Предлагаемое изобретение относится к области авиации, в частности к конструкциям летательных аппаратов с машущими крыльями.
Известен орнитоптер, содержащий корпус с шарнирно установленными крыльями, силовую установку, состоящую из энергоблока и привода машущих движений крыла. Последний состоит из жестко прикрепленного к корпусу гидроцилиндра с поршнем и штоком и двух штанг. Одни концы штанг шарнирно соединены со штоком гидроцилиндра, а другие концы шарнирно соединены каждая с основанием соответствующего крыла. RU 2270136, В64С 33/00, 20.02.2006.
Недостатком данного технического решения является отсутствие у орнитоптера машущих крыльев, позволяющих осуществлять вертикальный старт. Возникновение подъемной силы на крыльях орнитоптера возможно только при их обдуве встречным потоком воздуха. Для создания необходимой для взлета подъемной силы орнитоптеру требуется для разгона относительно протяженная взлетная полоса. Взлет орнитоптера с ограниченной по размерам площадки невозможен.
Известны мускулолеты, использующие принцип действия приспособления для испытания машущих крылышек, предложенный П.Ф. Шалимовым. Приспособление содержит вертикальную ось, с шарнирно укрепленными на ней двумя крылышками, плоскости которых расположены противоположно относительно друг друга, и подвижно установленную на вертикальной оси муфточку, шарнирно связанную с крылышками подкосами. Крылышки установлены на оси с возможностью вращения вокруг нее и колебания в вертикальной плоскости. При вертикально-возвратном движении муфточки вдоль вертикальной оси она воздействует через подкосы на крылышки и крылышки машут. На них возникают силы тяги, противоположно направленные, ввиду противоположного направления плоскостей крылышек. Под действием этих сил крылышки, махая, разгоняются по кругу, по скорости вращения крылышек судят о развиваемой ими тяге (Васильев Г.С. Основы полета моделей с машущими крыльями. - М.: Оборонгиз, 1953, с. 104). Но на крылышках возникают и подъемные силы ввиду обтекания их встречным потоком воздуха. Это и было использовано в мускулолетах с вертикальным стартом.
Мускулолеты с вертикальным стартом содержат вертикальную ось, два крыла, установленные на вертикальной оси с возможностью вращения вокруг нее и колебания в вертикальной плоскости, и втулку, подвижно установленную на вертикальной оси и шарнирно связанную подкосами с крыльями. Плоскости крыльев расположены противоположно относительно друг друга. Подъемные силы, возникающие на крыльях, поднимают крылья и вертикальную ось с площадкой для пилота. Пилот двигает руками втулку (Владимир Топоров. Механика живого неба. Махокрылы - ротоптеры -http://vitanar.narod.ru/autors/toropovvlad/toropovvlad.htm).
Недостатком данного технического решения является отсутствие у мускулолета крыльев, создающих горизонтальную тягу. Горизонтальный полет мускулолета невозможен.
Известна конструкция аппарата с машущими крыльями с вертикальным стартом, включающая платформу (корпус), вертикальный вал, установленный в платформе с возможностью вертикально-возвратного движения, два крыла с противоположно направленными несущими плоскостями, жестко установленный на платформе подшипник качения. Крылья установлены на вертикальном валу с возможностью вращения вокруг его оси и колебания в вертикальной плоскости и рычагами (подкосами) шарнирно соединены с наружным кольцом подшипника качения (Щербатых А.Г. Мускулолеты. Челябинск: «Край Ра», 2013, с. 124).
Недостатком данной конструкции является отсутствие у аппарата крыльев, создающих горизонтальную тягу. Горизонтальный полет аппарата невозможен.
Наиболее близким к заявляемому техническому решению (прототипом) является махолет, содержащий корпус с шарнирно установленными крыльями и силовую установку для привода крыльев, включающую жестко прикрепленный к корпусу цилиндр с поршнем и штоком и два подкоса крыльев. Подкосы шарнирно соединены каждые со своим крылом и со штоком цилиндра. В корпусе закреплена с возможностью вращения втулка, внутри которой помещена с зазором, допускающим их относительное скольжение и вращение, вертикальная ось. Ось соосно расположена со штоком, связана с ним и несет два крыла, плоскости которых расположены противоположно относительно друг друга. Два крыла установлены на вертикальной оси с возможностью вращения вокруг нее и колебания в вертикальной плоскости и шарнирно связаны подкосами со втулкой. RU 2578389, В64С 33/02, 27.03. 2016.
Недостатком данного технического решения является наличие неуравновешенных колеблющихся масс - машущих крыльев, а также колебание величин аэродинамических сил - подъемной и тяги. Эти силы образуются на машущем крыле, в основном, за половину периода полного взмаха крыла: на махе крыла вниз (Тихонравов М.К. Полет птиц и машины с машущими крыльями. - 2-е изд., доп. - М.: Оборонгиз, 1949, с. 68). Наличие неуравновешенных масс может вызвать вибрационные явления и появление напряжений, выходящих за пределы допустимых, в звеньях механизма привода, корпуса, шасси и снизить надежность и долговечность махолета. Колебания величин подъемных сил на машущих и одновременно вращающихся (ротирующих) крыльях тоже может вызвать вибрацию, а в полете может привести к вертикальным колебаниям корпуса махолета вместе с кабиной пилота, что ухудшит комфортные условия полета.
Задачей, на которую направлено заявляемое изобретение, является создание махолета, у которого отрицательные влияния неуравновешенных колеблющихся масс и колебания величин аэродинамических сил на ротирующих крыльях значительно снижены.
Данная задача решается за счет того, что в заявляемом махолете-ротокрыле, содержащем корпус с шарнирно установленными крыльями, силовую установку, включающую жестко прикрепленный к корпусу цилиндр с поршнем, шток которого шарнирно соединен подкосами с крыльями, закрепленное на корпусе с возможностью вращения кольцо, вертикальную ось, установленную в корпусе с возможностью вертикально-возвратного движения, соосно расположенную со штоком и связанную с ним и несущую два крыла, несущие поверхности которых расположены противоположно относительно друг друга, установленных на вертикальной оси с возможностью вращения вокруг нее и колебания в вертикальной плоскости и шарнирно связанных подкосами с кольцом, согласно изобретению на кольце могут быть шарнирно установлены два крыла в плоскости, перпендикулярной плоскости установки двух крыльев вертикальной оси, шарнирно связанные тягами с вертикальной осью с возможностью вращения вокруг нее и колебания в вертикальной плоскости, несущие поверхности которых расположены противоположно относительно друг друга и ориентированы аналогично с несущими поверхностями крыльев вертикальной оси.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является возможность уравновешивания колеблющихся масс машущих и одновременно вращающихся (ротирующих) крыльев и снижение амплитуды колебания величин аэродинамических сил на машущих ротирующих крыльях.
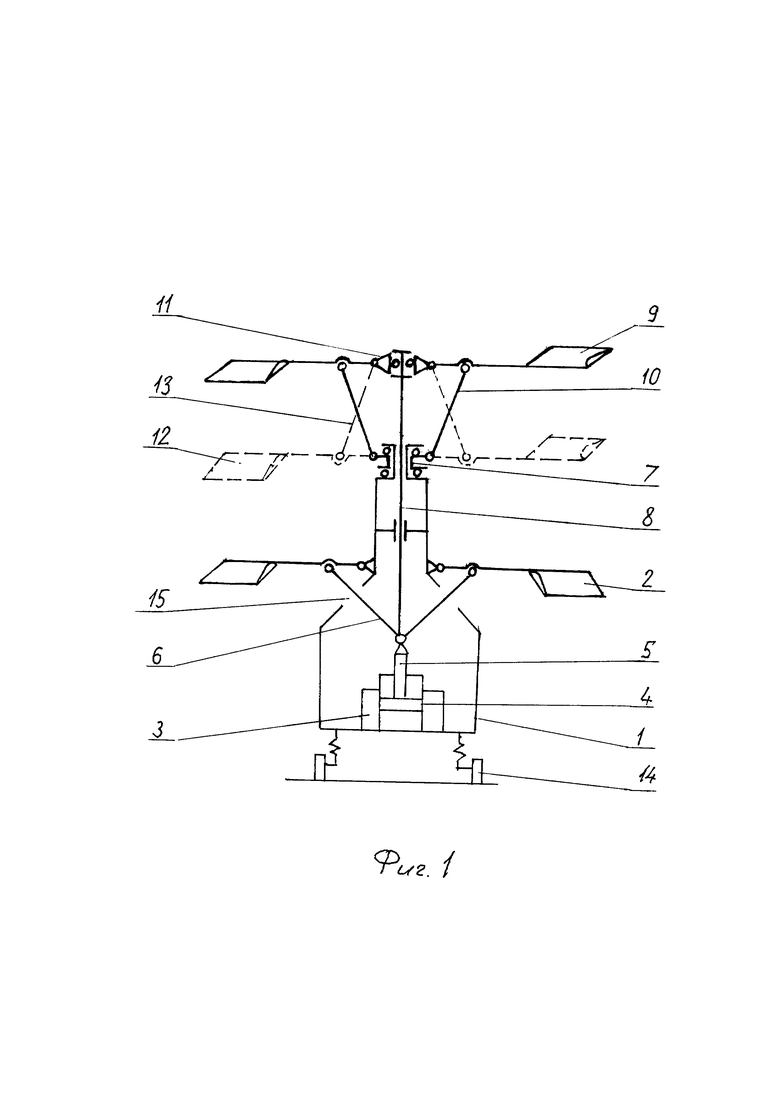
На Фиг. 1 изображена схема махолета-ротокрыла.
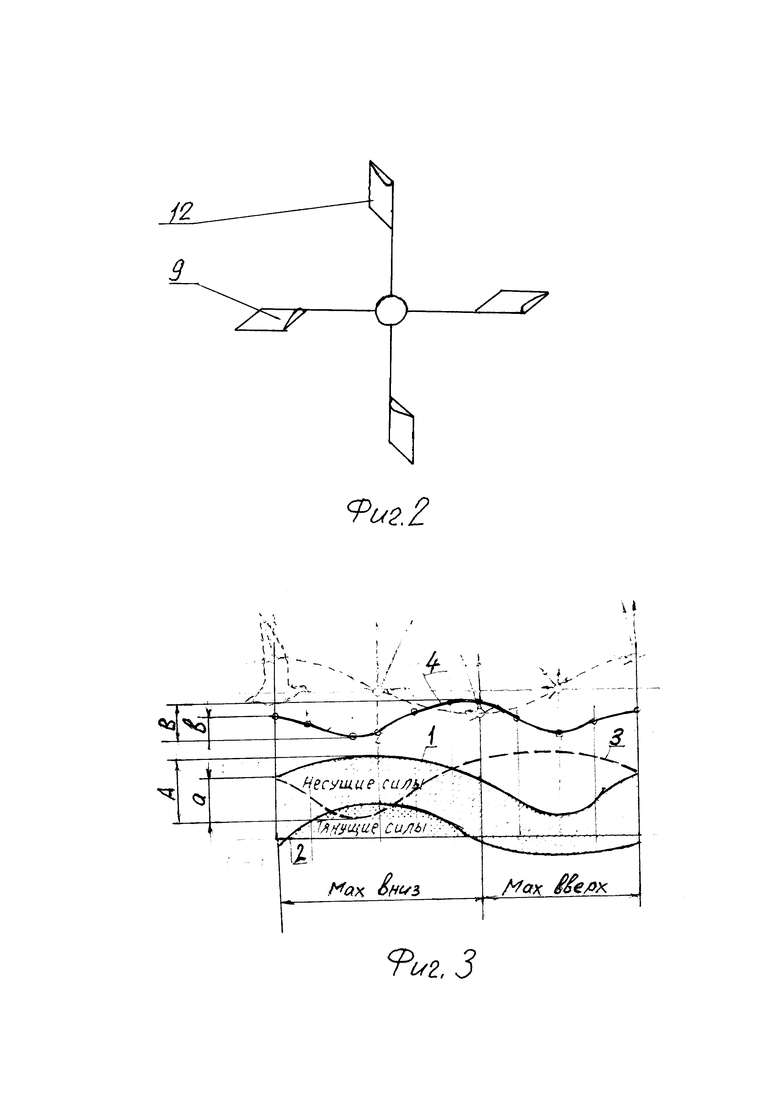
Махолет-ротокрыл содержит корпус 1 с шарнирно установленными крыльями 2, силовую установку 3, цилиндр 4, шток 5 которого шарнирно соединен подкосами 6 с крыльями 2. Цилиндр 4 жестко прикреплен к корпусу 1. На корпусе 1 закреплено с возможностью вращения кольцо 7. Внутри корпуса 1 установлена вертикальная ось 8 с возможностью вертикально-возвратного движения относительно корпуса. Вертикальная ось 8 установлена соосно со штоком 5, с ним связана и несет два крыла 9, несущие поверхности которых расположены противоположно относительно друг друга. Крылья 9 связаны шарнирно подкосами 10 с кольцом 7, а своими основаниями - шарнирно с обоймой 11, которая закреплена на вертикальной оси с возможностью вращения. Таким образом, крылья 9 закреплены на вертикальной оси с возможностью вращения вокруг нее и колебания в вертикальной плоскости. На кольце 7 шарнирно установлены два крыла 12 в плоскости, перпендикулярной плоскости установки двух крыльев 9, то есть в плоскости, перпендикулярной плоскости чертежа. На фиг. 2 изображена схема установки крыльев 12 (для наглядности крылья 12 изображены на схеме фиг. 1 в плоскости чертежа пунктиром). Крылья 12 шарнирно связаны тягами 13 с обоймой 11 вертикальной оси 8 (тяги 13 тоже обозначены пунктиром, так как тоже расположены в плоскости, перпендикулярной плоскости чертежа). Таким образом, крылья 12 установлены с возможностью вращения вокруг вертикальной оси 8 и колебания в вертикальной плоскости. Несущие поверхности крыльев 12 расположены противоположно относительно друг друга и ориентированы аналогично с несущими поверхностями крыльев 9. То есть если совместить плоскости установки крыльев 9 и 12 (как изображено на схеме фиг. 1), то горизонтальные проекции несущих поверхностей последних совпадут. Махолет-ротокрыл имеет шасси 14, которое снабжено амортизаторами для смягчения посадки. В корпусе 1 предусмотрены окна 15 для беспрепятственного движения подкосов 6. Для компенсации возможных перекосов в направляющих корпуса вертикальная ось 8 связана со штоком 5 посредством шарнира. Крылья 2, 9, 12 выполнены с эластичной задней кромкой, что способствует автоматической установке несущих поверхностей крыльев на более оптимальный угол атаки при их машущих движениях (Тихонравов М.К. Полет птиц и машины с машущими крыльями. - 2-е изд., доп. - М.: Оборонгиз, 1949, с. 149).
Махолет-ротокрыл работает следующим образом.
При работающей силовой установке 3 - это может быть двигатель внутреннего сгорания с гидронасосом или компрессором или парогенератор (паровой котел) - рабочее тело (масло, сжатый воздух, пар) поступает в цилиндр 4. Шток 5 приводит в вертикально-возвратное движение вертикальную ось 8, которая через обойму 11 двигает вверх-вниз основания крыльев 9 и тянет-толкает тяги 13 крыльев 12. Крылья 9 и 12 приходят в машущее движение. На машущих крыльях возникают силы тяги. В виду того, что несущие поверхности крыльев 9 и 12 расположены противоположно относительно друг друга, силы тяги на них направлены противоположно и образуют пары сил, под действием которых крылья 9 и 12 с подкосами 10, тягами 13 и кольцом 7 вращаются вокруг вертикальной оси 8. Под действием набегающего потока воздуха на крыльях 9 и 12 возникают подъемные силы, которые через подкосы 10 и кольцо 7 и через тяги 13 и обойму 11 поднимают махолет-ротокрыл. Горизонтальный полет осуществляется за счет тяги крыльев 2, приводимых в машущее движение через подкосы 6 от штока 5. Важно, чтобы несущие поверхности крыльев 12 были ориентированы аналогично с несущими поверхностями крыльев 9, чтобы создавать пару сил того же направления вращения, что и крылья 9. В противном случае при противоположной ориентации несущих поверхностей крыльев 12 и 9 на них будут образовываться пары сил противоположного направления, вращение крыльев застопорится и вертикальный старт махолета-ротокрыла станет невозможен.
Колеблющиеся (машущие) крылья являются источником периодически изменяющихся во времени динамических инерционных сил, воспринимаемых корпусом махолета через кинематические пары (подшипники) и передаваемых на шасси. Динамические давления, передаваемые на корпус и шасси, могут вызвать вибрационные явления в механизмах и деталях махолета. Эти вибрационные явления увеличивают напряжения в материале деталей махолета. Возможна близость к зоне резонанса, что может вызвать появление напряжений, выходящих за пределы допустимых величин. Установлено, что разрушение деталей при переменных напряжениях наступает при значительно меньших их значениях, чем при статическом нагружении. В условиях циклических нагрузок при достаточно большом количестве циклов в металле деталей накапливаются необратимые изменения - усталость, в наиболее напряженном месте детали образуются микроскопические трещины, постепенное развитие которых приводит к разрушению - усталостному разрушению. Поэтому проблема сопротивления усталости является ключевой для повышения надежности машин (Орлов П.И. Основы конструирования. Кн. 1. - Изд. 3-е, испр. - М.: Машиностроение, 1988, с. 194).
Одним из основных способов повышения усталостной прочности деталей является уменьшение динамических нагрузок - для этого проводят балансировку или уравновешивание механизма. Уравновешивание проводят с помощью противовесов (Справочник механика машиностроительного завода. В 2-х томах, Том 1. / Под ред. Р.А. Носкина. - М.: Машиностроение, 1971, с. 27). В заявляемом махолете-ротокрыле противовесом крыльям 9 служат крылья 12. Когда вертикальная ось 8 идет вверх, она заставляет крылья 9 делать мах вниз, а крылья 12 через тяги 13 - мах вверх, и наоборот. То есть ротирующие крылья 9 и 12 попеременно сходятся и расходятся. Также разнонаправлены будут и динамические инерционные силы, возбуждаемые ими. Важно, чтобы при изготовлении ротирующих крыльев 9 и 12 были выдержаны одинаковыми их геометрические размеры и массы, чтобы были одинаковыми подкосы 10 и тяги 13 и чтобы крепления последних к обойме 11 и кольцу 7 были на одинаковых радиусах от вертикальной оси 8, а также на одинаковых радиусах были места крепления подкосов 10 к крыльям 9 и тяг 13 к крыльям 12. Тогда, в идеале, будет полное статическое и динамическое уравновешивание машущих и одновременно вращающихся (ротирующих) крыльев 9 и 12, что значительно снизит динамические инерционные нагрузки на звенья привода крыльев, на корпус и шасси махолета-ротокрыла и, в конечном итоге, повысит его надежность и долговечность. Следует сказать, что речь идет о полном механическом уравновешивании крыльев 9 и 12, полного аэродинамического уравновешивания крыльев 9 и 12 не будет, так как аэродинамические силы на машущем крыле при его махе вверх и вниз в общем-то различны. Поэтому будут присутствовать колебания результирующей аэродинамической силы у махолета-ротокрыла.
Оценим влияние введения пары крыльев 12 на колебание результирующей подъемной силы от ротирующих крыльев махолета-ротокрыла.
На фиг. 3 изображен график несущих (подъемных) и тянущих (тяги) сил для машущего крыла чайки, взятый из выше указанной работы: Тихонравов М.К. «Полет птиц и машины с машущими крыльями. 1949», с. 68. Применим его для нашей оценки, исходя из того, что чайка - природный махолет. На графике фиг. 3 кривые 1 и 2 для подъемной силы и силы тяги соответственно, развиваемые машущим крылом чайки, получены Тихонравовым М.К., равно как и верхняя пунктирная кривая, обозначающая траекторию крыла чайки с силуэтом птицы. Кривые 3 и 4 нанесены нами на этот график и получены из следующих соображений. Будем считать в первом приближении, что кривая 1 качественно показывает изменение подъемной силы на крыльях 9 за полный взмах; так как крылья 12 опережают во взмахе на полпериода крылья 9, то сдвигая кривую 1 на полпериода (часть кривой 1, соответствующую участку «Мах вверх», перенесем на участок «Мах вниз»), получим кривую 3 (пунктиром) - изменение подъемной силы на крыльях 12 за полный взмах. Графическое сложение кривых 1 и 3 дает кривую 4 - изменение результирующей подъемной силы махолета-ротокрыла от суммарного действия крыльев 9 и 12 за их полный взмах.
Мы видим, что кривая 4 для результирующей подъемной силы более сглажена по сравнению с кривыми 1 и 3 для частных подъемных сил крыльев 9 и 12 соответственно: увеличилась частота колебаний на кривой 4 (возросло число полуволн) и уменьшилась их амплитуда по сравнению с кривыми 1 или 3. Сравним эти амплитуды. Для этого поделим отрезки, изображающие их величины на кривых 1 и 4, отрезки измеряем в миллиметрах:
a/b=13/7=1,86,
А/В=19/10,5=1,82,
где a - наибольшая амплитуда колебания подъемной силы на крыльях 9 или 12;
b - наибольшая амплитуда колебания результирующей подъемной силы от суммарного действия крыльев 9 и 12;
А - наибольший диапазан изменения подъемной силы крыльев 9 или 12 за их полный взмах;
В - наибольший диапазон изменения результирующей подъемной силы за полный взмах крыльев 9 и 12.
Таким образом, применение двух пар ротирующих крыльев 9 и 12 приводит к уменьшению амплитуды колебания величины их суммарной подъемной силы не менее чем на 80% по сравнению с величиной подъемной силы одной пары ротирующих крыльев 9. А значит и в горизонтальном полете колебания корпуса махолета-ротокрыла вместе с кабиной пилота будут ощущаться значительно слабее.
То есть задача постройки махолета-ротокрыла с уменьшенными вибрационными явлениями, обусловленными колебаниями движущихся масс крыльев и колебаниями аэродинамических сил на крыльях, решаема.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАХОЛЁТ | 2014 |
|
RU2578389C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| МАХОЛЕТ | 1993 |
|
RU2063367C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| МАХОЛЕТ | 2008 |
|
RU2369526C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| УСТРОЙСТВО МАШУЩИХ КРЫЛЬЕВ С ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2005 |
|
RU2298509C2 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| МАХОЛЕТ | 2002 |
|
RU2266238C2 |
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов с машущими крыльями. Махолет содержит корпус с шарнирно установленными крыльями и силовую установку для привода крыльев, включающую жестко прикрепленный к корпусу цилиндр с поршнем и штоком и два подкоса крыльев. Подкосы шарнирно соединены каждые со своим крылом и со штоком цилиндра. На корпусе махолета закреплено с возможностью вращения кольцо. В корпусе установлена с возможностью вертикально-возвратного движения вертикальная ось, соосно расположенная со штоком, связанная с ним и несущая два крыла. Несущие поверхности крыльев расположены противоположно относительно друг друга. Два крыла установлены на вертикальной оси с возможностью вращения вокруг нее и колебания в вертикальной плоскости и шарнирно связаны подкосами с кольцом. На кольце шарнирно закреплены еще два крыла в плоскости, перпендикулярной плоскости установки двух крыльев вертикальной оси, шарнирно связанные тягами с вертикальной осью с возможностью вращения вокруг нее и колебания в вертикальной плоскости. Обеспечивается уменьшение динамических нагрузок на корпус и шасси, сглаживание колебаний подъемной силы махолета. 3 ил.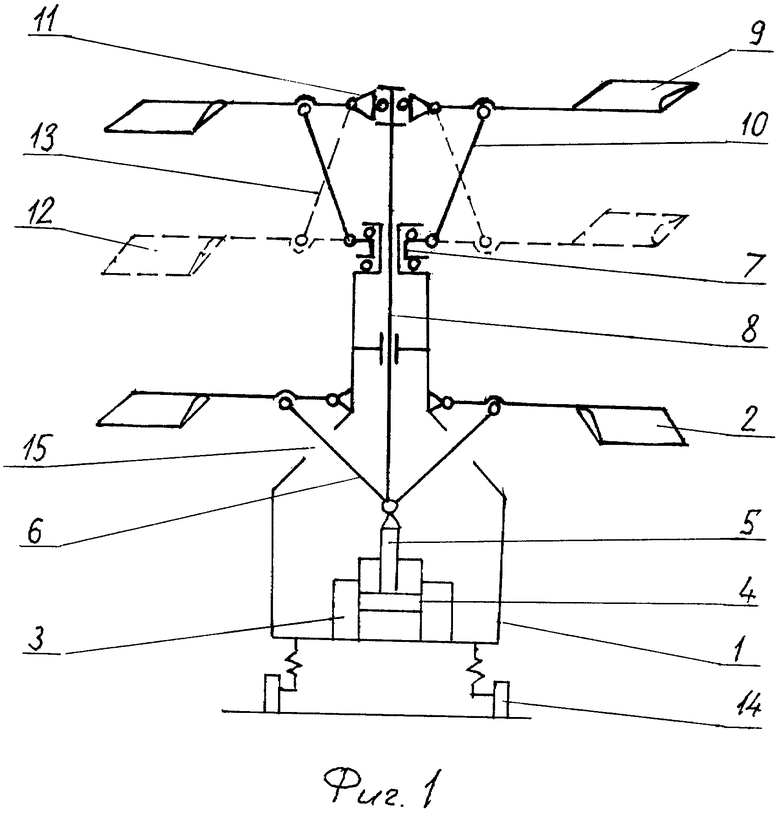
Махолет, содержащий корпус с шарнирно установленными крыльями, силовую установку, включающую жестко прикрепленный к корпусу цилиндр с поршнем, шток которого шарнирно соединен подкосами с крыльями, закрепленное на корпусе с возможностью вращения кольцо, вертикальную ось, установленную в корпусе с возможностью вертикально-возвратного движения соосно со штоком и связанную с ним и несущую два крыла, несущие поверхности которых расположены противоположно относительно друг друга, установленные на вертикальной оси с возможностью вращения вокруг нее и колебания в вертикальной плоскости и шарнирно связанные с кольцом, отличающийся тем, что на кольце шарнирно установлены два крыла в плоскости, перпендикулярной плоскости установки двух крыльев вертикальной оси, шарнирно связанные тягами с вертикальной осью с возможностью вращения вокруг нее и колебания в вертикальной плоскости, несущие поверхности которых расположены противоположно относительно друг друга и ориентированы аналогично с несущими поверхностями крыльев вертикальной оси.
| МЕХАНИЗМ, СОЗДАЮЩИЙ ПОДЪЕМНУЮ СИЛУ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2299156C1 |
| МАХОЛЁТ | 2014 |
|
RU2578389C1 |
| CN 202574618 U, 05.12.2012 | |||
| CN 101492093 A, 29.07.2009. | |||

