Изобретение относится к управлению, а именно к системам автоматического управления движением транспортных средств и может быть использовано для создания безлюдных транспортных автомагистралей.
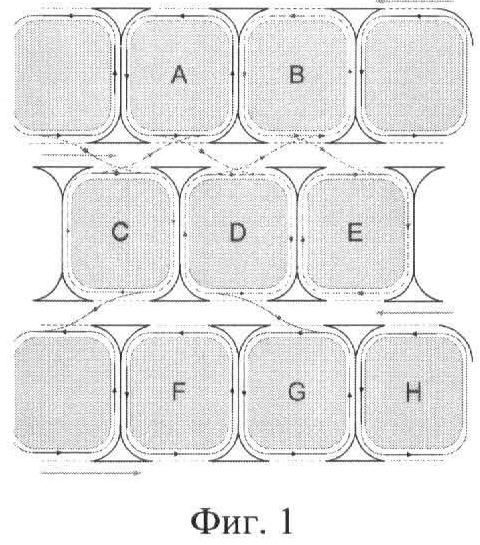
Известен способ, описанный в [1], относящийся к системам управления движением автомобилей. Способ бессветофорного движения - концепция организации дорожного движения, основанная на том, что на некоторых видах перекрестков для безопасного разъезда автомобилей не требуется светофор, при этом траектории транспортных средств пересекаются исключительно во время перестроения (фиг.1). Способ управления основан на системе заранее принятых правил движения, а также определенной геометрии перекрестков.
Устройства перекрестков, на которых реализуется описанный способ управления движением:
Т-образный перекресток с односторонней главной дорогой и двусторонней второстепенной;
Y-образный с круговым движением.
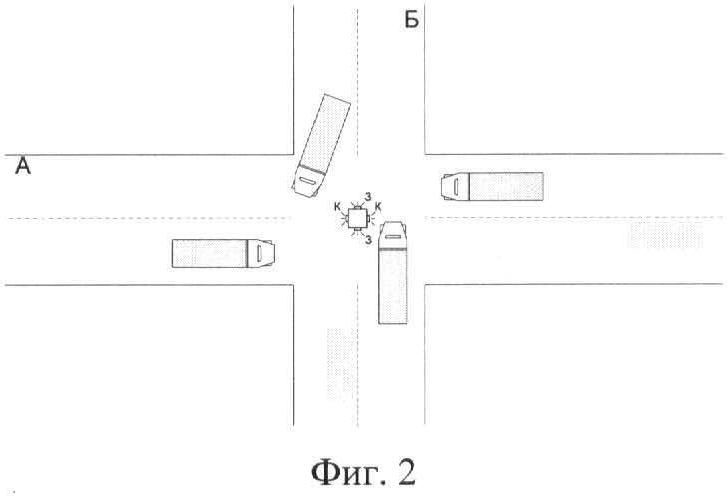
Известен наиболее близкий по технической сущности к изобретению способ управления движением автомобилей на перекрестке [1], основанный на использовании светофоров - устройств, обеспечивающих взаимную синхронизацию фаз движения и ожидания пересекающихся потоков транспортных средств (фиг.2), путем подачи водителям цветных световых сигналов (зеленый - движение, красный - ожидание).
Устройство перекрестка, на котором реализуется описанный способ включает две автодороги с двусторонним движением, на пересечении которых установлен светофор, представляющий собой светосигнальное устройство с несколькими цветными источниками света на каждое направление движения транспорта.
Недостатком описанных аналога и прототипа является низкая пропускная способность перекрестков, что обусловлено необходимостью снижения скорости или остановки, а затем ее увеличения, а также повышенная опасность столкновений из-за пересечения движущихся потоков транспортных средств.
Технической задачей изобретения является достижение высокой точности определения местоположения транспортных средств в потоке и динамическое разведение пересекающихся транспортных потоков на перекрестке в автоматическом режиме управления. Технический результат изобретения заключается в обеспечении синхронизации движения всех транспортных потоков и противофазного преодоления точек пересечения этими потоками, при этом для синхронизации используется последовательность синхроимпульсов единая для всех транспортных средств участвующих в движении по перекрестку.
Единый технический результат изобретения достигается тем, что в способе автоматического управления движением транспортных средств на перекрестке, включающем пересечение двухсторонних дорог или полос движения на одном уровне, заключающемся в определении приоритета движения транспортных средств по цветовым сигналам светофоров, автоматическое управление движением транспортных средств в окрестности перекрестка осуществляется посредством сигналов наземного радиопередатчика синхроимпульсов и цифровой фотокамеры, системы автоматического управления, которая обеспечивает управление движением каждого транспортного средства в боковом канале, стабилизируя его поперечное положение относительно навигационной пунктирной линии, а в продольном канале - управление движением с постоянной скоростью и с фиксированным продольным положением относительно других транспортных средств в своей полосе, а пересечение однорядных двусторонних дорог дополнительно содержит четыре круговых ответвления в виде астроиды, по которым выполняются правые и левые повороты, при въезде каждого транспортного средства на перекресток по сигналу наземного радиопередатчика синхроимпульсов определяют номер перекрестка и по маршруту движения транспортного средства, записанному в модуле памяти цифрового вычислителя, выбирают направление его движения по перекрестку, посредством цифровой фотокамеры получают изображения автодороги с нанесенными линиями дорожной разметки, содержащими навигационные пунктирные линии и метки синхронизации, а с помощью модуля обработки изображений цифрового вычислителя осуществляют обработку изображений и определяют координаты (Yij,Zij) м, двух одноименных вершин навигационной пунктирной линии каждого из трех направлений движения на фоточувствительной матрице цифровой фотокамеры, где i=1,2 номер вершины, j=1,2,3 номер направления движения j=1 - налево, j=2 - прямо, j=3 - направо, в модуле вычислений цифрового вычислителя вычисляют расстояние от выбранной линии дорожной разметки до транспортного средства,

где (Yi,Zi)=(Yij,Zij) - координаты двух одноименных вершин навигационной пунктирной линии выбранного j-го направления, F - фокусное расстояние фотообъектива, h - высота расположения цифровой фотокамеры от дорожного полотна, α - угол наклона оптической оси цифровой фотокамеры от продольной оси транспортного средства вокруг его поперечной оси, вычисляют сигнал управления
 ,
,
где kб - коэффициент передачи канала бокового управления, Zзад - величина, определяющая стабилизируемое положение транспортного средства относительно навигационной пунктирной линии, сигнал управления подают на исполнительное устройство канала бокового управления, сигнал которого прикладывают к рулевому колесу управления, чем обеспечивается управление поперечным положением транспортного средства относительно навигационной пунктирной линии, принимают сигнал наземного радиопередатчика синхроимпульсов бортовым приемником синхроимпульсов, определяют время до переднего фронта ближайшего синхроимпульса tc, посредством модуля обработки изображений цифрового вычислителя осуществляют обработку оцифрованного изображения автодороги при этом определяют время обнаружения метки синхронизации tфк и координату метки синхронизации на фоточувствительной матрице цифровой фотокамеры Yс, в модуле вычислений цифрового вычислителя вычисляют временную поправку Δt,

вычисляют управляющее воздействие в канале продольного управления
где kn - коэффициент передачи канала продольного управления, Т - период синхроимпульсов,
сигнал управления подают на исполнительное устройство канала продольного управления, сигнал которого прикладывают к педали газа двигателя, что обеспечивает управление скоростью транспортного средства, синхронное движение потоков транспортных средств в левом и правом ответвлениях и прямом участке обеспечивается нанесением меток синхронизации, удовлетворяющих следующим условиям
D=6L,
где D` - период меток синхронизации в левом ответвлении, D`` - период меток синхронизации в правом ответвлении, D - период меток синхронизации на прямом участке перекрестка, Н - ширина полосы движения дороги, π - число пи, L - длина транспортного средства, R - радиус изгиба ответвления, k - целое число.
Заявляемый способ осуществляется при помощи устройства для автоматического управления движением транспортных средств на перекрестке, включающего светофор для формирования цветовых сигналов служащих для определении приоритета движения транспортных средств, для достижения технического результата светофор выполнен в виде маломощного наземного радиопередатчика синхроимпульсов, а каждое транспортное средство дополнительно содержит систему автоматического управления, включающую бортовой радиоприемник синхроимпульсов, цифровую фотокамеру, цифровой вычислитель, содержащий модули обработки изображений, вычислений и памяти, исполнительные устройства каналов бокового и продольного управления, рулевое колесо управления и педаль газа двигателя, перекресток выполнен в виде пересечения однорядных двусторонних дорог и дополнительно содержит четыре круговых ответвления для левых и правых поворотов в виде астроиды с нанесенными линиями дорожной разметки, содержащими навигационные пунктирные линии и метки синхронизации используемые для определения продольного и бокового положения транспортного средства, при этом бортовой радиоприемник синхроимпульсов, который обеспечивает прием и формирование синхроимпульсов, в пакете которых закодирован номер перекрестка, своим входом связан с выходом наземного радиопередатчика синхроимпульсов, которые обеспечивают синфазное движение транспортных средств во всех потоках, а своим выходом связан с первым входом модуля вычислений цифрового вычислителя, в котором вычисляется сигнал канала продольного управления системы автоматического управления, своим первым выходом модуль вычислений цифрового вычислителя связан с входом исполнительного органа канала продольного управления, который осуществляет управление оборотами двигателя транспортного средства, выход которого связан с педалью газа двигателя, что обеспечивает скоростной режим движения транспортного средства и стабилизацию его положения относительно других транспортных средств в этом потоке, цифровая фотокамера своим входом получает видеоинформацию о дорожной ситуации, которая оцифровывается и преобразуется в необходимый формат записи, своим выходом связана с входом модуля обработки изображений цифрового вычислителя, где определяются координаты изображений двух одноименных точек навигационной пунктирной линии каждого из трех направлений движения, своим выходом связанного с вторым входом модуля вычислений цифрового вычислителя, а своим третьим входом связанного с модулем памяти цифрового вычислителя, где хранится маршрут в виде последовательности и направлений проезда перекрестков, в модуле вычислений цифрового вычислителя осуществляется определение времени обнаружения меток синхронизации и вычисление временной поправки, вычисление бокового отклонения от выбранной по номеру перекрестка навигационной пунктирной линии, а также сигнала управления бокового канала, выбор навигационной пунктирной линии осуществляется в модуле вычислений по маршруту, модуль вычислений цифрового вычислителя своим вторым выходом связан с входом исполнительного устройства канала бокового управления, который обеспечивает управление рулевого колеса, поддерживая при этом поперечное положение транспортного средства относительно навигационной пунктирной линии, выход исполнительного устройства канала бокового управления связан с рулевым колесом управления.
Существенными отличительными признаками от прототипа по способу является следующая совокупность действий:
автоматическое управление боковым движением транспортных средств по навигационным пунктирным линиям;
стабилизация скорости движения и положения транспортных средств в потоке относительно друг друга по меткам синхронизации и синхроимпульсам;
противофазная синхронизация пересекающихся потоков транспортных средств от одного источника синхроимпульсов;
По устройству, наличие следующих элементов:
маломощного наземного радиопередатчика синхроимпульсов;
четырех круговых ответвлений в виде астроиды, представляющих собой четверть окружности каждое;
навигационных пунктирных линий и меток синхронизации на проезжей части перекрестка;
системы автоматического управления каждого транспортного средства, включающей бортовой радиоприемник синхроимпульсов, цифровую фотокамеру, цифровой вычислитель и исполнительные устройства каналов бокового и продольного управления. При этом цифровой вычислитель содержит модули памяти, вычислений и обработки изображений;
рулевого колеса управления и педали газа двигателя.
На фиг.1 приведена схема перекрестка, на котором используется способ бессветофорного управления движением транспортных средств (аналог).
На фиг.2 приведена схема перекрестка, на котором используется способ управления движением транспортных средств посредством светофора (прототип).
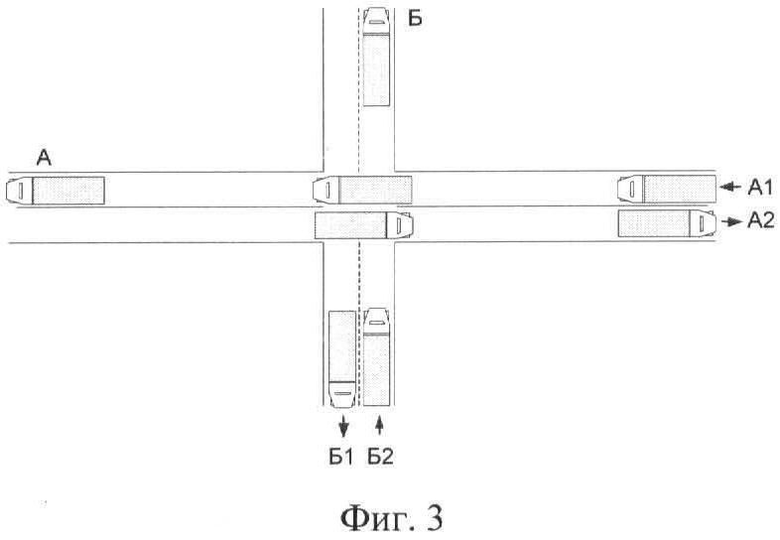
На фиг.3 показана схема проезда перекрестка пересекающимися транспортными потоками.
На фиг.4 показана схема суммирования транспортных потоков.
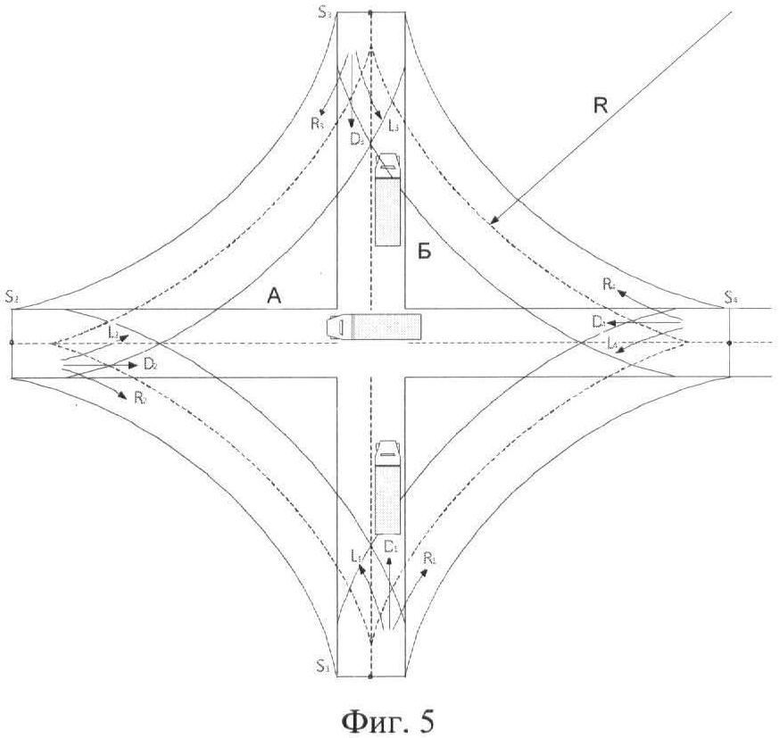
На фиг.5 показано устройство перекрестка.
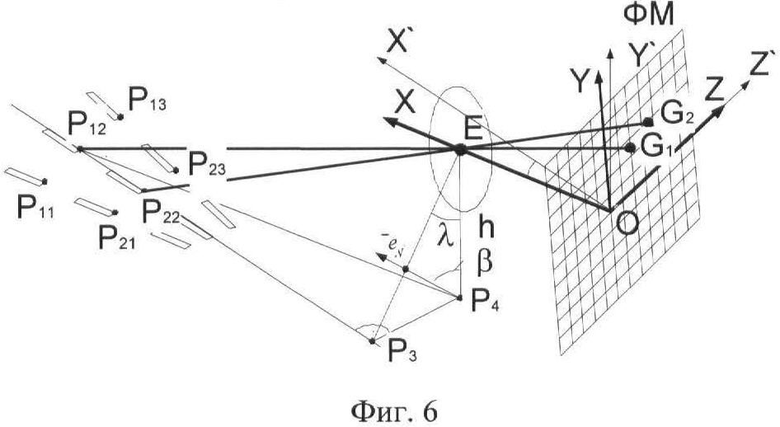
На фиг.6 изображена схема измерения бокового отклонения транспортного средства от навигационной пунктирной линии.
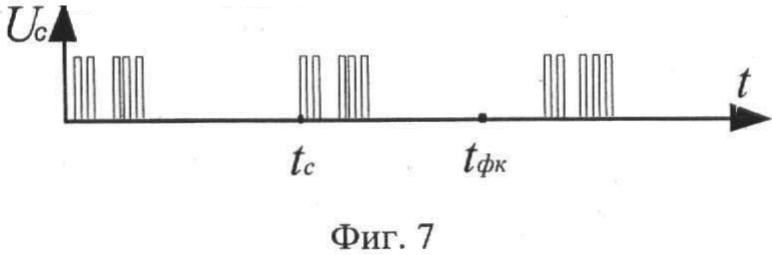
На фиг.7 изображена последовательность синхроимпульсов.
На фиг.8 суммирование трех потоков.
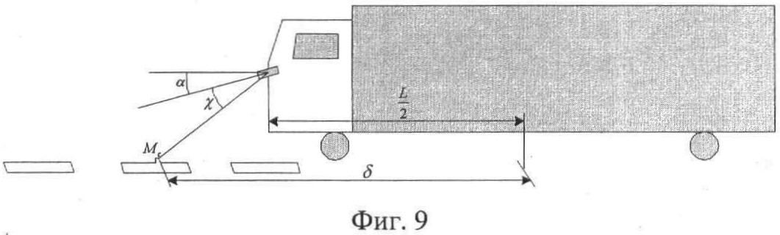
На фиг.9 определение меток синхронизации.
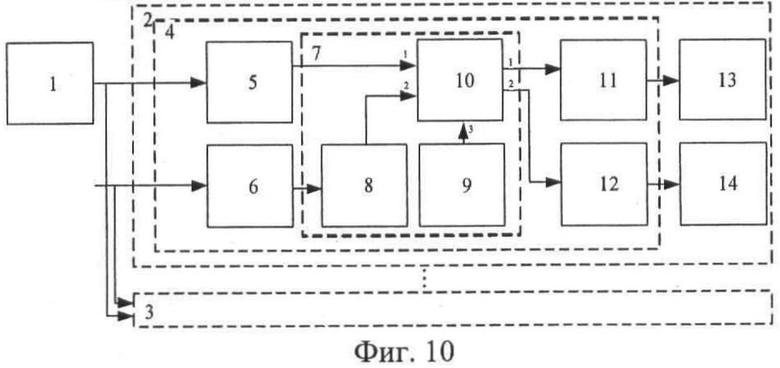
На фиг.10 - система автоматического управления движением.
Описание способа управления движением транспортных средств на перекрестке.
Известно, что образование "автомобильных пробок" в значительной степени обусловлено низкой пропускной способностью автодорог на перекрестках. Вынужденные остановки транспортных средств на перекрестках приводят к серьезным проблемам в организации дорожного движения. Основной проблемой для обычного перекрестка является необходимость остановки для одного транспортного потока, посредством которой обеспечивается проезд другого. Кроме самих остановок некоторое снижение пропускной способности происходит из-за низкой скорости движения транспорта по перекресткам. Поэтому без устранения этих двух причин невозможно увеличение пропускной способности перекрестков. Решение этих проблем возможно только посредством полной автоматизации движения, что позволяет обеспечить высокую скорость автомобилей на перекрестке и исключить ошибки человека-водителя в сложной динамичной обстановке. Организация дорожного движения в окрестности перекрестка основана на динамической синхронизации всех входных и выходных транспортных потоков. Существует достаточно близкий по смыслу аналог - это организация информационных потоков через шину данных в цифровой вычислительной машине. Информационные сигналы поступают на шину поочередно, при этом важно, что все они синхронизируются с одним эталонным генератором, поэтому противофазная очередность прихода всех информационных сигналов обеспечивает их полную сохранность.
Рассмотрим применение этого принципа для пересекающихся транспортных потоков (фиг.3). Для безостановочного движения по перекрестку в направлениях А и Б необходимо чтобы транспортное средство потоков А1 и А2 пересекало перекресток в то время когда транспортные средства потоков Б1 и Б2 находятся вне перекрестка, и наоборот. Чтобы выполнить такое условие необходимо обеспечить:
достаточный период следования транспортных средств в каждом из пересекающихся потоков;
противоположную фазу движения потоков A1, A2 и Б1 и Б2 относительно центра перекрестка.
Для суммирующихся потоков (фиг.4) должно выполняться условие
IА+IБ≤IДОП,
где IА - интенсивность потока А, IБ - интенсивность потока Б, IДОП - предельно-допустимая интенсивность потока.
Невыполнение условия означает перегрузку автодороги, последствием чего может быть "пробка". Дорожная ситуация, представленная на фиг.4, предполагает изменение направления движения транспортного средства на 90°, но выполнить это в пределах перекрестка (по малому радиусу) без снижения скорости невозможно. Поскольку снижение скорости приведет к нарушению синхронизации с потоком А, то необходимо решение, устраняющее это затруднение. Известные конфигурации перекрестков, например, с кольцевым движением, не дают приемлемого решения этой задачи, поскольку на них также возникает проблема изменения направления движения по малому радиусу. Необходимо устройство перекрестка, на котором отсутствуют участки с малым радиусом разворота (фиг.5).
Здесь к конфигурации обычного перекрестка добавлены четыре круговых ответвления, представляющих собой четверть окружности каждый. Ответвления имеют радиус, позволяющий выполнять разворот без уменьшения скорости, а кроме этого разгружают центральную часть перекрестка. Обозначим четыре входящих потока автомобилей с учетом их разделения на левый - L(left), прямой - D(direct), правый - R(right) Lk, Dk, Rk (k=1…4). Обозначим фазы потоков φkj где k=1…4, j=1…3, причем j=1 соответствует левому ответвлению, j=2 - прямому участку, j=3 - правому ответвлению k-го входящего потока, Sk - входные сечения перекрестка. Пересечение перекрестка предполагает выбор одного из трех возможных направлений движения (фиг.5) для каждой из четырех примыкающих автодороги. При приближении к перекрестку бортовой радиоприемник синхроимпульсов каждого транспортного средства принимает радиосигнал наземного радиопередатчика синхроимпульсов, в каждом пакете импульсов которого закодирован номер перекрестка. В цифровом вычислителе этот код декодируется и по номеру перекрестка определяется направление движения по этому перекрестку. Для этого весь маршрут движения транспортного средства программируется в виде таблицы, хранящейся в модуле памяти цифрового вычислителя. В таблице занесены номера перекрестков, по которым в заданной последовательности должно проехать транспортное средство и направления движения по этим перекресткам.
Например:
Таблица читается следующим образом, первый перекресток по маршруту движения транспортного средства №16, на этом перекрестке следует повернуть налево (left). Второй перекресток №22, перекресток пересекать в прямом направлении (direct) и.т.д.
Автоматическое управление боковым движением автомобиля по навигационным пунктирным линиям осуществляется по сигналу бокового отклонения от навигационной пунктирной линии от одной цифровой фотокамеры, которая имеет в своем составе фоточувствительную матрицу, расположенную в фокальной плоскости фотообъектива. Фоточувствительная матрица связана с вычислителем, который по изображениям, поступающим с фоточувствительной матрицы, решает задачу определения поперечной координаты транспортного средства относительно навигационных пунктирных линий разметки [2].
При въезде транспортного средства на перекресток в поле изображения цифровой фотокамеры (фиг.6) попадет сразу три навигационных пунктирных линии, каждая из которых соответствует одному из направлений движения - налево, прямо и направо. Пары идентичных точек на пунктирной линии каждого направления обозначим Р1j, P2j, при этом первый индекс i=1,2 обозначает номер точки, а второй j=1,2,3 - номер направления движения, j=1 - налево, j=2 - прямо, j=3 - направо.
Выбор точек в поле изображения может осуществляться, например, по контурам навигационных пунктирных линий методом оконтуривания [3]. Эти идентичные точки должны быть выбраны в одноименных вершинах навигационных пунктирных линий, ближайших к транспортному средству.
Ось ОХ` совпадает с продольной осью транспортного средства, OZ` - поперечная ось. Оптическая ось цифровой фотокамеры ось ОХ развернута вокруг поперечной оси транспортного, средства на угол α как показано на фиг.6.
Пусть цифровая фотокамера расположена на высоте h=EP4 от дорожного полотна. Принимаем, что вертикальная ось транспортного средства OY` совпадает с перпендикуляром к поверхности автодороги. Известным считаем также фокусное расстояние фотообъектива ОЕ=F.
Изображения точек строим в соответствии с законами геометрической оптики путем пересечения прямых линий P1jG1, P2jG2, проходящих через оптический центр Е фотообъектива, с плоскостью OYZ фоточувствительной матрицы.
Программная обработка оцифрованных изображений поверхности автодороги позволяет определить координаты этих точек на фоточувствительной матрице (Yij,Zij), м. Эти идентичные точки выбирают в одноименных вершинах навигационных пунктирных линий каждого направления, ближайших к транспортному средству. В соответствии с маршрутом движения для этого перекрестка определяют направление движения и по координатам (Yi,Zi)=(Yij,Zij) - двух одноименных вершин навигационной пунктирной линии выбранного j-го направления, вычисляют боковое отклонение транспортного средства от навигационной пунктирной линии.

В качестве источника синхронизирующего сигнала необходимо использовать последовательность импульсов Uс (фиг.7), которая излучается посредством наземного радиопередатчика синхроимпульсов, а затем принимается бортовым приемником синхроимпульсов.
Параметры этих импульсов имеют следующие значения:


где Т - период повторения группы импульсов синхронизации,  - длительность группы импульсов.
- длительность группы импульсов.
Для того, чтобы все транспортные средства, участвующие в движении, не нарушали синхронизма, все отсчеты времени, выполняемые в цифровом вычислителе осуществляются относительно синхроимпульсов, формируемых посредством приема радиосигналов наземного радиопередатчика синхроимпульсов, общего для всех участников движения на перекрестке.
Синхронизация всех потоков
Необходимо решить задачу по определению соотношения фаз всех потоков, которое обеспечивало взаимное проникновение потоков без столкновений. Опишем фазы потоков в зависимости от времени и положения транспортного средства в процессе его движения по тому или иному ответвлению. Для каждого из четырех потоков (i=1…4) начальным моментом времени t=0 будем считать момент прохождения сечений Si, отстоящих от центра перекрестка на расстоянии R.
Тогда для потоков Li, Di, Ri фазы запишутся следующим образом

где xij - расстояние от сечения Si по пути следования j-го потока; t - текущее время;  - период следования транспортных средств; D - дистанция между транспортными средствами в потоке; V - скорость транспортного средства;
- период следования транспортных средств; D - дистанция между транспортными средствами в потоке; V - скорость транспортного средства;  - начальная фаза потока. Примем, что начальная фаза потока
- начальная фаза потока. Примем, что начальная фаза потока  . Тогда из условия одновременного прохождения центра перекрестка начальная фаза встречного потока D3 должна удовлетворять условию
. Тогда из условия одновременного прохождения центра перекрестка начальная фаза встречного потока D3 должна удовлетворять условию  . Для взаимного проникновения взаимно перпендикулярных потоков D1, D3 и D2, D4, необходимо, чтобы эти пары потоков имели сдвиг фаз соответствующий половине периода.
. Для взаимного проникновения взаимно перпендикулярных потоков D1, D3 и D2, D4, необходимо, чтобы эти пары потоков имели сдвиг фаз соответствующий половине периода.

Кроме этого, расстояние от входных сечений до центра перекрестка должно быть кратным величине D, то есть R=nD, где n=1,2,3…. Это условие совместно с условиями (2) и (3) обеспечивает одновременное прохождение транспортных средств встречных потоков через центр перекрестка.
Для определения соотношения фаз потоков во входных сечениях Si применим соотношение (1). В сечении S1 пересекаются потоки D3, L4, R2, поэтому запишем фазы для этих потоков
Прямо 
Налево 
Направо 
где Н - ширина полосы движения дороги.
Для безопасного суммирования трех потоков D3, L4, R2 необходимо чтобы интервал между транспортными средствами в потоках составлял D=6L, как это показано на фиг.8.
Здесь в качестве безопасного расстояния между транспортными средствами в суммарном потоке принята L - длина транспортного средства. Тогда условием безопасного суммирования потоков D3 и L4 будет соотношение

или


Условием безопасного суммирования потоков D3 и R2 будет соотношение

или


где k` и k`` - целые числа.
Поскольку  - число, которое на практике не может принимать ни одно из целых значений
- число, которое на практике не может принимать ни одно из целых значений  , то целесообразно потребовать равенства k`=k``.
, то целесообразно потребовать равенства k`=k``.
При этом следует понимать, что одновременное выполнение условий (7) и (10) в рамках принятых предположений невозможно. Для того, чтобы выполнить суммирование потоков D3, L4, R2, при этом обеспечить необходимый фазовый сдвиг, следует отказаться от гипотезы о постоянстве скорости в пределах перекрестка. Положим, что для потоков транспортных средств, выполняющих повороты, необходимо некоторое изменение скорости на участке разворота. С учетом этого замечания условия синхронизации будут иметь следующий вид:
Левый поворот 
Правый поворот 
где k`=k``=k, V` - скорость в левом повороте, V`` - скорость в правом повороте.
Чтобы выполнить принятое уточнение достаточно положить что D`=6L`, D``=6L`` где L`=L+Δ`, L``=L+Δ``, здесь приращения Δ` и Δ`` обеспечивают изменение скорости автомобиля. Тогда V`T=D`=6(L+Δ`), V``T=D``=6(L+Δ``).
После преобразований условие (13) получит вид


Эти выражения дают возможность нанесения меток синхронизации на пунктирных линиях разметки на круговых ответвлениях перекрестка, обеспечивающих противофазное преодоление точек пересечения транспортными потоками.
Управляющий сигнал, обеспечивающий выдерживание такой скорости, которая позволяет синхронизировать потоки автомобилей, формируется путем сравнения фазы, синхронизирующей последовательности импульсов, и сигнала фотокамеры, считывающей изображения пунктирных линий дорожной разметки. При этом на пунктирных линиях дорожной разметки необходимо нанести метки временной синхронизации Мс с периодом D.
Формирование сигнала фотокамеры φфк осуществляется посредством программной обработки оцифрованных изображений поверхности автодороги. Кроме выбора идентичных точек в вершинах пунктирных линий дорожной разметки программная обработка позволяет также обнаружить на изображении пунктирных линий метки синхронизации, которые могут иметь форму, приведенную на фиг.9. Обнаружение меток синхронизации Мс может осуществляться путем построчного определения ширины линий разметки. При обработке изображения снизу первой строке с увеличенной шириной линии разметки соответствует метка синхронизации, координаты которой на фоточувствительной матрице определяются по правой оконечности строки в пределах пунктирной линии

Выходными сигналами при выполнении этой процедуры являются момент времени tфк обнаружения метки Мс и ее координата  , где χ - угловая координата метки Мс. Поскольку метка смещена относительно центра автомобиля на величину
, где χ - угловая координата метки Мс. Поскольку метка смещена относительно центра автомобиля на величину

вычислим временную поправку на это смещение

Используя величину поправки Δt и программно формируемое время tc до переднего фронта ближайшего синхроимпульса (фиг.6), вычислим фазовый сдвиг, который используется для формирования управляющего воздействия в продольном канале управления, который обеспечивает регулирование оборотов двигателя транспортного средства.
Сигнал управления Δn на изменение оборотов двигателя формируется пропорционально разности фазового сдвига φфк-φс
где Kn - значение передаточного числа регулятора оборотов двигателя.
Сигнал Δn подается на исполнительное устройство продольного канала управления, которое воздействует на педаль газа двигателя, при этом система управления автомобиля работает в режиме стабилизации скорости, значение которой может быть определено

Устройство для автоматического управления движением по перекрестку (фиг.10) содержит маломощный наземный радиопередатчик синхроимпульсов, а каждое транспортное средство содержит систему автоматического управления, включающую бортовой радиоприемник синхроимпульсов, цифровую фотокамеру, цифровой вычислитель, содержащий модули обработки изображений, памяти и вычислений, исполнительные устройства каналов продольного и бокового управления. Кроме этого транспортное средство содержит педаль газа двигателя и рулевое колесо управления. Перекресток выполнен в виде пересечения однорядных двусторонних дорог и дополнительно содержит четыре круговых ответвления для левых и правых поворотов в виде астроиды, проезжая часть перекрестка разделена линиями дорожной разметки, содержащими навигационные пунктирные линии и метки синхронизации.
Устройство работает следующим образом. Видеоинформацию с участка автодороги регистрирует и оцифровывает цифровая фотокамера 6, изображение с цифровой фотокамеры обрабатывается в модуле обработки изображений 8 цифрового вычислителя 7. Сигнал наземного радиопередатчика синхроимпульсов 1 принимается бортовым радиоприемником синхроимпульсов 5 и подается в модуль вычислений 10, где считывается номер перекрестка, который позволяет по маршруту, записанному в модуле памяти 9, определить направление движения по перекрестку. В модуле обработки изображений 8 определяются координаты двух точек навигационной пунктирной линии каждого из трех направлений движения, эти координаты подаются в модуль вычислений 10, где по направлению движения выбирается соответствующая навигационная пунктирная линия, а по координатам двух точек выбранной навигационной пунктирной линии вычисляется боковое отклонение от навигационной пунктирной линии, а также вычисляется боковое отклонение от навигационной пунктирной линии, а также вычисляется сигнал управления бокового канала системы автоматического управления 4 транспортного средства 2(3) и подается на исполнительный орган канала бокового управления 12, который обеспечивает управление рулевого колеса управления 14. Радиосигнал наземного передатчика синхроимпульсов 1 принимается бортовым радиоприемником синхроимпульсов 5 и передается в модуль вычислений 10, где совместно с результатами обработки изображений меток синхронизации в модуле обработки изображений 8 вычисляется сигнал управления продольного канала системы автоматического управления 4 и подается на исполнительный орган канала продольного управления 11, который обеспечивает управление педалью газа двигателя 13 транспортного средства 2(3).
Источники информации:
1. Перекресток [Электронный ресурс]. Режим доступа: // ru.wikipedia.org/wiki/ Перекресток - Загл. с экр. (аналог и прототип).
2. Патент РФ на изобретение №2422772, кл. G01S /16, опубл. 27.06.2011.
3. Техническое зрение роботов. Под общ. ред. Ю.Г.Якушенкова. - М.: Машиностроение, 1990. - с.168-176.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ ПОВЕРХНОСТИ АВТОДОРОГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2402037C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ПУНКТИРНОЙ ЛИНИИ ДОРОЖНОЙ РАЗМЕТКИ | 2013 |
|
RU2530476C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ЛИНИИ ДОРОЖНОЙ РАЗМЕТКИ | 2010 |
|
RU2422772C1 |
| СПОСОБ БЕССПУТНИКОВОЙ НАВИГАЦИИ | 2016 |
|
RU2642507C1 |
| СПОСОБ КОНТРОЛЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА НА ПОВОРОТЕ | 2009 |
|
RU2407032C1 |
| СПОСОБ ЛОКАЛЬНОЙ НАВИГАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2706444C1 |
| Централизованная система фотовидеофиксации правонарушений | 2020 |
|
RU2769030C2 |
| СПОСОБ КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2427924C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ВЫЯВЛЕНИЯ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ ПРИ ПРОЕЗДЕ ПЕРЕКРЕСТКА, ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА ИЛИ ПЕШЕХОДНОГО ПЕРЕХОДА | 2015 |
|
RU2587662C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДОРОЖНОГО ДВИЖЕНИЯ | 2010 |
|
RU2469890C2 |


Группа изобретений относится к области управления движением транспортных средств (ТС) на участках пересечений автодорог на одном уровне и предназначено для использования при создании безлюдных междугородних транспортных автомагистралей. Перекресток представляет собой пересечение однорядных двусторонних дорог и дополнительно содержит четыре ответвления в виде астроиды, представляющих собой четверть окружности каждое. Движение ТС по перекрестку осуществляется с скоростью, близкой к крейсерской, а правые и левые повороты выполняются по ответвлениям. На всех участках дорог перекрестка нанесены навигационные пунктирные линии и метки синхронизации. Для автоматического управления движением используется наземный радиопередатчик синхроимпульсов и система автоматического управления (САУ) каждого ТС, которая имеет цифровую фотокамеру, радиоприемник синхроимпульсов, исполнительные органы бокового и продольного канала САУ, и цифровой вычислитель. Группа изобретений обеспечивает преодоление перекрестка без остановок ТС путем противофазного движения ТС в пересекающихся и суммирующихся потоках по навигационным пунктирным линиям и меткам синхронизации. 2 н.п. ф-лы, 10 ил., 1 табл.
1. Способ автоматического управления движением транспортных средств на перекрестке, включающем пересечение двухсторонних дорог или полос движения на одном уровне, заключающийся в определении приоритета движения транспортных средств по цветовым сигналам светофоров, отличающийся тем, что автоматическое управление движением транспортных средств в окрестности перекрестка осуществляется посредством сигналов наземного радиопередатчика синхроимпульсов, цифровой фотокамеры и системы автоматического управления, которая обеспечивает управление движением каждого транспортного средства в боковом канале, стабилизируя его поперечное положение относительно навигационной пунктирной линии, а в продольном канале - управление движением с постоянной скоростью и с фиксированным продольным положением относительно других транспортных средств в своей полосе, причем пересечение однорядных двусторонних дорог дополнительно содержит четыре круговых ответвления в виде астроиды, по которым выполняются правые и левые повороты, при въезде каждого транспортного средства на перекресток по сигналу наземного радиопередатчика синхроимпульсов определяют номер перекрестка и по маршруту движения транспортного средства, записанному в модуле памяти цифрового вычислителя, выбирают направление его движения по перекрестку, посредством цифровой фотокамеры получают изображения автодороги с нанесенными линиями дорожной разметки, содержащими навигационные пунктирные линии и метки синхронизации, а с помощью модуля обработки изображений цифрового вычислителя осуществляют обработку изображений и определяют координаты (Yij,Zij) м, двух одноименных вершин навигационной пунктирной линии каждого из трех направлений движения на фоточувствительной матрице цифровой фотокамеры, где i=1,2 - номер вершины, j=1,2,3 - номер направления движения j=1 - налево, j=2 - прямо, j=3 - направо, в модуле вычислений цифрового вычислителя вычисляют расстояние от выбранной линии дорожной разметки до транспортного средства,

где (Yi,Zi)=(Yij,Zij) - координаты двух одноименных вершин навигационной пунктирной линии выбранного j-го направления, F - фокусное расстояние фотообъектива, h - высота расположения цифровой фотокамеры от дорожного полотна, α - угол наклона оптической оси цифровой фотокамеры от продольной оси транспортного средства вокруг его поперечной оси, вычисляют сигнал управления
 ,
,
где kб - коэффициент передачи канала бокового управления, Zзад - величина, определяющая стабилизируемое положение транспортного средства относительно навигационной пунктирной линии, сигнал управления подают на исполнительное устройство канала бокового управления, сигнал которого прикладывают к рулевому колесу управления, чем обеспечивается управление поперечным положением транспортного средства относительно навигационной пунктирной линии, принимают сигнал наземного радиопередатчика синхроимпульсов бортовым приемником синхроимпульсов, определяют время до переднего фронта ближайшего синхроимпульса tc, посредством модуля обработки изображений цифрового вычислителя осуществляют обработку оцифрованного изображения автодороги, при этом определяют время обнаружения метки синхронизации tфк и координату метки синхронизации на фоточувствительной матрице цифровой фотокамеры Yc, в модуле вычислений цифрового вычислителя вычисляют временную поправку Δt,

где V и L - соответственно скорость и длина транспортного средства,
вычисляют управляющее воздействие в канале продольного управления
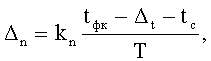
где kn - коэффициент передачи канала продольного управления, Т - период синхроимпульсов,
сигнал управления подают на исполнительное устройство канала продольного управления, сигнал которого прикладывают к педали газа двигателя, что обеспечивает управление скоростью транспортного средства, синхронное движение потоков транспортных средств в левом и правом ответвлениях и прямом участке обеспечивается нанесением меток синхронизации, удовлетворяющих следующим условиям
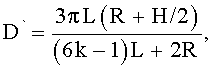
D=6L,
где D` - период меток синхронизации в левом ответвлении, D`` - период меток синхронизации в правом ответвлении, D - период меток синхронизации на прямом участке перекрестка, Н - ширина полосы движения дороги, π - число пи, R - радиус изгиба ответвления, k - целое число.
2. Устройство для автоматического управления движением по перекрестку, включающее светофор для формирования цветовых сигналов, служащих для определении приоритета движения транспортных средств, отличающееся тем, что светофор выполнен в виде маломощного наземного радиопередатчика синхроимпульсов, а каждое транспортное средство дополнительно содержит систему автоматического управления, включающую бортовой радиоприемник синхроимпульсов, цифровую фотокамеру, цифровой вычислитель, содержащий модули обработки изображений, вычислений и памяти, исполнительные устройства каналов бокового и продольного управления, рулевое колесо управления и педаль газа двигателя, перекресток выполнен в виде пересечения однорядных двусторонних дорог и дополнительно содержит четыре круговых ответвления для левых и правых поворотов в виде астроиды с нанесенными линиями дорожной разметки, содержащими навигационные пунктирные линии и метки синхронизации, используемые для определения продольного и бокового положения транспортного средства, при этом бортовой радиоприемник синхроимпульсов, который обеспечивает прием и формирование синхроимпульсов, в пакете которых закодирован номер перекрестка, своим входом связан с выходом наземного радиопередатчика синхроимпульсов, которые обеспечивают синфазное движение транспортных средств во всех потоках, а своим выходом связан с первым входом модуля вычислений цифрового вычислителя, в котором вычисляется сигнал канала продольного управления системы автоматического управления, своим первым выходом модуль вычислений цифрового вычислителя связан с входом исполнительного органа канала продольного управления, который осуществляет управление оборотами двигателя транспортного средства, выход которого связан с педалью газа двигателя, что обеспечивает скоростной режим движения транспортного средства и стабилизацию его положения относительно других транспортных средств в этом потоке, цифровая фотокамера своим входом получает видеоинформацию о дорожной ситуации, которая оцифровывается и преобразуется в необходимый формат записи, своим выходом связана с входом модуля обработки изображений цифрового вычислителя, где определяются координаты изображений двух одноименных точек навигационной пунктирной линии каждого из трех направлений движения, своим выходом связанного с вторым входом модуля вычислений цифрового вычислителя, своим третьим входом связанного с модулем памяти цифрового вычислителя, где хранится маршрут в виде последовательности и направлений проезда перекрестков, в модуле вычислений цифрового вычислителя осуществляется определение времени обнаружения меток синхронизации и вычисление временной поправки, вычисление бокового отклонения от выбранной по номеру перекрестка навигационной пунктирной линии, а также сигнала управления бокового канала, выбор навигационной пунктирной линии осуществляется в модуле вычислений по маршруту, модуль вычислений цифрового вычислителя своим вторым выходом связан с входом исполнительного устройства канала бокового управления, который обеспечивает управление рулевого колеса, поддерживая при этом поперечное положение транспортного средства относительно навигационной пунктирной линии, выход исполнительного устройства канала бокового управления связан с рулевым колесом управления.
| JP 2008168905 А, 24.07.2008 | |||
| DE 19702383 А1, 14.08.1997 | |||
| JP 2010173616 А, 12.08.2010 | |||
| САМОХОДНОЕ БАЗОВОЕ ЗВЕНО АВАРИЙНО-СПАСАТЕЛЬНОГО КОМПЛЕКСА В ГУСЕНИЧНОМ ШАССИ | 1994 |
|
RU2087364C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ЛИНИИ ДОРОЖНОЙ РАЗМЕТКИ | 2010 |
|
RU2422772C1 |

