Изобретение относится к области измерительной техники, в частности к измерению расстояния.
Известен способ формирования линейно-модулированного сигнала частотно-модулированного (ЧМ) измерителя расстояния [1, 2, 3], для реализации которого используются синтезаторы частоты с фазовой автоматической подстройкой частоты. Недостатком указанного способа формирования сигнала является относительно высокая стоимость устройств для его осуществления, инерционность и отсутствие учета дисперсионных свойств пространства распространения зондирующих волн.
Известен способ измерения расстояния и устройство для его осуществления [4], в котором реализован способ формирования линейно-модулированного сигнала. В указанном способе и устройстве осуществлено преобразование генерируемого зондирующего сверхвысокочастотного (СВЧ) сигнала на пониженную промежуточную частоту с последующим делением частоты, измерением величины отклонения частоты от заданного значения на дискретных точках модуляционной характеристики и коррекции модулирующего напряжения до уменьшения разности заданного и текущего значения частот до заданного контрольного уровня.
Этот способ формирования зондирующего сигнала реализован в измерителе расстояния, содержащем: управляемый генератор передаваемого сигнала, выход которого соединен с первым входом направленного ответвителя (НО), выход которого соединен с антенной, второй вход направленного ответвителя соединен с антенной, а выход соединен с первым входом смесителя, второй вход которого соединен с генератором опорного сигнала, а выход соединен с последовательно соединенными фильтром и усилителем промежуточной частоты. Выход усилителя соединен со входами двух каналов: измерительным каналом и каналом коррекции. Измерительный канал содержит последовательно соединенные смеситель промежуточных частот, фильтр низких частот (ФНЧ), аналого-цифровой преобразователь (АЦП), выход которого соединен с первым входом микрокомпьютера (МК). Канал коррекции содержит последовательно соединенные делитель частоты и счетчик частоты, выход которого соединен со вторым входом МК. Первый выход МК соединен с последовательно соединенными цифроаналоговым преобразователем (ЦАП) и частотным модулятором, выход которого соединен с управляющим входом генератора передаваемого сигнала.
Указанные способ измерения расстояния, включающий способ формирования сигнала ЧМ измерителя расстояния, и измеритель расстояния имеют три недостатка.
Во-первых, влияние нестабильности частоты и фазы генератора опорного сигнала на погрешность формирования модулирующего напряжения из-за того, что это формирование производится в статическом режиме работы генератора, а измерение производится в динамическом режиме.
Во-вторых, как указано в описании патента, способ и устройство нормально функционируют, если уровень сигнала в измерительном канале много меньше уровня сигнала в опорном канале. Такие условия могут быть выполнены только при больших расстояниях от антенны до зондируемого материала. На малых расстояниях сильный отраженный сигнал проходит в канал коррекции и искажает его работу, что приводит к погрешности коррекции и даже полной неработоспособности способа и прибора.
В-третьих, при формировании зондирующего сигнала не учитываются дисперсионные свойства пространства распространения зондирующих волн. В этом случае использование измерителя расстояния совместно с направляющей системой (например, перфорированной трубой) приводит к погрешности измерения при обработке сигнала как во временной, так и в спектральной области. Из-за значительного и несимметричного расширения основного лепестка спектра невозможно точно определить его центральную частоту и соответственно невозможно точно определить расстояние.
Рассмотренные факторы влияют на точность формирования модулирующей функции, следовательно, приводят к возникновению дополнительной погрешности измерения расстояния.
Наиболее близким по совокупности существенных признаков является способ формирования зондирующего модулированного сигнала ЧМ измерителя расстояния с периодической частотной модуляцией [5], который заключается в формировании периодического напряжения на управляющем входе управляемого источника энергии зондирующих волн (УИЭЗВ) с длительностью полупериода модуляции, пропорциональной расстоянию до зондируемой поверхности. При этом средняя разностная частота поддерживается постоянной путем формирования сигнала коррекции при отклонении средней разностной частоты от заданного значения, усреднения его на нескольких периодах модуляции и управления периодом модулирующего напряжения на управляющем входе УИЭЗС, полученным усредненным корректирующим сигналом. Корректирующий сигнал получают в цепи обратной связи, которая содержит частотный дискриминатор и интегратор, усредняющий сигнал с выхода частотного дискриминатора.
Этот способ формирования зондирующего модулированного сигнала ЧМ измерителя расстояния также имеет недостаток, который заключается в том, что инерционной петлей обратной связи поддерживается постоянной средняя, а не мгновенная разностная частота сигнала. Инерционная петля обратной связи не может полностью исключить погрешность регулируемого параметра (нелинейность изменения частоты зондирующего сигнала) из-за нелинейности модуляционной характеристики УИЭЗВ, особенно на участках вблизи разрыва производной регулируемого параметра. В результате мгновенная разностная частота или периоды сигнала разностной частоты (СРЧ) получаются не постоянными, что приводит к погрешности измерения расстояния при обработке СРЧ как во временной, так и в спектральной областях.
Цель изобретения - снижение неравномерности периодов СРЧ на периоде модуляции и, как следствие, устранение дополнительной погрешности измерения расстояния.
Указанная цель достигается тем, что в способе формирования зондирующего адаптивного частотно-модулированного сигнала для дальномера с периодической частотной модуляцией, включающем формирование периодических модулированных волн и возбуждение зондирующих волн, прием спустя время распространения отраженных эхо-волн, смешивание их с частью энергии зондирующих волн, выделение СРЧ и коррекцию закона модуляции модулированных волн, дополнительно измеряют мгновенные периоды СРЧ, вычисляют среднее значение периодов разностной частоты за интервал обработки сигнала, являющийся частью периода модуляции, и изменяют корректирующее напряжение до уменьшения разности среднего и текущего значения периодов до контрольного уровня.
Для измерения расстояния и для получения корректирующего напряжения используют один и тот же сигнал разностной частоты.
При наличии мешающих отражателей дополнительное снижение погрешности формирования зондирующего сигнала достигается использованием дополнительного опорного канала с линией задержки в виде отрезка фидерной линии. В таком случае часть мощности зондирующих волн через измерительный канал излучают в направлении на зондируемую поверхность, а частью мощности зондирующих волн возбуждают опорный канал, выполненный в виде отрезка фидерной линии, и используют отраженные от зондируемой поверхности эхо-волны для измерения расстояния до нее, а отраженные от конца фидерной линии эхо-волны используют для получения корректирующего напряжения на управляющем входе управляемого источника энергии зондирующих волн.
При этом для формирования периодического напряжения модуляции Uмод(t) генерируют цифровые отсчеты Uмод(tj)в фиксированные моменты времени tj и преобразуют их в дискретные аналоговые отсчеты с помощью низкочастотной фильтрации. Формирование цифровых отсчетов модулирующего напряжения производят с помощью одной из двух возможных процедур.
Первая заключается в том, что Uмод,k(tj) на k-м периоде модуляции производят рекурсивно по напряжению Uмод,k-1(tj) на предыдущем (k-1)-м периоде и корректирующему напряжению ΔUk(tj), полученному с учетом неравномерности мгновенных периодов СРЧ:

где  - корректирующее напряжение;
- корректирующее напряжение;
 - постоянный коэффициент, равный средней крутизне нарастания модулирующего напряжения;
- постоянный коэффициент, равный средней крутизне нарастания модулирующего напряжения;
UM - амплитуда модулирующего напряжения;
ТM - период модуляции;
 - относительное изменение периода СРЧ;
- относительное изменение периода СРЧ;
 - отклонение периода сигнала разностной частоты от среднего значения;
- отклонение периода сигнала разностной частоты от среднего значения;
 - средний период сигнала разностной частоты;
- средний период сигнала разностной частоты;
N - количество пересечений нулевого уровня СРЧ за интервал обработки, причем значения η(t) в промежуточных точках tj между моментами пересечения СРЧ нулевого уровня ti рассчитывают с помощью формул интерполяции.
Вторая процедура заключается в том, что формирование цифровых отсчетов модулирующего напряжения в точках пересечения нулевого уровня СРЧ в k-м периоде модуляции Uмод,k(ti) производят путем перестановки на временной оси аналогичных отсчетов (k-1)-го периода по формулам:

а в промежуточных точках периода модуляции с помощью интерполяции.
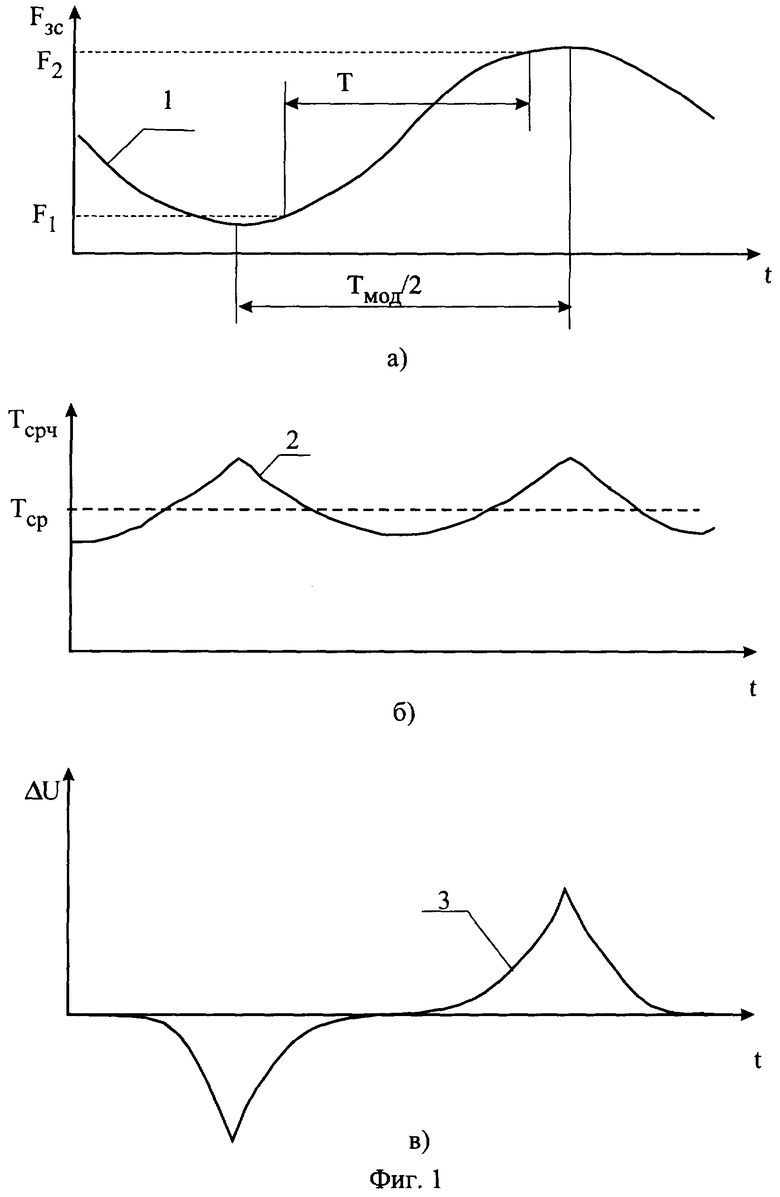
Границы интервала обработки сигнала во времени и длительность этого интервала Т, являющегося частью периода модуляции, определяются по моментам совпадения частоты излучаемого сигнала с нижней F1 и верхней F2 частотами диапазона перестройки частоты при частотной модуляции.
Заявленный способ обладает совокупностью признаков, неизвестных из уровня техники для способов подобного назначения, что позволяет сделать вывод о соответствии критерию изобретения "новизна".
Для доказательства изобретательского уровня необходимо учесть, что известно использование фидера заданной длины в качестве опорного канала в измерителях расстояния [6, 7]. Однако в указанных способах измерения расстояния длина фидера выполняет роль высокостабильной, известной меры длины, с которой сравнивается измеряемое расстояние. В предлагаемом способе роль фидерной линии и ее параметры другие. Во-первых, ее длина может иметь произвольную долговременную нестабильность, т.к. она не сказывается на результатах кратковременной оценки неравномерности периодов сигнала разностной частоты, а кратковременная нестабильность любой фидерной линии пренебрежимо мала. Во-вторых, фидерная линия используется только для оценки неравномерности периодов сигнала разностной частоты и не используется для вычисления измеряемого расстояния, поэтому ее долговременная нестабильность не сказывается на точности измерения. И, наконец, если уровень помех от паразитных отражателей невелик, то для формирования закона изменения частоты зондирующих волн и для измерения расстояния используются одни и те же эхо-волны, отраженные зондируемой поверхностью (например, при измерении уровня жидкости в емкостях уровнемером, работающим на перфорированный волновод).
Указанные отличия не следуют явным образом из доступных научно-технических источников, что позволяет сделать вывод о соответствии заявляемого технического решения критерию изобретения "изобретательский уровень".
Сущность предлагаемого способа и возможность его практической реализации поясняются с помощью чертежей, приведенных на фиг.1 и 2.
На фиг.1 приведены зависимости от времени частоты зондирующих волн, периодов СРЧ и корректирующего напряжения.
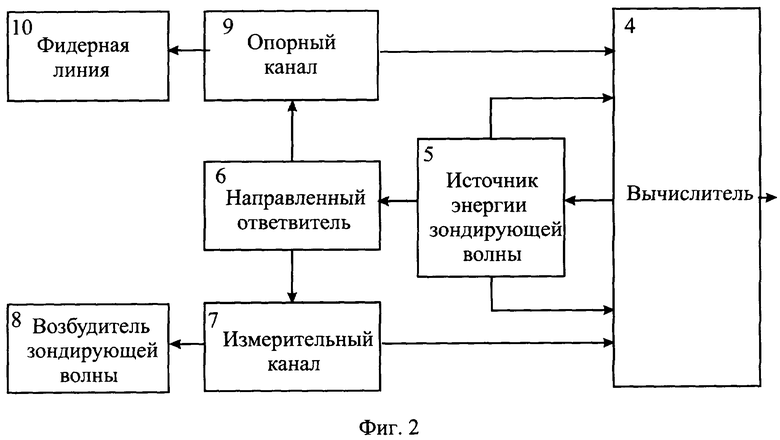
На фиг.2 приведена структурная схема устройства, реализующего предлагаемый способ.
Способ осуществляют следующим образом. На начальном этапе формируют периодически модулированные по частоте зондирующие волны, график 1 изменения частоты которых показан на фиг.1а. После излучения (или возбуждения волноводной перфорированной трубы), приема эхо-волн и смешивания с частью мощности излучаемых волн на выходе смесителя получают СРЧ, длительность мгновенных периодов которого в общем случае непостоянна. График 2 этой зависимости показан на фиг.1б. Далее измеряют длительность каждого мгновенного периода СРЧ и вычисляют его среднее значение внутри интервала обработки, являющегося частью периода модуляции (в частном случае это - половина периода модуляции). Затем вычисляют величину отклонения мгновенной длительности периодов СРЧ от среднего значения и формируют корректирующее напряжение модуляции в соответствии с расчетной формулой, указанной в описании способа. График 3 этой зависимости показан на фиг.1в. Это корректирующее напряжение используется на последующих периодах модуляции для формирования зондирующих волн с новым законом изменения частоты. Указанная процедура постоянно повторяется до снижения неравномерности периодов СРЧ ниже контрольного уровня, обеспечивающего требуемую точность измерения расстояния. Постоянное применение этой процедуры позволяет все время поддерживать такую форму корректирующего напряжения, при которой не происходит превышение неравномерностью периодов СРЧ контрольного уровня.
Предложенный способ формирования зондирующего адаптивного частотно-модулированного сигнала для дальномера с периодической частотной модуляцией может быть реализован в измерителе расстояния, структурная схема которого приведена на фиг.2. Измеритель расстояния с адаптивной частотной модуляцией содержит вычислитель 4, управляемый источник энергии зондирующих волн (УИЭЗВ) 5, направленный ответвитель (НО) 6, измерительный канал (ИК) 7, возбудитель зондирующих волн (ВЗВ) 8, опорный канал (ОК) 9 и фидерную линию (ФЛ) 10. Управляющий выход вычислителя 4 соединен с управляющим входом УИЭЗВ 5, СВЧ выход которого соединен с входом НО 6. Первый выход НО 6 соединен с входом ИК 7, первый выход которого соединен со входом ВЗВ 8, а второй выход - с измерительным входом вычислителя 4. Второй выход НО 6 соединен с входом ОК 9, первый выход которого соединен со входом ФЛ 10. Второй выход ОК 9 соединен с опорным входом вычислителя 4. Второй и третий выходы УИЭЗВ 5 соединены с третьим и четвертым входами вычислителя 4. Второй выход вычислителя 4 является выходом устройства.
Измеритель расстояния работает следующим образом. На начальном этапе работы вычислитель 4 передает на управляющий вход УИЭЗВ 5 периодическое монотонно изменяющееся напряжение треугольной формы. Вследствие нелинейности модуляционной характеристики УИЭЗВ 5 частота сформированных волн на его выходе будет изменяться нелинейно, как показано графиком 1 на фиг.1а. Через НО 6 эти волны поступают на ИК 7 и ОК 9. Эти каналы идентичны и имеют стандартную структуру СВЧ приемника частотно-модулированного сигнала. В состав каждого из них входят два направленных ответвителя, смеситель и усилитель сигнала разностной частоты. С первых выходов этих ИК 7 и ОК 9 сигналы поступают соответственно на ВЗВ 8 и ФЛ 10. Эхо-сигналы с выходов этих блоков поступают обратно соответственно на ИК 7 и ОК 9. Полученные в ИК 7 и ОК 9 два СРЧ поступают на соответствующие входы вычислителя 4. Кроме них, на третий и четвертый входы вычислителя 4 поступают контрольные сигналы со второго и третьего выходов УИЭЗВ 5 в моменты совпадения частоты зондирующих волн с нижней F1 и верхней F2 частотами диапазона перестройки частоты при частотной модуляции.
Вычислитель 4 может в своем составе иметь один или два микропроцессора. По полученному опорному СРЧ вычислитель 4 измеряет зависимость 2 от времени мгновенных периодов опорного СРЧ, показанную на фиг.1б, вычисляет корректирующее напряжение, представленное кривой 3 на фиг.1в, и новое напряжение модуляции на своем управляющем выходе, добавляя корректирующее напряжение к напряжению модуляции, использованному на текущем этапе работы. Далее процесс повторяется в каждом периоде модуляции. В итоге зависимость частоты зондирующих волн от времени принимает линейный характер и исчезает неравномерность периодов опорного СРЧ (а значит, и измерительного сигнала). После снижения неравномерности периодов СРЧ ниже контрольного уровня вычислитель 4 по измерительному СРЧ производит определение расстояния. Таким образом, в процессе работы непрерывно отслеживается и корректируется изменение нелинейности модуляционной характеристики УИЭЗВ 5. При этом автоматически учитываются дисперсионные свойства среды распространения зондирующих волн. Форма модулирующего напряжения всегда будет такой, чтобы не проявлялась неравномерность периодов СРЧ, а отсутствие такой неравномерности является обязательным условием для достижения высокой точности измерения расстояния.
При отсутствии внешних мешающих отражений опорный канал может не использоваться, т.е. блоки 9 и 10 могут быть удалены из схемы. В этом случае опорный и измерительный входы вычислителя соединяются вместе, и на них подается сигнал разностной частоты с выхода измерительного канала.
Компьютерное моделирование и проверка на макете заявленного способа формирования зондирующего адаптивного частотно-модулированного сигнала для дальномера с периодической частотной модуляцией показывают, что он позволяет уменьшить неравномерность периодов сигнала разностной частоты от исходных (50-70%), когда практически невозможно обеспечить приемлемую погрешность измерения расстояния, до десятых долей процента, что устраняет дополнительную погрешность измерения расстояния.
Источники информации
1. Патент США № 5504490 от 2 апр. 1996.
2. Патент США № 5546088 от 13 авг. 1996.
3. Патент США № 6107957 от 22 авг. 2000.
4. Патент США № 5387918 от 7 февр. 1995.
5. Патент РФ № 2151408 от 30.06.1999 G 01 S 13/34.
6. Патент США № 4044355 от 23 авг. 1977.
7. Патент США № 4665403 от 12 мая 1987.
Изобретение относится к области измерительной техники, в частности к измерению расстояния. Способ включает: формирование периодического модулирующего напряжения, генерирование и возбуждение зондирующих волн, прием спустя время распространения отраженных эхо-волн, смешивание их с частью мощности зондирующих волн, выделение сигнала разностной частоты и коррекцию периодического напряжения модуляции по величине отклонения мгновенных периодов сигнала разностной частоты от их среднего значения для уменьшения разности среднего и мгновенного значения длительности периодов до заданного контрольного уровня. Возможны два варианта выполнения коррекции. В первом варианте коррекция и измерение расстояния производятся по одному и тому же сигналу разностной частоты, полученному с использованием эхо-волн, отраженных от зондируемой поверхности. Во втором варианте для коррекции используются эхо-волны, полученные в отрезке опорной фидерной линии, а для измерения расстояния используют эхо-волны, отраженные от зондируемой поверхности. Корректировка напряжения модуляции может производиться путем вычисления корректирующего напряжения, суммируемого с модулирующим напряжением, или путем перестановки исходных отсчетов напряжения модуляции на временной оси. В обоих случаях основой для коррекции является среднее значение периода сигнала разностной частоты. Достигаемым техническим результатом является устранение погрешности при измерении расстояния. 1 с. и 5 з.п. ф-лы, 2 ил.
Uмод,k(tj)=Uмод,k-1(tj)+ΔUk(tj),
где

 - постоянный коэффициент, равный средней крутизне нарастания модулирующего напряжения;
- постоянный коэффициент, равный средней крутизне нарастания модулирующего напряжения;
Uм - амплитуда модулирующего напряжения;
Тм - период модуляции;
 - относительное изменение периода сигнала разностной частоты;
- относительное изменение периода сигнала разностной частоты;
ΔТр(ti)=Tpi-Tср - отклонение периода сигнала разностной частоты от среднего значения;
 - средний период сигнала разностной частоты;
- средний период сигнала разностной частоты;
N - количество пересечений нулевого уровня сигналом разностной частоты за интервал обработки,
причем значения η(t) в промежуточных точках tj между моментами пересечения сигналом разностной частоты нулевого уровня ti расчитываются с помощью формул интерполяции.
Uмод,k(t1)=Uмод,k-1(t1),
Uмод,k((i-1)Tcp)=Uмод,k-1(ti), i=2, 3,...N,
а в промежуточных точках периода модуляции с помощью интерполяции.
| РАДИОЛОКАЦИОННЫЙ ДАЛЬНОМЕР | 1999 |
|
RU2151408C1 |
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 1999 |
|
RU2159923C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАЛЬНОСТИ (ВАРИАНТЫ) | 1999 |
|
RU2154285C1 |
| RU 93032921 А, 10.01.1996 | |||
| US 6492938 А, 10.12.2002 | |||
| СПОСОБ ПОЛУЧЕНИЯ ЭПОКСИКАУЧУКОВОЙ КОМПОЗИЦИИ | 1992 |
|
RU2063336C1 |
| ПЛТЕПТИО- ->&-, | 0 |
|
SU179880A1 |

