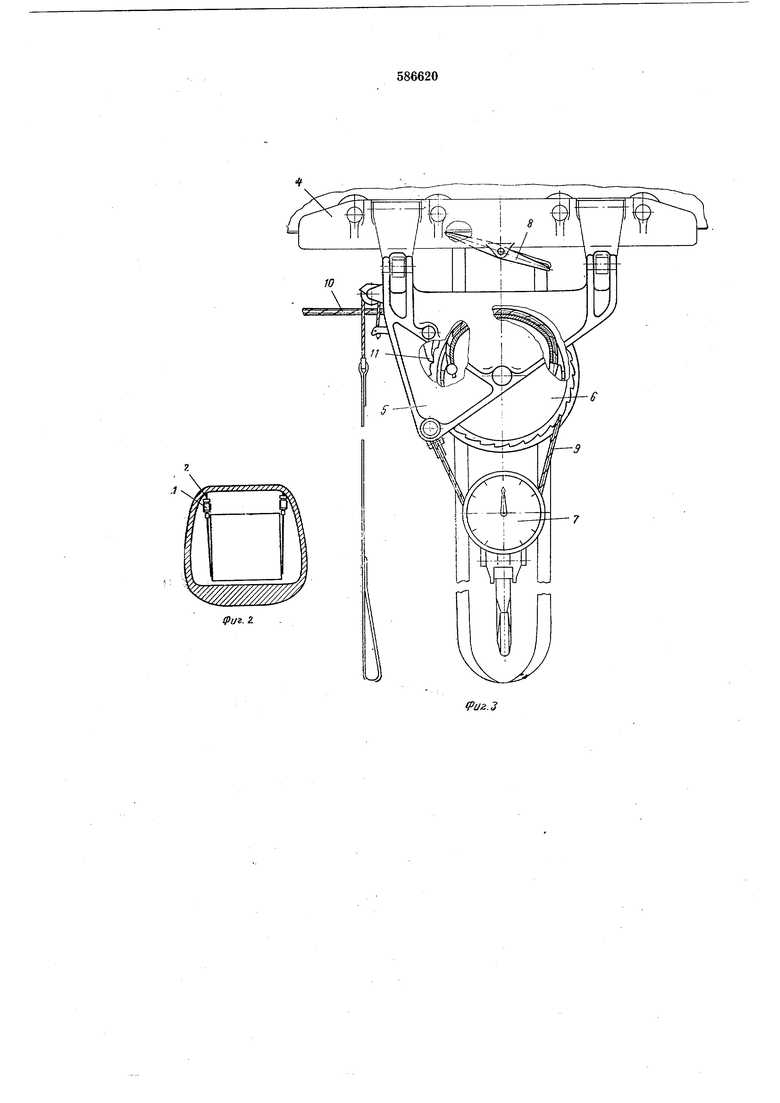
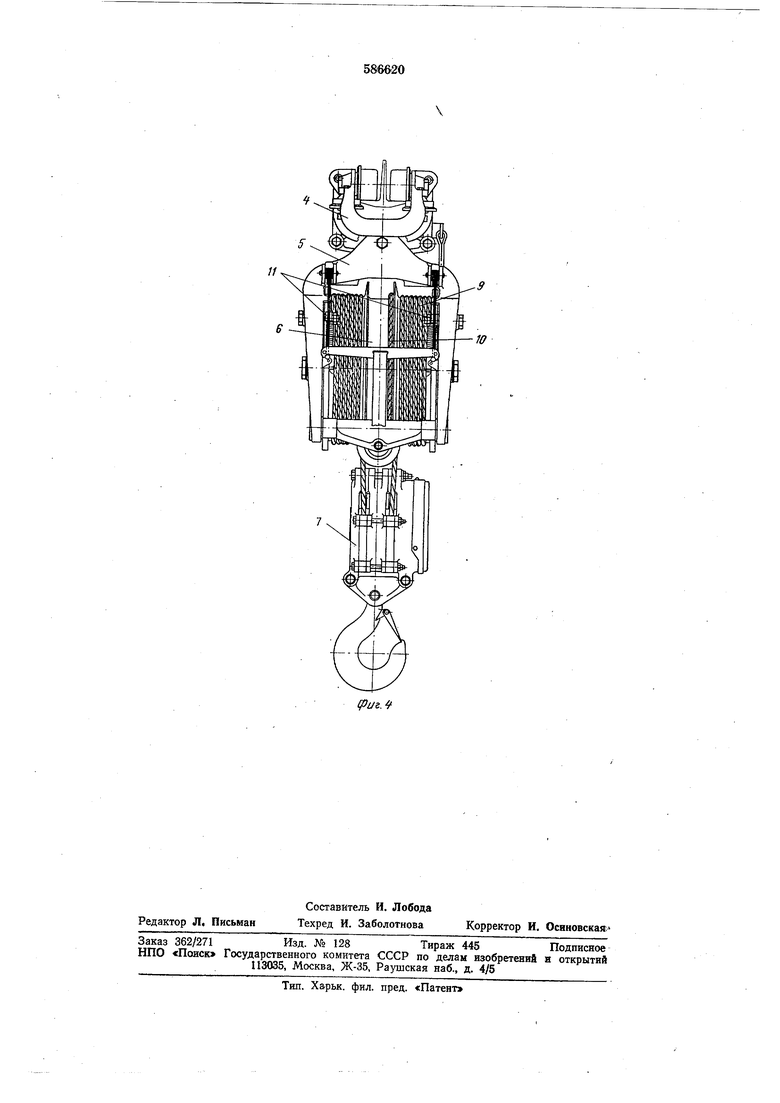
ционной катушки 6 предназначены для намотки ветвей троса 9 подъем.а и опускания груза, средн яя - для намотки троса 10 электролебедки 3. Хреновые колеса катушки 6 фиксируются собачками 11, имеющимися на корнусе блока 5. Управление унором 8 и собачками 11 механизMia 1 - дистанционное.
При погрузке груза в грузовую кабину летательного аппарата оба механизма 1 располагают на-д грузом, устанавливают каретки 4 на унор 8 от движения вперед, опускают блоки динамометра 7 вниз и захватывают крюками груз.
Включают электролебедки 3 на уборку тросов 9. При этом катушки 6 вр1аш,аются, тросы 9 наматываются на их крайние секпии и груз по циимается. Собачки 11 постоянно стопорят катушки 6.
Подняв груз ва нужную высоту, выключают электролебедки 3, снимают каретки 4 .с упоров 8 и, включив электролебедки на уборку тросов 10, втягивают груз в грузовую кабину к месту его размещения.
Для опускания груза ставят каретку 4 На упор 8, выбирают слабину тросов 10, включив электролебедки на уборку тросов, выключают собачки 11 и включают электролебедки на выпуск тросов 10.
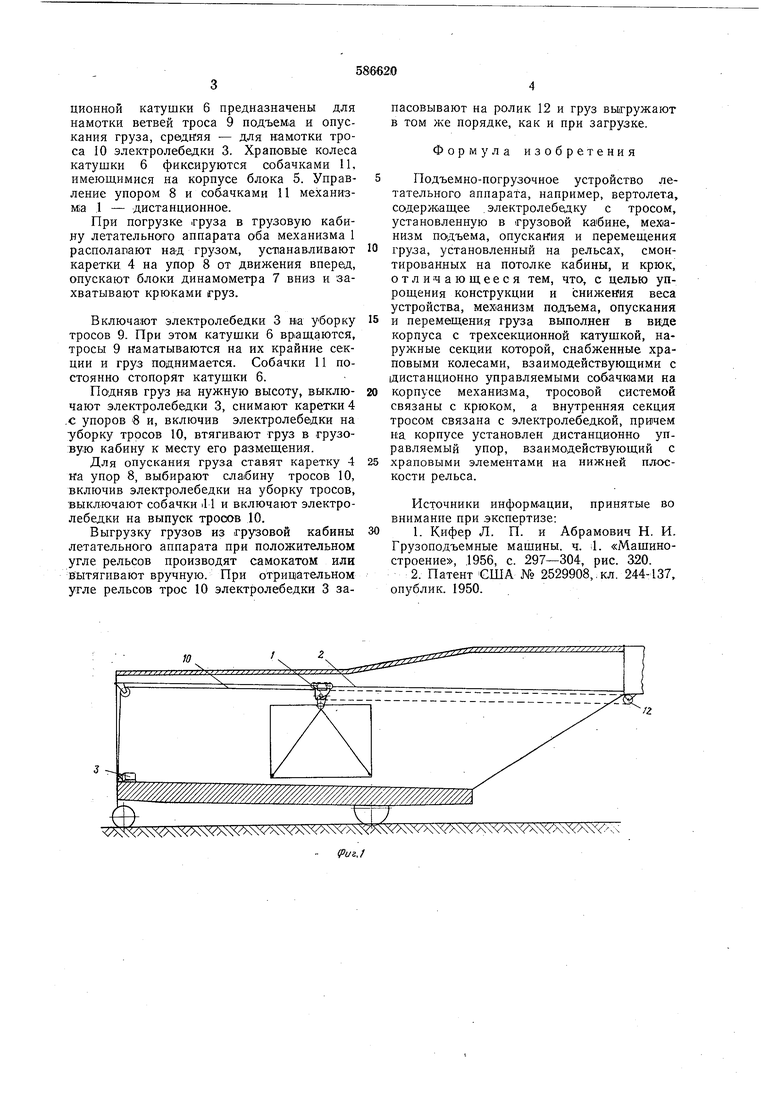
Выгрузку грузов из грузовой кабины летательного аппарата при положительном угле рельсов производят самокатом или вытягивают вручную. При отрицательном угле рельсов трос 10 электролебедки 3 занасовывают на ролик 12 и груз выгружают в том же порядке, как и при загрузке.
Формула изобретения
Подъемно-ногрузочное устройство летательного аппарата, например, вертолета, содержащее .электролебедку с тросом, установленную в грузовой кабине, Mexiaнизм подъема, опускания и перемещения груза, установленный на рельсах, смонтированных на потолке кабины, и крюк, отличающееся тем, что, с целью упрощения конструкции и снижен ия веса устройства, механизм подъема, опускания и перемещения груза выполнен в ввде корпуса с трехсекционной катушкой, наружные секции которой, снабженные храповыми колесами, взаимодействующими с дистанционно управляемыми собачками на корпусе механизма, тросовой системой связаны с крюком, а внутренняя секция тросом связана с электролебедкой, причем на корпусе установлен дистанционно управляемый упор, взаимодействующий с храповыми элементами на нижней плоскости рельса.
Источники информ ации, нринятые во внимание при экспертизе:
1.Кифер Л. П. и Абрамович Н. И. Грузоподъемные машины, ч. I. «Машиностроение, .1956, с. 297-304, рис. 320.
2.Патент €ША № 2529908,.кл. 244-137, опублик. 1950.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШВАРТОВОЧНО-ТАКЕЛАЖНОЕ УСТРОЙСТВО ВЕРТОЛЁТА | 2023 |
|
RU2819338C1 |
| Беспилотный летательный аппарат для эвакуации раненых и доставки грузов | 2024 |
|
RU2829580C1 |
| УНИВЕРСАЛЬНЫЙ БОРТОВОЙ ПОДЪЕМНИК ДЛЯ ПАССАЖИРОВ С ОГРАНИЧЕННЫМИ ВОЗМОЖНОСТЯМИ | 2019 |
|
RU2726211C1 |
| УСТРОЙСТВО ГРУЗОВОЙ ЗОНЫ ДИРИЖАБЛЯ | 2021 |
|
RU2783321C1 |
| Грузозахватное устройство | 1977 |
|
SU783179A1 |
| СПОСОБ РАБОТЫ ГРУЗОВОЙ ТЯГОВОЙ ЛЕБЕДКИ И ГРУЗОВАЯ ТЯГОВАЯ ЛЕБЕДКА | 2016 |
|
RU2630266C1 |
| ТРАНСПОРТАБЕЛЬНЫЙ БОРТОВОЙ ПОДЪЁМНИК | 2015 |
|
RU2602269C2 |
| Устройство для механической очистки через смотровые люки грязе- и шламоотстойников | 1961 |
|
SU140381A1 |
| Складная эстакада для погрузки-разгрузки вагонов и фургонов | 2018 |
|
RU2691485C1 |
| Подвесной конвейер | 1980 |
|
SU933564A1 |