ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области гидравлических домкратов, в частности домкратов с неподвижным поршнем, при этом управляемое домкратом устройство соединено с цилиндром, который является подвижным и выполнен с возможностью поступательного движения; оно относится к выполнению каналов питания домкратов гидравлической текучей средой. В частности, изобретение касается применения таких домкратов для управления шагом лопастей винта в авиационном тяговом двигателе, таком как двигатель с не капотированными винтами.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Для улучшения характеристик и удельного расхода топлива тяговых двигателей летательных аппаратов была предложена новая архитектура с дублетом винтов противоположного вращения, расположенных либо на входе, либо на выходе газотурбинного двигателя. Такие двигатели называют также английским выражением “open rotor”. Например, двигатель, описанный в патентной заявке FR 2941493 содержит газогенератор классического газотурбинного двигателя, в котором одна или несколько ступеней турбины приводят во вращение не капотированный вентилятор, расположенный снаружи двигателя. В случае газотурбинного двигателя с задним дублетом винтов роторы могут быть также установлены на выходном конструктивном элементе картера и приводятся во вращение свободной турбиной через коробку приводов, например, с эпициклоидной зубчатой передачей.
Как и в случае классических турбовинтовых двигателей, лопасти винтов двигателей “open rotor” являются лопастями с регулируемым углом установки, то есть во время полета можно изменять шаг этих винтов для изменения тяги двигателя и для оптимизации КПД винта в зависимости от скорости летательного аппарата. Можно предусмотреть самые разные устройства для изменения угла установки лопастей, которое, как правило, включает в себя поворот лопасти вокруг ее главной оси при помощи конических шестерен, находящихся под ножкой лопасти. Эти шестерни взаимодействуют с коническими шестернями системы управления.
Во врем фаз полета угол установки винта меняется между двумя пределами, соответствующими положению малого шага на низкой скорости движения, например, порядка 30° по отношению к плоскости вращения винтов, и положению большого шага на высокой скорости, например, порядка 65° по отношению к этой же плоскости вращения винтов. Лопасти могут занимать положение флюгирования, которое соответствует установочному углу, превышающему угол установки большого шага и равному около 90°. В этом положении лобовое сопротивление лопастей является минимальным. Лопасти можно также повернуть в положение реверса тяги с отрицательным установочным углом, например, -30°.
Управлять шагом лопастей можно при помощи привода, подвижный орган которого приводится в поступательное движение в осевом направлении и приводит во вращение поворотные цапфы лопастей вокруг их соответствующей радиальной оси через соответствующую систему рычагов, установленную на подшипнике качения.
Каждый из двух роторов дублета винтов имеет свое собственное устройство привода и управления шагом. В случае устройства переднего ротора часть ограничительных условий связана с ограничением центрального пространства по причине необходимости предусматривать проход для вспомогательных систем ротора, находящегося сзади.
Задачей изобретения является разработка устройства приведения во вращение лопастей вокруг их оси, которое одновременно является компактным и надежным.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Для решения задачи предложен гидравлический домкрат, содержащий опору, подвижный цилиндр, выполненный с возможностью поступательного перемещения относительно опоры, поршень, неподвижно соединенный с опорой внутри цилиндра и ограничивающий вместе с цилиндром две камеры, и устройство питания камер гидравлической текучей средой на входе из опоры. Этот домкрат отличается тем, что устройство питания содержит телескопические трубопроводы, при этом каждый телескопический трубопровод содержит два трубчатых элемента, перемещающихся скольжением один в другом, при этом первый трубчатый элемент неподвижно соединен с опорой одним концом, и второй трубчатый элемент неподвижно соединен с цилиндром по меньшей мере в двух точках, отстоящих друг от друга вдоль образующей цилиндра, при этом одна из упомянутых камер получает питание через первый телескопический трубопровод на одной части хода цилиндра и через второй телескопический трубопровод на остальной части хода цилиндра.
Преимуществом заявленного домкрата является его компактность в радиальном направлении, поскольку трубопроводы питания гидравлической текучей средой расположены вдоль наружной поверхности подвижного цилиндра. Кроме того, он является надежным, и направление между подвижными деталями хорошо контролируется, в частности, направление между трубчатыми элементами. Благодаря этому, его работа не ухудшается при размерных изменениях, появляющихся в результате явлений теплового расширения, или когда он подвергается деформациям в результате механических напряжений во время различных фаз полета.
Изобретение представляет особый интерес, когда домкрат является кольцевым и когда необходимо освободить пространство во внутреннем объеме, чтобы оставить проход для вспомогательных систем, которые предназначены для устройств, находящихся на выходе относительно опоры домкрата.
Согласно другому отличительному признаку, первый трубопровод содержит первое средство закрывания, выполненное с возможностью перекрывания трубопровода в конце упомянутого хода, второй трубопровод содержит второе средство закрывания, выполненное с возможностью удержания трубопровода закрытым на упомянутой части хода цилиндра и открытым на упомянутой остальной части хода цилиндра.
Предпочтительно средство закрывания первого или второго трубопровода реализуют за счет взаимодействия первого трубчатого элемента и второго трубчатого элемента упомянутого трубопровода, при этом второй трубчатый элемент имеет проход, устанавливающий сообщение между первым трубчатым элементом и упомянутой камерой, и первый трубчатый элемент имеет отверстия, открываемые упомянутым проходом.
Согласно варианту выполнения, первый трубчатый элемент закрыт на своем конце и содержит упомянутые отверстия сбоку, второй трубчатый элемент имеет участок с таким диаметром, который позволяет перекрывать упомянутые боковые отверстия, и участок с более широким диаметром для образования упомянутого прохода. В частности, второй трубопровод соединен с упомянутой камерой через трубчатый элемент, расположенный параллельно второму трубопроводу.
Согласно еще одному отличительному признаку, первые трубчатые элементы трубопроводов соединены с опорой участком S-образной формы.
Заявленный домкрат находит свое предпочтительное применение в механизме управления шагом винта с регулируемым углом установки. Домкрат неподвижно соединен через свою опору со статором винта.
Первый трубопровод питает упомянутую камеру в диапазоне регулировки шага, а второй трубопровод - в диапазоне реверса тяги винта.
Согласно другому отличительному признаку, другая камера получает питание через третий телескопический трубопровод.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Другие отличительные признаки и преимущества будут более очевидны из нижеследующего описания не ограничительного варианта осуществления изобретения со ссылками на прилагаемые чертежи, на которых:
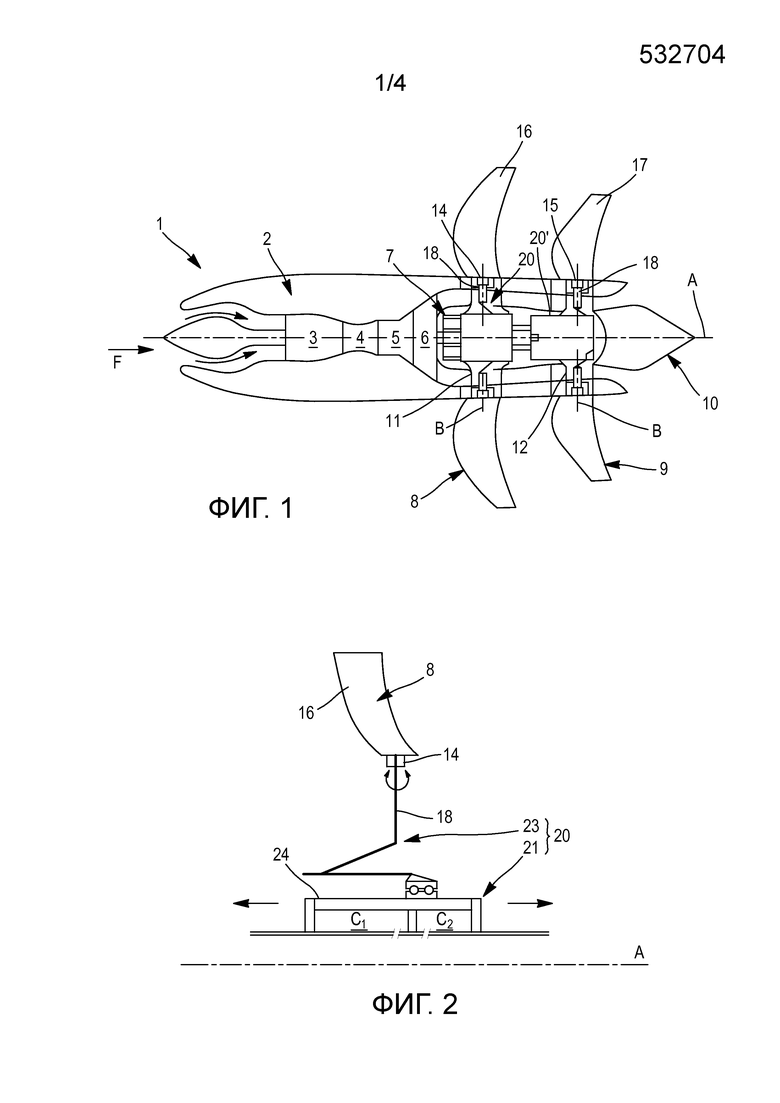
Фиг. 1 изображает схематичный вид в осевом разрезе двигателя с винтами противоположного вращения, для которого применяют изобретение.
Фиг. 2 - схему управления шагом лопастей винта двигателя, показанного на фиг. 1.
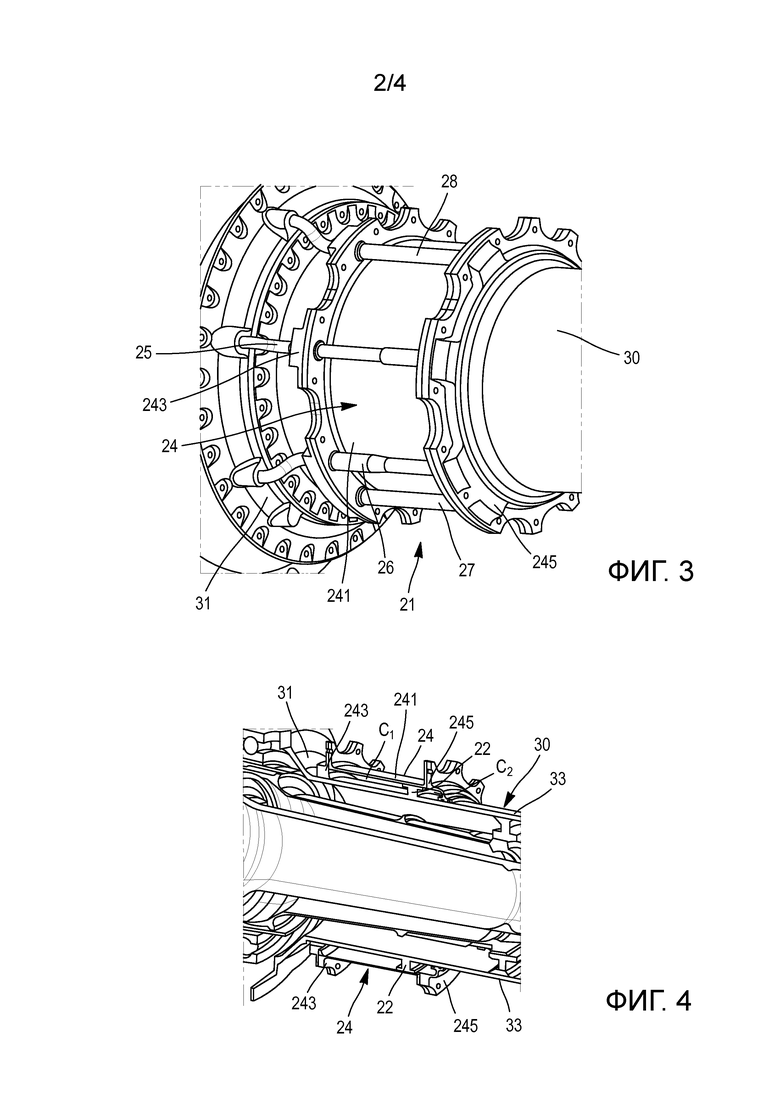
Фиг. 3 - вид в изометрии заявленного гидравлического домкрата.
Фиг. 4 - вид в осевом разрезе домкрата, показанного на фиг.3.
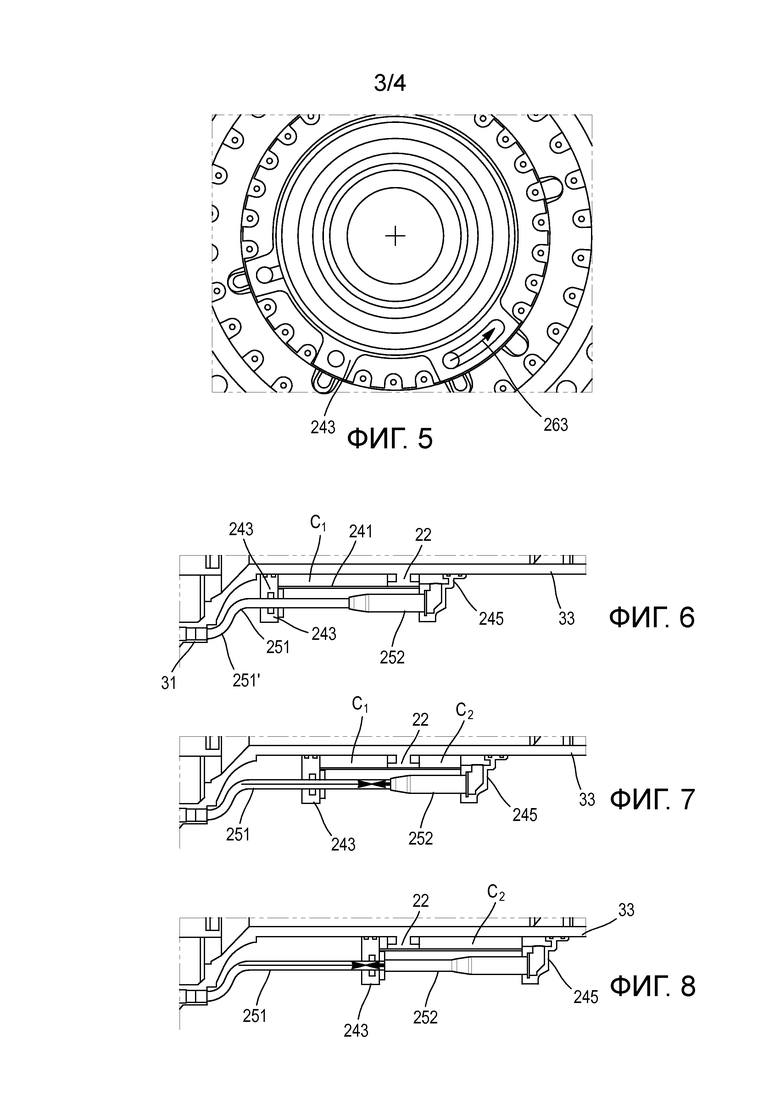
Фиг. 5 - вид в поперечном разрезе домкрата, показанного на фиг. 3, на уровне входной крышки.
Фиг. 6-8 - частичный вид в продольном разрезе домкрата, показанного на фиг. 3, на уровне первого трубопровода малого шага в различных фазах полета.
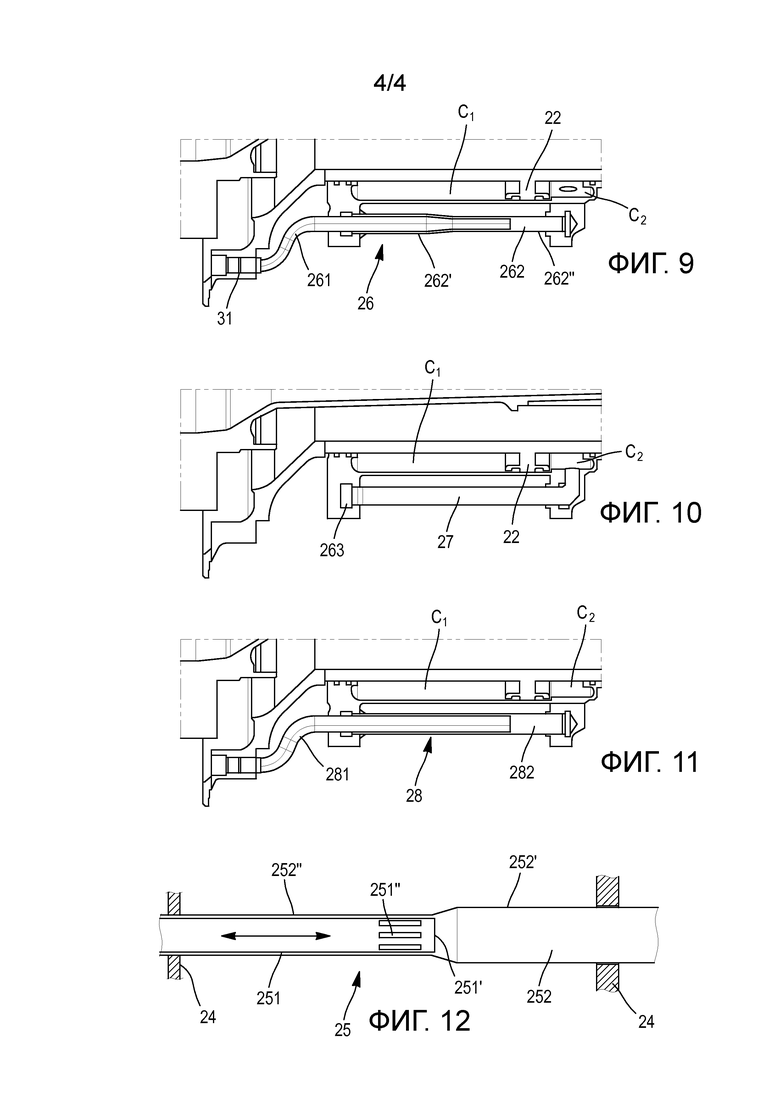
Фиг. 9 - вид в продольном разрезе домкрата, показанного на фиг. 3, на уровне первого трубопровода обратного шага.
Фиг. 10 - частичный вид в продольном разрезе домкрата, показанного на фиг. 3, на уровне перепускного трубопровода.
Фиг. 11 - частичный вид в продольном разрезе домкрата, показанного на фиг. 3, на уровне трубопровода большого шага.
Фиг. 12 - схематичный вид средства закрывания первого трубопровода.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТА ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Как показано схематично на фиг. 1, газотурбинный двигатель 1 с не капотированным вентилятором (“open rotor”) с продольной осью А классически содержит от входа к выходу в направлении прохождения газового потока F внутри гондолы 2 газотурбинного двигателя один или два компрессора 3 в зависимости от архитектуры простого или двухконтурного газогенератора, кольцевую камеру 4 сгорания, турбину высокого давления или две турбины 5 высокого давления с промежуточным давления в зависимости от упомянутой архитектуры и турбину 6 низкого давления, которая вращает через редуктор или коробку 7 приводов с эпициклоидными передачами и с противоположным направлением вращения два винта, входной 8 и выходной 9 по направлению потока F. Винты находятся на одной линии вдоль продольной оси А газотурбинного двигателя и образуют вентилятор. Сопло 10 выпуска газов классически образует задний корпус двигателя.
Винты расположены в параллельных радиальных плоскостях, перпендикулярных к оси А, и приводятся во вращение при помощи турбины 6 и коробки 7 приводов в противоположных направлениях вращения. Они установлены во вращающихся картерах 11,12, например, с многоугольным кольцом, описанным в патентной заявке FR 12 56 323, поданной 2 июля 2012 года заявителем, вокруг которого установлены ножки 14,15 лопастей 16,17.
Лопасти входного 8 и выходного 9 винтов являются лопастями с регулируемым углом установки. Их ориентируют вокруг радиальной поворотной оси В при помощи соответствующего механизма 20 и 20’ таким образом, чтобы они занимали оптимальное угловое положение, определяемое в зависимости от условий работы газотурбинного двигателя и от фаз полета летательного аппарата.
Нижеследующее описание касается системы 20 ориентации лопастей, связанной с входным винтом 8.
Система 20 ориентации, схематично показанная на фиг.2, обеспечивает различные вышеупомянутые функциональные фазы входного винта 8: поворот лопастей в двух направлениях с увеличивающимся, уменьшающимся или обратным шагом, а также возвращение лопастей в положение флюгирования в случае нарушения в работе.
Для этого она содержит кольцевой гидравлический домкрат 21 с осью А и с линейным перемещением, корпус 24 которого, выполненный с возможностью поступательного движения, образован цилиндром, при этом поршень домкрата остается неподвижным. Поступательное движение домкрата передается трансмиссионным механизмом 23, соединяющим корпус 24 домкрата с радиальными валами 18 ножек 14 лопастей 16 винта 8. Этот механизм содержит подшипник качения, внутреннее кольцо которого неподвижно соединено с корпусом 24, и набор рычагов, соединяющих наружное кольцо с радиальными валами, которые приводятся таким образом во вращение вокруг их соответствующей оси в результате поступательного движения корпуса домкрата.
На фиг. 3 представлен вид в перспективе снаружи домкрата 21 с его цилиндром 24. На фиг. 4 представлен вид в осевом разрезе изнутри домкрата, показанного на фиг. 3. Цилиндр 24 является подвижным и установлен с возможностью поступательного движения на трубчатой опоре 30, которая образует неподвижную опору домкрата. На фиг. 4 внутри неподвижной опоры 30 показана часть вала привода выходного ротора, а также кожух, в котором проходят вспомогательные системы для выходного ротора. Неподвижная опора 30 содержит на входе домкрата 21 обечайку 31, через которую распределяются рабочие текучие среды домкрата. Опору называют неподвижной, так как она неподвижно соединена со статорной частью газотурбинного двигателя.
Таким образом, домкрат 21 содержит цилиндр, который в этом варианте выполнения образован цилиндрической частью 241, входной крышкой 243 и выходной крышкой 245. Цилиндр 24 перемещается скольжением на трубчатой части 33 неподвижной опоры 30. С этой трубчатой частью 33 неподвижно соединена перегородка 22, которая вместе с цилиндром 24 образует две камеры: С1 и С2. Камера С1 является входной камерой со стороны обечайки 31 опоры.
На фиг. 3 видны три первых трубчатых элемента, неподвижно соединенные своим входным концом с обечайкой 31, а также четыре трубчатых элемента, которые неподвижно соединены с цилиндром и через которые получают питание камеры С1 и С2 соответственно.
Как показано на фиг. 6-8, первый трубопровод, называемый трубопроводом 25 малого шага, образован первым трубчатым элементом 251 малого шага и вторым трубчатым элементом 252 малого шага. Первый трубчатый элемент малого шага неподвижно соединен с обечайкой 31, через которую он получает питание гидравлической текучей средой, и перемещается скольжением внутри второго трубчатого элемента 252 малого шага, который неподвижно соединен с цилиндром 24 и сообщается с камерой С2 на выходе.
Показанный на фиг. 9 второй трубопровод, называемый трубопроводом 26 обратного шага, образован первым трубчатым элементом 261 обратного шага и вторым трубчатым элементом 262 обратного шага. Первый трубчатый элемент 261 обратного шага неподвижно соединен с обечайкой 31, через которую он получает питание гидравлической текучей средой, и перемещается скольжением внутри второго трубчатого элемента 262 обратного шага, который неподвижно соединен с цилиндром 24 и сообщается с камерой С2 на выходе. Он сообщается с камерой С2 через так называемый перепускной трубопровод 27; их работа будет описана ниже. Второй трубчатый элемент 262 обратного шага сообщается с трубопроводом 27 на уровне входной крышки 243 через канал 263, как показано на фиг. 5 в поперечном разрезе домкрата, показанного на фиг. 3.
Третий трубопровод, называемый трубопроводом 28 большого шага, образован первым трубчатым элементом 281 большого шага и вторым трубчатым элементом 282 большого шага. Первый трубчатый элемент 281 большого шага неподвижно соединен с обечайкой 31, через которую он получает питание гидравлической текучей средой, и перемещается скольжением внутри второго трубчатого элемента 282 большого шага, который неподвижно соединен с цилиндром 24 и сообщается с камерой С1 на входе.
Все три первых трубчатых элемента 251, 261 и 281 закреплены при помощи любого соответствующего средства в их соответствующем гнезде, выполненном в обечайке 31. Они сообщаются с источником текучей среды под давлением через органы управления, описание которых в настоящей заявке не представлено.
Три вторых трубчатых элемента 252, 262 и 282, а также перепускной трубопровод 27 неподвижно соединены с цилиндром 24 и, согласно отличительному признаку изобретения, соответственно закреплены на цилиндре 24 в двух отстоящих друг от друга точках на его образующей. В частности, две точки находятся на их концах в данном случае на уровне входных и выходных крышек 243 и 245 соответственно. Можно предусмотреть другие варианты реализации вторых трубчатых элементов; например, вторые трубчатые элементы можно по меньшей мере частично выполнить путем механической обработки в массе одного из составных элементов цилиндра.
Преимуществом предложенного решения является возможность обеспечения для каждого трубопровода эффективного направления первого трубчатого элемента, когда он перемещается скольжением внутри второго трубчатого элемента. Когда летательный аппарат совершает полет, неподвижная опора 30, а также все детали конструкции двигателя подвергаются действию напряжений, которые могут изменить осевую ориентацию одной детали по отношению к другой; например, трубчатая часть 33 опоры 30 может прогнуться относительно обечайки 31. Без этого направления относительные деформации между деталями могут заблокировать движение цилиндра относительно неподвижной опоры.
Необходимо отметить, что первые трубчатые элементы соединены с обечайкой через участок трубы S-образной формы с двойным изгибом. Это связано с разностью диаметра между цилиндром 24 и выходами распределения текучей среды, выполненными на обечайке 31. Преимуществом такого расположения является обеспечение локального поглощения разности расширения и других деформаций между первыми трубчатыми элементами 251, 261 и 281 и другими деталями.
Далее следует описание работы этого узла и способа питания двух камер в различных фазах полета летательного аппарата, на котором установлен газотурбинный двигатель, чтобы гарантировать надежную работу механизма управления шагом лопастей.
Увеличение объема выходной камеры С2 приводит к перемещению цилиндра 24 вправо относительно неподвижной перегородки 22, показанной на фигурах. Это перемещение соответствует на части хода цилиндра уменьшению шага лопастей, который при нормальной работе изменяется от большого шага к малому шагу, затем регулировке малого шага на земле, например, между значениями 65, 30 и 0°, затем на остальной части хода цилиндра - переходу в положение реверса, например, -30°, когда тягу, производимую винтов, меняют на обратную для обеспечения дополнительного торможения на земле при посадке.
Согласно другому признаку изобретения, описанное ниже решение позволяет избежать непроизвольного и случайного перехода от положительного установочного угла лопастей к положению реверса тяги.
На фиг. 6 слева показано положение упора домкрата, соответствующее крайнему положению флюгирования на 90°. Речь идет об установочном угле безопасности, предназначенном для уменьшения лобового сопротивления винта в случае отказа системы управления шагом. Когда домкрат 24 перемещается из этого положения вправо, установочный угол уменьшается и становится отрицательным, проходя через угол 0°, который является плоскостью вращения винта. В частности, на этой фигуре речь идет о продольном разрезе вдоль первого трубопровода 25 малого шага. Необходимо отметить, что первый трубчатый элемент 251 малого шага перемещается скольжением во втором трубчатом элементе 252 малого шага. На фиг. 7 показано, что домкрат переместился вправо, в данном случае речь идет о положении установочного угла на 0° и о рабочем упоре. Между фиг.6 и фиг. 7 гидравлическая текучая среда перешла из первого трубчатого элемента 251 в камеру С2. Радиальное отверстие, выполненное в выходной крышке 245, обеспечивает переход текучей среды из второго трубчатого элемента 252 в камеру С2. При этом предусмотрено средство закрывания первого трубопровода малого шага, чтобы в этой рабочей фазе это крайнее положение положительного шага не могло перейти в сторону отрицательных шагов. Действительно, необходимо избегать непредвиденного включения реверса тяги, см. фиг. 6-8.
Предпочтительно это средство закрывания трубопровода малого шага просто реализуют следующим образом, как показано на фиг. 12.
Первый трубчатый элемент 251 закрыт на своем конце 251’, противоположном обечайке 31. Он имеет вблизи нее боковые щели 251”, как показано на фиг. 12. Кроме того, второй трубчатый элемент 252 имеет две части разного диаметра, при этом первая часть 252’ имеет диаметр, превышающий диаметр первого трубчатого элемента 251. Таким образом, щели открыты, и текучая среда может переходить из первого трубчатого элемента 251 во второй трубчатый элемент 252 и, в частности, в расширенную часть 252’ этого элемента. Таким образом, в диапазоне шагов от 90° до 0° выходная камера С2 получает питание через первый трубопровод 25 малого шага. Когда шаг приходит к значению 0°, трубопровод 25 закрывается по причине перекрывания щелей 251” частью 252” меньшего диаметра второго трубчатого элемента 252. Независимо от давления, действующего в первом трубчатом элементе, оно не передается в выходную камеру С2, объем которой больше не меняется.
Прохождение этого положения соответствует переходу непосредственно к режиму обратного шага. Это происходит только при совместном действии второго трубопровода 262 обратного шага и перепускного трубопровода 27.
Трубопровод 26 обратного шага имеет такую же конструкцию, что и первая, но перевернутую от входа к выходу. Второй трубчатый элемент 262 имеет часть 262’ большого диаметра и участок 262” меньшего диаметра. Тогда как первый трубчатый элемент имеет закрытый конец и содержит при этом боковые щели, средство закрывания аналогично средству закрывания первого трубопровода, но выполнено в обратном порядке. Во время фазы регулировки шага трубопровод закрыт, пока участок 262” малого диаметра второго трубчатого элемента 262 перекрывает боковые щели первого трубчатого элемента 261. Два средства закрывания трубопроводов 25 и 26 работают согласованно таким образом, чтобы при перемещении, например, к шагу 0° закрывание одного соответствовало открыванию другого. Таким образом, когда шаг находится в положении упора на 0°, необходимо положительное действие, чтобы обеспечивать переход в обратное положение, и наоборот. Это положительное действие является результатом подачи команды обратного шага через второй трубопровод 26.
Когда привод переходит в обратное положение, гидравлическая текучая среда проходит через трубопровод 26 обратного шага, затем через перепускной трубопровод питает выходную камеру С2. Благодаря заявленному устройству, переход в обратное положение предполагает, что домкрат сначала приходит в положение на 0°, затем получает питание при специальном давлении обратного шага через второй трубопровод 26 обратного шага. Текучая среда проходит из трубопровода 26 через трубчатый элемент 261, затем через боковые щели элемента 261 в участок 262’ большего диаметра трубчатого элемента 26 и в трубопровод 27 через перепускной канал 263, см. фиг.5. На фиг. 8 видно, что домкрат переместился вправо, хотя трубопровод 25 закрыт. Питание камеры стало возможным через трубопровод 26 обратного шага, см. фиг. 8, в комбинации с перепускным трубопроводом 27, см. фиг. 9 и 10.
На фиг. 11 показан третий трубопровод, называемый трубопроводом 28 большого шага. Первый трубчатый элемент 281 трубопровода 28 перемещается скольжением внутри трубчатого элемента 282 для питания входной камеры С1. Речь идет о переходе шага от реверса тяги к флюгированию. В случае необходимости, текучую среду, поступающую из входного устройства управления, направляют внутрь элемента 281, затем между ним и вторым трубчатым элементом 282, который имеет больший диаметр.
Таким образом, изобретение позволяет реализовать систему управления шагом винта, которая является компактной, имея небольшой радиальный габарит, но вместе с тем оставляет достаточное центральное пространство для прохождения другого трубопровода. Эта система является надежной, так как ее конструкция является мало чувствительной к размерным изменениям и к осевых прогибам. Наконец, она обеспечивает надежную работу.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ДОМКРАТ | 2015 |
|
RU2620570C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДОМКРАТ | 2009 |
|
RU2412106C1 |
| ТУРБОВИНТОВОЙ ДВИГАТЕЛЬ, ИМЕЮЩИЙ ВОЗДУШНЫЙ ВИНТ, СОСТОЯЩИЙ ИЗ ЛОПАСТЕЙ С ИЗМЕНЯЕМЫМ ШАГОМ | 2008 |
|
RU2452658C2 |
| ПОДШИПНИК СО СРЕДСТВОМ СМАЗКИ И СИСТЕМА ДЛЯ ИЗМЕНЕНИЯ ШАГА ЛОПАСТЕЙ ВОЗДУШНОГО ВИНТА ТУРБОВИНТОВОГО ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, ОБОРУДОВАННОГО УКАЗАННЫМ ПОДШИПНИКОМ | 2013 |
|
RU2630823C2 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2013 |
|
RU2648502C2 |
| Гидравлический домкрат | 1986 |
|
SU1342874A1 |
| ВЕНТИЛЯТОРНЫЙ МОДУЛЬ С ЛОПАСТЯМИ С ПЕРЕМЕННЫМ УГЛОМ УСТАНОВКИ | 2019 |
|
RU2794134C2 |
| Редуктор с эпициклоидной передачей с трубопроводами для текучей среды и турбовинтовой двигатель с таким редуктором для летательного аппарата | 2014 |
|
RU2653671C2 |
| ГИДРАВЛИЧЕСКИЙ ДОМКРАТ | 2003 |
|
RU2254289C2 |
| УСТРОЙСТВО ПОДАЧИ ТЕКУЧЕЙ СРЕДЫ В ГИДРАВЛИЧЕСКИЙ СИЛОВОЙ ЦИЛИНДР ДЛЯ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ЛОПАСТЕЙ ВЕНТИЛЯТОРА ТУРБОВИНТОВОГО ДВИГАТЕЛЯ С ДВОЙНЫМ ВОЗДУШНЫМ ВИНТОМ | 2012 |
|
RU2589815C2 |
Изобретение касается гидравлического домкрата, содержащего неподвижную опору (30), подвижный цилиндр (24), выполненный с возможностью поступательного перемещения относительно опоры, неподвижный поршень внутри цилиндра, ограничивающий вместе с цилиндром две камеры, и устройство питания камер гидравлической текучей средой на входе из неподвижной опоры (30,31). Домкрат отличается тем, что устройство питания содержит телескопические трубопроводы (25,26,28), при этом каждый телескопический трубопровод содержит два трубчатых элемента, перемещающиеся скольжением один в другом, при этом первый трубчатый элемент неподвижно соединен с неподвижной опорой (31) одним концом, и второй трубчатый элемент неподвижно соединен с цилиндром по меньшей мере в двух точках, отстоящих друг от друга вдоль образующей цилиндра. Гидравлический домкрат входит в состав механизма управления шагом винта и неподвижно соединен с его статорной частью. Изобретения обеспечивают повышение компактности и надежности. 2 н. и 7 з.п. ф-лы, 12 ил.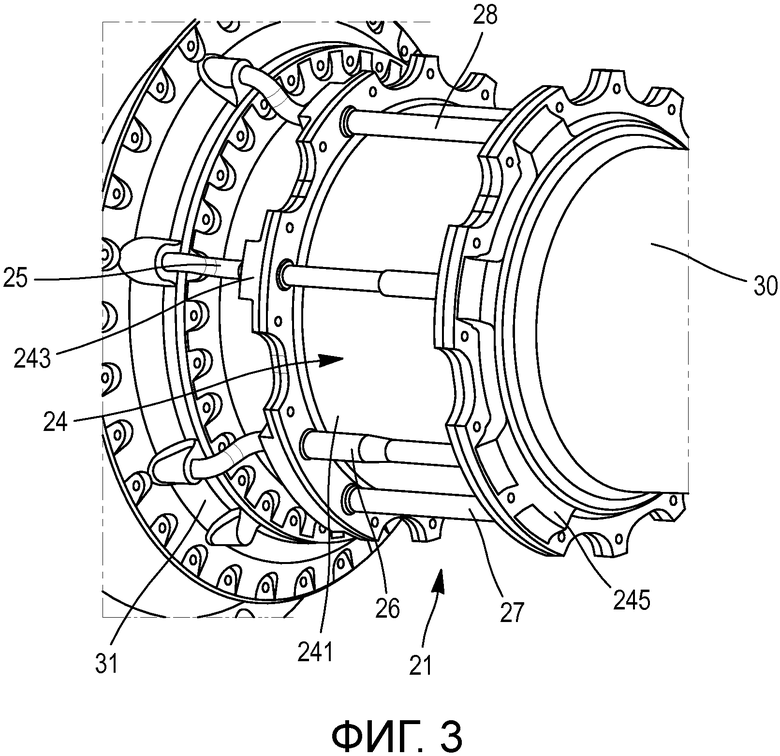
1. Гидравлический домкрат, содержащий опору (30), подвижный цилиндр (24), выполненный с возможностью поступательного перемещения относительно опоры, поршень (22), неподвижно соединенный с опорой внутри цилиндра и ограничивающий вместе с цилиндром (24) две камеры (С1, С2), и устройство питания камер гидравлической текучей средой на входе из опоры (30,31), отличающийся тем, что устройство питания содержит телескопические трубопроводы (25, 26, 28), при этом каждый телескопический трубопровод содержит два трубчатых элемента (251,261,281; 252,262,282), перемещающиеся скольжением один в другом, при этом первый трубчатый элемент неподвижно соединен с опорой одним концом, и второй трубчатый элемент неподвижно соединен с цилиндром по меньшей мере в двух точках, отстоящих друг от друга вдоль образующей цилиндра, при этом одна из упомянутых камер (С1, С2) получает питание через первый телескопический трубопровод (25) на одной части хода цилиндра и через второй телескопический трубопровод (26, 27) на остальной части хода цилиндра (24).
2. Гидравлический домкрат по п. 1, в котором первый трубопровод (25) содержит первое средство закрывания, выполненное с возможностью перекрывания трубопровода в конце упомянутого хода, второй трубопровод (26) содержит второе средство закрывания, выполненное с возможностью удержания трубопровода закрытым на упомянутой части хода цилиндра и открытым на упомянутой остальной части хода цилиндра.
3. Гидравлический домкрат по п. 2, в котором средство закрывания первого (25) или второго (26) трубопровода реализовано за счет взаимодействия первого трубчатого элемента (251, 261) и второго трубчатого элемента (252, 262) упомянутого трубопровода, при этом второй трубчатый элемент имеет проход, устанавливающий сообщение между первым трубчатым элементом и упомянутой камерой, и первый трубчатый элемент имеет отверстия, открываемые упомянутым проходом.
4. Гидравлический домкрат по п. 3, в котором первый трубчатый элемент (251, 261) закрыт на своем конце и содержит упомянутые отверстия сбоку, второй трубчатый элемент имеет участок (252”, 262”) с таким диаметром, который позволяет перекрывать упомянутые боковые отверстия, и участок (252’, 262’) с более широким диаметром для образования упомянутого прохода.
5. Гидравлический домкрат по одному из пп. 1-4, в котором второй трубопровод (26) соединен с упомянутой камерой через трубопровод (27), расположенный параллельно второму трубопроводу.
6. Гидравлический домкрат по одному из пп. 1-4, в котором первые трубчатые элементы трубопроводов соединены с опорой (30) участком S-образной формы.
7. Механизм управления шагом винта с регулируемым углом установки, содержащий домкрат по п. 1, при этом домкрат неподвижно соединен со статорной частью винта.
8. Механизм по п. 7, в котором первый трубопровод (25) малого шага питает упомянутую камеру (С2) в диапазоне регулировки шага, а второй трубопровод (216, 27) обратного шага - в диапазоне реверса тяги винта.
9. Механизм по одному из п. 7 или 8, в котором другая камера (С1) получает питание через третий телескопический трубопровод (28) большого шага с первым трубчатым элементом (281), неподвижно соединенным с неподвижной опорой, и вторым трубчатым элементом (282), сообщающимся с упомянутой другой камерой (С1).
| Механизм фиксации поворотной крышки герметизированной камеры | 1984 |
|
SU1289638A1 |
| WO 2012131271 A1, 04.10.2012 | |||
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ВОЗДУШНЫМ ВИНТОМ ИЗМЕНЯЕМОГО ШАГА С ОБРАТНОЙ СВЯЗЬЮ | 1996 |
|
RU2108268C1 |
| Двигатель внутреннего горения | 1928 |
|
SU17912A1 |
| 0 |
|
SU163082A1 | |

