Область техники, к которой относится изобретение
Настоящее изобретение относится к области позиционирования, в частности, локализации мобильных устройств связи во время их развертывания на местности, например, при развертывании спасательных команд, подразделений быстрого реагирования, строительных бригад или туристических групп.
Уровень техники
В классической системе позиционирования применяют приемники спутниковой геолокализации типа GPS или аналогичных систем (ГЛОНАСС, Galiléo…), которыми оснащены устройства связи членов группы. Эти приемники GPS позволяют локализовать каждого члена группы в наземной системе координат при помощи их широты, долготы и высоты над уровнем моря. Устройства связи могут передавать свои положения по радио и, следовательно, информировать координатора об их соответствующем положении. Однако эта система имеет недостатки, связанные с технологией GPS. Действительно, она может не работать или может быть неточной по причине факторов окружающей среды, таких как гроза, высокая влажность или радиопомехи. Приемники GPS могут также не работать в закрытых местах, таких как здания или подземные коммуникации. Поскольку время развертывания локализации при помощи GPS связано со временем, необходимым для того, чтобы приемник GPS принял сигналы от достаточного числа спутников для обеспечения определения своего положения, может пройти несколько минут, прежде чем устройство можно будет позиционировать. Наконец, ухудшение точности приемника GPS при использовании в гражданских целях может оказаться неприемлемым для некоторых задач, которые требуют точного позиционирования в здании, например, при спасательных операциях или во время работы пожарных.
Задача, решаемая изобретением
Изобретение призвано предложить способ относительного позиционирования устройств связи, которые можно развернуть быстро и независимо от качества или от наличия охвата системой спутниковой геолокализации зоны, в которой находятся устройства.
Раскрытие изобретения
В связи с этим изобретением предложен способ позиционирования относительно координирующего устройства связи, группы подчиненных устройств связи, содержащей по меньшей мере первое, второе, третье и четвертое подчиненные устройства связи, причем координирующее устройство связи и подчиненные устройства связи являются подвижными относительно друг друга, каждое устройство связи содержит передатчик/приемник UWB и средства беспроводной цифровой связи с координирующим устройством, при этом каждое подчиненное устройство содержит внутренние часы, синхронизированные с внутренними часами координирующего устройства, чтобы определять период общей связи, при этом способ содержит следующие этапы:
- во время подготовительной фазы координирующее устройство передает через средства беспроводной цифровой связи в каждое подчиненное устройство специальную таблицу идентификации, содержащую идентификатор, подпись UWB и время задержки передачи, и передает через средства беспроводной цифровой связи таблицы идентификации каждого устройства в другие подчиненные устройства;
и во время рабочей фазы,
- каждое устройство передает свою подпись UWB, причем эта передача происходит по истечении времени задержки передачи, начиная с начала периода связи;
- каждое устройство анализирует подписи UWB, переданные другими устройствами, и определяет расстояния, отделяющие это устройство от каждого из других устройств;
- каждое подчиненное устройство передает в координирующее устройство расстояния, отделяющие это подчиненное устройство от других устройств, причем эту передачу осуществляют при помощи средств беспроводной цифровой связи;
- координирующее устройство определяет относительные положения подчиненных устройств.
Этот способ позволяет определять положение мобильных устройств связи между собой, не прибегая к стационарным системам маяков или не учитывая наличие охвата спутниками, что обеспечивает быстрое развертывание устройств связи на неизвестной местности при помощи легкого и портативного оборудования.
Объектом изобретения является также устройство позиционирования, содержащее средства обработки данных и средства запоминания, внутренние часы, оснащенные средствами их синхронизации, передатчик/приемник UWB и средства беспроводной цифровой связи, при этом устройство выполнено с возможностью осуществления заявленного способа.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания частных и не ограничительных вариантов осуществления изобретения.
Краткое описание чертежей
Это описание представлено со ссылками на прилагаемые чертежи, на которых:
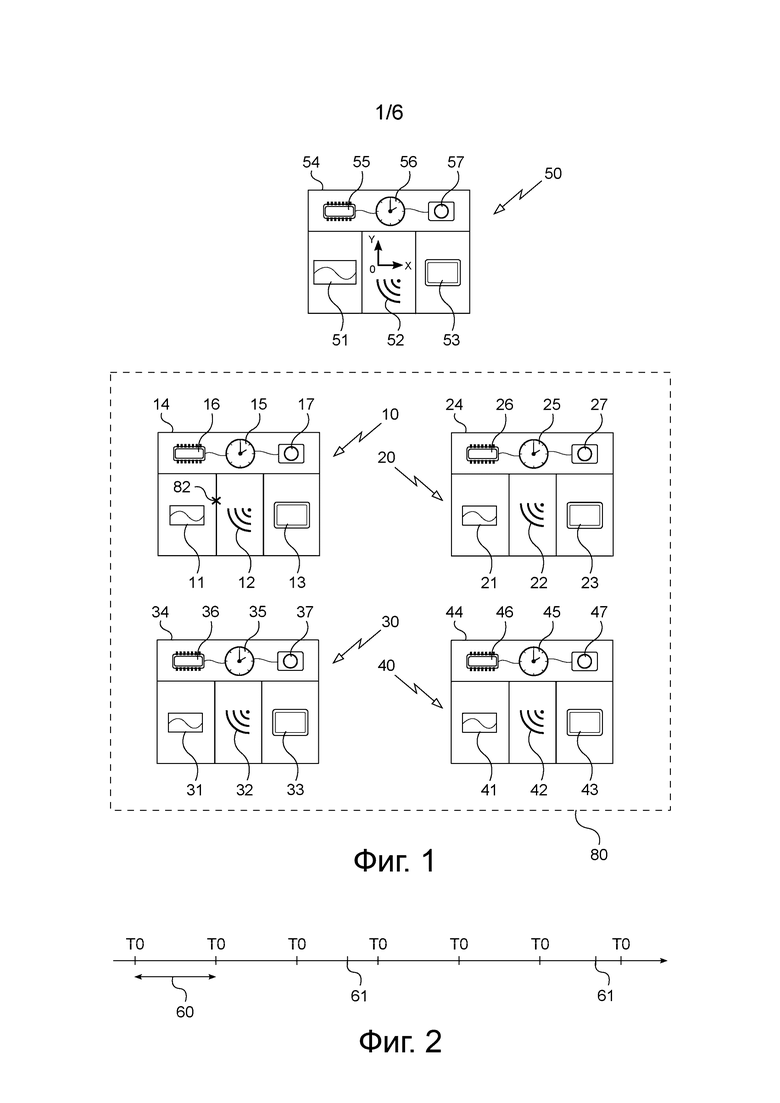
фиг. 1 - схематичный вид устройств связи в соответствии с изобретением;
фиг. 2 - схема распределения во времени связи между устройствами связи, показанными на фиг. 1;
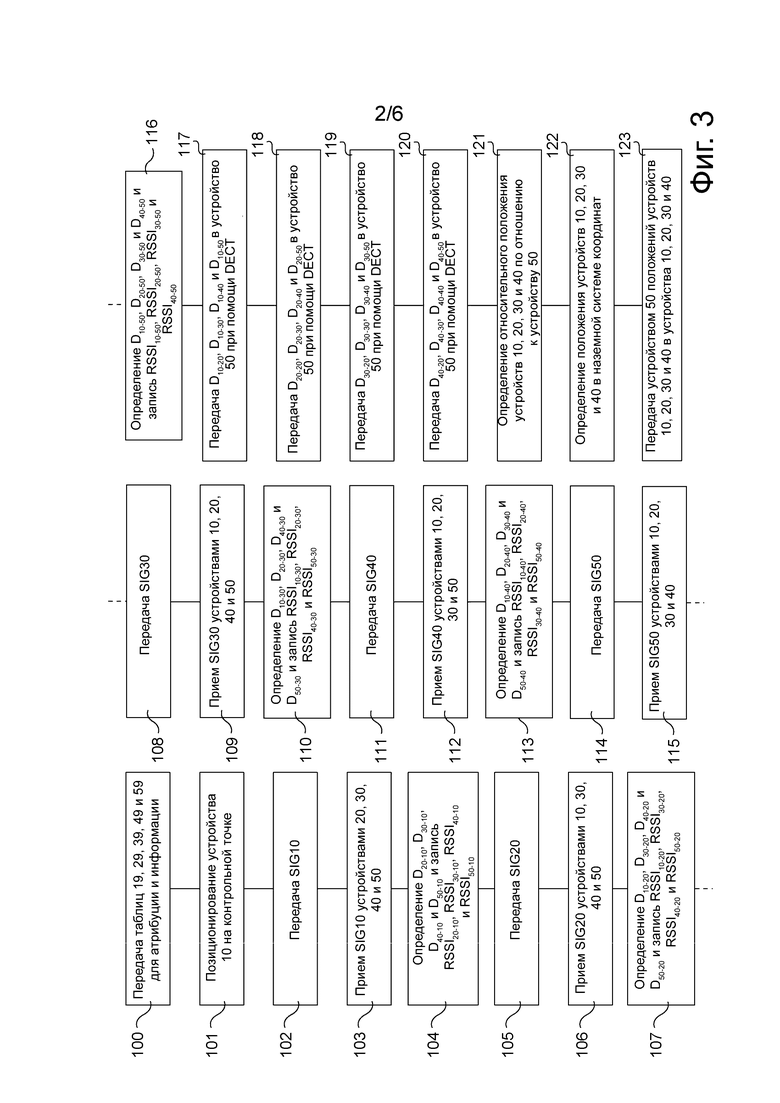
фиг. 3 - блок-схема этапов первого варианта осуществления заявленного способа позиционирования;
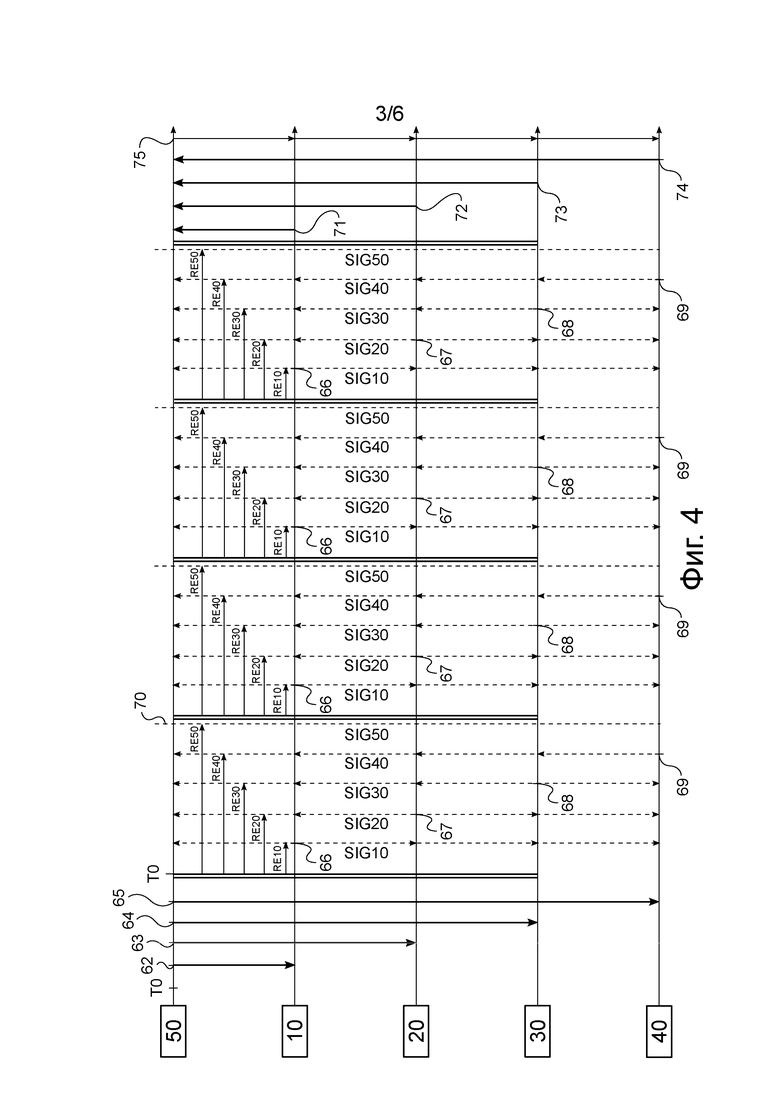
фиг. 4 - схема обменов между устройствами связи, показанными на фиг. 1;
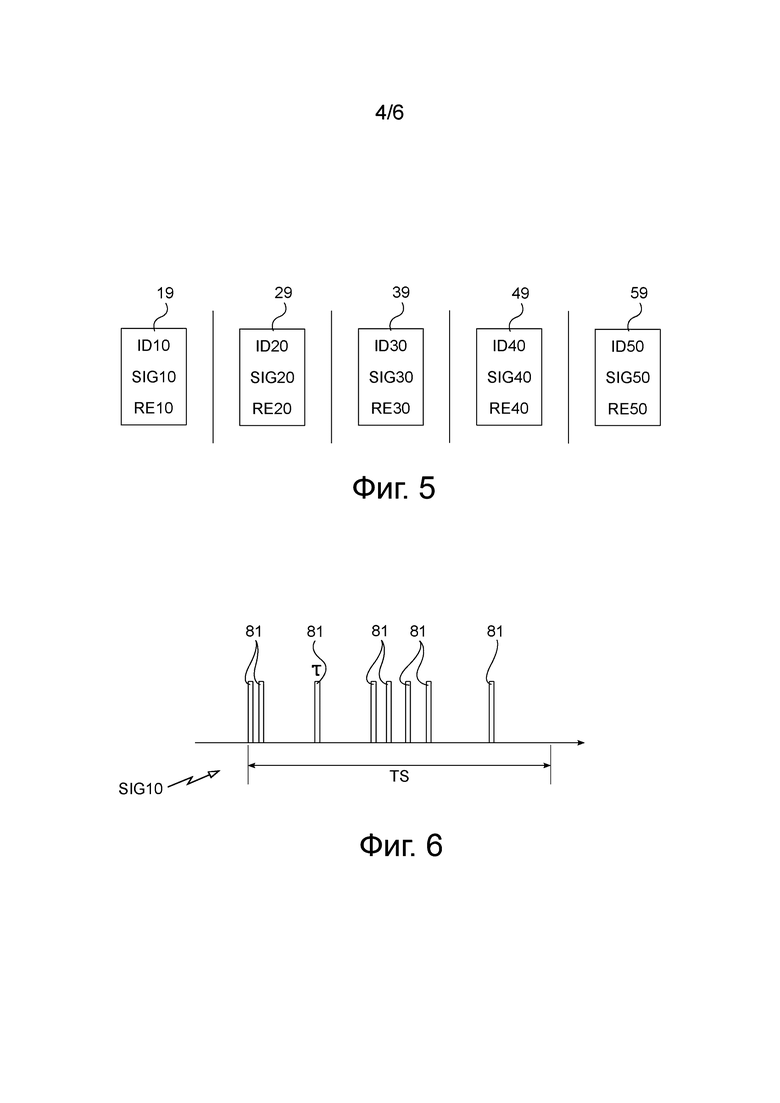
фиг. 5 - схематичный вид таблиц идентификации устройств связи, показанных на фиг. 1;
фиг. 6 - схематичный вид подписи UWB одного из устройств связи, показанных на фиг. 1;
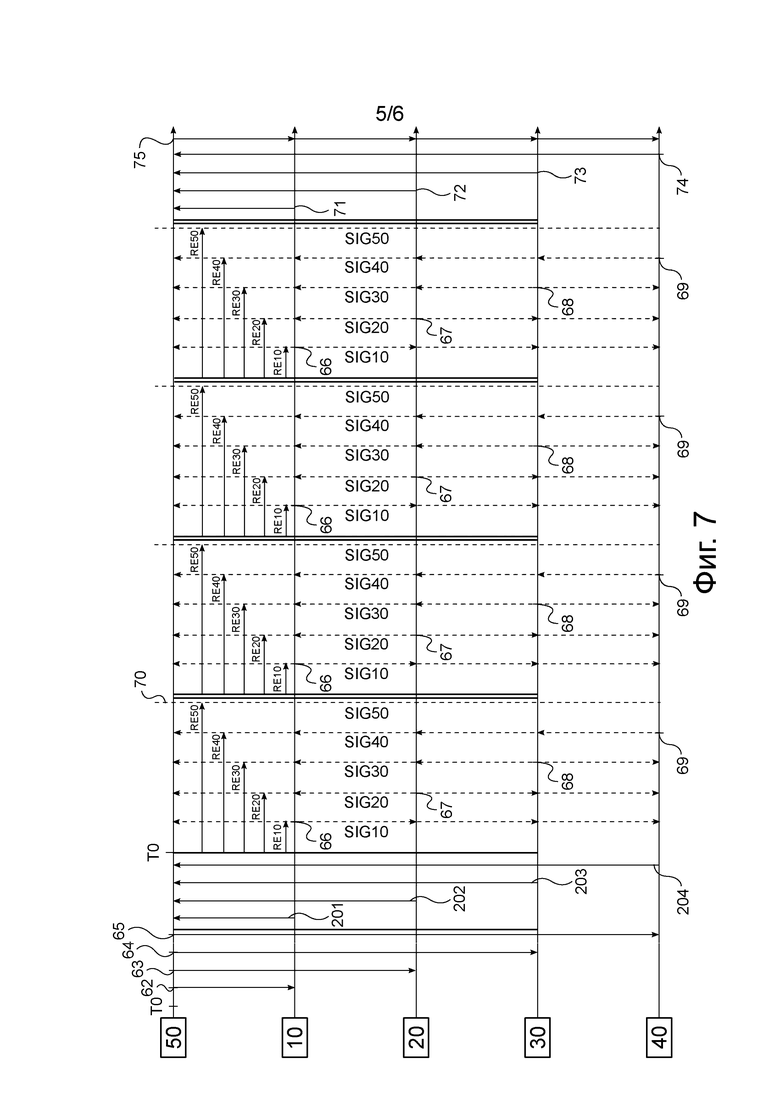
фиг. 7 - схема обменов между устройствами связи согласно частному варианту осуществления;
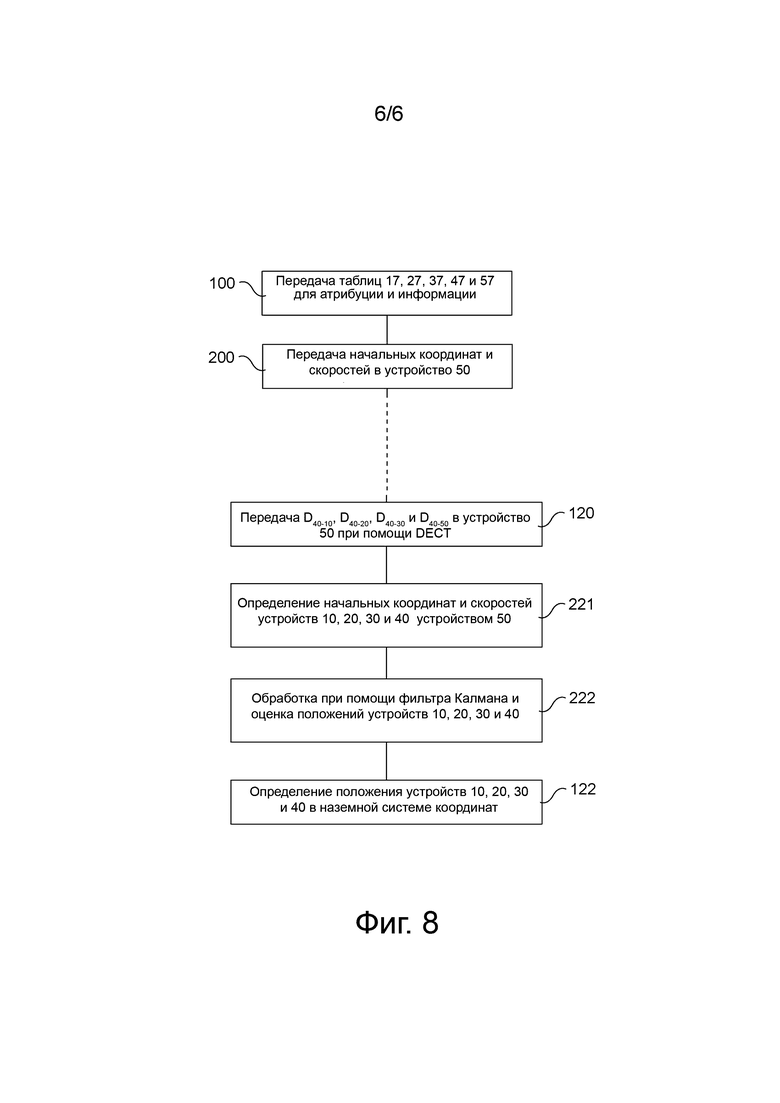
фиг. 8 - блок-схема этапов частного варианта осуществления заявленного способа позиционирования.
Осуществление изобретения
Как показано на фиг. 1, заявленный способ позиционирования описан для применения при относительном позиционировании группы из четырех подчиненных устройств связи, содержащей первое устройство 10, второе устройство 20, третье устройство 30 и четвертое устройство 40, относительно координирующего устройства 50 связи.
Устройство 50 содержит сверхширокополосный (или UWB от “Ultra-Wide Band”) передатчик/приемник 51, передатчик/приемник типа Digital Enhanced Cordless Telephone (DECT) 52 и приемник GPS 53, связанные с блоком 54 обработки данных, содержащим микроконтроллер 55, ритм работы которого задают внутренние часы 56, а также память 57. В рамках настоящей заявки сигнал UWB занимает полосу пропускания не менее 500 МГц.
Первое устройство 10 содержит передатчик/приемник UWB 11, передатчик/приемник типа DECT 12, приемник GPS 13 и блок 14 обработки данных, содержащий внутренние часы 15, микроконтроллер 16, а также память 17.
Второе устройство 20, третье устройство 30 и четвертое устройство 40 содержат, каждое, передатчик/приемник UWB 21 (соответственно 31 и 41), передатчик/приемник типа DECT 22 (соответственно 32 и 42), приемник GPS 23 (соответственно 33 и 43) и блок 24 (соответственно 34 и 44) обработки данных, содержащий внутренние часы 25 (соответственно 35 и 45), микроконтроллер 26 (соответственно 36 и 46), а также память 27 (соответственно 37 и 47).
Блок 14 обработки устройства 10 содержит четыре предсказательных фильтра типа «фильтров Калмана» 18.20, 18.30, 18.40 и 18.50 соответственно, предназначенные для оценки и сглаживания расстояний D10-20, D10-30, D10-40 и D10-50, отделяющих устройство 10 от устройств 20, 30, 40 и 50. Получение этих измерений будет подробнее описано ниже. Использование таких предсказательных фильтров позволяет устройству 10 производить в любой момент оптимизированную оценку расстояний, которая учитывает, в частности, момент, в который было произведено каждое из измерений расстояний D10-20, D10-30, D10-40 и D10-50.
Блоки обработки 24, 34, 44 и 54 тоже оснащены предсказательными фильтрами, предназначенными для оценки и сглаживания расстояний, отделяющих устройства 20, 30, 40 и 50 от других устройств 10, 20, 30, 40 и 50.
Устройства 10, 20, 30, 40 и 50 являются автономными по энергии и, следовательно, мобильными.
Связь между устройствами 10, 20, 30, 40 и 50 происходит при помощи передатчиков/приемников DECT 12, 22, 32, 42 и 52 в соответствии с режимом мультиплексирования, называемым множественным доступом с распределением во времени (AMRT) за период общей связи, называемый фреймом 60, повторяющийся циклически, продолжительность которого является фиксированной и известной для каждого устройства связи (фиг. 2). Каждое устройство 10, 20, 30, 40 и 50 имеет общую временную точку отсчета Т0, соответствующий началу фрейма 60. Эта временная точка отсчета Т0 поддерживается синхронной между устройствами путем циклической передачи устройством 50 сигнала синхронизации DECT 61. Устройства 10, 20, 30 и 40 синхронизируют свои соответствующие внутренние часы 15, 25, 35 и 45 по этому сигналу синхронизации 61. Что касается устройства 50, оно синхронизирует свои собственные внутренние часы 56 по внутренним часам спутниковой системы GPS, от которой оно получает сигналы. Для синхронизации своих соответствующих внутренних часов 15, 25, 35 и 45 устройства 10, 20, 30 и 40 используют также контрольный сигнал, поступающий от их соответствующих приемников GPS 13, 23, 33 и 43, когда они оказываются в состоянии уловить сигнал GPS. Сигнал синхронизации 61 позволяет корректировать, в случае необходимости, синхронизацию устройств 10, 20, 30 и 40 между собой.
Согласно первому варианту осуществления изобретения, показанному на фиг. 1-6, подчиненные устройства 10, 20, 30 и 40 находятся внутри замкнутой структуры, в данном случае здания 80, а устройство 50 находится снаружи здания 80.
Во время подготовительной фазы 100 координирующее устройство 50 направляет сигнал DECT 62 (показанный сплошной стрелкой) в первое устройство 10, передавая для атрибуции таблицу 19 идентификации специально для устройства 10. Эта таблица 19 идентификации содержит следующие элементы: идентификатор ID10, подпись UWB SIG10 и время задержки передачи RE10. Идентификатор ID10 соответствует в данном случае целому числу. Подпись UWB SIG10 показана на фиг. 6 и представляет собой последовательность не периодических импульсов продолжительностью Ts, состоящую из восьми сверхкоротких импульсов 81 унитарной продолжительности τ, в данном случае равной 0,5 наносекунды. Время задержки передачи RE10 соответствует времени, в данном случае равном одной миллисекунде, разделяющему общую временную точку отсчета Т0, отмечающую начало фрейма 60, и начало передачи устройством 10 подписи UWB SIG10. Сигнал DECT 62 содержит также, для информации, таблицы идентификации 29, 39, 49 и 59 устройств 20, 30, 40 и 50. Эти таблицы идентификации 29, 39, 49 и 50 содержат идентификаторы ID20, ID30, ID40 и ID50, подписи UWB SIG20, UWB SIG30, UWB SIG40 и UWB SIG50, а также соответствующее время задержки передачи RE20, RE30, RE40 и RE50 устройств 20, 30, 40 и 50. Значения времени задержки передачи RE20, RE30, RE40 и RE50 в данном случае составляют соответственно две, три, четыре и пять миллисекунд. Затем координирующее устройство 50 связи направляет в подчиненное устройство 20 связи сигнал DECT 63, который содержит таблицу идентификации 29 для атрибуции, а также таблицы идентификации 19, 39, 49 и 59 для информации. После сигнала DECT 63 координирующее устройство 50 связи направляет в подчиненное устройство 30 связи сигнал DECT 64, который содержит таблицу идентификации 39 для атрибуции, а также таблицы идентификации 19, 29, 49 и 59 для информации. После сигнала DECT 64 координирующее устройство 50 связи направляет в подчиненное устройство 40 связи сигнал DECT 65, который содержит таблицу идентификации 49 для атрибуции, а также таблицы идентификации 19, 29, 39 и 59 для информации.
Каждое устройство 10, 20, 30, 40 и 50 имеет при этом средства для идентификации подписей UWB других устройств. Время задержки передачи RE10, RE20, RE30, RE40 и RE50 позволяет избежать «коллизии» передач подписей UWB SIG10, SIG20, SIG30, SIG40 и SIG50 устройств 10, 20, 30, 40 и 50. «Коллизия» передач соответствует ситуации, в которой два устройства передают свои подписи в перекрывающие друг друга периоды, что может помешать этим двум устройствам принимать сигнал от другого устройства и может также помешать приему сигналов другими устройствами.
В соответствии с предварительным этапом 101 определения относительного положения первого устройства 10 относительно устройства 50, устройство 10 позиционируют в контрольной точке 82 здания 80. Устройство 50 знает точное положение контрольной точки 82 по ее координатам GPS. Например, устройство 10 можно точно позиционировать на контрольной точке 82 при помощи плана здания 80.
Способ позиционирования относительно устройства 50 в соответствии с изобретением входит после этого в рабочую фазу, содержащую этап 102, на котором устройство 10 передает свою подпись UWB SIG10 при помощи передатчика/приемника UWB 11. На фиг. 4 подпись SIG10 показана пунктирной линией. Эта передача, обозначенная позицией 66, происходит после истечения времени задержки передачи RE10, отсчитываемого от общей временной точки отсчета Т0, отмечающей начало фрейма 60.
Подпись UWB SIG10 принимают соответствующие передатчики/приемники UWB 21, 31, 41 и 51 устройств 20, 30, 40 и 50 (этап 103), которые анализируют эти сигналы и определяют расстояние D20-10, отделяющее устройство 20 от устройства 10, а также расстояния D30-10, D40-10 и D50-10, отделяющие соответственно устройства 30, 40 и 50 от устройства 10 (этап 104). Получение сигнала SIG10 устройствами 20, 30, 40 и 50 сопровождается также измерением и запоминанием каждым принимающим устройством 20, 30, 40 и 50 мощности при его приеме (Received Signal Strength Indication). Каждое принимающее устройство сохраняет в памяти измерения мощности RSSI20-10, RSSI30-10, RSSI40-10 и RSSI50-10, соответствующие мощностям приема сигнала UWB SIG10, измеряемым устройствами 20, 30, 40 и 50. Методы, позволяющие определять расстояния при помощи сигналов UWB, известны специалисту в данной области. В данном случае это определение осуществляют посредством измерения времени распространения сигнала UWB.
Во время этапа 105 устройство 20 передает свою подпись UWB SIG20 при помощи передатчика/приемника UWB 21. Эта передача, обозначенная позицией 67, происходит после истечения времени задержки передачи RE20, отсчитываемого от Т0. Подпись UWB SIG20 принимают соответствующие передатчики/приемники 11, 31, 41 и 51 устройств 10, 30, 40 и 50 (этап 106). Эти устройства определяют расстояния D10-20, D30-20, D40-20 и D50-20, отделяющие соответственно устройства 10, 30, 40 и 50 от устройства 20 (этап 107). Устройства 10, 30, 40 и 50 измеряют и сохраняют в памяти соответственно значения мощности приема RSSI10-20, RSSI30-20, RSSI40-20 и RSSI50-20 сигнала 67.
Этапы 108-116 представляют собой повторение этапов 102-107, применяемых при передаче подписей UWB SIG30, SIG40 и SIG50 в виде сигналов 68, 69 и 70 устройствами связи 30, 40 и 50, а также определение следующих расстояний: D10-30, D20-30, D40-30, D50-30, D10-40, D20-40, D30-40, D50-40, D10-50, D20-50, D30-50 и D40-50. Аналогично, устройства связи сохраняют в памяти мощности приема, соответствующие каждому измерению расстояния.
Устройство 10 сохраняет в своей памяти 17 расстояния D10-20, D10-30, D10-40 и D10-50. Аналогично, расстояния, отделяющее каждое устройство от других устройств, сохраняются в их соответствующей памяти 27, 37, 47 и 57. Этапы 102-116 повторяются (в данном случае четыре раза), и устройства 10, 20, 30, 40 и 50 используют новые определения расстояния для их направления в выделенные предсказательные фильтры блоков обработки 14, 24, 34, 44 и 54 и для уточнения оценок расстояний, отделяющих их от других устройств. Затем эти оценки передаются в устройство 50 при помощи сигнала DECT. Устройство 10 передает расстояния D10-20, D10-30, D10-40 и D10-50 в устройство 50 при помощи сигнала DECT 71 (этап 117) после истечения, начиная от общей временной точки отсчета Т0, времени задержки передачи RE10. Аналогично, устройства 20, 30 и 40 передают свои оценки расстояний в устройство 50 соответственно при помощи сигналов DECT 72, 73 и 74 (этапы 118-120).
На основании этой информации координирующее устройство 50 определяет при помощи перекрытий расстояний в соответствии с методом, аналогичным триангуляции, относительные положения устройств 10, 20, 30 и 40 относительно устройства 50. Это определение можно, например, осуществлять следующим образом.
С устройством 50 связывают плоскую ортогональную систему координат (О, х, у). В этой системе координатами устройства 10 являются (Х10, Y10), координатами устройства 20 являются (Х20, Y20), координатами устройства 30 являются (Х30, Y30), координатами устройства 40 являются (Х40, Y40), и координатами устройства 50 являются (Х50, Y50). Таким образом, получают следующую систему уравнений:
D10-20= ((X20-X10)2+ (Y20-Y10)2)^(1/2);
D10-30= ((X30-X10)2+ (Y30-Y10)2)^(1/2);
D10-40= ((X40-X10)2+ (Y40-Y10)2)^(1/2);
D10-50= ((X50-X10)2+ (Y50-Y10)2)^(1/2);
D20-30= ((X20-X30)2+ (Y20-Y30)2)^(1/2);
D20-40= ((X20-X40)2+ (Y20-Y40)2)^(1/2);
D20-50= ((X20-X50)2+ (Y20-Y50)2)^(1/2);
D30-40= ((X30-X40)2+ (Y30-Y40)2)^(1/2);
D30-50= ((X30-X50)2+ (Y30-Y50)2)^(1/2);
D40-50= ((X40-X50)2+ (Y40-Y50)2)^(1/2).
Расстояния между двумя устройствами получают посредством фильтрации и комбинации измерений, произведенных каждым из соответствующих устройств. Например, расстояние D10-20 определяют путем вычисления среднего значения расстояния D10-20, измеренного устройством 10, и расстояния D20-10, измеренного устройством 20.
В случае, когда положение устройства 10 относительно устройства 20 известно или когда считается, что все устройства находятся в одной горизонтальной плоскости, координирующее устройство 50 может определить положения устройств 20, 30 и 40 относительно своего положения (этап 121) путем решения системы вышеуказанных уравнений, которая в этом случае содержит десять уравнений с шестью неизвестными. Методы решения такой системы, в частности, путем подстановки, известны специалисту в данной области.
Таким образом, относительные положения устройств 10, 20, 30 и 40 по отношению к устройству 50 известны по их координатам в плоской ортогональной системе координат (О, х, у), связанной с устройством 50. Поскольку устройство 50 имеет приемник GPS 53, оно определяет свои координаты GPS в наземной системе координат и осуществляет определение положения устройств 20, 30 и 40 в этой же наземной системе координат по изменению точки отсчета, например, при помощи матрицы перехода (этап 122). Таким образом, можно определить положения устройств 10, 20, 30 и 40 в наземной системе координат, даже если приемники GPS этих устройств не могут принять пригодный к использованию сигнал GPS.
Затем положения устройств 10, 20, 30, 40 и 50 направляются при помощи сигнала DECT 75, передаваемого устройством 50, во все другие устройства (этап 123).
Согласно второму варианту осуществления, устройства 10, 20, 30, 40 и 50 содержат, каждое, альтиметр, и устройства 10, 20, 30 и 40 передают также в устройство 50 измеренную высоту над уровнем моря при помощи передатчиков/приемников DECT 12, 22, 32 и 42. При этом, дополнительно к их относительным положениям на плоскости, устройство 50 может определить относительную высоту устройств 10, 20, 30 и 40. В этом случае осуществляют способ трехмерного позиционирования устройств 10, 20, 30 и 40 относительно устройства 50.
Далее следует описание третьего варианта осуществления изобретения, отличие которого состоит только в предварительном этапе определения относительного положения первого устройства 10 по отношению к устройству 50. Согласно этому этапу 141 определения относительного положения первого устройства 10 по отношению к устройству 50, устройство 10, находящееся внутри здания 80, остается неподвижным, тогда как устройство 50 перемещается, производя при этом регулярные измерения расстояний D50-10 и D10-50, отделяющих устройство 10 от устройства 50. Устройства 10 и 50 производят эти измерения при передаче и приеме подписей SIG10 и SIG50. Для каждого положения устройства 50 блок 54 обработки данных сохраняет в памяти координаты GPS устройства 50 в наземной системе координат, а также соответствующие расстояния D10-50 и D50-10. При этом блок 54 обработки данных может определить посредством триангуляции положение устройства 10 в наземной системе координат. Этапы 100 и 102-122 способа остаются без изменений.
В следующем далее описании четвертого варианта осуществления изобретения этапы, идентичные или аналогичные этапам описанного выше способа, имеют такие же цифровые обозначения.
Этот четвертый вариант осуществления применяют, в частности, для ситуаций, в которых во время предварительной фазы (этап 101 или 141) невозможно определить координаты устройства 10.
Соответствующие блоки обработки 14, 24, 34 и 44 подчиненных устройств 10, 20, 30 и 40 выполнены с возможностью сохранения в памяти последних измеренных положений GPS. Таким образом, при прерывании связи GPS каждое устройство 10, 20, 30 и 40 имеет в памяти свои первоначальные положение и скорость (в виде вектора), то есть положение и скорость до применения заявленного способа (этап, предшествующий этапу 100). Первоначальные положения устройств 10, 20, 30 и 40 имеют соответственно координаты (X10init, Y10init, Z10init), (X20init, Y20init, Z20init), (X30init, Y30init, Z30init), (X40init, Y40init, Z40init). Первоначальные скорости устройств 10, 20, 30 и 40 соответственно обозначены V10init, V20init, V30init, V40init.
Как показано на фиг. 7 и 8, после этапа 100 передачи таблиц устройством 50 каждое устройство 10, 20, 30 и 40 передает соответственно через сигнал DECT 201, 202, 203 и 204 свои первоначальные координаты и скорости в устройство 50 (этап 200). Затем способ позиционирования продолжается в соответствии с этапами 102-120.
Блок 54 обработки использует первоначальные координаты устройств 10, 20, 30, 40 и 50 для вычисления первоначальных расстояний D10-20init, D10-30init, D10-40init, D10-50init, D20-30init, D20-40init, D20-50init, D30-40init и D40-50init.
Этап 221 определения координат устройств 10, 20, 30 и 40 осуществляют посредством минимизации следующей функции стоимости С1:

в которой:
- xk, yk и zk являются координатами устройства k, для которого необходимо определить положение в системе координат (O, X, Y, Z), связанной с устройством 50;
- dn является расстоянием, отделяющим устройство k от устройства n;
- xn, yn и zn являются координатами устройства n, отделенного от устройства k расстоянием dn;
- wn является весовым коэффициентом, связанным с измерением мощности приема сигнала, поступающего от узла с индексом n. wn является, таким образом, функцией RSSIk(n).
При первом определении первоначальные значения переменных xk, yk, zk, а также расстояния dn соответствуют первоначальным координатам устройств, а также их первоначальным расстояниям.
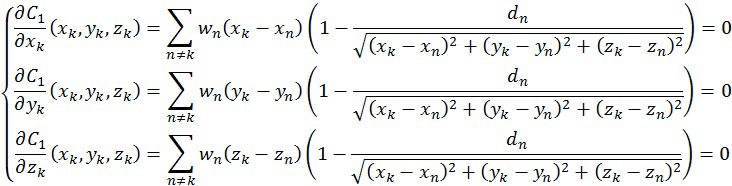
Экстремум функции С1 соответствует искомому положению, его получают путем решения следующей системы уравнений:
То есть:
Эту нелинейную систему можно решить при помощи итерационного метода Ньютона-Рафсона:
Используют следующее положение:
Триплет (xk, yk, zk), отвечающий отношению  получают на основании первоначального значения (xk, yk, zk)0, соответствующего первоначальным значениям (например, (X10init, Y10init, Z10init) в случае применения для определения положения устройства 10), следующим образом:
получают на основании первоначального значения (xk, yk, zk)0, соответствующего первоначальным значениям (например, (X10init, Y10init, Z10init) в случае применения для определения положения устройства 10), следующим образом:

где:  ,
,  , и
, и  является обратной величиной матрицы Джейкоба, связанной с F1 и рассчитаной в точке
является обратной величиной матрицы Джейкоба, связанной с F1 и рассчитаной в точке  :
:
при:









Когда разность  (символ
(символ  обозначает евклидову норму) становится меньше заранее определенного значения ε, итерационный процесс останавливают. Моделирования показывают, что схождение к значению ε=10-15 обеспечивается после числа итераций менее пятнадцати.
обозначает евклидову норму) становится меньше заранее определенного значения ε, итерационный процесс останавливают. Моделирования показывают, что схождение к значению ε=10-15 обеспечивается после числа итераций менее пятнадцати.
При помощи этого метода блок 54 обработки устройства 50 вычисляет (этап 221) координаты и, следовательно, относительные положения устройств 10, 20, 30 и 40. Блок 54 обработки вычисляет также скорость каждого подчиненного устройства 10, 20, 30 и 40. Затем эти данные (положения и скорости) вводят в предсказательный фильтр Калмана 59 блока 54 обработки. Этот фильтр Калмана выдает оценку положений каждого подчиненного устройства относительно устройства 50 (этап 222). После этого осуществляют этап 122, на котором определяют положение устройств 10, 20, 30 и 40 в наземной системе координат при помощи координат GPS устройства 50. После этого устройство 50 передает (этап 122) положения устройств 10, 20, 30 и 40 в другие устройства.
Следующая минимизация функции стоимости С2: 
при которой применяют те же параметры, что и для С1, позволяет тоже определить положения устройств 10, 20, 30 и 40 относительно устройства 50.
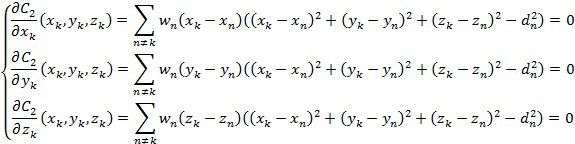
Выявление экстремумов этой функции осуществляют, применяя тот же метод, что и для функции С1. Так, функцию С2 получают путем решения следующей системы уравнений:
то есть:
Эту нелинейную систему можно решить при помощи итерационного метода Ньютона-Рафсона:
Используют следующее положение:
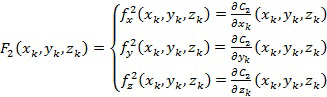
Триплет (xk, yk, zk), отвечающий отношению  получают итеративно на основании первоначального значения (xk, yk, zk)0, соответствующего первоначальным значениям (например, (X10init, Y10init, Z10init) в случае применения для определения положения устройства 10), следующим образом:
получают итеративно на основании первоначального значения (xk, yk, zk)0, соответствующего первоначальным значениям (например, (X10init, Y10init, Z10init) в случае применения для определения положения устройства 10), следующим образом:

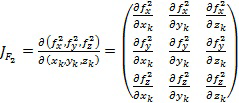
где: , , и  является обратной матрицей для матрицы Джейкоба, связанной с F1 и рассчитаной в точке :
является обратной матрицей для матрицы Джейкоба, связанной с F1 и рассчитаной в точке :
Где:



Когда разность (символ обозначает евклидову норму) становится меньше заранее определенного значения ε, итерационный процесс останавливают. Моделирования показывают, что схождение к значению ε=10-15 обеспечивается после числа итераций менее пятнадцати.
Согласно частному варианту осуществления, подчиненные устройства 10, 20, 30 и 40 остаются в состоянии приема GPS и передают свое положение GPS в устройство 50, если они могут его определить. Эти положения сопровождаются индикатором, характеризующим качество принятых сигналов GPS. Этот индикатор может соответствовать, в частности, измерению RSSI мощности принятого сигнала GPS. Блок 54 обработки производит гибридизацию этих измерений положений GPS, взвешенных при помощи коэффициента, полученного на основании значения RSSI, измеряемого для каждого положения, с оценками, полученными от фильтра Калмана 59, чтобы обновить оценку положения соответствующих устройств.
Таким образом, в соответствии с изобретением подчиненные станции осуществляют, каждая, измерение разделяющих их расстояний, прежде чем передать измеренные таким образом расстояния в координирующую станцию. Координирующая станция содержит средства вычисления, которые позволяют ей определять относительные положения подчиненных устройств на основании расстояний, измеренных и переданных этими подчиненными устройствами. После этого координирующее устройство передает эти положения в подчиненные устройства.
Разумеется, изобретение не ограничивается описанными вариантами осуществления и охватывает любую версию, не выходящую за рамки объема изобретения, определенного формулой изобретения.
В частности:
- хотя в данном случае значения, используемые для определения первоначального значения, позволяющего минимизировать функции стоимости С1 или С2 посредством итерации, соответствуют последним положениям GPS, сохраненным в памяти каждого устройства, изобретение можно применять также для других типов первоначальных значений, в частности, в отсутствие получения последних данных GPS устройствами. Эти первоначальные значения можно, например, выбирать как барицентр других устройств, взвешенный или не взвешенный при помощи коэффициента, полученного на основании значений RSSI;
- хотя в данном случае при операциях минимизации функций стоимости С1 или С2 применяют итерационный метод Ньютона-Рафсона, изобретение можно применять также с применением других, как итерационных так и не итерационных математических методов решения;
- хотя в данном случае подчиненные и координирующее устройства связи содержат передатчик/приемник DECT, изобретение можно применять также для устройств связи, содержащих другие средства беспроводной связи, например, средства связи, соответствующие нормам WIFI, Bluetooth или использующие инфракрасный или ультразвуковой каналы;
- хотя в данном случае подчиненные и координирующее устройства связи содержат приемник GPS, изобретение можно применять также для устройств связи, содержащих другие средства геолокализации, например, такие как приемники для спутниковых систем ГЛОНАСС или GALILEO;
- хотя в данном случае устройства связи оснащены приемником GPS, изобретение можно применять также для устройств связи, не имеющих таких приемников;
- хотя в данном случае подчиненные и координирующее устройства связи содержат микроконтроллер, изобретение можно применять также для устройств связи, содержащих другие средства обработки данных, например микропроцессор;
- хотя в данном случае идентификаторы устройств связи являются целыми числами, изобретение можно применять также с другими типами идентификаторов, например, таких как байты, кодирующие буквы, или последовательности импульсов;
- хотя в данном случае подписи UWB представляют собой последовательность не периодических импульсов, состоящую из восьми сверхкоротких импульсов унитарной продолжительности, равной 0,5 наносекунд, изобретение можно применять также с другими типами подписи UWB, например, такими как последовательность, содержащая другое число импульсов или содержащая более длинные импульсы переменной продолжительности, которая может достигать от 100 пикосекунд до 2,5 наносекунд. Подписи UWB остаются последовательностями сверхкоротких импульсов, промежуток времени между которыми модулируют для кодирования информации. Используемые сигналы UWB не обязательно содержат несущую частоту;
- хотя в данном случае передачу расстояний, измеряемых подчиненными устройствами, в координирующее устройство осуществляют после истечения задержки передачи, изобретение можно применять также для передачи измеряемых расстояний, осуществляемой после истечения времени, отличного от времени, соответствующего задержкам передачи, применяемого для каждого подчиненного устройства;
- хотя в данном случае измерения расстояний между устройствами осуществляют четыре раза перед передачей в координирующее устройство, изобретение можно применять также при другом числе измерений расстояния перед передачей в координирующее устройство, например, один раз, два раза, три раза или более четырех раз;
- хотя в данном случае координирующее устройство передает положения подчиненных устройств после определения их соответствующих положений в наземной системе координат, изобретение можно применять также для передачи относительных положений подчиненных устройств координирующим устройством перед определением их соответствующих положений в наземной системе координат;
- хотя в данном случае устройства определяют значения своей высоты над уровнем моря при помощи альтиметра, изобретение можно применять также с другими средствами оценки высоты над уровнем моря, например, при помощи барометрического датчика;
- хотя в данном случае координирующее устройство находится снаружи здания, в котором перемещаются подчиненные устройства, изобретение можно применять также в случае, когда все координирующие и подчиненные устройства находятся внутри здания или снаружи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СВЯЗИ В AD HOC СЕТИ | 2016 |
|
RU2697833C2 |
| ПОРОШОК ИЗ АБРАЗИВНЫХ ЗЕРЕН | 2009 |
|
RU2481187C2 |
| СУСПЕНЗИЯ АБРАЗИВНЫХ ЗЕРЕН | 2010 |
|
RU2529856C2 |
| СПУТНИКОВЫЕ РАДИОНАВИГАЦИОННЫЕ СИГНАЛЫ С ЦИФРОВОЙ ПОДПИСЬЮ | 2014 |
|
RU2635368C2 |
| СИСТЕМА ОПЛОМБИРОВАНИЯ И СПОСОБ УСТАНОВКИ СИСТЕМЫ ОПЛОМБИРОВАНИЯ | 2017 |
|
RU2723273C1 |
| ГЕНЕРИРОВАНИЕ БИОМЕТРИЧЕСКОЙ ЦИФРОВОЙ ПОДПИСИ ДЛЯ ВЕРИФИКАЦИИ ЛИЧНОСТИ | 2019 |
|
RU2783069C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ | 2017 |
|
RU2697838C1 |
| ВЫСОКОТОЧНАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ | 2017 |
|
RU2657185C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ТРАНСПОРТНОГО СРЕДСТВА, ИСПОЛЬЗУЕМОГО С УБОРОЧНОЙ МАШИНОЙ | 2011 |
|
RU2552960C2 |
| СИСТЕМА И СПОСОБ АКУСТИЧЕСКОЙ ДВУХФАКТОРНОЙ АУТЕНТИФИКАЦИИ | 2003 |
|
RU2313916C2 |
Изобретение относится к области позиционирования. Техническим результатом является повышение точности позиционирования в здании, например, при спасательных операциях или во время работы пожарных. Предложен способ позиционирования, относительно координирующего устройства (50) связи, группы подчиненных устройств (10, 20, 30, 40, 50) связи, при этом способ содержит этапы, на которых: передают при помощи координирующего устройства (50) через средства (12, 22, 32, 42, 52) беспроводной цифровой связи в каждое подчиненное устройство (10, 20, 30, 40, 50) таблицу идентификации; передают при помощи каждого устройства (10, 20, 30, 40, 50) его подпись UWB; анализируют при помощи каждого устройства принятые подписи UWB и определяют расстояния, отделяющие указанное устройство (10,20,30,40,50) от каждого из других устройств (10, 20, 30, 40, 50); передают при помощи каждого подчиненного устройства (10, 20, 30, 40) в координирующее устройство (50) расстояния, отделяющие указанное подчиненное устройство (10, 20, 30, 40) от каждого из других устройств (10, 20, 30, 40, 50); определяют при помощи координирующего устройства (50) относительные положения подчиненных устройств (10, 20, 30, 40). 2 н. и 9 з.п. ф-лы, 8 ил.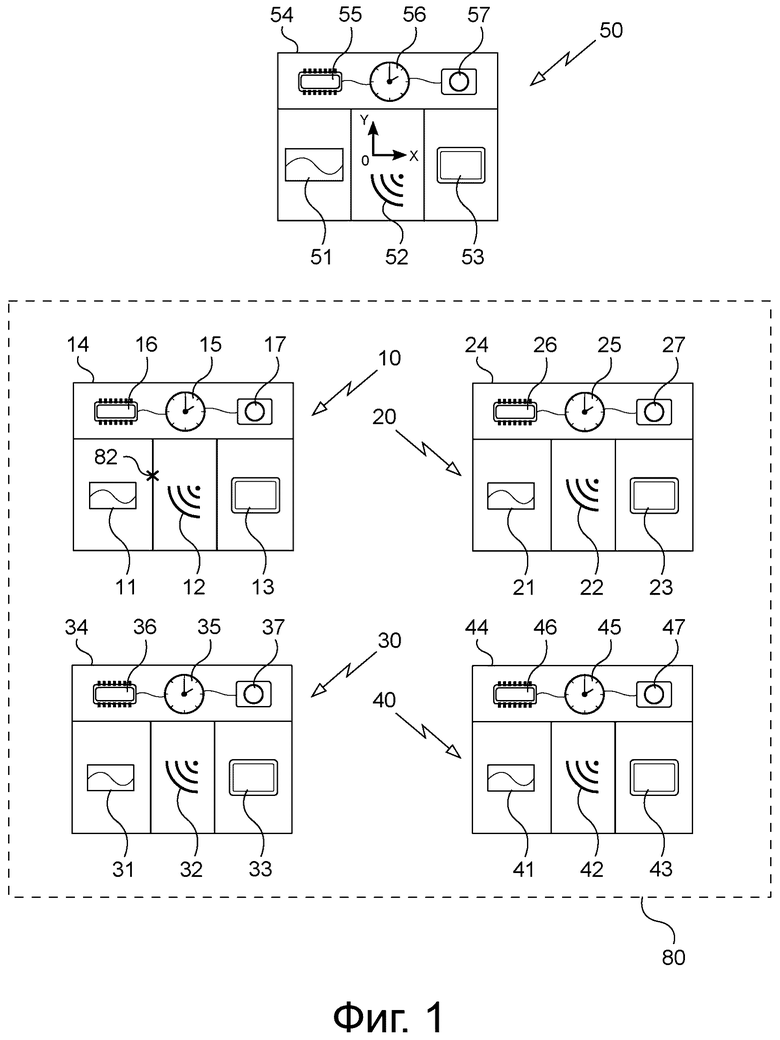
1. Способ позиционирования, относительно координирующего устройства (50) связи, группы подчиненных устройств связи, содержащей по меньшей мере первое (10), второе (20), третье (30) и четвертое (40) подчиненные устройства связи, причем координирующее устройство связи и подчиненные устройства связи являются мобильными друг относительно друга, каждое устройство связи содержит передатчик/приемник UWB (11, 21, 31, 41, 51) и средства (12, 22, 32, 42, 52) беспроводной цифровой связи с координирующим устройством (50), при этом каждое подчиненное устройство (10, 20, 30, 40) содержит внутренние часы (15, 25, 35, 45), синхронизированные с внутренними часами (56) координирующего устройства, для определения периода общей связи (60), при этом способ содержит этапы, на которых:
во время подготовительной фазы (100) передают при помощи координирующего устройства (50) через средства (12, 22, 32, 42, 52) беспроводной цифровой связи в каждое подчиненное устройство (10, 20, 30, 40) таблицу (19, 29, 39, 49, 59) идентификации, содержащую идентификатор (ID10, ID20, ID30, ID40, ID50), подпись UWB (SIG10, SIG20, SIG30, SIG40, SIG50) и время задержки передачи (RE10, RE20, RE30, RE40, RE50), и передают через средства (12, 22, 32, 42, 52) беспроводной цифровой связи таблицу (19, 29, 39, 49, 59) идентификации каждого устройства в другие подчиненные устройства (10, 20, 30, 40);
а во время рабочей фазы
передают при помощи каждого устройства (10, 20, 30, 40, 50) его подпись UWB (SIG10, SIG20, SIG30, SIG40, SIG50), причем передача происходит по истечении времени задержки передачи (RE10, RE20, RE30, RE40, RE50), начиная с начала (T0) периода (60) связи;
анализируют при помощи каждого устройства (10, 20, 30, 40, 50) подписи UWB (SIG10, SIG20, SIG30, SIG40, SIG50), переданные другими устройствами (10, 20, 30, 40, 50), и определяют расстояния (D10-20, D10-30, D10-40, D10-50, D20-10, D20-30, D20-40, D20-50, D30-10, D30-20, D30-40, D30-50, D40-10, D40-20, D40-30, D40-50, D50-10, D50-20, D50-30, D50-40), отделяющие указанное устройство (10, 20, 30, 40, 50) от каждого из других устройств (10, 20, 30, 40, 50);
передают при помощи каждого подчиненного устройства (10, 20, 30, 40) в координирующее устройство (50) расстояния (D10-20, D10-30, D10-40, D10-50, D20-10, D20-30, D20-40, D20-50, D30-10, D30-20, D30-40, D30-50, D40-10, D40-20, D40-30, D40-50), отделяющие указанное подчиненное устройство (10, 20, 30,4 0) от каждого из других устройств (10, 20, 30, 40, 50), причем передачу осуществляют при помощи средств (12, 22, 32, 42, 52) беспроводной цифровой связи;
определяют при помощи координирующего устройства (50) относительные положения подчиненных устройств (10, 20, 30, 40).
2. Способ по п. 1, в котором координирующее устройство (50) содержит средства геопозиционирования в наземной системе координат, при этом способ дополнительно содержит этап (122), на котором определяют относительные положения подчиненных устройств (10, 20, 30, 40) по отношению к наземной системе координат.
3. Способ по п. 1, содержащий предварительный этап (101), на котором определяют относительное положение подчиненного устройства (10) по отношению к координирующему устройству (50), при этом подчиненное устройство (10) позиционируют в контрольной точке (82), относительное положение которой по отношению к координирующему устройству (50) известно.
4. Способ позиционирования по п. 1, в котором на этапе определения при помощи координирующего устройства (50) относительных положений подчиненных устройств (10,20,30,40) оптимизируют функции стоимости (С1, С2), соответствующей одному из следующих выражений:

или

где:
xk, yk и zk - координаты устройства k, для которого необходимо определить положение в системе координат (O, X, Y, Z), связанной с устройством 50;
dn - расстояние, отделяющее устройство k от устройства n;
xn, yn и zn - координаты устройства n, отделенного от устройства k расстоянием dn;
wn - весовой коэффициент, связанный с измерением мощности приема сигнала, поступающего от узла с индексом n.
5. Способ по п. 1, содержащий предварительный этап, на котором определяют относительное положение подчиненного устройства (10) по отношению к координирующему устройству (50), при этом подчиненное устройство (10) остается неподвижным, а координирующее устройство (50) перемещается по зоне, в которой находится подчиненное устройство (10), и определяет положение подчиненного устройства посредством триангуляции при помощи передач UWB.
6. Способ по п. 1, в котором синхронизацию внутренних часов (15, 25, 35, 45) подчиненных устройств (10, 20, 30, 40) осуществляют при помощи периодической передачи координирующим устройством (50) сигнала синхронизации (61).
7. Способ по п. 6, в котором передачу сигнала синхронизации (61) выполняют при помощи средств (51) беспроводной связи.
8. Способ по п. 6 или 7, в котором координирующее устройство (50) содержит приемник GPS (53), при этом внутренние часы (56) главного устройства (50) соответствуют внутренним часам приемника GPS (53).
9. Способ по п. 1, в котором устройства (10, 20, 30, 40, 50) содержат средства оценки высоты, при этом способ содержит дополнительный этап, на котором определяют значения высоты подчиненных устройств (10, 20, 30, 40) по отношению к координирующему устройству (50).
10. Устройство позиционирования (10, 20, 30, 40, 50), содержащее средства (16, 26, 36, 46, 56) обработки данных и средства (17, 27, 37, 47, 57) запоминания, внутренние часы (15, 25, 35, 45, 56), оснащенные средствами их синхронизации, передатчик/приемник UWB (11, 21, 31, 41, 51) и средства (12, 22, 32, 42, 52) беспроводной цифровой связи, при этом устройство (10, 20, 30, 40, 50) выполнено с возможностью осуществления способа по п. 1.
11. Устройство позиционирования (10, 20, 30, 40, 50) по п. 10, содержащее приемник GPS (13, 23, 33, 43, 53).
| US2014152437 A1, 05.06.2014 | |||
| US2004192353 A1, 30.09.2004 | |||
| US2008234930 A1, 25.09.2008 | |||
| US2010074133 A1, 25.03.2010 | |||
| US2012002702 A1, 05.01.2012 | |||
| US8599758 B1, 03.12.2013 | |||
| АРХИТЕКТУРА И СИСТЕМА ДЛЯ ОБЕСПЕЧЕНИЯ ИНФОРМИРОВАННОСТИ О МЕСТОПОЛОЖЕНИИ | 2004 |
|
RU2358282C2 |

