размера колес и угла поворота колес при управлении системой рулевого управления 134. Описанный в настоящем изобретении модуль маршрутизации 110 конфигурируется для выбора положения парковки автомобиля и формирования специальной полосы движения для движения автомобиля к месту парковки, куда автомобиль двигается для парковки под управлением модуля 130.
[113] В определенном месте каждого места стоянки 700 автотранспорта установлен третий приемопередатчик 620, который позволяет точно определять положение автомобиля на месте стоянки 700 автотранспорта при помощи первого приемопередатчика 165, установленного на автомобиле, что обеспечивает точность управления автомобилем.
[114] Третий приемопередатчик 620 должен быть установлен на краю или на углу места стоянки 700 автотранспорта, что позволит точно определять положение автомобиля на месте стоянки 700 автотранспорта.
[116] В соответствии с дополнительным примером применения настоящего изобретения камера 400, установленная на автомобиле, получает изображения перед автомобилем по ходу его движения. При движении автомобиля рядом с перекрестком модуль обработки изображения 152 может анализировать изображение светофора 300, находящегося по ходу движения, сравнивая с изображениями, полученными камерой 400, определяя, таким образом, текущий сигнал светофора.
[117] Модуль управления движением 130 может хранить данные различных образцов светофоров и их сигналов. Текущий сигнал светофора определяется путем сравнения образцов с изображением светофора, полученного модулем обработки изображения 152.
[119] В соответствии с дополнительным примером применения настоящего изобретения беспроводной приемник 144 модуля безопасности движения 140 может получать данные из общей коммуникационной сети. Если водитель, находящийся на значительном расстоянии, передает данные о месте назначения на коммуникационный терминал, в частности, на сетевой терминал (не показан на чертежах) или смартфон, беспроводной приемник 144 получает данные о месте назначения, а модуль управления движением 130 определяет это место и управляет движением автомобиля к месту назначения в автоматическом режиме.
[120] С этой целью, даже если водитель находится на расстоянии от автомобиля, то при необходимости, он задает данные о месте назначения на смартфоне или компьютере, затем автомобиль получает данные о месте назначения и может управляться и двигаться к месту назначения без водителя, после чего водитель может использовать его стандартным способом.
[121] В соответствии с дополнительным примером применения настоящего изобретения детекторный модуль (не показан на чертежах) может быть отдельно установлен внутри автомобиля. Таким образом, автомобиль сможет распознавать ключ или карточку RFID (Radio Frequency IDentification - радиочастотная идентификация) водителя. Если детекторный модуль автомобиля определяет соответствие данных заданным параметрам, автомобиль может издать определенный звуковой сигнал клаксона или через динамики музыкальной системы, а также осуществить мигание аварийных лампочек, что позволит водителю определить местоположение автомобиля и беспрепятственно его обнаружить.
[122] Если у водителя не ключа или карты RFID, камера 400 может получить его изображение, а модуль обработки изображения 152 - определить соответствие изображения данным зарегистрированного лица. При обнаружении соответствия водитель может пользоваться функционалом автомобиля, не имея ключа или карточки RFID.
[123] В соответствии с дополнительным примером применения настоящего изобретения модуль безопасности движения 140 может обеспечить комплектацию автомобиля отдельным беспроводным приемопередатчиком (не показан на чертежах), способным передавать данные о текущем местоположении автомобиля на находящийся рядом автомобиль при помощи беспроводного приемопередатчика (не показан на чертежах), а находящийся рядом автомобиль будет получать эти данные при помощи беспроводного приемника 144, установленного в модуле безопасности движения 140, с целью получения в режиме реального времени информации о находящихся рядом автомобилях.
[124] Можно получать информацию в режиме реального времени о том, полностью ли закрыты все двери автомобиля. Тогда при прохождении рядом с автомобилем с неплотно закрытой дверью человек сможет проявить максимальную осторожность во избежание возникновения аварийных ситуаций, связанных с непредвиденным открытием двери автомобиля.
[126] Так как настоящее изобретение может быть применено в различных формах, не влияя на основной смысл и характеристики изобретения, следует понимать, что вышеприведенные примеры не ограничиваются какими-либо деталями описания, если иное не указано, но соответствуют смыслу и целям изобретения, изложенным ниже в формуле изобретения, следовательно, все изменения и модификации, относящиеся к признакам, изложенным в формуле изобретения, либо эквивалентным признакам, находятся в рамках приведенной формулы изобретения.
Промышленное применение
[128] Настоящее изобретение описывает систему автоматического управления транспортным средством, в частности, автоматического управления автомобилем, когда водитель задает место назначения в навигационной системе, а автомобиль переходит в режим автоматического управления собственным движением до заданного места назначения с учетом сигналов светофоров, а также находящихся рядом автомобилей и объектов.
Изобретение относится к системам управления транспортным средством. Система автоматического управления транспортным средством содержит устройство навигации и устройство автоматического управления. Устройство автоматического управления имеет модуль маршрутизации, подключенный к устройству навигации, модуль контроля полосы движения и модуль коррекции ошибок, связанные с модулем управления движения и с модулем безопасности движения. Модуль безопасности движения состоит из датчиков определения расстояния относительно соседних движущихся объектов и беспроводного приемника информации со стационарного беспроводного передатчика данных от светофоров. Модуль контроля полосы движения включает модуль определения полосы движения, связанный с модулем управления движением. Модуль управления движением соединен с двигателем и с тормозной системой, а также с системой рулевого управления транспортного средства при помощи электронного блока управления (ECU), установленного на транспортном средстве, выполненном с датчиками угла поворота каждого колеса, подключенными к модулю управления движением. Модуль выполнен с возможностью сохранения информации о транспортном средстве, угловом положении и диаметре каждого колеса. Достигается повышение безопасности управления транспортным средством. 19 з.п. ф-лы, 11 ил.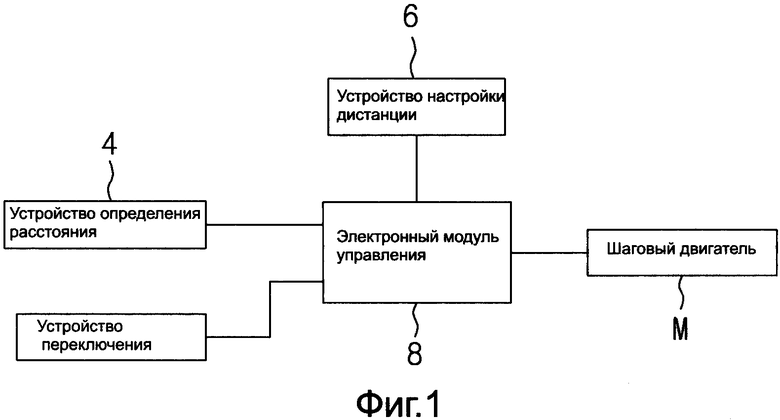
1. Система автоматического управления транспортным средством, содержащая устройство навигации и устройство автоматического управления, имеющее модуль маршрутизации, подключенный к устройству навигации, и модуль коррекции ошибок, связанные с модулем управления движения по полосе движения, заданной модулем маршрутизации, и с модулем безопасности движения, состоящим из датчиков определения расстояния относительно соседних движущихся объектов и беспроводного приемника информации со стационарного беспроводного передатчика светофора, а также модуль контроля полосы движения, включающий модуль определения текущей полосы движения, связанный с модулем управления движением, и модуль обработки изображения, подключенный к камере, установленной на транспортном средстве, причем модуль маршрутизации выполнен с возможностью определения и выбора основной и дополнительной полос дороги на маршруте, проложенном к месту назначения, а также с возможностью архивирования информации о дороге, модуль коррекции ошибок выполнен с возможностью коррекции полосы движения путем взаимодействия с устройством навигации и с модулем управления движением, который соединен с возможностью управления с двигателем, с акселератором и с тормозной системой, а также с системой рулевого управления транспортного средства при помощи электронного блока управления (ECU), установленного на транспортном средстве, выполненном с датчиками угла поворота каждого колеса, подключенными к модулю управления движением, выполненному с возможностью сохранения информации о транспортном средстве, угловом положении и диаметре каждого колеса, и осуществления управления движением с учетом архивированной и сохраненной информации.
2. Система по п. 1, отличающаяся тем, что устройство автоматического управления снабжено подключенным к модулю управления движением модулем определения положения.
3. Система по п. 2, отличающаяся тем, что модуль определения положения снабжен первым приемопередатчиком для взаимодействия со стационарно установленным на обочине дороги вторым приемопередатчиком, выполненным с возможностью получения и передачи обратно сигнала от первого приемопередатчика.
4. Система по п. 2, отличающаяся тем, что модуль определения положения снабжен первым приемопередатчиком для взаимодействия со стационарно установленным на стоянке третьим приемопередатчиком, выполненным с возможностью получения и передачи обратно сигнала от первого приемопередатчика.
5. Система по п. 1, отличающаяся тем, что устройство автоматического управления снабжено подключенным к модулю управления движением модулем определения состояния дороги.
6. Система по любому из пп. 1-5, отличающаяся тем, что модуль управления движением выполнен с возможностью определения значения скорости транспортного средства путем умножения значения диаметра окружности колеса на значение числа оборотов колеса в единицу времени, а также осуществления управления движением и перехода с одной полосы на другую полосу и обратно с учетом реализации соответствия угла поворота передних колес радиусу поворота полосы движения.
7. Система по любому из пп. 1-5, отличающаяся тем, что модуль управления движением выполнен с возможностью управления двигателем, тормозной системой и системой рулевого управления на основе данных о транспортном средстве для движения по полосе движения при помощи установленного на транспортного средстве электронного блока управления (ECU).
8. Система по любому из пп. 1-5, отличающаяся тем, что модуль коррекции ошибок выполнен с возможностью корректировки полосы движения в режиме реального времени с учетом текущего положения транспортного средства, данные о котором получены от устройства навигации, путем сравнения этих данных с данными положения полосы движения.
9. Система по любому из пп. 1-5, отличающаяся тем, что модуль безопасности движения выполнен с возможностью предотвращения аварийных ситуаций путем определения других транспортных средств или объектов, находящихся рядом с транспортным средством, на основании сигналов датчиков определения расстояния, устанавливаемых спереди, сзади и по бокам или по диагоналям транспортного средства.
10. Система по п. 9, отличающаяся тем, что модуль безопасности движения содержит беспроводной приемник, выполненный с возможностью получать сигналы светофоров от беспроводных передатчиков, установленных на каждом из светофоров, находящихся на перекрестках и пешеходных переходах.
11. Система по любому из пп. 1-5, 10, отличающаяся тем, что модуль маршрутизации выполнен с возможностью определения полосы движения с использованием данных о перекрестках, пешеходных переходах, туннелях, светофорах, ограничениях скорости на дороге и о специальной частоте передачи данных с каждого светофора.
12. Система по любому из пп. 1-5, 10, отличающаяся тем, что модуль маршрутизации выполнен с возможностью архивирования данных о ширине и количестве полос движения на каждой проезжей части, по которой двигалось транспортное средство, и формирования полосы для движения транспортного средства на полосе движения и дополнительной полосы движения, позволяющей транспортному средству перемещаться на другие полосы движения проезжей части.
13. Система по любому из пп. 1-5, 10, отличающаяся тем, что модуль обработки изображения выполнен с возможностью обработки изображений, передаваемых камерой, установленной спереди транспортного средства; а модуль определения полосы движения выполнен с возможностью определения полосы движения путем анализа результатов обработки изображений модулем обработки изображения.
14. Система по п. 13, отличающаяся тем, что модуль определения положения выполнен с возможностью определения положения транспортного средства и определения полосы движения, на которой находится транспортное средство, двигающийся по дороге, с использованием данных о полосе движения, определенных модулем обработки изображения и модулем определения полосы движения.
15. Система по п. 3, отличающаяся тем, что модуль определения положения выполнен с возможностью определения полосы движения, на которой находится транспортное средство, с использованием данных о расстоянии между обеими сторонами дороги и ширине полосы движения, которые определяются при помощи сигналов, передаваемых первым и вторым приемопередатчиками, а также добавления разделительной линии к краям дороги с обеих сторон на полученных изображениях и архивирование этих данных.
16. Система по п. 5, отличающаяся тем, что модуль определения состояния дороги выполнен с возможностью определения наличия любых трещин и выбоин путем анализа изображений, полученных с камеры, установленной на транспортном средстве, а также определения наличия или отсутствия любого препятствия на дороге путем сравнения полученного с камеры изображения при движении транспортного средства и предыдущего изображения.
17. Система по любому из пп. 1-5, 10, 14, 15, отличающаяся тем, что она снабжена средствами архивирования данных об управлении транспортным средством, которые включают в себя данные о полосе движения, по которой транспортное средство двигалось раньше, и изображения, полученные установленной на транспортном средстве камерой и используемые для сравнения с данными о положении транспортного средства на полосе движения, осуществляемого путем сравнения архивированных изображений и изображений, полученных камерой.
18. Система по п. 4, отличающаяся тем, что она выполнена с возможностью получения беспроводным приемником от третьего приемопередатчика, установленного на месте стоянки автотранспорта, географических данных о месте предусмотренной стоянки автотранспорта и о месте парковки транспортного средства, а также формирования модулем маршрутизации специальной полосы движения для управления движением транспортного средства от места текущего положения транспортного средства до места его парковки, обеспечивая, таким образом, его парковку.
19. Система по п. 18, отличающаяся тем, что модуль определения положения транспортного средства выполнен с возможностью передачи и получения высокочастотного сигнала между первым приемопередатчиком и третьим приемопередатчиком, устанавливаемым на краю места стоянки автотранспорта для получения сигнала первого приемопередатчика и его передачи обратно для определения положения транспортного средства с учетом данных о крайнем секторе и географических данных места стоянки автотранспорта при помощи сигналов, передаваемых первым и третьим приемопередатчиками.
20. Система по любому из пп. 1-5, 10, 14, 15, 18, 19, отличающаяся тем, что предусматривает выявление изображения светофора из полученного установленной на транспортном средстве камерой изображения и его сравнение с образцами изображений светофоров, хранящихся в модуле управления движением, для определения текущего сигнала светофора.
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| KR 20120026690 A, 20.03.2012 | |||
| KR 100946525 B1, 11.03.2011 | |||
| US 5910782 A, 08.06.1999 | |||
| СИСТЕМА И ПРОГРАММА ПРОВОДКИ ПО МАРШРУТУ | 2007 |
|
RU2400710C1 |

