Изобретение относится к радиотехнике и может быть использовано в многопозиционных радиолокационных системах (МПРЛС), а также в автоматических радиолокационных и связных комплексах (АРЛСК).
Многопозиционные радиолокационные системы (МПРЛС) - это системы состоящие, например, из отдельных РЛС, расположенных в различных точках пространства (позициях) и объединенных линиями связи (каналами передачи информации) с пунктом обработки информации.
Многопозиционные радиолокационные системы обладают существенными преимуществами по сравнению с традиционными однопозиционными радиолокационными системами такими как:
- возможность формирования сложных пространственных зон обзора;
- лучшее использование энергии в радиолокационной системе;
- большая точность измерения местоположения целей в пространстве;
- повышение помехозащищенности по отношению к активным и пассивным помехам, а также увеличение надежности выполнения тактической задачи.
[Бакулев П.А. Радиолокационные системы. Учебник для вузов. - М.: Радиотехника, 2004, стр. 20, 21].
Существуют также Радиолокационные и связные комплексы (АРЛСК). Радиолокационные и связные комплексы это системы, состоящие из нескольких радиолокационных постов. Часть радиолокационных постов, без обслуживающего персонала (операторов) располагаются на некотором расстоянии от поста, в котором находятся операторы. Радиолокационные посты без операторов автоматически передают информацию о воздушной обстановке вокруг себя и о техническом состоянии РЛС на пост, где находятся операторы. Автоматические радиолокационные и связные комплексы (АРЛСК) применяются для наблюдения за воздушным пространством в труднодоступных районах (http://pvo.guns.ru/rtv/nitel/arlsk.htm).
При разработке многопозиционных радиолокационных систем и радиолокационных и связных комплексов возникает задача повысить их скрытность, живучесть, т.е. уменьшить возможность обнаружения и уничтожения радиолокационных систем. Одним из способов повышения живучести является мобильность.
Для обмена данными как в радиолокационных и связных комплексах, так и в многопозиционных радиолокационных системах необходимо наличие линий связи между отдельными РЛС и пунктом обработки информации. Создание линий связи не представляет принципиальных трудностей. Так при объединении траекторий или единичных замеров могут применяться линии малой пропускной способности, вплоть до телефонных каналов (Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993 стр. 30). Для организации подобной связи необходима аппаратура телефонной связи на РЛС и пункте обработки информации.
Однако радиолокационные системы с подобными линиями связи (телефонные линии связи) являются маломобильными в связи с тем, что при изменении местоположения РЛС требуется прокладка и подключение телефонной линии, что занимает много времени. Кроме того, радиолокационные системы с телефонными линиями связи имеют малую помехозащищенность и малую живучесть, так как подобные линии связи могут быть легко повреждены. Телефонные линии связи также имеют малую пропускную способность, а при необходимости объединения радиосигналов в многопозиционных радиолокационных системах необходимы широкополосные линий связи (Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993 стр. 13, 30).
Широкополосные линии связи для радиолокационной системы можно выполнить с использованием, например, радиорелейной аппаратуры, которая обладает большой пропускной способностью, высокой помехозащищенностью и скрытностью. Радиорелейная линия связи должна быть от каждой РЛС (координаты которой известны до момента установления связи) до пункта обработки информации (координаты которого тоже известны до момента установления связи). Соответственно аппаратура устанавливается на каждой РЛС и на пункте обработки информации. Количество полукомплектов радиорелейного оборудования на пункте обработки информации равно количеству РЛС, входящих в многопозиционную радиолокационную систему. При этом РЛС должна располагаться на расстоянии прямой видимости от пункта обработки информации, так как, в противном случае для установления линии связи необходимо использовать либо промежуточные радиорелейные станции, либо пассивные ретрансляторы (Калинин А.И, Черенкова Е.Л., Распространение радиоволн и работа радиолиний, М., Связь, 1971 с 214). Расположение радиорелейной аппаратуры на расстоянии (интервале) прямой видимости требует, как правило, установку высоких радиорелейных антенных опор, что приводит еще и к дополнительному увеличению стоимости многопозиционных радиолокационных систем. При увеличении расстояния или при отсутствии прямой видимости требуется организация дополнительных радиорелейных пролетов, что еще более увеличивает стоимость многопозиционных радиолокационных систем. Установка антенных опор и установление даже однопролетного радиорелейного канала связи занимает много времени (в том числе и ориентация (юстировка) антенн относительно друг друга), что отрицательно сказывается на мобильности радиолокационных систем с радиорелейными линиями связи. Для соединения отдельных РЛС друг с другом необходимо организовать радиорелейную линию между РЛС, что еще больше снизит мобильность радиолокационных систем, за счет организации дополнительных радиорелейных линий связи.
В известных радиолокационных и связных комплексах (АРЛСК) радиолокационные посты, без операторов автоматически передают информацию о воздушной обстановке вокруг себя и о техническом состоянии РЛС на пост, где находятся операторы. В данных радиолокационных и связных комплексах (АРЛСК) для связи между постами используется системы тропосферной связи. Данные линии связи выполнены с использованием отдельных неподвижных (не вращающихся) остронаправленных связных антенн, к которым подключены приемные и передающие устройства, таким образом, связь между постами осуществляется при помощи только неподвижной (не вращающейся) остронаправленной связной антенны, работающей как на прием, так и на передачу (http://pvo.guns.ru/rtv/nitel/arlsk.htm). Перед началом использования (до момента установления связи) необходимо, зная координаты РЛС и поста, где находятся операторы, произвести установку и юстировку связных антенн, которая с учетом габаритов занимает много времени, что отрицательно сказывается на мобильности радиолокационных систем. Для связи между собой радиолокационных постов, координаты которых должны быть известны, необходимо произвести установку и юстировку дополнительных связных антенн, что еще больше увеличивает время развертывания всего комплекса. Следовательно, использование неподвижной (не вращающейся) остронаправленной связной антенны подобный АРЛСК не может обеспечить высокой мобильности, а также связи между РЛС напрямую.
Более близким аналогом, выбранным в качестве прототипа в связи со сходством выполняемой технической задачи является многопозиционная РЛС. Многопозиционная РЛС состоит из отдельных подвижных РЛС и пункта обработки информации. Каждая подвижная РЛС содержит приемную и передающую аппаратуру связи (включая остронаправленную антенну связи). Пункт обработки информации также включающем в себя приемную и передающую аппаратуру связи (в том числе остронаправленные антенны).
В многопозиционной РЛС осуществляется передача информации управления с пункта обработки информации, а также передача служебной и радиолокационной информации с отдельных подвижных РЛС на пункт обработки информации. В рассматриваемой многопозиционной РЛС пункт обработки информации соединен с каждой из подвижных РЛС отдельной линией связи. Подвижные РЛС не соединены друг с другом напрямую. Каждая линия связи при такой архитектуре является дуплексной, (А.И. Сенин, И.В. Крючков, С.В. Чернавский, С.И. Нефедов, Г.А. Лесников, МНОГОАДРЕСНАЯ ШИРОКОПОЛОСНАЯ СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ ДЛЯ МНОГОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ., ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. «Приборостроение». 2012, УДК 621.396.4 с 53-59).
В данном случае обеспечивается высокая мобильность отдельных РЛС, скрытность, и широкополосность (высокая пропускная способность) линий связи.
Однако указанная радиолокационная система может работать только в том случае, когда РЛС располагается на расстоянии прямой видимости от пункта обработки информации, это обусловлено, как способом решения поставленной задачи, так и использованием высоких частот для связи между отдельными подвижными РЛС и пунктом обработки информации. Необходимо также знать координаты РЛС и пункта обработки информации до момента установления связи и постоянно отслеживать местоположение РЛС при перемещении. Кроме того, в данной системе подвижные РЛС не могут быть соединены друг с другом напрямую.
Технический результат предлагаемого технического решения -повышение живучести радиолокационных систем за счет увеличения мобильности путем уменьшения времени установления соединения подвижных РЛС с пунктом обработки информации, а также использования в качестве пункта обработки информации любой из подвижных РЛС за счет соединения подвижных РЛС друг с другом напрямую.
Дополнительный технический результат - повышение устойчивости работы линии связи в случае использовании тропосферной связи.
Указанный технический результат достигается тем, что многопозиционная радиолокационная система, состоящая из отдельных подвижных РЛС и пункта обработки информации, соединенных линиями связи, причем линии связи выполнены с использованием на передачу передающего устройства (для подвижных РЛС - передающего устройства локационного канала), присоединенного к узконаправленной антенне (для подвижных РЛС - к антенне локационного канала), способной изменять азимутальное направление главного лепестка диаграммы направленности, а на прием -приемное устройство, присоединенное к неподвижной антенне, имеющей широкую (круговую) диаграмму направленности в горизонтальной плоскости.
Дополнительный технический результат достигается тем, что на прием используется не менее 2-х приемников, каждый из которых присоединен к своей антенне, имеющих широкую (круговую) диаграмму направленности в горизонтальной плоскости и узкую диаграмму направленности в вертикальной плоскости, причем максимумы диаграмм направленности антенн разнесены по углу места.
Во всех приведенных радиолокационных системах использованы линии связи, включающие в себя приемную и передающую аппаратуру и отдельные остронаправленные связные антенны, которые работают и на прием и на передачу, что позволяет организовать связной канал только между двумя пунктами (например, между отдельной подвижной РЛС и пунктом обработки информации), при этом необходимо точно знать координаты РЛС и постоянно отслеживать ее местоположение при перемещении. В предлагаемой системе использованы линии связи, выполненные с использованием на передачу передающих устройств локационного канала, включая узконаправленную антенну локационного канала, а на прием - приемник, присоединенный к антенне, имеющей широкую (круговую) диаграмму направленности в горизонтальной плоскости. В заявляемой системе в связном канале на передачу используется часть аппаратуры (передающее устройство и остронаправленная антенна, например, локационного канала), а на прием в связном канале - другая часть аппаратуры, используемая только в связном канале (приемник, присоединенный к антенне, имеющей широкую (круговую) диаграмму направленности в горизонтальной плоскости). В этом предлагаемая система также отличается и от радиорелейного соединения point-to-multipoint (https://ru.wikipedia.org/wiki/%D0%A2%D0%BE%D1%87%D0%BA%D0%B0%D0%BC%D0%BD%D0%B3%D0%BE%D1%82%D0%BE%D1%87%D0%BA%D0%B0#cite_note-book1-2).
Построение каналов связи с использованием известных систем не позволяет повысить живучесть радиолокационных систем за счет увеличения мобильности и возможности использования в качестве пункта обработки информации любой из подвижных РЛС. Таким образом, только совместное использование заявленных признаков позволяет достигнуть заявленных целей.
Все это позволяет сделать вывод о соответствии заявляемого изобретения критерию патентоспособности «изобретательский уровень».
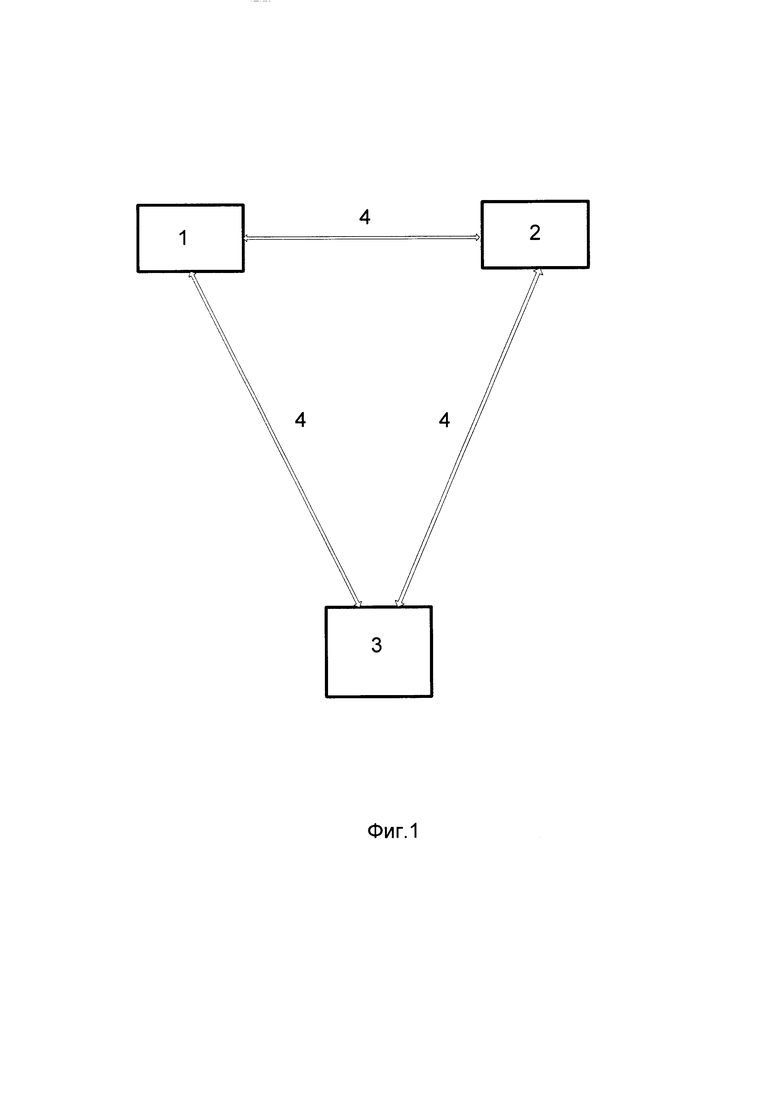
На фиг. 1 показана структурная схема многопозиционной РЛС.
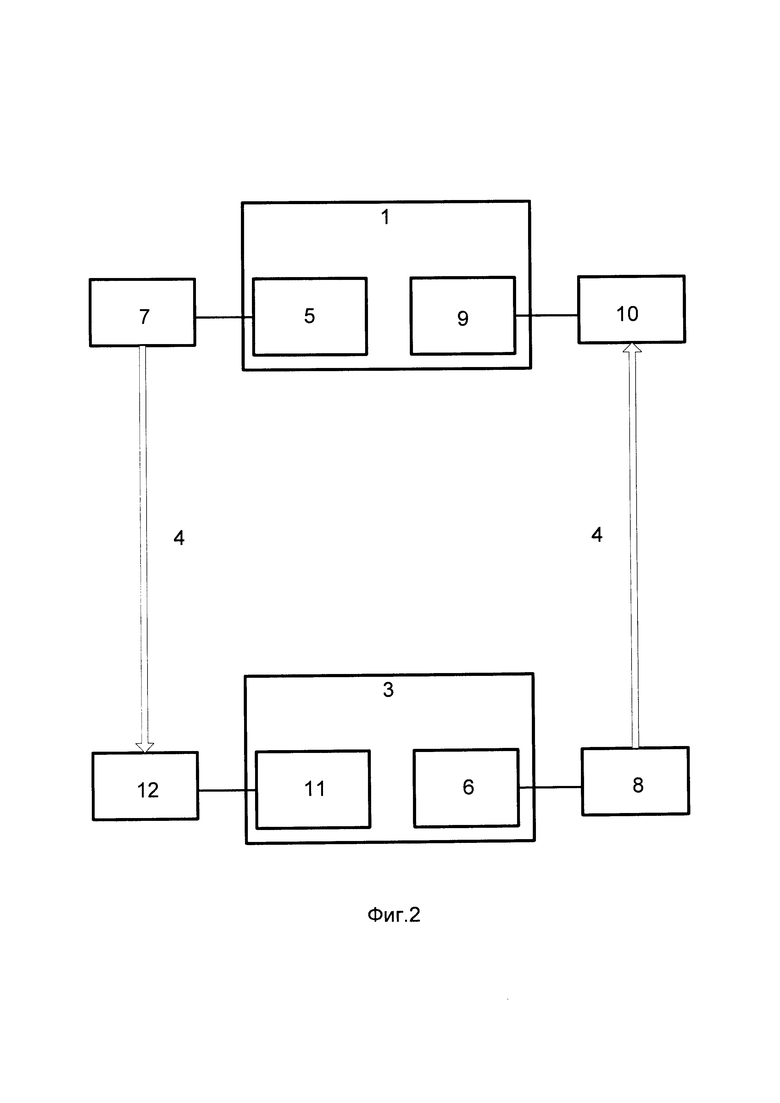
На фиг. 2 показана структурная схема отдельной РЛС (пункт обработки информации).
На чертеже и в тексте приняты следующие обозначения:
1 - отдельная подвижная РЛС;
2 - отдельная подвижная РЛС;
3 - пункт обработки информации;
4 - линия связи;
5 - передающее устройство локационного канала подвижной РЛС;
6 - передающее устройство пункта обработки информации;
7 - узконаправленная антенна локационного канала подвижной РЛС;
8 - узконаправленная антенна пункта обработки информации;
9 - приемное устройство линии связи подвижной РЛС;
10 - связная антенна, имеющая широкую (круговую) диаграмму направленности в горизонтальной плоскости, подвижной РЛС;
11 - приемное устройство линии связи пункта обработки информации;
12 - связная антенна пункта обработки информации, имеющая широкую (круговую) диаграмму направленности в горизонтальной плоскости.
Многопозиционная радиолокационная система (см. фиг. 1) содержит отдельные подвижные РЛС 1, 2 и пункт обработки информации 3, соединенные линиями связи 4. Линии связи 4 (см. фиг. 2) выполнены с использованием на передачу передающих устройств локационного канала подвижной РЛС 5, и с использованием на передачу передающих устройств пункта обработки информации 6, а также узконаправленной антенны локационного канала подвижной РЛС 7 и узконаправленной антенны пункта обработки информации 8, приемного устройства подвижной РЛС 9, присоединенного к связной антенне 10, имеющей широкую (круговую) диаграмму направленности в горизонтальной плоскости и приемного устройства линии связи пункта обработки информации 11, присоединенного к связной антенне пункта обработки информации 12, имеющей широкую (круговую) диаграмму направленности в горизонтальной плоскости. Таким образом, отдельные подвижных РЛС 1,2 и пункт обработки информации 3 имеют сходное оборудование для линий связи 4.
Многопозиционная радиолокационная система работает следующим образом.
Рассмотрим работу линиями связи 4 между отдельной подвижной РЛС 1 и пунктом обработки информации 3.
Подвижная РЛС.
Передающее устройство каждой отдельной подвижной РЛС 1 формирует сигналы 2-х видов:
первый вид - радиолокационные сигналы и служат для обзора пространства и определения характеристик обнаруженных целей (координат, скорости и т.п.);
второй вид - связные сигналы служат для передачи информации от РЛС на пункт обработки информации 2.
Радиолокационные сигналы первого вида, сформированные передающим устройством локационного канала 5, излучаются узконаправленной антенной локационного канала 7. Отраженные от цели радиолокационные сигналы принимаются также узконаправленной антенной локационного канала 7, затем направляются в приемное устройство локационного канала (на фиг. не показано). Радиолокационные сигналы излучаются РЛС в заданном секторе (чаще всего, РЛС работают в режиме «кругового обзора»).
Связные сигналы (сигналы второго вида), сформированные передающим устройством локационного канала 5, также излучаются узконаправленной антенной локационного канала 7, но в направлении пункта обработки информации 3, либо в направлении другой подвижной РЛС2 (координаты которых известны до момента установления связи).
Сигналы от пункта обработки информации 3, (другой подвижной РЛС) принимаются связной антенной 10, имеющей широкую (круговую) диаграмму направленности в горизонтальной плоскости, и направляются в приемное устройство линии связи 9 подвижной РЛС 1.
Пункт обработки информации 3.
Связные сигналы отдельной подвижной РЛС1 поступают на связную приемную антенну 12 пункта обработки информации 3 и затем направляются в приемное устройство линии связи 11 пункта обработки информации 3. Связная приемная антенна 12 пункта обработки информации 3.имеет широкую (круговую) диаграмму направленности в горизонтальной плоскости. Для передачи информации от пункта обработки информации 3 на РЛС 1 используется передающее устройство 6, подключенное к узконаправленной антенне 8.
Координаты РЛС1 передаются в пункт обработки информации 3 до момента установления двусторонней связи, то есть, до момента, когда сигналы от РЛС1 передаются в пункт обработки информации 3, а сигналы от пункта обработки информации 3 передаются в РЛС1. Следовательно, нет необходимости в юстировке приемной антенны пункта обработки информации 3.
Использование узконаправленных антенн на передачу и на прием В случае использования узконаправленных антенн на передачу и на прием (для отдельной подвижной РЛС - антенны локационного канала) необходимо, чтобы были известны координаты отдельных подвижных РЛС, пункта обработки информации. Кроме того, чтобы пункт обработки информации и другие подвижной РЛС работали в диапазоне локационного канала подвижной РЛС, необходима также синхронизация вращения антенн (необходимо чтобы антенны были направлены друг на друга) и синхронизация импульсов передатчиков пункта обработки информации (других подвижных РЛС), т.к. в режиме передачи приемник, как правило, отключен от антенны.
Использование узконаправленных антенн на передачу, а для приема -антенн, которые имеют широкие (круговую) диаграмму направленности в горизонтальной плоскости, позволяет быстро организовывать линию связи при смене позиции подвижной РЛС1, так как, в подвижной РЛС1 не надо производить юстировку связных антенн, что значительно сокращает время организации линии связи, в пункте обработки информации 3, нет необходимости определять местоположение подвижной РЛС1 до начала организации линии связи, (координаты местоположения подвижная РЛС1 передает уже в процессе передачи информации в пункте обработки 3), и также не надо производить юстировку связных антенн в пункте обработки 3. Таким образом, использование заявленной многопозиционной РЛС позволяет повысить мобильность радиолокационных систем и за счет этого увеличить их живучесть.
При выходе из строя пункта обработки информации отдельные РЛС, расположенные в различных точках пространства не могут быть объединены в единую систему со всеми присущими ей преимуществами по сравнению с традиционными однопозиционными радиолокационными системами. Следовательно, для того чтобы повысить живучесть многопозиционной радиолокационной системы необходим дополнительный (запасной) пункт обработки информации. Так как отдельные подвижные РЛС 1, 2 и пункт обработки информации 3 имеют сходное оборудование для линий связи 4, то, следовательно, при выходе из строя пункта обработки информации эти функции пункта обработки информации в заявленной системе в качестве пункта обработки информации может выполнять одна из подвижных РЛС. Причем передача функций управления от пункта обработки информации к отдельной подвижной РЛС не займет много времени, так как в многопозиционной радиолокационной системы подвижные РЛС объединены линиями связи между собой напрямую. Возможность использования в качестве пункта обработки информации подвижной РЛС также позволяет повысить живучесть многопозиционной радиолокационной системы.
В связи с тем, что РЛС часто располагаются на значительном расстоянии, для связи удобно использовать тропосферные линии связи, основанные на рассеянии радиоволн на неоднородностях тропосферы (Калинин А.И., Черенкова Е.Л. Распространение радиоволн и работа радиолиний, М., Связь, 1971 стр. 251). При использовании таких линий связи возможно установление связи между РЛС (между РЛС и пунктом обработки информации), расположенными на значительных расстояниях (Черенкова Е.Л., Чернышев О.В. Распространение радиоволн, Учебник для вузов связи. М., Радио и связь, 1984, стр. 167). Кроме того, тропосферные линии связи трудно обнаружить, и по ним сложно определить местонахождение радиолокационных систем. Однако при дальнем тропосферном распространении происходят изменения уровня сигнала («быстрые» и «медленные» замирания сигналов). Для устранения в основном быстрых (но часто и медленных) замираний используется многократный прием за счет углового разнесения диаграмм направленности в вертикальной плоскости (Калинин А.И., Черенкова Е.Л. Распространение радиоволн и работа радиолиний, М., Связь, 1971 стр. 261-264). В предлагаемом техническом решении этого можно добиться, используя не менее 2-х приемников, каждый из которых присоединен к своей антенне, каждая из которых имеет широкую (круговую) диаграмму направленности в горизонтальной плоскости и узкую диаграмму направленности в вертикальной плоскости, причем максимумы диаграмм направленности антенн разнесены по углу места. Причем это могут быть 2 независимые (конструктивно) антенны, может быть использована одна антенна, но с двумя или более выходами. Получение разных угловых положений главного лепестка диаграмм направленности в вертикальной плоскости обеспечивается различным амплитудно-фазовым распределением (АФР) сигналов, поступающих от излучателей на выходы антенны.
Использование 2-х независимых каналов (2-х приемников, каждый из которых присоединен к своей антенне, каждая из которых имеет узкую диаграмму направленности в вертикальной плоскости, с разнесенными по углу места максимами диаграмм направленности), позволяет принимать сигналы «от 2-х «изолированных» переизлучающих объемов», изменение характеристик которых происходит статистически независимо и, следовательно, быстрые замирания в каждом канале некоррелированы. При угловом разнесенном приеме может также наблюдаться некоррелированность и медленных замираний (Калинин А.И., Черенкова Е.Л. Распространение радиоволн и работа радиолиний, М., Связь, 1971 стр. 264). Это и позволяет повысить устойчивость работы линии связи.
Таким образом, использование данного изобретения позволит значительно повысить живучесть многопозиционных радиолокационных систем за счет увеличения мобильности, за счет использования в качестве пункта обработки информации любой из подвижных РЛС, а также повысить устойчивость работы линии связи.
Изобретение относится к радиотехнике и может быть использовано в многопозиционных радиолокационных системах (РЛС), а также в автоматических радиолокационных и связных комплексах. Технический результат изобретения - повышение надежности радиолокационных систем за счет увеличения мобильности путем уменьшения времени установления соединения подвижных РЛС с пунктом обработки информации, а также использования в качестве пункта обработки информации любой из подвижных РЛС за счет соединения подвижных РЛС друг с другом напрямую. Дополнительный технический результат - повышение устойчивости работы линии связи в случае использования тропосферной связи. Система состоит из отдельных подвижных РЛС и пункта обработки информации, соединенных линиями связи, причем линии связи выполнены с использованием на передачу передающего устройства, присоединенного к узконаправленной антенне, способной изменять азимутальное направление главного лепестка диаграммы направленности, а на прием - приемного устройства, присоединенного к неподвижной антенне, имеющей широкую (круговую) диаграмму направленности в горизонтальной плоскости. На прием используется не менее двух независимых приемников, каждый из которых присоединен к своей антенне, имеющих широкую (круговую) диаграмму направленности в горизонтальной плоскости и узкую диаграмму направленности в вертикальной плоскости, причем максимумы диаграмм направленности антенн разнесены по углу места. 1 з.п. ф-лы, 2 ил.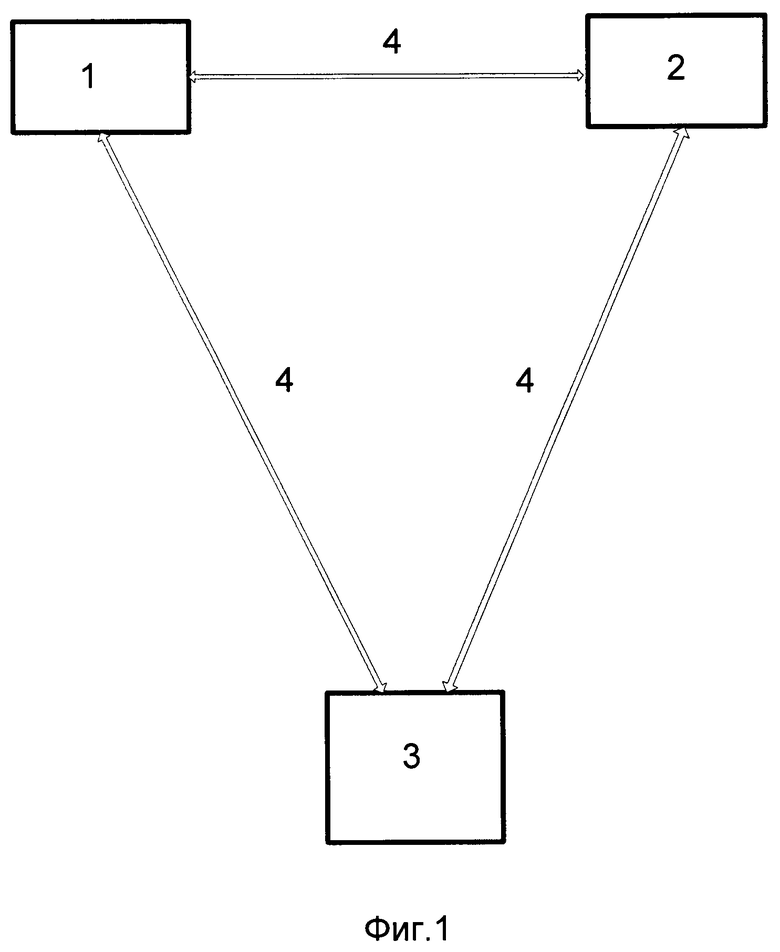
1. Многопозиционная радиолокационная система, состоящая из отдельных подвижных радиолокационных станций, пункта обработки информации, соединенных между собой линиями связи, отличающаяся тем, что линии связи выполнены с использованием на передачу передающих устройств, присоединенных к узконаправленным антеннам, способным изменять азимутальное направление главного лепестка диаграммы направленности, а на прием - приемных устройств, присоединенных к неподвижным антеннам, имеющим широкую (круговую) диаграмму направленности в горизонтальной плоскости.
2. Многопозиционная радиолокационная система по п. 1, отличающаяся тем, что на прием используется не менее двух независимых приемников, работающих на одной частоте, каждый из которых присоединен к своей независимой антенне, имеющей широкую (круговую) диаграмму направленности в горизонтальной плоскости и узкую диаграмму направленности в вертикальной плоскости, причем максимумы диаграмм направленности антенн разнесены по углу места.
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ С ПРИМЕНЕНИЕМ РАДИОФОТОННЫХ ЭЛЕМЕНТОВ | 2018 |
|
RU2686456C1 |
| Способ радиолокационного обзора пространства и многопозиционный комплекс для его осуществления | 2017 |
|
RU2667485C1 |
| СПОСОБ ПАССИВНОЙ РАДИОЛОКАЦИИ | 2014 |
|
RU2560089C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2013 |
|
RU2542330C1 |
| СПОСОБ УСТРАНЕНИЯ ОШИБКИ УГЛОВОЙ ОРИЕНТАЦИИ АНТЕНН В СИСТЕМЕ СВЯЗИ "ТОЧКА-ТОЧКА" | 2017 |
|
RU2665808C1 |
| Полуавтоматический станок для полирования кромок пера лопатки газовой турбины | 1959 |
|
SU128727A1 |
| Способ припайки пластин из твердого сплава | 1952 |
|
SU103935A1 |
| Устройство для поддержания в холодном состоянии напитков и пищевых продуктов, например, пива, сметаны и пр. | 1957 |
|
SU112564A1 |
| US 2017153325 A1, 01.06.2017 | |||
| Устройство для преобразования сигналов фотоэлектрического датчика | 1982 |
|
SU1105758A1 |

