УРОВЕНЬ ТЕХНИКИ
[0001] Настоящее изобретение в целом относится к одноопорным поддерживающим устройствам и, в частности, к опорно-подъемному устройству, выполненному с возможностью приведения в действие одной рукой.
[0002] Множество грузов обычно поднимают и устанавливают вручную, например, во время процессов монтажа, осмотра и ремонта. Если груз имеет вес больше, чем определенное значение, повторный подъем и установка груза может привести к перенапряжению мышц и усталости. Кроме того, необходимость ручного подъема тяжелых грузов увеличивает рабочую нагрузку на технический персонал и, таким образом, приводит к более частым перерывам, снижению концентрации внимания во время работы и потенциальному снижению качества работы. По меньшей мере некоторые известные поддерживающие устройства используются для поддерживания грузов и для предоставления техническому персоналу возможности без усилий поднимать и получать доступ к таким грузам. Например, одно известное поддерживающее устройство выполнено с возможностью приведения в действие подходящим источником энергии для оказания помощи техническому персоналу при подъеме тяжелых грузов. В частности, поддерживающее устройство содержит спусковой механизм приведения в действие, который при его высвобождении принуждает поддерживающее устройство удерживать поддерживаемую нагрузку в статическом положении. При нажатии спусковой механизм приведения в действие обеспечивает техническому персоналу возможность изменять высоту подъема груза. Однако при управлении поддерживающим устройством технический персонал обычно одной рукой должен приводить в действие спусковой механизм приведения в действие и другой рукой управлять высотой подъема поддерживающего устройства.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0003] Согласно одному аспекту обеспечено опорно-подъемное устройство. Опорно-подъемное устройство содержит линейный приводной механизм, имеющий первый конец, выполненный с возможностью поддерживания объекта, и датчик нагрузки, расположенный с возможностью определения приложения первой нагрузки к датчику нагрузки по меньшей мере указанным объектом. Линейный приводной механизм сохраняет равновесное состояние при поддерживании первой нагрузки. Опорно-подъемное устройство дополнительно содержит контроллер, соединенный с возможностью передачи данных с датчиком нагрузки и выполненный с возможностью выборочного приведения в действие линейного приводного механизма в ответ на приложение второй нагрузки к датчику нагрузки.
[0004] Согласно еще одному аспекту, обеспечен способ управления работой линейного приводного механизма. Способ включает в себя сохранение равновесного состояния линейного приводного механизма при поддерживании первой нагрузки, определение приложения второй нагрузки к линейному приводному механизму и выборочное приведение в действие линейного приводного механизма в ответ на приложение к нему второй нагрузки.
[0005] Согласно еще одному аспекту, обеспечен компьютерочитаемый носитель данных, содержащий исполняемые компьютером инструкции для использования в управлении работой линейного приводного механизма. Исполняемые компьютером инструкции, при их исполнении по меньшей мере одним процессором, обусловливают сохранение процессором равновесного состояния линейного приводного механизма при поддерживании первой нагрузки, определять приложение второй нагрузки к линейному приводному механизму и выборочно приводить в действие линейный приводной механизм в ответ на приложение к нему второй нагрузки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
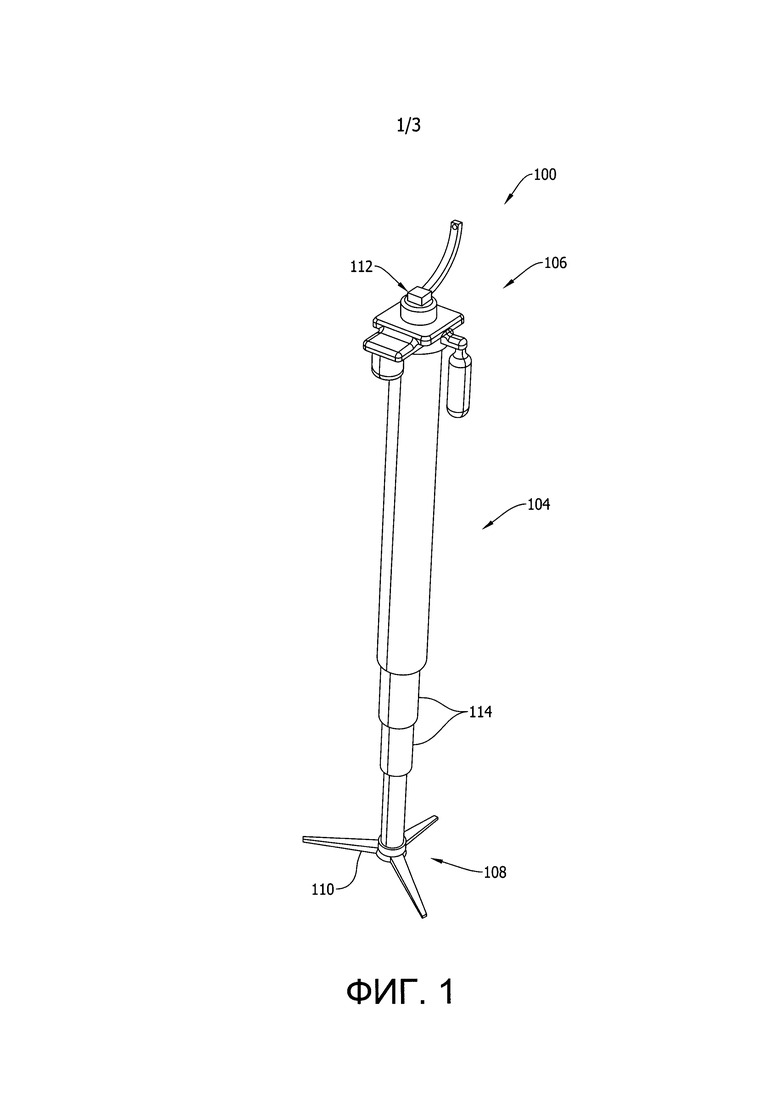
[0006] На ФИГ. 1 показан перспективный вид приведенного в качестве примера опорно-подъемного устройства;
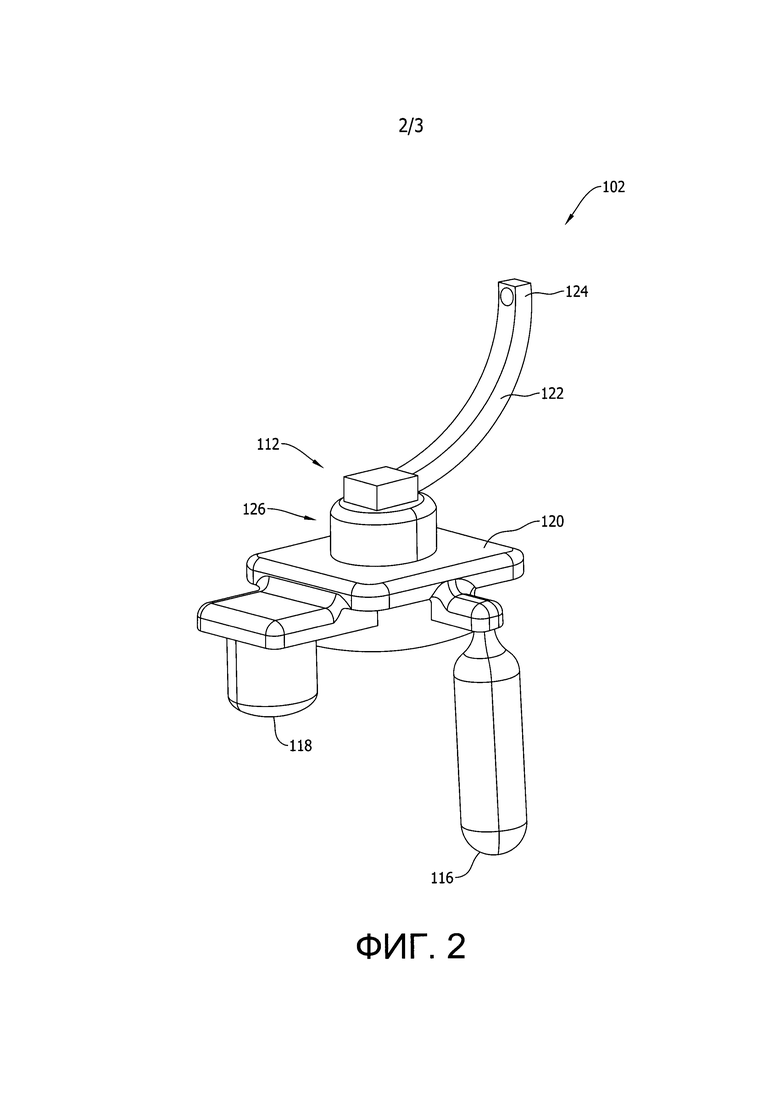
[0007] На ФИГ. 2 показан увеличенный перспективный вид приведенного в качестве примера приводного узла, который может использоваться с опорно-подъемным устройством, показанным на ФИГ. 1; и
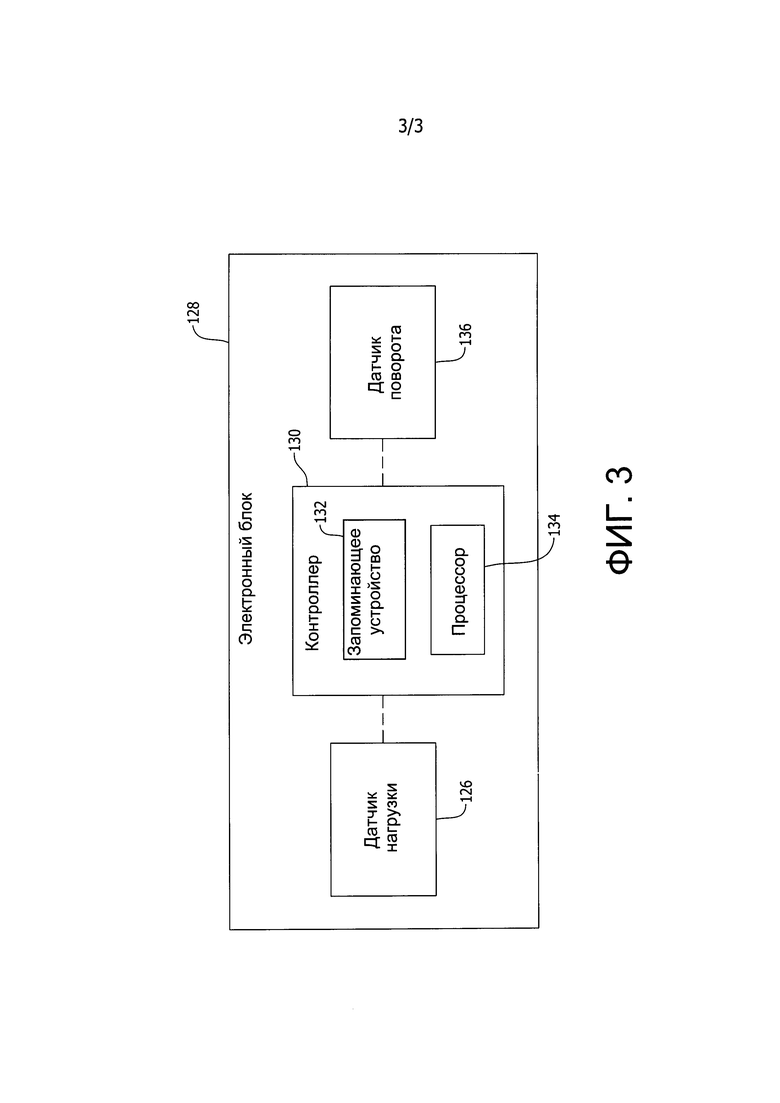
[0008] На ФИГ. 3 показана блок-схема приведенного в качестве примера электронного блока, который может использоваться с приводным узлом, показанным на ФИГ. 2.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0009] Описанные в настоящей заявке варианты реализации относятся к опорно-подъемному устройству, выполненному с возможностью приведения в действие одной рукой. В частности, описанное в настоящей заявке опорно-подъемное устройство выполнено с возможностью обнаружения внешних нагрузок, приложенных к нему, и ответного регулирования его высоты на основании указанных внешних нагрузок. Например, опорно-подъемное устройство содержит контроллер, который управляет работой линейного приводного механизма, поддерживающего объект (т.е. испытывающего воздействие первой нагрузки), такой как инструмент или другое переносное устройство. Контроллер сохраняет равновесное состояние линейного приводного механизма, когда к линейному приводному механизму приложена только первая нагрузка. В свою очередь, контроллер выборочно активирует линейный приводной механизм в ответ на приложение внешней второй нагрузки к линейному исполнительно-приводному механизму. Например, согласно одному варианту реализации вторая нагрузка обуславливается техником, тянущим вверх или толкающим вниз объект для его выборочного использования и размещения. Также, длина линейного приводного механизма изменяется только при приложении к нему внешней нагрузки, и, таким образом, обеспечивается подъемный и поддерживающий инструмент, который является эффективным и удобным в использовании.
[0010] Используемый в настоящей заявке элемент или этап, указанный в единственном числе, не должен восприниматься как исключающий множественное число, если такое исключение не указано явно. Кроме того, ссылки на "приведенный в качестве примера вариант реализации" или "один вариант реализации" настоящего изобретения не должны интерпретироваться как исключающие существование дополнительных вариантов реализации, которые также включают в себя описанные признаки.
[0011] На ФИГ. 1 показан перспективный вид приведенного в качестве примера опорно-подъемного устройства 100, а на ФИГ. 2 показан увеличенный перспективный вид приведенного в качестве примера приводного узла 102, который может использоваться с подъемным поддерживающим устройством 100. Согласно приведенному в качестве примера варианту реализации опорно-подъемное устройство 100 содержит линейный приводной механизм 104, имеющий первый конец 106 и второй конец 108. Опорно-подъемное устройство 100 также содержит основание 110. Первый конец 106 линейного приводного механизма 104 предназначен для поддерживания объекта (не показан), и второй конец 108 линейного приводного механизма 104 взаимодействует с основанием 110, так что линейный приводной механизм 104 выполнен с возможностью свободно вращаться относительно основания 110 вокруг более чем одной оси. Кроме того, согласно одному варианту реализации второй конец 108 взаимодействует с основанием 110 посредством посадки с натягом. Также, несмотря на свободное вращение, указанная посадка с натягом обеспечивает возможность выборочной и статической ориентации линейного приводного механизма 104 относительно основания 110.
[0012] Опорно-подъемное устройство 100 дополнительно содержит карданный подвес 112, расположенный на первом конце 106 линейного приводного механизма 104. Карданный подвес 112 предназначен для установки объекта на линейный приводной механизм 104. В частности, карданный подвес 112 обеспечивает возможность свободного вращения объекта относительно первого конца 106 вокруг более чем одной оси. Кроме того, карданный подвес 112 обеспечивает возможность выборочного ориентирования объекта в различных положениях для достижения улучшенной доступности объекта для пользователя. Кроме того, опорно-подъемное устройство 100 содержит множество корпусных секций 114, расположенных телескопически относительно друг друга. Множество корпусных секций 114 обеспечивают выполнение опорно-подъемного устройства 100 в форме компактной конструкции, которую можно выборочно выдвигать и отводить, как описано более подробно ниже.
[0013] Как описано выше, линейный приводной механизм 104 (показанный на ФИГ. 1) выполнен с возможностью выборочного приведения в действие в ответ на приложение внешней второй нагрузки помимо первой нагрузки, приложенной по меньшей мере объектом, к линейному приводному механизму 104. Как показано на ФИГ. 2, приводной узел 102 обеспечивает управление приведением в действие линейного приводного механизма 104. Линейный приводной механизм 104 приводится в действие любым подходящим источником энергии, который обеспечивает возможность функционирования опорно-подъемного устройства 100, как описано в настоящей заявке. Например, линейный приводной механизм 104 может быть приведен в действие пневматически, гидравлически или электродвигателем. Как показано на чертеже, приводной узел 102 содержит напорный резервуар 116 и регулятор 118 давления для пневматического приведения в действие линейного приводного механизма 104. Напорный резервуар 116 расположен на опорно-подъемном устройстве 100, что обеспечивает независимость опорно-подъемного устройства 100 от источника энергии. Согласно еще одному варианту реализации опорно-подъемное устройство 100 принимает пневматическую текучую среду от источника энергии, расположенного отдельно от опорно-подъемного устройства 100.
[0014] Приводной узел 102 также содержит опорную пластину 120 и опорный рычаг 122, проходящий из опорной пластины 120. В частности, на опорной пластине 120 размещен карданный подвес 112, и опорный рычаг 122 соединен с карданным подвесом 112. Опорный рычаг 122 дополнительно содержит свободный конец 124 для связи с объектом. Таким образом, объект опосредованно соединен с карданным подвесом 112, и, таким образом, обеспечена возможность желательного перемещения объекта, как описано выше.
[0015] В приведенном в качестве примера варианте реализации опорно-подъемное устройство 100 дополнительно содержит датчик 126 нагрузки, расположенный с возможностью определения приложения первой нагрузки к датчику 126 нагрузки по меньшей мере указанным объектом. Например, первая нагрузка определяется массой объекта и любых крепежных приспособлений или других средств, размещенных для создания статической нагрузки на датчик 126 нагрузки. Как показано на чертеже, объект установлен последовательно с датчиком 126 нагрузки посредством опорного рычага 122, так что первая нагрузка, приложенная к датчику 126 нагрузки и определенная датчиком 126 нагрузки включает в себя массу объекта и опорного рычага 122. Таким образом, как описано более подробно ниже, датчик 126 нагрузки упрощает приведение в действие линейного приводного механизма 104, когда к датчику 126 нагрузки прикладывают вторую нагрузку, действующую на объект или опорный рычаг 122. Согласно еще одному варианту реализации датчик 126 нагрузки расположен во втором конце 108 (показанном на ФИГ. 1) линейного приводного механизма 104. Расположение датчика 126 нагрузки во втором конце 108 обеспечивает возможность определения датчиком 126 нагрузки приложения нагрузок в различных местах помимо объекта и опорного рычага 122. Также, расположение датчика 126 нагрузки во втором конце 108 обеспечивает приведение в действие линейного приводного механизма 104, когда вторая нагрузка приложена к датчику 126 нагрузки на объекте, опорном рычаге 122 или вдоль множества корпусных секций 114 (показанных на ФИГ. 1) линейного приводного механизма 104.
[0016] Датчиком 126 нагрузки является любое чувствительное устройство, которое обеспечивает возможность функционирования опорно-подъемного устройства 100, как описано в настоящей заявке. Приведенный в качестве примера датчик 126 нагрузки содержит помимо прочего тензодатчик.
[0017] На ФИГ. 3 схематически показан приведенный в качестве примера электронный блок 128, который может использоваться с приводным узлом 102 (показанным на ФИГ. 2). В приведенном в качестве примера варианте реализации электронный блок 128 содержит датчик 126 нагрузки и контроллер 130, соединенный с возможностью передачи данных с датчиком 126 нагрузки. Контроллер 130 содержит запоминающее устройство 132 и процессор 134, содержащий аппаратные средства и программное обеспечение, соединенные с запоминающим устройством 132, для исполнения запрограммированных инструкций. Процессор 134 может содержать один или более процессорных модулей (например, в многоядерной конфигурации) и/или криптоускоритель (не показан). Контроллер 130 выполнен с возможностью быть запрограммированным для исполнения одной или более операций, описанных в настоящей заявке, путем программирования запоминающего устройства 132 и/или процессора 134. Например, процессор 134 может быть запрограммирован кодированием операции в форме исполняемых инструкций и сохранением указанных исполняемых инструкций в запоминающем устройстве 132.
[0018] Процессор 134 может включать в себя, помимо прочего, центральный процессор общего назначения (CPU), микроконтроллер, микропроцессор, процессор компьютера с сокращенным набором машинных команд (RISC), открытую платформу для мультимедийных приложений (ОМАР), прикладную специализированную интегральную схему (ASIC), программируемую логическую схему (PLC) и/или любую другую схему или процессор, выполненные с возможностью исполнения функций, описанных в настоящей заявке. Описанные в настоящей заявке способы могут быть закодированы в форме исполняемых инструкций, заключенных в компьютерочитаемом носителе, включая без ограничения накопительное устройство и/или запоминающее устройство. Такие инструкции при их исполнении процессором 134 вызывают выполнение процессором 134 по меньшей мере части функций, описанных в настоящей заявке. Вышеуказанные варианты приведены в только качестве примера и, таким образом, не предназначены для ограничения любым способом определения и/или значения термина "процессор".
[0019] Запоминающим устройством 132 является одно или более устройств, которые обеспечивают информацию, такую как исполняемые инструкции и/или другие данные, которые необходимо хранить и извлекать. Запоминающее устройство 132 может содержать один или более читаемых компьютером носителей, таких как, помимо прочего, динамическое запоминающее устройство с произвольным доступом (DRAM), синхронное динамическое запоминающее устройство с произвольным доступом (SDRAM), статическое запоминающее устройство с произвольным доступом (SRAM), твердотельный накопитель и/или жесткий диск. Запоминающее устройство 132 может быть выполнено с возможностью хранения, помимо прочего, исполняемых инструкций, операционных систем, приложений, источников информации, инсталляционных сценариев и/или данных любого другого типа, подходящих для использования в способах и системах, описанных в настоящей заявке.
[0020] Инструкции для операционных систем и приложений расположены в функциональной форме в некратковременном запоминающем устройстве 132 для выполнения процессором 134 для реализации одного или более описанных в настоящей заявке способов. Эти инструкции согласно различным вариантам реализации могут быть сохранены на различных физических или материальных компьютерочитаемых носителях, таких как запоминающее устройство 132 или другое запоминающее устройство, такое как компьютерочитаемые носители (не показаны), которые могут включать в себя без ограничения флэш-диск и/или флэш-накопитель. Кроме того, инструкции могут быть расположены в функциональной форме в некратковременных компьютерочитаемых носителях, которые могут включать в себя без ограничения карту памяти (СМ), флэш-карту (CF), карту памяти в формате Secure Digital (SD), флэш-накопитель (MS), мультимедийную карту памяти (ММС), встроенную мультимедийную карту памяти (е-ММС) и микронакопительное запоминающее устройство.
Компьютерочитаемые носители могут быть выполнены с возможностью выборочной установки в контроллер 130 и/или извлечения из контроллера 130 для обеспечения возможности доступа и/или исполнения процессором 134. Согласно еще одному варианту реализации, компьютерочитаемые носители не являются съемными.
[0021] При использовании контроллер 130 соединен с возможностью передачи данных с источником приведения в действие для линейного приводного механизма 104 (например, регулятором 118 давления (показанным на ФИГ. 2)) для управления приведением в действие линейного приводного механизма 104. Как описано выше, контроллер 130 также соединен с возможностью передачи данных с датчиком 126 нагрузки и выборочно приводит в действие линейный приводной механизм 104 в ответ на приложение второй нагрузки (т.е. временной массы) к датчику 126 нагрузки. В частности, первая нагрузка, приложенная к датчику 126 нагрузки, является статической нагрузкой (т.е. целевой массой), и контроллер 130 сохраняет равновесное состояние линейного приводного механизма 104, когда осуществляется поддержка только первой нагрузки. Если к датчику 126 нагрузки приложить вторую нагрузку, контроллер 130 принимает сигнал от датчика 126 нагрузки, который содержит значение второй нагрузки относительно значения первой нагрузки. Например, согласно одному варианту реализации датчик 126 нагрузки калиброван таким образом, что значение второй нагрузки передается только контроллеру 130. В частности, значение первой нагрузки вычитается из значения полной нагрузки (т.е. суммарного значения первой и второй нагрузок), приложенной к датчику 126 нагрузки, перед тем, как отчет о нагрузке будет передан в контроллер 130.
[0022] Контроллер 130 также выборочно приводит в действие линейный приводной механизм 104 только в том случае, когда разность между значением первой нагрузки и значением второй нагрузки больше, чем заданное пороговое значение. В частности, если датчик 126 нагрузки откалиброван, как описано выше, контроллер 130 выборочно приводит в действие линейный приводной механизм 104 только в том случае, когда значение второй нагрузки больше, чем заданное пороговое значение. Заданное пороговое значение выбрано на основании необходимой чувствительности приведения в действие линейного приводного механизма 104. Например, заданное пороговое значение выбирают таким образом, что контроллер 130 приводит в действие линейный приводной механизм 104 только в том случае, когда вторую нагрузку преднамеренно прикладывают к датчику 126 нагрузки, и, таким образом, уменьшается вероятность случайного приведения в действие линейного приводного механизма 104.
[0023] Кроме того, контроллер 130 выборочно приводит в действие линейный приводной механизм 104 на основании того, является ли вторая нагрузка положительной нагрузкой или отрицательной нагрузкой. Положительная нагрузка в целом следует из направленной вниз внешней силы, приложенной к датчику 126 нагрузки, и отрицательная нагрузка в целом следует из направленной вверх внешней силы, приложенной к датчику 126 нагрузки. Также, положительная нагрузка увеличивает значение полной нагрузки, приложенной к датчику 126 нагрузки, (т.е. целевая масса + временная масса = положительное изменение массы), и отрицательная нагрузка уменьшает значение полной нагрузки, приложенной к датчику 126 нагрузки (т.е. целевая масса + временная масса = отрицательное изменение массы). Затем контроллер 130 определяет, как привести в действие линейный приводной механизм 104 на основании того, обнаружено ли положительное или отрицательное изменение массы датчиком 126 нагрузки. В частности, контроллер 130 вызывает выдвижение линейного приводного механизма 104, когда вторая нагрузка является отрицательной нагрузкой, и вызывать отведение линейного приводного механизма 104, когда вторая нагрузка является положительной нагрузкой. Кроме того, контроллер 130 пропорционально изменяет скорость выдвижения и отведения приводного механизма 104 в зависимости от значения второй нагрузки. Например, контроллер 130 выдвигает и отводит линейный приводной механизм 104 с более высокой скоростью, если значение второй нагрузки увеличивается. Таким образом, линейный приводной механизм 104 приспосабливается в ответ на воспринятую срочность на основании значения второй нагрузки.
[0024] Согласно приведенному в качестве примера варианту реализации электронный блок 128 также содержит датчик 136 наклона для определения ориентации и наклона линейного приводного механизма 104 относительно вектора силы тяжести. Датчик 136 наклона может быть любым датчиком, который обеспечивает функционирование опорно-подъемного устройства 100, как описано в настоящей заявке. Приведенные в качестве примера датчики наклона включают в себя помимо прочего акселерометр и гироскопический датчик. Согласно еще одному варианту реализации датчиком 126 нагрузки является многоосевой тензодатчик.
[0025] Когда опорно-подъемное устройство 100 не находится в строго вертикальном состоянии, значение первой нагрузки будет меньше, чем ее значение при калибровке датчика 126 нагрузки. Также, датчик 136 наклона непрерывно или периодически выполняет замеры и обнаруживает ориентацию линейного приводного механизма 104 относительно вектора силы тяжести, и обменивается данными с контроллером 130 для задания компенсации обнаруженных изменений в нагрузке. Кроме того, контролер 130 ограничивает приведение в действие линейного приводного механизма 104, когда наклон линейного приводного механизма 104 больше, чем максимальный угол наклона. Максимальный угол наклона выбирается на основании угла линейного приводного механизма 104 относительно вектора силы тяжести, что приводит к нулевой нагрузке от первой нагрузки, приложенной к датчику 126 нагрузки. Приложение нулевой нагрузки под углом больше, чем максимальный угол наклона, приводит к тому, что контроллер 130 входит в режим остановки при ошибке, так что линейный приводной механизм 104 не может быть выборочно выдвинут или отведен. Режим остановки при ошибке отменяется, когда угол линейного приводного механизма 104 возвращается к значению, которое меньше, чем максимальный угол наклона.
[0026] Контроллер 130 также сохраняет равновесное состояние линейного приводного механизма 104, когда величина прикладываемой второй нагрузки больше, чем заданное пороговое значение. В частности, приложение второй нагрузки величиной больше, чем заданное пороговое значение, воспринимается как резкий и случайный удар по опорно-подъемному устройству 100 (например, удар падающего объекта). Таким образом, контроллер 130 выполнен с возможностью отличения случайного удара от преднамеренного движения, вызывающего приведение в действие, для уменьшения вероятности неумышленного приведения в действие опорно-подъемного устройства 100.
[0027] Также обеспечен способ управления работой линейного приводного механизма 104. Способ включает в себя сохранение равновесного состояния линейного приводного механизм 104 при поддерживании первой нагрузки, определение приложения второй нагрузки к линейному приводному механизму 104 (т.е. датчику 126 нагрузки, соединенному с линейным приводным механизм 104), выборочное приведение в действие линейного приводного механизма 104 в ответ на приложение к нему второй нагрузки.
[0028] Согласно одному варианту реализации выборочное приведение в действие линейного приводного механизма 104 включает в себя приведение в действие линейного приводного механизма 104, только когда разность между значением первой нагрузки и значением второй нагрузки больше, чем заданное пороговое значение.
[0029] Способ также включает в себя определение наклона линейного приводного механизма 104 относительно вектора силы тяжести и регулирование значения первой нагрузки на основании наклона линейного приводного механизма 104. Кроме того, способ включает в себя ограничение приведения в действие линейного приводного механизма 104, когда наклон линейного приводного механизма 104 больше, чем максимальный угол наклона.
[0030] Согласно некоторым вариантам реализации выборочное приведение в действие линейного приводного механизма включает в себя выдвижение линейного приводного механизма 104, когда вторая нагрузка, приложенная к линейному приводному механизму 104, является отрицательной нагрузкой, и отведение линейного приводного механизма 104, когда вторая нагрузка, приложенная к линейному приводному механизму 104, является положительной нагрузкой. Кроме того, способ включает в себя пропорциональное изменение скорости выдвижения и отведения линейного приводного механизма 104 в зависимости от значения второй нагрузки. Кроме того, выборочное приведение в действие линейного приводного механизма 104 включает в себя сохранение равновесного состояния линейного приводного механизма 104, когда вторая нагрузка приложена со скоростью больше, чем заданное пороговое значение.
Иллюстративные и неисключительные примеры предмета настоящего раскрытия согласно настоящему изобретению описаны в пунктах А1-С20, приведенных ниже:
А1. Согласно одному аспекту настоящего изобретения обеспечено опорно-подъемное устройство 100, содержащее:
линейный приводной механизм 104, имеющий первый конец 106, выполненный с возможностью поддерживания объекта;
датчик 126 нагрузки, расположенный с возможностью определения приложения к нему первой нагрузки по меньшей мере указанным объектом, причем указанный линейный исполнительно-приводной механизм 104 сохраняет равновесное состояние во время поддерживания первой нагрузки; и
контроллер 130, соединенный с возможностью передачи данных с датчиком 126 нагрузки и выполненный с возможностью выборочного приведения в действие линейного приводного механизма 104 в ответ на приложение второй нагрузки к датчику 126 нагрузки.
А2. Предпочтительно устройство 100 по п. А1, в котором контроллер 130 дополнительно выполнен с возможностью приведения в действие линейного приводного механизма 104, только когда разность между значением первой нагрузки и значением второй нагрузки больше, чем заданное пороговое значение.
A3. Предпочтительно устройство 100 по п. А1 или А2, дополнительно содержащее акселерометр и/или гироскопический датчик, выполненные с возможностью определения наклона линейного приводного механизма 104 относительно вектора силы тяжести, причем контроллер 130 выполнен с возможностью регулирования значения первой нагрузки на основании наклона линейного приводного механизма 104.
А4. Предпочтительно устройство 100 по любому из пп. А1-А3, в котором контроллер 130 дополнительно выполнен с возможностью:
вызывать выдвижение линейного приводного механизма 104, когда вторая нагрузка, приложенная к датчику 126 нагрузки, является отрицательной нагрузкой; и
вызывать отведение линейного приводного механизма 104, когда вторая нагрузка, приложенная к датчику 126 нагрузки, является положительной нагрузкой.
А5. Предпочтительно устройство 100 по любому из пп. А1-А4, в котором линейный приводной механизм 104 дополнительно содержит множество корпусных секций 114, расположенных телескопически относительно друг друга.
А6. Устройство 100 по любому из пп. А1-А5, дополнительно содержащее карданный подвес 112, расположенный на первом конце 106 линейного приводного механизма 104 и имеющий конфигурацию, обеспечивающую установку объекта на линейный приводной механизм 104.
А7. Устройство 100 по любому из пп. А1-А6, дополнительно содержащее основание 110, причем линейный приводной механизм 104 дополнительно содержит второй конец 108, выполненный с возможностью взаимодействия с основанием 110 с обеспечением возможности свободного поворота линейного приводного механизма 104 относительно указанного основания 110 вокруг более чем одной оси.
B8. Согласно дополнительному аспекту настоящего изобретения обеспечен способ управления работой линейного приводного механизма 104, включающий:
сохранение равновесного состояния линейного приводного механизма 104 при поддерживании первой нагрузки;
определение приложения второй нагрузки к линейному приводному механизму 104 и
выборочное приведение в действие линейного приводного механизма 104 в ответ на приложение второй нагрузки к линейному приводному механизму 104.
B9. Предпочтительно способ по п. В8, согласно которому выборочное приведение в действие линейного приводного механизма 104 включает в себя приведение в действие линейного приводного механизма 104, только когда разность между значением первой нагрузки и значением второй нагрузки больше, чем заданное пороговое значение.
В10. Способ по п. В8 или В9, дополнительно включающий в себя:
определение наклона линейного приводного механизма 104 относительно вектора силы тяжести и
регулировку значения первой нагрузки на основании наклона линейного приводного механизма 104.
В11. Предпочтительно способ по п. 10, дополнительно включающий ограничение приведения в действие линейного приводного механизма 104, когда наклон линейного приводного механизма 104 больше, чем максимальный угол наклона.
B12. Способ по любому из пп. В8-В11, согласно которому выборочное приведение в действие линейного приводного механизма 104 включает:
вызов выдвижения линейного приводного механизма 104, когда вторая нагрузка, приложенная к линейному приводному механизму 104, является отрицательной нагрузкой; и
вызов отведения линейного приводного механизма 104, когда вторая нагрузка, приложенная к линейному приводному механизму 104, является положительной нагрузкой.
B13. Предпочтительно способ по п. В12, дополнительно включающий пропорциональное изменение скорости выдвижения и отведения линейного приводного механизма 104 в зависимости от значения второй нагрузки.
B14. Предпочтительно способ по любому из пп. В8-В13, согласно которому выборочное приведение в действие линейного приводного механизма 104 включает в себя сохранение равновесного состояния линейного приводного механизма 104, когда величина прикладываемой второй нагрузки больше, чем заданное пороговое значение.
С15. Согласно еще одному дополнительному аспекту настоящего изобретения обеспечен компьютерочитаемый носитель данных, имеющий содержащиеся в нем исполняемые компьютером инструкции, для использования в управлении работой линейного приводного механизма 104, причем исполняемые компьютером инструкции, при их исполнении по меньшей мере одним процессором, принуждают процессор:
удерживать линейный приводной механизм 104 в равновесии при поддерживании первой нагрузки;
определять приложение второй нагрузки к линейному приводному механизму 104 и
выборочно приводить в действие линейный приводной механизм 104 в ответ на приложение второй нагрузки к линейному приводному механизму 104.
С16. Предпочтителен компьютерочитаемый носитель данных по п. С15, в котором исполняемые компьютером инструкции дополнительно принуждают процессор приводить в действие линейный приводной механизм 104, только когда разность между значением первой нагрузки и значением второй нагрузки больше, чем заданное пороговое значение.
С17. Компьютерочитаемый носитель данных по п. С15 или С16, в котором исполняемые компьютером инструкции дополнительно принуждают процессор:
определять наклон линейного приводного механизма 104 относительно вектора силы тяжести и
регулировать значение первой нагрузки на основании наклона линейного приводного механизма 104.
С18. Предпочтителен компьютерочитаемый носитель данных по п. С17, в котором исполняемые компьютером инструкции дополнительно принуждают процессор ограничивать приведение в действие линейного приводного механизма 104, когда наклон линейного приводного механизма 104 больше, чем максимальный угол наклона.
С19. Компьютерочитаемый носитель данных по любому из пп. С15-С18, в которых исполняемые компьютером инструкции дополнительно вынуждают процессор:
вызывать выдвижение линейного приводного механизма 104, когда вторая нагрузка, приложенная к линейному приводному механизму 104, является отрицательной нагрузкой; и
вызывать отведение линейного приводного механизма 104, когда вторая нагрузка, приложенная к линейному приводному механизму 104, является положительной нагрузкой.
С20. Компьютерочитаемый носитель данных по любому из пп. С15-С19, в которых исполняемые компьютером инструкции дополнительно обусловливают сохранение процессором равновесного состояния приводного механизма 104, когда величина прикладываемой второй нагрузки больше, чем заданное пороговое значение.
В данном письменном описании используются примеры для раскрытия различных вариантов реализации, включая предпочтительный режим, и также для предоставления любому специалисту возможности практического осуществления различных вариантов реализации, включая выполнение и использование любых устройств или систем и реализацию любых включенных способов. Патентоспособный объем охраны настоящего изобретения определен пунктами приложенной формулы и может включать в себя другие примеры, которые появятся у специалистов. Такие другие примеры предназначены для включения в объем притязаний формулы, если они имеют конструктивные элементы, которые не отличаются от буквального языка пунктов приложенной формулы, или если они включают в себя эквивалентные конструктивные элементы, несущественно отличающиеся от буквального языка пунктов приложенной формулы.
Предложено опорно-подъемное устройство. Опорно-подъемное устройство содержит линейный приводной механизм, датчик нагрузки, контроллер. Линейный приводной механизм сохраняет равновесное состояние во время поддерживания первой нагрузки. Контроллер выполнен с возможностью выборочного приведения в действие линейного приводного механизма в ответ на приложение второй нагрузки к датчику нагрузки. Предложены также способ управления работой линейного приводного механизма, компьютерочитаемый носитель данных. Достигается возможность приведения в действие опорно-подъемного устройства одной рукой. 3 н. и 17 з.п. ф-лы, 3 ил.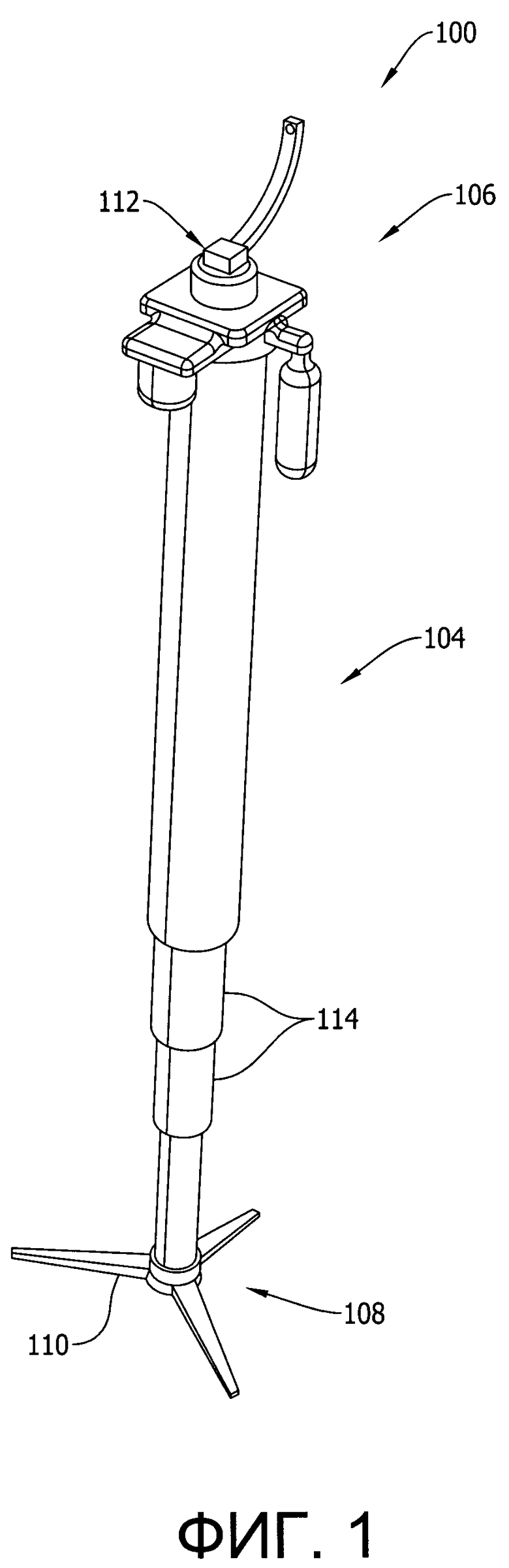
1. Опорно-подъемное устройство (100), содержащее:
линейный приводной механизм (104), имеющий первый конец (106), выполненный с возможностью поддерживания объекта;
датчик (126) нагрузки, расположенный с возможностью определения приложения к нему первой нагрузки по меньшей мере указанным объектом, причем указанный линейный приводной механизм (104) сохраняет равновесное состояние во время поддерживания первой нагрузки; и
контроллер (130), соединенный с возможностью передачи данных с датчиком (126) нагрузки и выполненный с возможностью выборочного приведения в действие линейного приводного механизма (104) в ответ на приложение второй нагрузки к датчику (126) нагрузки.
2. Устройство (100) по п. 1, в котором контроллер (130) дополнительно выполнен с возможностью приведения в действие линейного приводного механизма (104), только когда разность между значением первой нагрузки и значением второй нагрузки больше, чем заданное пороговое значение.
3. Устройство (100) по п. 1 или 2, дополнительно содержащее акселерометр и/или гироскопический датчик, выполненные с возможностью определения наклона линейного приводного механизма (104) относительно вектора силы тяжести, причем контроллер (130) выполнен с возможностью регулирования значения первой нагрузки на основании наклона линейного приводного механизма (104).
4. Устройство (100) по п. 1 или 2, в котором контроллер (130) дополнительно выполнен с возможностью:
вызывать выдвижение линейного приводного механизма (104), когда вторая нагрузка, приложенная к датчику (126) нагрузки, является отрицательной нагрузкой; и
вызывать отведение линейного приводного механизма (104), когда вторая нагрузка, приложенная к датчику (126) нагрузки, является положительной нагрузкой.
5. Устройство (100) по п. 1 или 2, в котором линейный приводной механизм (104) дополнительно содержит множество корпусных секций (114), расположенных телескопически относительно друг друга.
6. Устройство (100) по п. 1 или 2, дополнительно содержащее карданный подвес (112), расположенный на первом конце (106) линейного приводного механизма (104) и имеющий конфигурацию, обеспечивающую установку объекта на линейный приводной механизм (104).
7. Устройство (100) по п. 1 или 2, дополнительно содержащее основание (110), причем линейный приводной механизм (104) дополнительно содержит второй конец (108), выполненный с возможностью взаимодействия с основанием (110) с обеспечением возможности свободного поворота линейного приводного механизма (104) относительно основания (110) вокруг более чем одной оси.
8. Способ управления работой линейного приводного механизма (104), включающий:
сохранение равновесного состояния линейного приводного механизма (104) при поддерживании первой нагрузки;
определение приложения второй нагрузки к линейному приводному механизму (104) и
выборочное приведение в действие линейного приводного механизма (104) в ответ на приложение к нему второй нагрузки.
9. Способ по п. 8, согласно которому выборочное приведение в действие линейного приводного механизма (104) включает в себя приведение в действие линейного приводного механизма (104), только когда разность между значением первой нагрузки и значением второй нагрузки больше, чем заданное пороговое значение.
10. Способ по п. 8 или 9, дополнительно включающий:
определение наклона линейного приводного механизма (104) относительно вектора силы тяжести и
регулировку значения первой нагрузки на основании наклона линейного приводного механизма (104).
11. Способ по п. 10, дополнительно включающий ограничение приведения в действие линейного приводного механизма (104), когда наклон линейного приводного механизма (104) больше, чем максимальный угол наклона.
12. Способ по п. 8 или 9, согласно которому выборочное приведение в действие линейного приводного механизма (104) включает:
вызов выдвижения линейного приводного механизма (104), когда вторая нагрузка, приложенная к линейному приводному механизму (104), является отрицательной нагрузкой; и
вызов отведения линейного приводного механизма (104), когда вторая нагрузка, приложенная к линейному приводному механизму (104), является положительной нагрузкой.
13. Способ по п. 12, дополнительно включающий пропорциональное изменение скорости выдвижения и отведения линейного приводного механизма (104) в зависимости от значения второй нагрузки.
14. Способ по п. 8 или 9, согласно которому выборочное приведение в действие линейного приводного механизма (104) включает сохранение равновесного состояния линейного приводного механизма (104), когда величина прикладываемой второй нагрузки больше, чем заданное пороговое значение.
15. Компьютерочитаемый носитель данных, имеющий содержащиеся в нем исполняемые компьютером инструкции, для использования в управлении работой линейного приводного механизма (104), причем исполняемые компьютером инструкции, при их исполнении по меньшей мере одним процессором, принуждают процессор:
удерживать линейный приводной механизм (104) в равновесии при поддерживании первой нагрузки;
определять приложение второй нагрузки к линейному приводному механизму (104) и
выборочно приводить в действие линейный приводной механизм (104) в ответ на приложение к нему второй нагрузки.
16. Компьютерочитаемый носитель данных по п. 15, в котором исполняемые компьютером инструкции дополнительно принуждают процессор приводить в действие линейный приводной механизм (104), только когда разность между значением первой нагрузки и значением второй нагрузки больше, чем заданное пороговое значение.
17. Компьютерочитаемый носитель данных по п. 15 или 16, в котором исполняемые компьютером инструкции дополнительно принуждают процессор:
определять наклон линейного приводного механизма (104) относительно вектора силы тяжести и
регулировать значение первой нагрузки на основании наклона линейного приводного механизма (104).
18. Компьютерочитаемый носитель данных по п. 17, в котором исполняемые компьютером инструкции дополнительно вынуждают процессор ограничивать приведение в действие линейного приводного механизма (104), когда наклон линейного приводного механизма (104) больше, чем максимальный угол наклона.
19. Компьютерочитаемый носитель данных по п. 15 или 16, в котором исполняемые компьютером инструкции дополнительно вынуждают процессор:
вызывать выдвижение линейного приводного механизма (104), когда вторая нагрузка, приложенная к линейному приводному механизму (104), является отрицательной нагрузкой; и
вызывать отведение линейного приводного механизма (104), когда вторая нагрузка, приложенная к линейному приводному механизму (104), является положительной нагрузкой.
20. Компьютерочитаемый носитель данных по пп. 15, 16, в котором исполняемые компьютером инструкции дополнительно обусловливают сохранение процессором равновесного состояния линейного приводного механизма (104), когда величина прикладываемой второй нагрузки больше, чем заданное пороговое значение.
| US 2011101806 A1, 05.05.2011 | |||
| US 5987726 A, 23.11.1999 | |||
| US 2015258679 A1, 17.09.2015. |

