Изобретение относится к авиационной технике и технике авиамоделизма и летающих игрушек, конкретно - к машущекрылым летательным аппаратам (МЛА) - махолетам (орнитоптерам, энтомоптерам, анималоптерам и т.п.), использующим в полете машущие крылья для создания подъемной силы и тяги [1].
Может также найти применение при создании крыльчатых движителей в судовой технике, технике судомоделизма и плавающих игрушек.
Известны многочисленные устройства машущих крыльев и приводов МЛА, конечной целью которых является осуществление технического машущего полета. Отражая преимущественно индивидуальные представления и взгляды авторов на физическую природу машущего полета, эти устройства весьма многообразны по принципам действия и конструктивному устройству: от простого махания с параллельными самим себе перемещениями профилей сечений, до сложных - с овало- или восьмеркообразными «гребными» машущими движениями с изменением углов установки ϕ0 всего крыла (угол между центральной хордой крыла и базовой осью Х МЛА) и/или местных углов установки или крутки ϕ(z) крыла (угол между местной хордой и базовой плоскостью крыла) в процессе махания путем самоустановки. Однако несмотря на большое количество попыток практической реализации конечной цели с применением предложенных устройств феномен природного машущего полета не имеет адекватного технического аналога. Вековая мечта многих поколений людей о полете человека, подобном полету мифических Дедала и Икара, остается неисполненной.
Тем не менее, успешные полеты ряда беспилотных МЛА позволяют считать технический машущий полет уже состоявшейся реальностью, а полет человека на машущих крыльях - реальной технической перспективой.
Целью предлагаемого решения является реализация указанной перспективы.
Аналогом с наиболее близким к предлагаемому по технической сущности и достигаемому результату решением является устройство МЛА, реализованное в модели махолета В.А.Киселева [3]. Достоинством устройства является простота и уравновешенность конструкции за счет машущих навстречу друг другу тандемно- расположенных жестких крыльев и двухкоромысловой кинематической схемы их сдвоенного в противофазе привода.
Однако несмотря на положительный эффект, что подтверждается данными [3], характер возвратно-углового собственно махового относительного движения крыльев с различными пропорциональными радиусам махания, амплитудами и скоростями местных сечений по размаху в сочетании с поступательным переносным движением МЛА в полете обусловливает различные по величине и направлению абсолютные скорости сечений при их волнообразном движении в потоке, а следовательно, различные местные углы атаки αi(z) профилей (угол между проекцией местной мгновенной скорости потока на вертикальную плоскость симметрии МЛА и местной хордой крыла), что влечет за собой неодинаковое обтекание различных участков крыла с неизбежным уменьшением аэродинамического качества МЛА в целом и одновременным увеличением потребляемой мощности. Кроме того, увеличение вероятности срыва потока при таком обтекании, особенно при движении вверх, с возможными отрицательными углами атаки [4], - а также отсутствие поперечного управления, допустимое для беспилотных МЛА, в условиях пилотируемого полета небезопасно.
Для устранения указанных недостатков и тем самым создания условий для машущего полета необходимо, чтобы устройство привода и машущих крыльев отвечало минимум двум условиям:
1. обеспечение, как и при обычном полете, оптимальных, удовлетворяющих условиям машущего полета углов атаки профилей крыла в любых точках их траекторий движения в потоке;
2. наличие поперечного управления крылом по крену.
В качестве решения поставленной задачи предлагается устройство, кинематическая схема которого показана на чертеже. Устройство представляет собой кинематически соединенные, например, цепной передачей 1, сдвоенные в противофазе кривошипно-шатунно-коромысловые механизмы привода тандемных машущих крыльев, кривошипы которых посредством трехшарнирных шатунов связаны с парами коромысел-лонжеронов или силовых кромок и податливых на кручение крыльев.
Устройство работает следующим образом.
При вращении по часовой стрелке кривошипы 2 посредством шатунов 3 сообщают связанным с ними коромыслам-лонжеронам 4 и 5 крыльев как основное, собственно маховое движение, так и дополнительное закономерное движение крутки. При работе от одного шатуна коромысла-лонжероны отстают друг от друга, создавая перекос между собой, что и обеспечивает синхронную знакопеременную циклическую крутку крыла в процессе махания с необходимым (по [4]) сдвигом по фазе π/2, то есть осуществляют двойное («бинарное») махание, без которого машущий полет неосуществим [2].
В обращенном движении это равносильно обтеканию остановленного профиля нестационарным волнообразным потоком с некоторой длиной волны и амплитудой. Для осуществления квазиустановившегося полета в таком криволинейном потоке необходимо, как и при обычном полете, чтобы суммарный вектор веса  и сопротивления
и сопротивления  МЛА за цикл взмаха вверх-вниз уравновешивался вектором усредненной результирующей аэродинамической силы
МЛА за цикл взмаха вверх-вниз уравновешивался вектором усредненной результирующей аэродинамической силы  (главный вектор системы сил, действующих на МЛА со стороны окружающей среды при его движении) как суммы векторов средних значений подъемной силы
(главный вектор системы сил, действующих на МЛА со стороны окружающей среды при его движении) как суммы векторов средних значений подъемной силы  и тяги
и тяги  за то же время.
за то же время.
Другими словами, интеграл вектора импульса переменной по времени, величине и направлению силы  за цикл t должен быть равен и противоположен импульсам векторных сумм средних значений подъемной силы и тяги, или веса и сопротивления за то же время:
за цикл t должен быть равен и противоположен импульсам векторных сумм средних значений подъемной силы и тяги, или веса и сопротивления за то же время:

Меняя частоту махания, то есть мощность привода, возможно осуществление различных режимов полета: подъем, горизонтальный полет, снижение.
В свою очередь, изменяемый угол установки ϕ0 оси 6 крыла позволяет независимый от махания дополнительный перекос коромысел-лонжеронов крыла вокруг оси верхних шарниров шатуна, обеспечивая управление по крену.
Таким образом, предлагаемое устройство позволяет решение обоих условий поставленной задачи.
Дополнительные эффекты:
а) крылья, заторможенные в крайних мертвых положениях, с точки зрения несущей способности и управляемости образуют X-образную бипланную коробку, обладающую определенными достоинствами в части уменьшения габаритов и веса крыла при удовлетворительных аэродинамических характеристиках, что может быть использовано на режимах планирования и парения;
б) изменение направления вращения кривошипов на противоположное приводит к недостижимому для самоустанавливающегося крыла режиму реверса тяги, что может быть использовано для торможения при пробеге после посадки и маневрировании задним ходом на земле;
в) будучи расторможенным в отсутствие крутящего момента двигателя устройство при полете имеет тенденцию к аэродинамическому уравновешиванию в мертвых положениях, но, перейдя их за счет инерции вращения механизма, меняет знаки местных углов установки и соотношение подъемных сил крыльев на обратные, что вызывает продолжение вращения устройства, то есть переходит на недостижимый для самоустанавливающихся крыльев режим самомахания, аналогичный самовращению воздушных винтов. Приведенные эффекты указаны впервые.
Литература
1. АВИАЦИЯ. Энциклопедия. - Гл. ред. Г.П.Свищев. Ред.кол.: А.Ф.Белов, Р.А.Беляков, П.Н.Белянин, А.Г.Братухин, Г.С.Бюшгенс и др. (24 чел.). - Науч. изд-во "Большая российская энциклопедия", ЦАГИ им. проф. Н.Е.Жуковского, М.: 1994. Статьи "Махолет - с.330-331; "Орнитоптер" - с.394; "Угол атаки" - с.600.
2. Дукаревич Б. Махолет - потомок планера. - «Изобретатель и рационализатор», №8, 1981 г., с.18.
3. Киселев В.А. Машущий полет: быть или не быть. Проф. МАИ В.А.Киселев отвечает на вопросы редакции ж. "Авиапанорама", янв.-февр. 2003 г..
4. Тихонравов М.К. Полет птиц и машины с машущими крыльями. - М.: Оборонгиз, 1949. Применение теории квазистационарной аэродинамики к проблеме машущего полета в кн. проф., академика.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТАНДЕМНЫХ МАШУЩИХ КРЫЛЬЕВ С АВТОМАТИЧЕСКОЙ ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2007 |
|
RU2350509C2 |
| МАХОЛЕТ | 2008 |
|
RU2369526C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
| МАХОЛЕТ | 2009 |
|
RU2412084C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| СПОСОБ СОЗДАНИЯ НЕСТАЦИОНАРНОГО ВОЛНОВОГО ПОТОКА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ ДЛЯ ИССЛЕДОВАНИЯ РАБОТЫ МАШУЩЕГО КРЫЛА | 2009 |
|
RU2433380C2 |
| МАХОЛЕТ | 2012 |
|
RU2488525C1 |
Изобретение относится к области авиации. Устройство машущих навстречу друг другу тандемно расположенных крыльев летательного аппарата с приводом содержит соединенные в противофазе кривошипно-шатунно-коромысловые механизмы, двуплечими рычагами-коромыслами которых являются лонжероны или силовые кромки податливых на кручение крыльев. Кривошипы механизмов посредством трехшарнирных шатунов-подкосов связаны с парами коромысел-лонжеронов каждого крыла так, что возможны возвратно-угловые перемещения с отставанием друг от друга. Технический результат - расширение арсенала технических средств. 1 ил.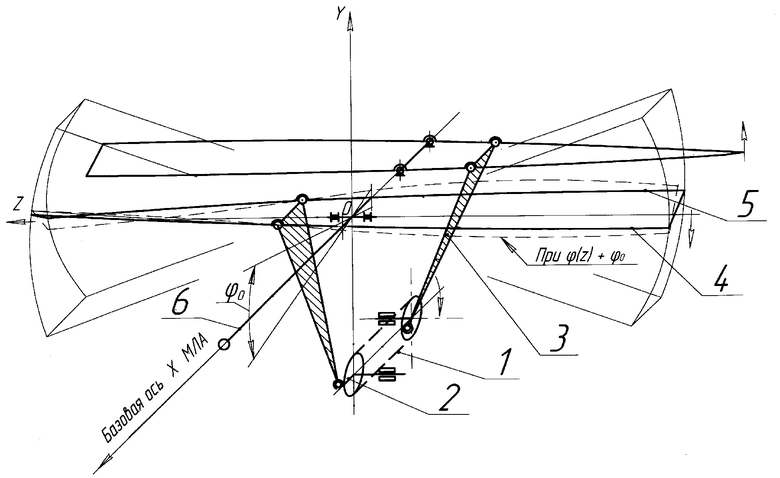
Устройство машущих навстречу друг другу тандемно расположенных крыльев летательного аппарата с приводом, содержащее податливые на кручение крылья и соединенные в противофазе кривошипно-шатунно-коромысловые механизмы, двуплечими рычагами-коромыслами которых являются лонжероны или силовые кромки податливых на кручение крыльев, отличающееся тем, что кривошипы механизмов посредством трехшарнирных шатунов-подкосов связаны с парами коромысел-лонжеронов каждого крыла так, что возможны возвратно-угловые перемещения с отставанием друг от друга, что создает циклический перекос лонжеронов между собой, вызывающий закономерную крутку крыльев в процессе махания для обеспечения углов атаки сечений крыла в потоке, а управляемый угол установки оси махания крыльев создает независимый от машущего движения дополнительный перекос крыла относительно оси верхних шарниров шатуна для управления по крену.
| Авиапанорама | |||
| Янв-февр., 2003, с.38-40 | |||
| МАХОЛЕТ | 2001 |
|
RU2222476C2 |
| US 3508840 A, 28.04.1970 | |||
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ПРЯМОГО ДЕЙСТВИЯ | 1991 |
|
RU2021627C1 |
| Устройство для испытания электрической прочности изоляции кабельных изделий | 1989 |
|
SU1704112A1 |
| Одновинтовой насос | 1988 |
|
SU1622629A1 |
| GB 334981 A, 18.09.1930. | |||

